以下、本発明を具体化した実施形態を図面に基づいて説明する。本実施形態は、車両に搭載されたエンジンの制御システムを具体化している。当該制御システムでは、電子制御ユニット(以下、ECUという)を中枢としてエンジンの運転状態等を制御する。本システムの全体概略図を図1に示す。
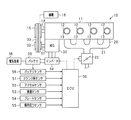
図1に示す車両10において、エンジン11は、ガソリン等の燃料の燃焼によって駆動され、吸気、圧縮、膨張及び排気の各行程を繰り返し実施する4サイクルエンジンである。エンジン11は、4つのシリンダ(気筒)12を有し、各シリンダ12にはピストン13がそれぞれ収容されている。また、エンジン11は、燃料噴射弁(図示せず)や点火装置(図示せず)等を適宜備えている。なお、本実施形態では、4気筒のエンジンを示しているが、エンジンの気筒数はいくつであってもよい。また、エンジン11はガソリンエンジンに限定されず、ディーゼルエンジンであってもよい。
シリンダ12には、吸気部20から空気が供給される。吸気部20は、吸気マニホールド21を有し、吸気マニホールド21の上流には、吸入空気量を調整するスロットルバルブ22が設けられている。
エンジン11には、MG(モータジェネレータ)30が一体に設けられている。MG30は、電動機及び発電機として駆動する回転電機である。エンジン11のクランク軸(エンジン出力軸)14は、クランクプーリ15に機械的に接続され、MG30の回転軸31は、MGプーリ32に機械的に接続されている。そして、クランクプーリ15とMGプーリ32とは、ベルト33により駆動連結されている。エンジン始動時には、MG30の回転によりエンジン11に初期回転(クランキング回転)が付与される。なお、別途スタータモータを設け、スタータモータの回転によりエンジン11に初期回転を付与する構成としてもよい。
また、MG30は、電力変換回路であるインバータ34を介してバッテリ35に接続されている。MG30が電動機として駆動する場合には、ECU50の指令により、電力がバッテリ35からインバータ34を介してMG30に供給される。その結果、MG30が駆動する。インバータ34には、ECU50の指令を受けてインバータ34の電力変換回路を制御する別のECUが設けられていてもよい。一方、MG30が発電機として機能する場合には、MG30で発電した電力が、インバータ34で交流から直流に変換された後、バッテリ35に充電される。なお、バッテリ35には、ランプ類やオーディオ装置等の電気負荷36が接続されている。
車両10には、クランク軸14の回転により駆動される補機装置として、MG30以外に、ウォーターポンプ、燃料ポンプ、エアコンコンプレッサといった補機16が搭載されている。なお、補機装置には、補機16のようにベルト等によりエンジン11に駆動連結されたもの以外に、クランク軸14との結合状態がクラッチ手段により断続されるものが含まれる。
ECU50は、周知のCPU、ROM、RAM等よりなるマイクロコンピュータ等を備えてなる電子制御装置であり、本システムに設けられている各種センサの検出結果に基づいて、スロットルバルブ22の開度制御や、燃料噴射弁による燃料噴射の制御など各種エンジン制御を実施する。
センサ類について詳しくは、ECU50には、クランク軸14の回転位置及びエンジン回転速度Neを検出するクランク角センサ51、アクセル操作量(アクセル開度)を検出するアクセルセンサ52、車速を検出する車速センサ53、ブレーキペダルの操作量を検出するブレーキセンサ54、気筒内の筒内圧力を検出する筒内圧力センサ55、バッテリ35のバッテリ状態を検出するバッテリセンサ56が接続されており、これら各センサからの信号がECU50に逐次入力されるようになっている。
クランク角センサ51は、所定のクランク角ごとに(例えば、10°CA周期で)矩形状の検出信号(クランクパルス信号)を出力する電磁ピックアップ式の回転位置検出手段などがある。クランク軸14が10°CA回転する度に要した時間からエンジン回転速度Neが算出される。また、回転位置の検出結果によれば、所定の基準位置(例えば圧縮上死点)に対するクランク軸14の回転位置が算出される他、エンジン11の行程判別が実施されるようになっている。
バッテリセンサ56は、バッテリ35の端子間電圧や充放電電流等を検出する。これら検出値に基づいて、バッテリ35のバッテリ残容量(SOC)が算出される。
また、ECU50は、エンジン11のアイドリングストップ制御を行う。アイドリングストップ制御は、概略として、所定の自動停止条件が成立するとエンジン11の燃焼が停止されるとともに、その後、所定の再始動条件が成立するとエンジン11が再始動される。この場合、自動停止条件には、例えば、自車両の車速がエンジン自動停止速度域(例えば、車速≦10km/h)にあり、かつアクセル操作が解除されたこと又はブレーキ操作が行われたことが含まれる。また、再始動条件としては、例えば、アクセル操作が開始されたことや、ブレーキ操作が解除されたことが含まれる。なお、エンジン制御機能とアイドリングストップ機能とを別々のECU50にて実施する構成にすることも可能である。
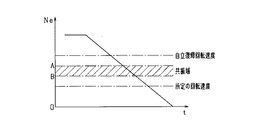
ここで、車両10において、アイドル状態からエンジン11の自動停止条件が成立すると、エンジン11の燃焼は停止される。その後、エンジン回転速度Neは徐々に低下し、ゼロとなる。図2には、エンジン11の燃焼が停止され、エンジン回転速度Neがゼロとなるまでの回転降下期間におけるエンジン回転速度Neの推移を示す。エンジン回転速度Neの低下に伴い、エンジン回転速度Neは、自立復帰回転速度、エンジンの共振域、予め設定した所定の回転速度(例えば、200rpm程度)を通過する。ここで、自立復帰回転速度は、エンジン11の燃焼停止中にクランキングをすることなく燃料供給の再開により、エンジンの再始動が可能な回転速度の下限であり、例えば、500rpm程度に設定される。
エンジンの共振域は、共振が生じるエンジン回転速度の領域をいい、例えば、300〜400rpmに設定される。ここで、共振とは、エンジン回転速度に対応する加振周波数が、エンジン本体や自動変速機などのパワープラントの共振周波数と一致することで励起される現象である。この現象により、エンジンの共振域では振動が増大する。このように、共振域の振動は、エンジンが停止する際に発生する不快な振動の一つの要因となっている。
なお、エンジンの共振域は、共振による振動が極力生じないようにアイドル回転速度よりも低回転側で、かつコンベンショナルなスタータのクランキング回転速度よりも高回転側に設けられている。そのため、エンジンの燃焼が停止された後、エンジン回転速度Neがゼロに到達するまでの回転降下期間において、エンジン回転速度Neは共振域を通過することとなる。
一方、エンジンの回転が停止する間際においても、エンジンの揺り戻し(逆回転)によって、振動は発生する。この振動は、エンジンが停止する際に、気筒内の圧縮反力によってピストンが下死点方向へ押し戻されることで発生する。なお、共振域で発生した振動が、逆回転の振動に対して悪影響を及ぼす。
本実施形態は、エンジン11の燃焼が停止され、エンジン回転速度Neがゼロとなるまでの回転降下期間におけるエンジン制御について示している。ここでは、回転降下期間をエンジン回転速度Neに基づいて3つの期間に分割した。すなわち、エンジン11の燃焼が停止してからエンジン回転速度Neが共振域を含む所定回転速度域の上限値(具体的には、共振域の高回転側の境界値A)に達するまでの期間を第1期間とし、エンジン回転速度Neが所定回転速度域に属する期間を第2期間とし、エンジン回転速度Neが所定回転速度域の下限値(具体的には、共振域の低回転側の境界値B)を通過してからエンジン回転速度Neがゼロとなるまでの期間を第3期間とした。本実施形態では、それぞれの期間に応じてエンジン制御を行っている。
第1期間においては、自動停止条件が成立しエンジン11の燃焼が停止されると、スロットルバルブ22の開度をアイドル回転状態より大きい開度とする。これにより、エンジンの再始動に必要な空気量を確保する。
第2期間においては、共振域を含む所定回転速度域でのエンジン回転速度Neの降下速度を大きくする回転降下処理を実施する。これにより、共振域を通過する時間を短縮することができ、共振域に起因して発生する振動が抑えられる。
また、第3期間においては、クランク軸14の回転停止時にピストン13を膨張行程前半のクランク回転位置に停止させるように、クランク軸14に対して逆回転側のトルク(逆トルク)を付与する。これにより、エンジンの逆回転が抑制され、それに起因して発生する振動が抑えられる。
図3は、エンジン制御についての処理手順を示すフローチャートであり、本処理は、ECU50により所定周期(例えば、10ms)で繰り返し実行される。
まず、フラグについて説明する。図中の第1フラグ、第2フラグ及び第3フラグは、それぞれ上述した第1期間、第2期間及び第3期間に対応しており、エンジン回転速度Neがそれぞれの期間に属しているか否かを示すフラグである。各フラグは、「1」の場合にエンジン回転速度Neが当該期間に属していることを示し、「0」の場合に当該期間に属していないことを示す。なお、初期設定ではいずれも「0」にセットされている。
ステップS11では、第3フラグが「1」であるか否かを判定し、ステップS12では、第2フラグが「1」であるか否かを判定し、ステップS13では、第1フラグが「1」であるか否かを判定する。初期の状態で、ステップS11〜ステップS13が否定されると、ステップS14に進み、エンジン自動停止条件が成立したか否かを判定する。そして、ステップS14が否定された場合は、そのまま本処理を終了する。
一方、ステップS14でエンジン自動停止条件が成立したと判定した場合は、ステップS15に進み、第1フラグに「1」をセットする。続くステップS16では、エンジン11の燃焼を停止し、ステップS17に進む。ステップS17では、スロットルバルブ22の開度を、アイドル回転状態での開度よりも大きい開度とし(具体的には、開度をアイドル回転状態での開度に対して+10%以上とし、例えば全開とする)、本処理を終了する。
このように、エンジン11の燃焼が停止した際に、スロットルバルブ22の開度をアイドル回転状態での開度よりも大きい開度とするように制御している。なお、ステップS17の処理が、「スロットル制御部」に相当する。
一方、ステップS13で第1フラグが「1」と判定した場合は、ステップS18に進み、エンジン回転速度Neが、所定回転速度域の上限値である所定回転速度Ne1以下であるか否かを判定する。なお、本実施形態では、所定回転速度Ne1として共振域の高回転側の境界値Aを設定した。つまり、ステップS18では、エンジン回転速度Neが共振域の高回転側の境界値Aに到達したか否かを判定する。
ステップS18で、エンジン回転速度Neが所定回転速度Ne1よりも大きいと判定した場合は、そのまま本処理を終了する。一方、ステップS18で、エンジン回転速度Neが所定回転速度Ne1以下であると判定した場合、つまりエンジン回転速度Neが共振域に移行した場合は、ステップS19に進み、第2フラグを「1」にセットするとともに、第1フラグを「0」にリセットする。
エンジン回転速度Neが共振域に移行すると、エンジン回転速度Neの降下速度を大きくする処理を実行する。降下速度を大きくする処理として、本実施形態では、補機装置であるMG30を用いて逆トルクを付与している。そして、ステップS20では、まず逆トルクの設定を行う。
MG30は、発電機としての発電機能及び電動機としての力行機能を有し、各機能を用いて逆トルクの付与が実行される。ここで、力行駆動は、回生発電に比べて逆トルクが大きく、回生発電は、力行駆動に比べて燃料消費の面で優れている。そのため、運転状態に合わせて、各機能が使い分けられることが望ましい。かかる場合、いずれの機能を用いるかは、様々なパラメータに基づいて判断される。本実施形態では、バッテリ35に接続される電気負荷36の消費電力量、バッテリ35の残容量の状態、逆トルクの付与に必要な要求トルク量、補機16の運転による負荷に応じて、MG30の回生発電及び力行駆動を選択する構成とした。また、この場合、電気負荷36の消費電力量が大きい場合や補機16の負荷が大きい場合は、回生発電を選択し、バッテリ35の電気残量が大きい場合や逆トルクの要求トルク量が大きい場合は、力行駆動を選択するとした。
図4に、逆トルク設定のフローチャートを示す。まずステップS31では、電気負荷36の消費電力量が所定値以上か否かを判定する。例えば、電気負荷36としては、ランプ類や電動ポンプ等が挙げられる。より具体的には、ブレーキペダルが踏み込まれているか否かを判定する。ブレーキペダルが踏み込まれた状態は、ブレーキランプが点灯するため、消費電力量が大きくなる。ステップS31で、ブレーキペダルが踏み込まれていると判定した場合は、ステップS32へ進み、回生発電により逆トルクを付与することを決定する。この場合は、電気負荷36による消費電力量が大きくなっている状況であるため、回生発電を利用することでバッテリ35の負担を軽減しつつ、振動を抑制することができる。
一方、ステップS31が否定された場合は、ステップS33へ進み、バッテリ35の残容量に応じて機能を選択する。ここでは、例えば、バッテリ35のSOCが閾値Th1以上であるか否かを判定する。ステップS33で閾値Th1以上であると判定した場合は、ステップS36へ進み、力行駆動により逆トルクを付与することを決定する。なお、閾値Th1の値は適宜変更されてもよく、例えば、閾値Th1以上である場合は満充電の状態であると判断できる値であってもよい。
ここで、SOCの算出は、開放端電圧(OCV)に基づく推定法と電流積算による算出法とが用いられる。ここでは、バッテリ35の開放端電圧を取得し、その取得値、及び開放端電圧とSOCとの対応関係を表すマップを用いて、SOCを推定するとともに、バッテリ35に流れる充放電電流を取得し、その取得値を計算処理することでSOCを算出する。なお、力行駆動によって逆トルクを付与する場合、電気残量が大きいほど逆トルクを大きくする設定としてもよい。この場合、共振域の通過時間を一層短縮でき、振動の抑制効果が高くなると考えられる。
一方、ステップS33が否定された場合は、ステップS34へ進み、逆トルクの要求トルク量に応じて機能を選択する。例えば、要求トルク量が閾値Th2以上であるか否かを判定する。ステップS34で閾値Th2以上であると判定した場合は、ステップS36へ進み、力行駆動により逆トルクを付与することを決定する。
また、ステップS34が否定された場合は、ステップS35へ進み、補機16の負荷に応じて機能を選択する。例えば、補機16の運転による負荷が閾値Th3以上であるか否かを判定する。ステップS35で閾値Th3以上であると判定した場合は、ステップS32へ進み、回生発電により逆トルクを付与することを決定する。なお、かかる場合は、電気負荷36の消費電力量が所定値未満となるが(ステップS31:NO)、車両の運転状態を示すその他のパラメータを鑑みて、回生発電を選択する。
一方、ステップS35が否定された場合は、ステップS36へ進み、力行駆動により逆トルクを付与することを決定する。上記のように、パラメータに基づいて回生発電又は力行駆動を決定した後は、図3のステップS21へ移行し、逆トルクを付与する。なお、ステップS31がNOである場合に、ステップS33〜ステップS35の判定を行わずに、ステップS36へ進み、力行駆動を選択する構成であってもよい。つまり、電気負荷36の消費電力量が所定値未満となる場合に、力行駆動によって逆トルクを付与する構成であってもよい。
ここで、力行駆動による逆トルク付与が「第1回転降下処理」に相当し、回生発電による逆トルク付与が「第2回転降下処理」に相当する。
次に、図3のステップS12で第2フラグが「1」と判定した場合は、ステップS22に進み、エンジン回転速度Neが、所定回転速度域の下限値である所定回転速度Ne2よりも小さいか否かを判定する。なお、本実施形態では、所定回転速度Ne2として共振域の低回転側の境界値Bを設定した。つまり、ステップS22では、エンジン回転速度Neが共振域の低回転側の境界値Bを通過したか否かを判定する。
ステップS22で、エンジン回転速度Neが所定回転速度Ne2よりも小さいと判定した場合、つまりエンジン回転速度Neが第3期間に移行した場合は、ステップS23に進み、第3フラグを「1」にセットするとともに、第2フラグを「0」にリセットする。続くステップS24では、ステップS21で付与した逆トルクを停止する。一方、ステップS22でエンジン回転速度Neが所定回転速度Ne2以上であると判定した場合は、そのまま本処理を終了する。
なお、ステップS18、ステップS22の処理が、エンジンの共振域を通過することを判定する「共振域判定部」に相当する。また、ステップS20、ステップS21の処理が、「回転降下制御部」に相当する。このように、本実施形態では、共振域を通過すると判定された場合に、回転電機の力行駆動及び回生発電を使い分けて、エンジン出力軸に逆トルクを付与する。
次に、ステップS11で第3フラグが「1」と判定した場合は、ステップS25に進み、図5に示すサブルーチンの処理を実行する。つまり、エンジン回転速度Neが第3期間に移行すると、エンジンの逆回転を抑制するためのクランク角停止処理が実施される。ここでは、ピストン13を膨張行程前半の位置で停止させる、つまり次の燃焼気筒のピストン13を圧縮行程前半の位置に停止させるように、エンジン回転速度に基づいた所定のタイミングで逆トルクを付与する。さらに、逆トルク付与でピストン13が所望の位置に停止しない場合に、エンジン出力軸に対して正回転側のトルク(正トルク)を付与するバックアップ処理も実行する。すなわち、クランク角停止処理では、ピストン13が圧縮行程後半の位置で停止しないように、つまり圧縮反力が生じる位置でピストン13が停止しないように制御している。
図5のステップS41では、まず、エンジン出力軸に正トルクを付与するタイミングであるか否かを判定する。このステップは、バックアップ処理を実行すると判定した場合に肯定されるものであり、初期設定ではステップS41は否定される。続くステップS42では、エンジン出力軸に逆トルクを付与するタイミングであるか否かを判定する。本実施形態では、例えば、ピストン13が圧縮TDCに位置するときのエンジン回転速度Neが所定の回転速度Ne3以下である場合に、逆トルクを付与するタイミングであると判定する。ここで、逆トルクを付与するタイミングであると判定した場合は、ステップS43に進み、エンジン出力軸に逆トルクを付与し、本処理を終了する。
所定の回転速度Ne3は、ピストンが圧縮TDCに位置するタイミングから逆トルクを付与することによって、当該ピストンが膨張行程の前半期間を過ぎるまでの間に、エンジン出力軸の回転が停止すると判定される回転速度である。なお、所定の回転速度Ne3は、所定回転速度域の下限値である所定回転速度Ne2よりも小さい値として設定される。
一方、ステップS42で、逆トルクを付与するタイミングではないと判定した場合は、ステップS44に進み、逆トルクが付与された状態であるか否かを判定する。ここで、ステップS44が否定された場合は、そのまま本処理を終了する。
一方、ステップS44で逆トルクが付与された状態であると判定した場合は、ステップS45に進み、クランク角センサ51により検出されたクランク回転位置が、設定された所定角度(例えば、ATDC70°CA)であるか否かを判定する。回転位置が所定角度であると判定した場合は、ステップS46に進み、エンジン回転速度Neが所定の回転速度Ne4以下であるか否かを判定する。一方、ステップS45が否定された場合は、そのまま本処理を終了する。
ステップS46で、エンジン回転速度Neが所定の回転速度Ne4以下であると判定した場合、つまりピストン13が膨張行程前半の位置に停止すると判定された場合は、ステップS47に進み、ステップS43で付与した逆トルクの停止を指示する。これにより、エンジン出力軸に付与された逆トルクは停止される。続いて、ステップS48に進み、第3フラグを「0」にリセットし、本処理を終了する。
なお、ステップS45及びステップS46は、「停止判定部」に相当する。所定角度における所定の回転速度Ne4は、それぞれ任意に変更可能で、ステップS43で逆トルクを付与した後、実際にピストン13が膨張行程前半までのクランク回転位置で停止するか否かを判定できる値であればよい。
一方、ステップS46で、エンジン回転速度Neが所定の回転速度Ne4より大きいと判定した場合、つまりピストン13が膨張行程前半の位置に停止しないと判定された場合は、ステップS49に進み、ピストン13が次の圧縮TDCを乗り越えるための指示をする。すなわち、バックアップ処理を実行すると判断する。そして本実施形態では、この処理が実行され、かつクランク回転位置が所定の回転角度にある(例えば、ATDC90°CA)場合に、エンジン出力軸に正トルクを付与するタイミングであると判定する(ステップS41:YES)。
ステップS41が肯定されると、ステップS50に進み、正トルクを付与し、本処理を終了する。その後、再びステップS42の処理へと進み、最終的に第3フラグが「0」にリセットされるまでクランク角停止処理が実行される。
次に、エンジン11の燃焼が停止された後、エンジン回転速度Neが完全にゼロとなるまでの回転降下期間におけるエンジン制御について、図6のタイミングチャートを用いて説明する。
まず、アイドル状態から、タイミングt11で自動停止条件が成立すると、第1フラグが「1」にセットされる。このとき、スロットルバルブ22の開度がアイドル状態の開度に比べて大きい開度となるように制御される。その後、タイミングt12でエンジン回転速度Neが所定回転速度Ne1以下となると、第2フラグが「1」にセットされると同時に、第1フラグが「0」にリセットされる。このとき、回転降下処理としてエンジン出力軸に逆トルクが付与される。そして、タイミングt13でエンジン回転速度Neが所定回転速度Ne2を下回ると、第3フラグが「1」にセットされると同時に、第2フラグが「0」にリセットされる。このとき、回転降下処理が停止され、続く第3期間では、クランク角停止処理が実行される。そして、タイミングt14でエンジン回転速度Neがゼロとなる。
続いて、エンジン回転速度Neが第3期間に属する場合のクランク角停止処理について、図7、図8のタイミングチャートを用いて説明する。これらは、逆トルクの付与後において図5のステップS46における判定が異なった場合をそれぞれ示している。図7は、ステップS46が肯定され、第3期間において逆トルクのみが付与された場合を、一方、図8は、ステップS46が否定され、第3期間において逆トルクに加え正トルクも付与された場合を示している。なお、これらの図では、各気筒の筒内圧力の変化を示している。筒内圧力は、ピストン13が圧縮TDCに近づくにつれて増加し、圧縮TDCで最大となる。また、エンジン回転速度Neの低下に伴って筒内圧力の極大値は低下していく。なお、各気筒の点火順序は、説明の便宜上、#1→#2→#3→#4としている。
図7では、エンジン回転速度Neが降下していく過程において、タイミングt21(第1気筒(#1)が圧縮TDCを迎えたタイミング)でエンジン回転速度NeがNe3以下となると、エンジン出力軸に逆トルクが付与され、これによりエンジン回転速度Neの降下速度が大きくなり、エンジン回転速度Neがゼロに近づく。そして、タイミングt22(第1気筒(#1)が所定のクランク角度位置(例えば、ATDC70°CA)を迎えたタイミング)におけるエンジン回転速度Neが所定の回転速度Ne4以下となると、逆トルクの付与が停止される。その後、タイミングt23でエンジン11の回転が停止する。このとき、第1気筒(#1)のピストン13は、膨張行程前半の位置(例えば、ATDC80°CA)に停止する。
図8では、タイミングt31(第1気筒(#1)が圧縮TDCを迎えたタイミング)でエンジン回転速度NeがNe3以下となると、逆トルクが付与される。そして、タイミングt32(第1気筒(#1)が所定のクランク角度位置(例えば、ATDC70°CA)を迎えたタイミング)におけるエンジン回転速度Neが所定の回転速度Ne4よりも大きいと、バックアップ処理が実行される。すなわち、タイミングt33で、第2気筒(#2)が次の圧縮TDCを乗り越えられるように正トルクが付与される。ここで、タイミングt33は、第1気筒(#1)が所定のクランク角度位置(例えば、ATDC90°CA)となったタイミングとする。
そして、第2気筒(#2)が圧縮TDCを迎えるタイミングt34で、再びエンジン回転速度Neが所定の回転速度Ne3以下となると、再度逆トルクが付与される。その後、タイミングt35(第2気筒(#2)が所定のクランク角度位置(例えば、ATDC70°CA)を迎えたタイミング)におけるエンジン回転速度Neが所定の回転速度Ne4以下となると、逆トルクの付与が停止される。そして、タイミングt36でエンジン11の回転が停止し、そのとき第2気筒(#2)は、膨張行程前半の位置(例えば、ATDC80°CA)で停止する。
本実施形態では、多気筒エンジンとして4気筒エンジンを示している。かかる場合、1つの気筒においてピストン13が膨張行程の前半期間の位置に停止した際には、他の気筒のピストン13は圧縮行程の後半期間の位置、すなわち圧縮反力が生じる位置には停止しない。
以上、詳述した本実施形態によれば、以下の優れた効果が得られる。
アイドリングストップ機能を備えた車両において、エンジン11の燃焼が停止した際に、スロットルバルブ22の開度をアイドル回転状態での開度よりも大きい開度とすることで、エンジンの再始動時に必要な空気量を十分に確保することができる。また、共振域においてエンジン回転速度の降下速度が大きくなるようにMG30を用いて逆トルクを付与することで、共振域を通過する時間を短縮することができる。この場合、スロットル開度が大きい状態では、共振域において振動増大が懸念されるが、共振域の通過時間が短縮されることで、振動増大を抑制できる。これにより、アイドリングストップ機能を備えた車両において、エンジン自動停止時における振動の発生を抑制しつつ、再始動時の始動性を確保することができる。
エンジン11の燃焼を停止させた時点でスロットルバルブ22をアイドル回転状態での開度よりも大きい開度とする構成とした。これにより、燃焼が停止した直後に再始動条件が成立する場合でも、十分な空気量を確保でき、再始動時の始動性が良好となる。
共振域において、MG30を用いて逆トルクを付与する構成とした。この場合、補機16に比べて大きな逆トルクをエンジン出力軸に付与することが可能となる。そのため、共振域の通過時間が一層短縮され、振動の抑制効果が高まる。
また、MG30を用いた逆トルク付与において、回生発電及び力行駆動を選択できる構成とした。ここで、力行駆動は、回生発電に比べて逆トルクが大きく、回生発電は、力行駆動に比べて燃料消費の面で優れている。これにより、運転状態に合わせて、回生発電及び力行駆動のそれぞれの利点を生かした駆動方式を選択することができる。
MG30の駆動方式の選択に関して、バッテリ35に接続される電気負荷36の電力消費量に応じて、回生発電及び力行駆動を選択できる構成とした。この場合、電気負荷36の電力消費量が所定値以上である場合は、バッテリ35に負担がかかっており、回生発電によって逆トルクを付与する。これにより、バッテリ35の電源状態を安定に保ちつつ、振動を抑制することができる。
具体的には、ブレーキペダルが踏み込まれた状態の場合に、回生発電を選択して逆トルクを付与する構成とした。ブレーキペダルを踏み込まれた状態は、ブレーキランプの点灯に伴って、バッテリ35の電力消費量が大きくなる。そのため、バッテリ35の電源状態を安定に保ちつつ、振動を抑制することができる。
MG30の駆動方式の選択に関して、さらに、バッテリ35の電気残量に基づいて回生発電及び力行駆動を選択できる構成とした。この場合、電気残量が閾値Th1以上である場合は、力行駆動によって逆トルクを付与する。バッテリ35の電気残量が大きいときは、回転電機を回生発電させることで、バッテリ35の過充電が懸念される。この点、力行駆動により逆トルクを付与することで、バッテリ35にダメージを与えることなく共振域に起因する振動を抑制できる。
第3期間において、エンジン回転速度がゼロとなる直前の圧縮上死点であると判定された場合に、MG30を用いてその圧縮上死点から逆トルクを付与する構成とした。この場合、逆トルクを付与することで、ピストン13を膨張行程前半の位置に停止させることができる。これにより、エンジンの逆回転の発生を抑制することで、それに伴う振動を低減することができる。
具体的には、エンジン11の圧縮上死点でのエンジン回転速度が所定値以下であることに基づいて、直前の圧縮上死点であることを判定する構成とした。ここで、所定値は、逆トルク付与によって、ピストン13が膨張行程前半の位置で停止すると判定される値である。そのため、ピストン13を所望の位置に停止させることができ、エンジンの逆回転に伴う振動を低減することができる。
また、逆トルクを付与した後、実際にピストン13が所望の位置に停止するか否かを判定する停止判定部を設け、所望の位置に停止すると判定した場合は、逆トルク付与を停止する構成とした。この場合、エンジンの回転が膨張行程前半の位置で停止する際には、逆トルクの付与は解除される。これにより、逆トルクに起因するエンジンの逆回転を防ぐことができる。
さらに、第3期間における停止制御にバックアップ処理を設けた。すなわち、停止判定部で、ピストン13が所望の位置に停止しないと判定された場合には、ピストン13が次の圧縮TDCを乗り越えられるように一旦正トルクを付与する。そして、その圧縮TDCに到達すると、そこから再び逆トルクを付与して、ピストンを膨張行程前半の位置に停止させる処理を行う。これにより、ピストン13をより確実に膨張行程前半の位置に停止させることができ、振動の抑制効果を高めることができる。
エンジン11の燃焼が停止された後、エンジン回転速度がゼロまで降下する際の回転降下期間において、MG30を用い、共振域では逆トルクを付与し、第3期間ではクランク停止処理による逆トルク、又は正逆トルクを付与した。これにより、共振域での振動に加え、エンジンの逆回転に伴う振動も抑制することができる。さらにこの場合、共振域の振動が逆回転の振動に及ぼす悪影響が軽減される。このように、共振域での逆トルク付与と第3期間での処理を組み合わせることにより、エンジン11の燃焼が停止してからエンジン11の回転が停止するまでの間に発生する振動を、相乗的に抑制することができる。
本発明は上記実施形態に限らず、例えば次のように実施されてもよい。
・上記実施形態では、補機装置としてMG30を用いて逆トルクを付与する構成としたが、エンジン出力軸に対して逆トルクを付与可能な補機装置であればよい。補機装置としては、例えば、ウォーターポンプ、燃料ポンプなどの補機16が挙げられる。この場合、MG30を搭載しない車両においても、車両に通常備わっている装置を用いて逆トルクを付与することができる。そのため、別途新たな装置を設ける必要がなく経済的である。
・上記実施形態では、第2期間において、所定回転速度域を共振域として逆トルクを付与した。すなわち、所定回転速度域の上限値を共振域の高回転側の境界値Aとし、所定回転速度域の下限値を共振域の低回転側の境界値Bとした。この点、所定回転速度域は共振域を含むように設定される構成であればよい。
例えば、共振域よりも高回転側の所定回転速度を上限値として、所定回転速度域を定める構成であってもよい。この場合、図3のステップS18ではエンジン回転速度Neが、共振域の境界値Aよりも高回転側に設定された所定回転速度Ne1以下であるか否かを判定し、ステップS18がYESであれば、逆トルクの付与を開始する。この構成によれば、エンジン11の燃焼が停止した後、共振域に到達する以前から逆トルクを付与することにより、共振域の境界値A付近での逆トルクによる降下速度に対するレスポンスを向上させることができる。その結果、共振域の通過時間が一層短縮され、振動の抑制効果が高まる。
また、共振域よりも高回転側の自立復帰回転速度を上限値として、所定回転速度域を定める構成であってもよい。この場合、図3のステップS18ではエンジン回転速度Neが、自立復帰回転速度に設定された所定回転速度Ne1以下であるか否かを判定し、ステップS18がYESであれば、逆トルクの付与を開始する。この構成によれば、エンジンの燃焼停止に伴いエンジン回転速度が降下し始める当初である所定回転速度Ne1を上回る状態においては、エンジン回転速度の降下速度を大きくせず、エンジンの自立復帰の可能性を見込むことができる。その結果、再始動に必要な消費電力を削減しつつ、共振域での降下速度に対するレスポンスを向上させ、振動の抑制効果を高めることができる。
その他に、共振域よりも低回転側の予め設定した所定の回転速度を下限値として、所定回転速度域を定める構成であってもよい。この場合、図3のステップS22ではエンジン回転速度Neが、予め設定された所定回転速度Ne2よりも小さいか否かを判定し、ステップS22がYESであれば、逆トルクの付与を停止する。この構成によれば、エンジン回転速度が予め設定した所定の回転速度からゼロまでの間は、エンジン回転速度の降下速度を大きくせず、クランキングによるエンジンの再始動の可能性を見込むことができる。その結果、共振域における振動を抑制しつつ、再始動の始動性を確保することができる。
さらに、上述した所定回転速度域の上限値と下限値の設定を組み合わせて、所定回転速度域を設定してもよい。例えば、所定回転速度域の上限値を共振域よりも高回転側の自立復帰回転速度とし、下限値を共振域よりも低回転側の予め設定した所定の回転速度とすることが可能である。かかる場合、燃料供給やクランキングの手段ではエンジンの再始動を行うことができない回転速度領域を早期に通過することができる。一方、エンジンの再始動が可能な領域では、エンジン回転速度の降下速度を大きくしない。その結果、共振域における振動を抑制しつつ、再始動の始動性を確保することができる。
・上記実施形態では、共振域での逆トルク付与について、バッテリ35に接続される電気負荷36の消費電力量、バッテリ35の残容量の状態、逆トルク付与に必要な要求トルク量、補機16の運転による負荷に応じて、MG30の回生発電及び力行駆動を選択する構成としたが、その他のパラメータに応じて選択する構成であってもよい。その他のパラメータとしては、MG30の回転速度などが挙げられる。
なお、MG30の駆動方式の選択にあたり、上記のパラメータ間に優先順位を設定してもよい。例えば、電気負荷36の駆動状況に基づく判定を最優先とし、続いてバッテリ35の残容量の状態、逆トルク付与に必要な要求トルク量、補機16の運転による負荷とすることができる。
・上記実施形態では、バッテリ35の残容量の状態として、バッテリ35のSOCを用いたが、これに限らず、例えばバッテリ35の端子間電圧であってもよい。
・上記実施形態では、電気負荷36の消費電力量が所定値以上であると判定された場合、具体的にはブレーキペダルが踏み込まれている場合に、回生発電により逆トルクを付与する構成とした。この点、例えば、電気負荷36の消費電力量が所定値未満であると判定された場合、具体的にはブレーキペダルが踏み込まれていない場合に、力行駆動により逆トルクを付与する構成であってもよい。この場合は、電気負荷36による消費電力量が小さくなっている状況であるため、力行駆動しても総電力量を抑えることができる。また、力行駆動を利用することで、より短時間で共振域を通過することができる。これにより、振動を効果的に抑制することができる。
・第3期間のバックアップ処理について、図8では、タイミングt31からタイミングt33の期間にかけて逆トルクを付与する構成としたが、タイミングt32の停止判定の時点で、逆トルクを停止させる構成であってもよい。
さらに、図8では、タイミングt33からタイミングt34(第2気筒(#2)が圧縮TDCを迎えたタイミング)の期間にかけて正トルクを付与する構成とした。この点、正トルク付与の期間はこれに限らず、ピストン(ここでは、第2気筒(#2))が圧縮TDCを乗り越えられるように正トルクが付与される構成であればよく、圧縮TDC以前に正トルク付与を停止する構成であってもよい。
・クランク角停止処理で付与する逆トルクの大きさは、ピストン13を膨張行程前半の位置に停止させるために必要なトルク量として予め定めておけばよい。また、エンジンの回転が停止する際のピストン13の停止位置を時々刻々予測する手段を設け、予測された停止位置に基づいてトルク量を調整するフィードバック制御を行いながら、逆トルクを付与してもよい。
・クランク角停止処理で付与する逆トルク及び正トルクの大きさは、適宜変更されてもよく、同じトルク量であっても、異なるトルク量であってもよい。また、バックアップ処理を実施した場合の1度目の逆トルクと2度目の逆トルクの大きさは、適宜変更されてもよい。例えば、2度目の逆トルクを1度目の逆トルクに比べて大きくするようにしてもよく、この構成によれば、より確実にピストンを所望の位置に停止させることができると考えられる。
・上記実施形態では、クランク角停止処理において、逆トルクを付与するタイミングとして、圧縮TDCでのエンジン回転速度Neが所定の回転速度Ne3を下回るか否かで判断した。この点、所定の回転速度Ne3を設定するクランク角度位置は圧縮TDCに限られず、それ以外のクランク角度位置におけるエンジン回転速度Neを閾値として設定し判断してもよい。なお、この場合、その閾値を設定したクランク角度位置から逆トルクの付与を開始する構成としてもよい。
・上記実施形態では、クランク角停止処理において、逆トルクを付与するタイミングの判断として、エンジン回転速度に閾値として所定の回転速度Ne3を設けたが、この方法に限られない。例えば、エンジン回転速度Neの降下推移からタイミングを判断する方法であってもよい。この場合、ECU50は、例えば圧縮TDC毎のエンジン回転速度Neから回転速度降下量ΔNeを算出し、エンジン回転速度Neがゼロを下回ると予測される圧縮TDC(i)を推定する。そして、その圧縮TDC(i)の直前の圧縮TDC(i−1)を迎えたタイミングを、逆トルク付与のタイミングとすることができる。
・エンジン回転速度がゼロとなるまでの回転降下期間における上記制御を、エンジンの自動停止の場合に限らず、運転手のイグニッションスイッチ操作による停止の場合に実施してもよい。また、アイドリングストップ機能を有しない車両における停止の場合であってもよい。