JP2020005453A - 電動アクチュエータ - Google Patents
電動アクチュエータ Download PDFInfo
- Publication number
- JP2020005453A JP2020005453A JP2018124582A JP2018124582A JP2020005453A JP 2020005453 A JP2020005453 A JP 2020005453A JP 2018124582 A JP2018124582 A JP 2018124582A JP 2018124582 A JP2018124582 A JP 2018124582A JP 2020005453 A JP2020005453 A JP 2020005453A
- Authority
- JP
- Japan
- Prior art keywords
- electric motor
- case
- motor
- peripheral surface
- electric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 36
- 230000002093 peripheral effect Effects 0.000 claims abstract description 32
- 230000007246 mechanism Effects 0.000 claims abstract description 12
- 238000006243 chemical reaction Methods 0.000 claims abstract description 6
- 230000001105 regulatory effect Effects 0.000 claims description 13
- 229920001973 fluoroelastomer Polymers 0.000 claims 1
- 238000003466 welding Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 238000009423 ventilation Methods 0.000 description 3
- 239000003779 heat-resistant material Substances 0.000 description 2
- 230000001629 suppression Effects 0.000 description 2
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 229910052731 fluorine Inorganic materials 0.000 description 1
- 239000011737 fluorine Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images





Landscapes
- Transmission Devices (AREA)
- Motor Or Generator Frames (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
Description
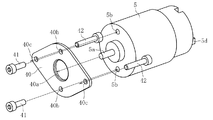
3 駆動伝達機構
4 運動変換機構
5 電動モータ
50 Oリング(弾性部材)
60 モータケース
61 本体部(第1ケース分割体)
61c 位置規制部
62 キャップ部(第2ケース分割体)
62d 端面
Claims (4)
- ケースと、前記ケースに内蔵された電動モータと、前記電動モータの回転運動を直線運動に変換する運動変換機構とを備え、前記電動モータが、その軸方向の一端部側で前記ケースに対して固定された電動アクチュエータにおいて、
前記電動モータにおける前記ケースに固定された一端部側とは反対の他端部側で、前記電動モータの外周面と前記ケースの内周面との間に弾性部材を設けたことを特徴とする電動アクチュエータ。 - 前記電動モータの外周面と前記ケースの内周面とによって前記弾性部材を径方向に圧縮した状態で挟んで保持するように構成した請求項1に記載の電動アクチュエータ。
- 前記ケースは、互いに組み付け可能に構成された第1ケース分割体と第2ケース分割体とを有し、
前記第1ケース分割体及び前記第2ケース分割体の一方のケース分割体の内周面に凸状の位置規制部を設け、
前記位置規制部と、前記一方のケース分割体に組み付けられた他方のケース分割体の端面とによって、前記電動モータに対する前記弾性部材の軸方向両側への移動を規制した請求項1又は2に記載の電動アクチュエータ。 - 前記弾性部材をフッ素ゴムで構成した請求項1から3のいずれか1項に記載の電動アクチュエータ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018124582A JP7195069B2 (ja) | 2018-06-29 | 2018-06-29 | 電動アクチュエータ |
| CA3103198A CA3103198A1 (en) | 2018-06-29 | 2019-06-25 | Electric actuator |
| PCT/JP2019/025116 WO2020004377A1 (ja) | 2018-06-29 | 2019-06-25 | 電動アクチュエータ |
| US16/973,882 US11804751B2 (en) | 2018-06-29 | 2019-06-25 | Electric actuator including a holder that holds a conductive member and an elastic member that is interposed and held between the holder and a case |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018124582A JP7195069B2 (ja) | 2018-06-29 | 2018-06-29 | 電動アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020005453A true JP2020005453A (ja) | 2020-01-09 |
| JP7195069B2 JP7195069B2 (ja) | 2022-12-23 |
Family
ID=69100799
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018124582A Active JP7195069B2 (ja) | 2018-06-29 | 2018-06-29 | 電動アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7195069B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111245154A (zh) * | 2020-03-06 | 2020-06-05 | 徐州东宏机械制造有限公司 | 一种竖置低噪音电动推杆 |
| WO2023047916A1 (ja) * | 2021-09-24 | 2023-03-30 | Ntn株式会社 | 電動アクチュエータ |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56141489U (ja) * | 1980-03-25 | 1981-10-26 | ||
| JPH09191606A (ja) * | 1996-01-09 | 1997-07-22 | Aichi Electric Co Ltd | 電動アクチュエータ |
| JP2015059579A (ja) * | 2013-09-17 | 2015-03-30 | Ntn株式会社 | 歯車およびこれを備えた電動アクチュエータ |
| JP2017163723A (ja) * | 2016-03-10 | 2017-09-14 | シロキ工業株式会社 | モータユニット |
| JP2018071687A (ja) * | 2016-10-31 | 2018-05-10 | Ntn株式会社 | 電動アクチュエータ |
-
2018
- 2018-06-29 JP JP2018124582A patent/JP7195069B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56141489U (ja) * | 1980-03-25 | 1981-10-26 | ||
| JPH09191606A (ja) * | 1996-01-09 | 1997-07-22 | Aichi Electric Co Ltd | 電動アクチュエータ |
| JP2015059579A (ja) * | 2013-09-17 | 2015-03-30 | Ntn株式会社 | 歯車およびこれを備えた電動アクチュエータ |
| JP2017163723A (ja) * | 2016-03-10 | 2017-09-14 | シロキ工業株式会社 | モータユニット |
| JP2018071687A (ja) * | 2016-10-31 | 2018-05-10 | Ntn株式会社 | 電動アクチュエータ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111245154A (zh) * | 2020-03-06 | 2020-06-05 | 徐州东宏机械制造有限公司 | 一种竖置低噪音电动推杆 |
| WO2023047916A1 (ja) * | 2021-09-24 | 2023-03-30 | Ntn株式会社 | 電動アクチュエータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7195069B2 (ja) | 2022-12-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8893847B2 (en) | Electric power steering system | |
| JP5952002B2 (ja) | 車輪駆動装置 | |
| WO2018079549A1 (ja) | 電動アクチュエータ | |
| CN107559382B (zh) | 车辆减速器 | |
| US20160201761A1 (en) | Automobile reducer | |
| JP6599668B2 (ja) | アクチュエータ | |
| JP2020005453A (ja) | 電動アクチュエータ | |
| WO2020004371A1 (ja) | 電動アクチュエータ | |
| JP2007046637A (ja) | 電動リニアアクチュエータ | |
| WO2020004377A1 (ja) | 電動アクチュエータ | |
| JP2020005454A (ja) | 電動アクチュエータ | |
| JP2007232023A (ja) | 電動アクチュエータ | |
| WO2019059355A1 (ja) | 電動アクチュエータ | |
| JP2021025642A (ja) | 電動アクチュエータ | |
| JP6204306B2 (ja) | 伸縮アクチュエータ | |
| JP6254005B2 (ja) | 伸縮アクチュエータ | |
| JP4452981B2 (ja) | ボールねじ機構 | |
| JP2008069793A (ja) | 電動リニアアクチュエータ | |
| JP5882966B2 (ja) | インホイールモータ駆動装置 | |
| US9989142B2 (en) | Linear actuator | |
| WO2021020075A1 (ja) | 電動アクチュエータ | |
| CN113153901A (zh) | 挠性轴承和减速器 | |
| JP2007303514A (ja) | 電動リニアアクチュエータ | |
| JP2015203420A (ja) | 伸縮アクチュエータ | |
| JP2024034794A (ja) | ボールねじ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221004 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7195069 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |