JP2017203655A - 電池状態検出装置、車両、プログラムおよび電池状態検出方法 - Google Patents
電池状態検出装置、車両、プログラムおよび電池状態検出方法 Download PDFInfo
- Publication number
- JP2017203655A JP2017203655A JP2016094332A JP2016094332A JP2017203655A JP 2017203655 A JP2017203655 A JP 2017203655A JP 2016094332 A JP2016094332 A JP 2016094332A JP 2016094332 A JP2016094332 A JP 2016094332A JP 2017203655 A JP2017203655 A JP 2017203655A
- Authority
- JP
- Japan
- Prior art keywords
- current
- storage battery
- voltage
- function
- specific
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims description 24
- 230000008859 change Effects 0.000 claims abstract description 71
- 238000004364 calculation method Methods 0.000 claims abstract description 25
- 230000010287 polarization Effects 0.000 claims description 16
- 238000012806 monitoring device Methods 0.000 abstract description 15
- 230000006870 function Effects 0.000 description 78
- 238000000034 method Methods 0.000 description 33
- 230000008569 process Effects 0.000 description 26
- 238000005259 measurement Methods 0.000 description 20
- 239000007858 starting material Substances 0.000 description 14
- 238000010586 diagram Methods 0.000 description 10
- 238000004891 communication Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- YADSGOSSYOOKMP-UHFFFAOYSA-N dioxolead Chemical compound O=[Pb]=O YADSGOSSYOOKMP-UHFFFAOYSA-N 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- QAOWNCQODCNURD-UHFFFAOYSA-N Sulfuric acid Chemical compound OS(O)(=O)=O QAOWNCQODCNURD-UHFFFAOYSA-N 0.000 description 2
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000013139 quantization Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Landscapes
- Control Of Charge By Means Of Generators (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
- Tests Of Electric Status Of Batteries (AREA)
Abstract
Description
この発明は上述した事情に鑑みてなされたものであり、蓄電池の状態を正確に推定できる電池状態検出装置、車両、プログラムおよび電池状態検出方法を提供することを目的とする。
〈第1実施形態の構成〉
次に、図1に示すブロック図を参照し、本発明の第1実施形態による車両1の詳細を説明する。
車両1は、アイドリングストップ機能を有するいわゆるアイドリングストップ車であり、車両1を駆動するエンジン11と、エンジン11に機械的に結合された発電機12と、発電機12から出力された電力を蓄電する蓄電池10と、ライト、空気調和機、スタータ(特定負荷)14a等の電気負荷である補機負荷14と、車両1の各部を制御するECU(Electronic Control Unit,エンジン制御部、電池状態検出装置)15と、蓄電池10の状態を検知する電池監視装置(電池状態検出装置)30とを有している。蓄電池10としては、例えば鉛蓄電池やニッケル水素蓄電池等を適用することができる。
(ECU15の動作)
次に、本実施形態の動作を説明する。
まず、図3は、ECU15で実行されるアイドリングストップ制御ルーチンのフローチャートである。本ルーチンは、車両1にキーを差し込み、イグニッションをオンにした際に起動され、キーをオフにするまで継続される。
次に、図4は、電池監視装置30で実行される電池状態監視ルーチンのフローチャートである。本ルーチンも、車両1にキーを差し込み、イグニッションをオンにした際に起動され、キーをオフにするまで継続される。
図4において処理がステップS101に進むと、急峻変化条件判定部301(図2参照)は、現在時刻が測定タイミングに至ったか否かを判定する。なお、「測定タイミング」とは、例えば数ミリ秒程度のサンプリング周期毎のタイミングである。サンプリング周期は、0.1秒以下の周期にすることが望ましく、0.01秒以下の周期にすることがより望ましい。ここで「No」と判定されると、現在時刻が測定タイミングに至るまで、ステップS101にて処理が待機する。
具体的には、抵抗関数R(I)は、下式(1)によって表現される。
R(I)=(V0/I0)×F(I/I0;α)×I0/I+R0 …式(1)
ここで、関数F(x;α)の微分値である関数F’(x;α)は下式(2)で表されるため、関数F(x;α)は、下式(3)に示すニュートン法による漸化式で計算することができる。
F[n+1]=F[n]−{exp((1−α)F[n])−exp(−αF[n])−x}/{ (1−α)exp((1−α)F[n])+αexp(−αF[n])} …式(3)
但し、式(3)において、xが関数F(x;α)の変曲点以下である場合は、F[0]=2arcsinh(x/2)とし、xが関数F(x;α)の変曲点を超える場合は、F[0]=ln(|x|)/(1−α)にするとよい。ここで、関数F(x;α)の変曲点は、(2−1/α)×(1/α−1)(2α-1)である。
E2=|V0×{F(Ia/I0;α)− F(Ib/I0;α)}+R0×(Ia−Ib)−(Va−Vb)|2 …式(4)
(但し、j=1,2,…,n)
換言すると、ステップS106は、抵抗関数R(I)のパラメータV0,I0,R0に基づいて、高さスケーリング抵抗R0によって求めた電圧降下実際の電圧降下との偏差(R0×(Ia−Ib)−(Va−Vb))を求め、横方向スケーリング電流I0を偏差に比例した値(微小値)で更新し、偏差の二乗和(Em)が最小になるように、パラメータV0,I0,R0を求めていることになる。
OCV=V−R(I)×I …式(6)
ここで、電圧Vおよび電流Iは、電圧センサ31および電流センサ32で得られた測定値である。抵抗関数R(I)は、式(1)に示した通りである。
R(Ic)×Ic+r0×Ic=OCV …式(7)
ここで、r0は、補機負荷14に含まれるスタータ14aの抵抗値(以下、スタータ抵抗値(特定負荷抵抗値)という)である。なお、スタータ抵抗値r0は、配線抵抗を含む値である。スタータ抵抗値r0は、温度Tによって変化するため、クランキング時毎に計算することが望ましい。例えば、直前のクランキング時における電圧Vの最低値を電圧Vstとし、該電圧Vstが現れた際の電流Iを電流Istとすると、スタータ抵抗値r0は「r0=Vst/Ist」によって求めるとよい。
V0×F(Ic/I0;α)+(R0+r0)×Ic=OCV …式(8)
x(n+1)=x(n)−{exp(x(n))−1+(Ax(n)−B)exp(αx(n))}/{ (1−α)exp(x(n))+α+Aexp(αx(n))} …式(9)
A=V0/(R0+r0)であり、
B=OCV/(R0+r0)である。
Bが関数F(x;α)の変曲点以下である場合は、x(0)=arcsinh(B/2)/Bとすればよく、Bが関数F(x;α)の変曲点を超える場合は、x(0)=ln(|B|)/(1−α)とするとよい。上述したように、関数F(x;α)の変曲点は(2−1/α)×(1/α−1)(2α-1)である。
SOF=Ic×r0 …式(10)
本実施形態によるデータを図6(a),(b)に示す。図6(a),(b)は、SOCがそれぞれ80%、90%であるときに、軽自動車用鉛蓄電池に0[A]から所定の電流I(図示の例では−300〜100[A])までステップ応答させたときの電圧変化量をΔVとし、縦軸に電圧変化量ΔV、横軸を電流Iとした相関図である。
次に、図7に示すブロック図を参照し、本発明の第2実施形態による車両2の詳細を説明する。
本実施形態の車両2は、第1実施形態の車両1における電池監視装置30に代えて、測定部40が設けられている点で相違する。測定部40は、電圧センサ31、電流センサ32、温度センサ37等のセンサ(図1参照)を有しており、これらセンサの検出信号はECU15に供給される。
本発明は上述した実施形態に限定されるものではなく、種々の変形が可能である。上述した実施形態は本発明を理解しやすく説明するために例示したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施形態の構成の一部を他の実施形態の構成に置き換えることが可能であり、また、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について削除し、若しくは他の構成の追加・置換をすることが可能である。上記実施形態に対して可能な変形は、例えば以下のようなものである。
しかし、電圧Vの変化を測定し、電圧変化量ΔVの絶対値が電圧閾値ΔVthを超える場合に、急峻変化条件を満たすことにしてもよい。
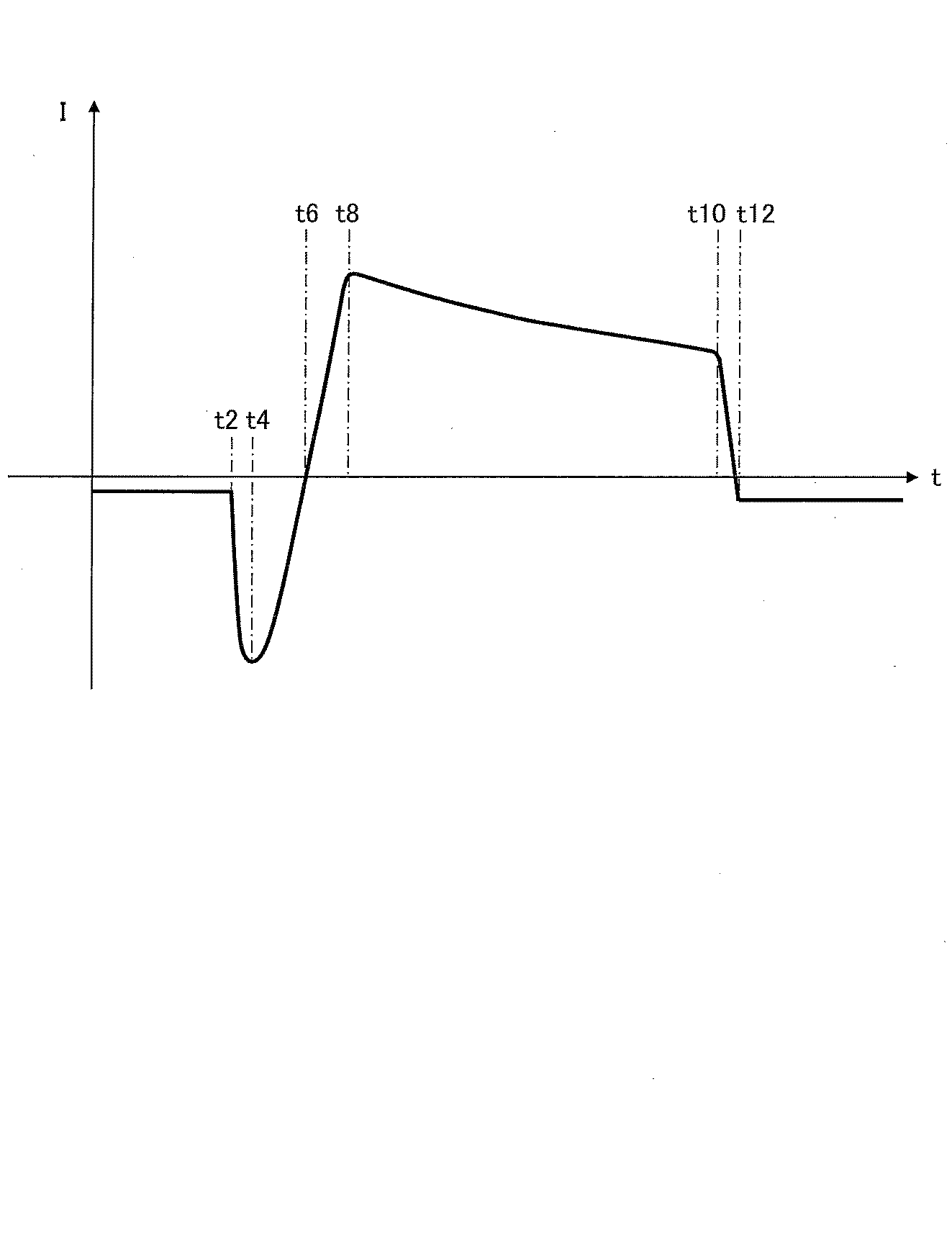
また、「上記各期間内(時刻t2〜t4、t4〜t6、t10〜t12)であること」と、「|ΔI|>ΔIthが成立すること」との双方を充足した場合に急峻変化条件が満たされることとしてもよい。
e(j)=V0×{F(Ia(j)/I0;α)− F(Ib(j)/I0;α)}+R0×(Ia(j)−Ib(j))−(Va(j)−Vb(j)),
V0(n+1)=V0(n)−ε×Σe(j)×{F(Ia(j)/I0;α)− F(Ib(j)/I0;α)},
R0(n+1)=R0(n)−ε×Σe(j)×{ Ia(j)−Ib(j)},
1/I0(n+1)=1/I0(n)−ε×V0(n)×Σe(j)×{F’(Ia(j)/I0;α)− F’(Ib(j)/I0;α)}
…式(11)
r=R(I)×(Ie/Ir−1) …式(14)
R(Ic)×Ic+(r+r0)×Ic=OCV …式(15)
なお、式(15)において、r0はスタータ抵抗値、rはクランキング時の分極抵抗値、OCVは非定常開放電圧である。もしくは、“クランキング時最低電圧補正電圧=OCV推定値×定数1+クランキング中の電荷×定数2+定数3”としてもよい。定数1、定数2、定数3は過去のクランキング時のデータより最小二乗で推定してもよい。クランキング時最低電圧補正電圧の過去実績値とは、クランキング開始電圧―クランキング中最低電圧とし、クランキング中の電荷は、クランキング開始から最低クランキング電圧を与えるまでの電流積分とする。この場合、推定SOFは、式(10)にクランキング時最低電圧補正電圧を加えたものとして出力させる。
Ic(n+1)=Ic(n)−{V0×F(Ic(n)/I0)+(r0+R0)×Ic(n)−OCV}/{V0×F’(Ic(n)/I0)/I0+(r0+R0)}
…式(16)
以上のように、各実施形態における電池状態検出装置(15,30)は、
蓄電池(10)に流れる電流(I)または蓄電池(10)の電圧(V)が、所定時間内に所定値を超える変化があった旨の急峻変化条件を満たしているか否かを判定する急峻変化条件判定部(301)と、
急峻変化条件が満たされていることを条件として、蓄電池(10)の内部抵抗の電流(I)に対する関数である抵抗関数(R(I))を同定する抵抗関数同定部(302)と、
同定された抵抗関数(R(I))を用いて、蓄電池(10)に特定負荷(14a)が接続された際の電流(I)である特定電流(Ic)を算出する特定電流算出部(304)と、
を有することを特徴とする。
これにより、急峻変化条件が生じた場合に抵抗関数(R(I))を同定することができ、精密な抵抗関数(R(I))を得ることによって蓄電池の状態を正確に推定できる。
特定電流(Ic)は、車両(1,2)が停止した際にエンジン(11)を停止させ、しかる後にエンジン(11)を始動した場合に特定負荷(14a)に流れる電流であり、
電池状態検出装置(15,30)は、
特定電流(Ic)に基づいて、エンジン(11)を始動した際の電圧(V)の推定値である電圧推定値(SOF)を算出する電圧推定部(306)と、
電圧推定値(SOF)に基づいて、起動中のエンジン(11)の停止の可否、または停止しているエンジン(11)の始動の要否を判定するエンジン制御部(15)と、
をさらに有することを特徴とする。
これにより、エンジン(11)の停止の可否、または、停止しているエンジン(11)の始動の要否を適切に判定することができる。
エンジン(11)の始動を開始した後に電流(I)に極小値が現れるまでの期間(t2〜t4)、電流(I)に極小値が現れた後に電流(I)が零になるまでの期間(t4〜t6)、または、エンジン(11)が停止された後に電流(I)が零になるまでの期間(t10〜t12)のうち、一または複数の期間において、急峻変化条件を満たしたものと判定する
ことを特徴とする。
これにより、適切な期間内に抵抗関数(R(I))を同定することができる。
スケーリング電流(I0)と、スケーリング電圧(V0)と、スケーリング抵抗(R0)とを抵抗関数(R(I))のパラメータとし、スケーリング抵抗(R0)によって求めた電圧降下と実際の電圧降下との偏差(E)を求める機能と、
スケーリング電流(I0)を、偏差(E)に比例した値(微小値)で更新し、偏差(E)の二乗和(Em)が最小になるようにスケーリング電圧(V0)と、スケーリング抵抗(R0)と、スケーリング電流(I0)とを求める機能と、
を有することを特徴とする。
これにより、正確なスケーリング電圧(V0)、スケーリング抵抗(R0)およびスケーリング電流(I0)を求めることができる。
を有することを特徴とする
これにより、エンジン(11)の停止の可否、または、停止しているエンジン(11)の始動の要否を適切に判定することができる。
ことを特徴とする。
これにより、非定常開放電圧(OCV)を正確に推定することができる。
ことを特徴とする。
これにより、特定負荷抵抗値(r0)を正確に算出することができ、蓄電池(10)の状態をより正確に検出することができる。
分極抵抗値(r)に基づいて、次回に特定負荷(14a)を蓄電池(10)に接続する際の特定電流(Ic)の推定値を更新する
ことを特徴とする。
これにより、特定電流(Ic)を正確に推定でき、蓄電池(10)の状態をより正確に検出することができる。
10 蓄電池
11 エンジンン
12 発電機
14 補記負荷
14a スタータ(特定負荷)
15 ECU(エンジン制御部、電池状態検出装置)
30 電池監視装置(電池状態検出装置)
301 急峻変化条件判定部(急峻変化条件判定手段)
302 抵抗関数同定部(抵抗関数同定手段)
304 クランキング電流算出部(特定電流算出部、特定電流算出手段)
306 電圧推定部(電圧推定手段)
ΔIth (閾値)
I0 横方向スケーリング電流(スケーリング電流)
Ic クランキング電流(特定電流)
r0 スタータ抵抗値(特定負荷抵抗値)
Claims (13)
- 蓄電池に流れる電流または前記蓄電池の電圧が、所定時間内に所定値を超える変化があった旨の急峻変化条件を満たしているか否かを判定する急峻変化条件判定部と、
前記急峻変化条件が満たされていることを条件として、前記蓄電池の内部抵抗の前記電流に対する関数である抵抗関数を同定する抵抗関数同定部と、
同定された前記抵抗関数を用いて、前記蓄電池に特定負荷が接続された際の前記電流である特定電流を算出する特定電流算出部と、
を有することを特徴とする電池状態検出装置。 - 前記特定負荷は、車両に搭載されたエンジンを始動するものであり、
前記特定電流は、前記車両が停止した際に前記エンジンを停止させ、しかる後に前記エンジンを始動した場合に前記特定負荷に流れる前記電流であり、
前記特定電流に基づいて、前記エンジンを始動した際の前記電圧の推定値である電圧推定値を算出する電圧推定部と、
前記電圧推定値に基づいて、起動中の前記エンジンの停止の可否、または停止している前記エンジンの始動の要否を判定するエンジン制御部と、
をさらに有することを特徴とする請求項1に記載の電池状態検出装置。 - 前記急峻変化条件判定部は、
前記エンジンの始動を開始した後に前記電流に極小値が現れるまでの期間、前記電流に前記極小値が現れた後に前記電流が零になるまでの期間、または、前記エンジンが停止された後に前記電流が零になるまでの期間のうち、一または複数の期間において、前記急峻変化条件を満たしたものと判定する
ことを特徴とする請求項2に記載の電池状態検出装置。 - 前記抵抗関数同定部は、前記抵抗関数を、バトラーボルマー式に基づいて算出する
ことを特徴とする請求項3に記載の電池状態検出装置。 - 前記抵抗関数同定部は、
スケーリング電流と、スケーリング電圧と、スケーリング抵抗とを前記抵抗関数のパラメータとし、前記スケーリング抵抗によって求めた電圧降下と実際の電圧降下との偏差を求める機能と、
前記スケーリング電流を、前記偏差に比例した値で更新し、前記偏差の二乗和が最小になるように前記スケーリング電圧と、前記スケーリング抵抗と、前記スケーリング電流とを求める機能と、
を有することを特徴とする請求項4に記載の電池状態検出装置。 - 前記特定電流算出部は、前記蓄電池の非定常開放電圧を推定する機能と、前記非定常開放電圧に基づいて前記特定電流を算出する機能と、前記特定電流に基づいて、前記蓄電池に前記特定負荷が接続された際の前記蓄電池の電圧推定値を算出する機能と、
を有することを特徴とする請求項5に記載の電池状態検出装置。 - 前記特定電流算出部は、前記非定常開放電圧を、現在の前記電圧と、現在の前記電流と、バトラーボルマー式と、前記スケーリング抵抗とに基づいて推定する
ことを特徴とする請求項6に記載の電池状態検出装置。 - 前記特定電流算出部は、前記特定負荷に前記蓄電池を接続した際の前記蓄電池の前記電圧と、前記特定負荷に流れた実際の前記電流とに基づいて、前記特定負荷の抵抗値である特定負荷抵抗値を算出する機能を有する
ことを特徴とする請求項7に記載の電池状態検出装置。 - 前記特定電流算出部は、前記特定負荷に前記蓄電池を接続した際に前記蓄電池に流れる前記電流と、事前に求めた前記特定電流とに基づいて、前記蓄電池の分極抵抗値を求める機能と、
前記分極抵抗値に基づいて、次回に前記特定負荷を前記蓄電池に接続する際の前記特定電流の推定値を更新する
ことを特徴とする請求項7に記載の電池状態検出装置。 - 前記急峻変化条件は、0.1秒以下の期間内に、前記蓄電池に流れる前記電流に20アンペア以上の変化が生じたという条件である
ことを特徴とする請求項1に記載の電池状態検出装置。 - 蓄電池と、
前記蓄電池を適宜充電するエンジンと、
前記蓄電池に流れる電流または前記蓄電池の電圧が、所定の急峻変化条件を満たしているか否かを判定する急峻変化条件判定部と、
前記急峻変化条件が満たされていることを条件として、前記蓄電池の内部抵抗の前記電流に対する関数である抵抗関数を同定する抵抗関数同定部と、
同定された前記抵抗関数を用いて、前記蓄電池に特定負荷が接続された際の前記電流である特定電流を算出する特定電流算出部と、
を有することを特徴とする車両。 - コンピュータを、
蓄電池に流れる電流または前記蓄電池の電圧が、所定の急峻変化条件を満たしているか否かを判定する急峻変化条件判定手段、
前記急峻変化条件が満たされていることを条件として、前記蓄電池の内部抵抗の前記電流に対する関数である抵抗関数を同定する抵抗関数同定手段、
同定された前記抵抗関数を用いて、前記蓄電池に特定負荷が接続された際の前記電流である特定電流を算出する特定電流算出手段、
として機能させることを特徴とするプログラム。 - 蓄電池に流れる電流または前記蓄電池の電圧が、所定の急峻変化条件を満たしているか否かを判定する過程と、
前記急峻変化条件が満たされていることを条件として、前記蓄電池の内部抵抗の前記電流に対する関数である抵抗関数を同定する過程と、
同定された前記抵抗関数を用いて、前記蓄電池に特定負荷が接続された際の前記電流である特定電流を算出する過程と、
を有することを特徴とする電池状態検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016094332A JP6701936B2 (ja) | 2016-05-10 | 2016-05-10 | 電池状態検出装置、車両、プログラムおよび電池状態検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016094332A JP6701936B2 (ja) | 2016-05-10 | 2016-05-10 | 電池状態検出装置、車両、プログラムおよび電池状態検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017203655A true JP2017203655A (ja) | 2017-11-16 |
| JP6701936B2 JP6701936B2 (ja) | 2020-05-27 |
Family
ID=60322108
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016094332A Active JP6701936B2 (ja) | 2016-05-10 | 2016-05-10 | 電池状態検出装置、車両、プログラムおよび電池状態検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6701936B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019132780A (ja) * | 2018-02-01 | 2019-08-08 | 古河電気工業株式会社 | 充電可能電池状態検出装置および充電可能電池状態検出方法 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007223530A (ja) * | 2006-02-24 | 2007-09-06 | Denso Corp | バッテリの状態量演算装置 |
| JP2008533486A (ja) * | 2005-03-16 | 2008-08-21 | エルジー・ケム・リミテッド | バッテリーの充電状態を推定する装置及び方法 |
| JP2008243373A (ja) * | 2007-03-23 | 2008-10-09 | Toyota Motor Corp | 二次電池の状態推定装置 |
| JP2009109476A (ja) * | 2007-06-15 | 2009-05-21 | Avago Technologies Ecbu Ip (Singapore) Pte Ltd | 高電圧アイソレーション付きの集積バッテリー電圧センサ、バッテリー電圧感知システム、及びバッテリー電圧感知方法 |
| JP2010230654A (ja) * | 2009-03-03 | 2010-10-14 | Denso Corp | バッテリの状態検出装置 |
| JP2013032966A (ja) * | 2011-08-02 | 2013-02-14 | Toyota Motor Corp | 二次電池の監視装置 |
| JP2013541700A (ja) * | 2010-08-27 | 2013-11-14 | 日本テキサス・インスツルメンツ株式会社 | 複数のパラメータ更新レートを用いた充電可能なバッテリのモニタリング |
| JP2014148232A (ja) * | 2013-01-31 | 2014-08-21 | Sanyo Electric Co Ltd | 車載用蓄電システム、情報端末 |
| US20150072198A1 (en) * | 2013-09-10 | 2015-03-12 | Robert Bosch Gmbh | Battery Cell Unit and Method for determining a Complex Impedance of a Battery Cell arranged in a Battery Cell Unit |
| JP2016009633A (ja) * | 2014-06-25 | 2016-01-18 | トヨタ自動車株式会社 | 電池システム |
| US20160103184A1 (en) * | 2014-10-09 | 2016-04-14 | Denso Corporation | Battery state estimation apparatus |
| JP2016065828A (ja) * | 2014-09-25 | 2016-04-28 | 富士通株式会社 | 推定プログラム、推定方法および推定装置 |
| JP2016080693A (ja) * | 2014-10-09 | 2016-05-16 | 株式会社デンソー | 電池状態推定装置 |
-
2016
- 2016-05-10 JP JP2016094332A patent/JP6701936B2/ja active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008533486A (ja) * | 2005-03-16 | 2008-08-21 | エルジー・ケム・リミテッド | バッテリーの充電状態を推定する装置及び方法 |
| JP2007223530A (ja) * | 2006-02-24 | 2007-09-06 | Denso Corp | バッテリの状態量演算装置 |
| JP2008243373A (ja) * | 2007-03-23 | 2008-10-09 | Toyota Motor Corp | 二次電池の状態推定装置 |
| JP2009109476A (ja) * | 2007-06-15 | 2009-05-21 | Avago Technologies Ecbu Ip (Singapore) Pte Ltd | 高電圧アイソレーション付きの集積バッテリー電圧センサ、バッテリー電圧感知システム、及びバッテリー電圧感知方法 |
| JP2010230654A (ja) * | 2009-03-03 | 2010-10-14 | Denso Corp | バッテリの状態検出装置 |
| JP2013541700A (ja) * | 2010-08-27 | 2013-11-14 | 日本テキサス・インスツルメンツ株式会社 | 複数のパラメータ更新レートを用いた充電可能なバッテリのモニタリング |
| JP2013032966A (ja) * | 2011-08-02 | 2013-02-14 | Toyota Motor Corp | 二次電池の監視装置 |
| JP2014148232A (ja) * | 2013-01-31 | 2014-08-21 | Sanyo Electric Co Ltd | 車載用蓄電システム、情報端末 |
| US20150072198A1 (en) * | 2013-09-10 | 2015-03-12 | Robert Bosch Gmbh | Battery Cell Unit and Method for determining a Complex Impedance of a Battery Cell arranged in a Battery Cell Unit |
| JP2016009633A (ja) * | 2014-06-25 | 2016-01-18 | トヨタ自動車株式会社 | 電池システム |
| JP2016065828A (ja) * | 2014-09-25 | 2016-04-28 | 富士通株式会社 | 推定プログラム、推定方法および推定装置 |
| US20160103184A1 (en) * | 2014-10-09 | 2016-04-14 | Denso Corporation | Battery state estimation apparatus |
| JP2016080693A (ja) * | 2014-10-09 | 2016-05-16 | 株式会社デンソー | 電池状態推定装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019132780A (ja) * | 2018-02-01 | 2019-08-08 | 古河電気工業株式会社 | 充電可能電池状態検出装置および充電可能電池状態検出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6701936B2 (ja) | 2020-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10656210B2 (en) | Secondary battery state detection device and secondary battery state detection method | |
| KR101414890B1 (ko) | 2차 배터리용 용량 추정 장치 | |
| CN108885242B (zh) | 二次电池劣化估计装置和二次电池劣化估计方法 | |
| CN111431261B (zh) | 车辆用电源系统 | |
| US7202632B2 (en) | Battery management apparatus | |
| US10295605B2 (en) | State detecting method and state detecting device of secondary battery | |
| KR100996693B1 (ko) | 2차전지의 충전상태추정장치 및 충전상태추정방법 | |
| US7990111B2 (en) | Method and apparatus for detecting internal electric state of in-vehicle secondary battery | |
| US10928458B2 (en) | Secondary battery state detection device and secondary battery state detection method | |
| JP6029751B2 (ja) | 蓄電池状態検知装置および蓄電池状態検知方法 | |
| JP5242997B2 (ja) | バッテリ状態管理方法及びバッテリ状態管理装置 | |
| JP4907519B2 (ja) | バッテリ状態監視装置 | |
| JP2007179968A (ja) | バッテリ状態管理装置 | |
| WO2019230033A1 (ja) | パラメータ推定装置、パラメータ推定方法及びコンピュータプログラム | |
| JP2010500539A (ja) | 容量に依存したパラメータに基づくバッテリ容量検出方法 | |
| US10830824B2 (en) | System and a method for determining state-of-charge of a battery | |
| JP2010019595A (ja) | 蓄電デバイスの残存容量演算装置 | |
| JP2013246088A (ja) | 電池の内部抵抗推定方法及びその装置 | |
| JP2010203854A (ja) | 二次電池の内部状態推定装置 | |
| JP2018169281A (ja) | 二次電池状態検出装置および二次電池状態検出方法 | |
| JP4785056B2 (ja) | 充電率推定方法、充電率推定装置及び二次電池電源システム | |
| CN111856303B (zh) | 电池电阻测量装置 | |
| JP6701936B2 (ja) | 電池状態検出装置、車両、プログラムおよび電池状態検出方法 | |
| JP5495560B2 (ja) | 蓄電池の既定値を認識する方法 | |
| JP2007028844A (ja) | バッテリ状態管理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200420 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6701936 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |