JP2017194028A - 内燃機関装置 - Google Patents
内燃機関装置 Download PDFInfo
- Publication number
- JP2017194028A JP2017194028A JP2016085407A JP2016085407A JP2017194028A JP 2017194028 A JP2017194028 A JP 2017194028A JP 2016085407 A JP2016085407 A JP 2016085407A JP 2016085407 A JP2016085407 A JP 2016085407A JP 2017194028 A JP2017194028 A JP 2017194028A
- Authority
- JP
- Japan
- Prior art keywords
- opening
- engine
- torque
- throttle
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Abstract
Description
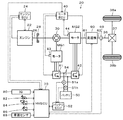
吸気バルブの開閉タイミングを変更可能な可変バルブタイミング機構を有する内燃機関と、
スロットルバルブの開度が目標開度となるように前記内燃機関を制御する制御手段と、
を備える内燃機関装置であって、
前記制御手段は、要求トルクが前記内燃機関の回転数に基づく所定トルク以上である第1条件と、前記吸気バルブの開閉タイミングの進角を要求する進角要求がなされている第2条件と、の2つの条件が共に成立しているときには、前記目標開度を全開に設定し、前記2つの条件のうち1つが成立しないときには、前記目標開度を前記要求トルクに応じた開度に設定する、
ことを要旨とする。
Claims (1)
- 吸気バルブの開閉タイミングを変更可能な可変バルブタイミング機構を有する内燃機関と、
スロットルバルブの開度が目標開度となるように前記内燃機関を制御する制御手段と、
を備える内燃機関装置であって、
前記制御手段は、要求トルクが前記内燃機関の回転数に基づく所定トルク以上である第1条件と、前記吸気バルブの開閉タイミングの進角を要求する進角要求がなされている第2条件と、の2つの条件が共に成立しているときには、前記目標開度を全開に設定し、前記2つの条件のうち1つが成立しないときには、前記目標開度を前記要求トルクに応じた開度に設定する、
内燃機関装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085407A JP6668912B2 (ja) | 2016-04-21 | 2016-04-21 | 内燃機関装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016085407A JP6668912B2 (ja) | 2016-04-21 | 2016-04-21 | 内燃機関装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017194028A true JP2017194028A (ja) | 2017-10-26 |
| JP6668912B2 JP6668912B2 (ja) | 2020-03-18 |
Family
ID=60155979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016085407A Active JP6668912B2 (ja) | 2016-04-21 | 2016-04-21 | 内燃機関装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6668912B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109855355A (zh) * | 2019-01-04 | 2019-06-07 | 广州美的华凌冰箱有限公司 | 冰箱风门控制方法、控制器、冰箱、电子设备及存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09170462A (ja) * | 1995-12-19 | 1997-06-30 | Isuzu Motors Ltd | 内燃機関の出力制御装置 |
| JP2001050052A (ja) * | 1999-08-03 | 2001-02-23 | Fuji Heavy Ind Ltd | エンジンの吸気制御装置 |
-
2016
- 2016-04-21 JP JP2016085407A patent/JP6668912B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09170462A (ja) * | 1995-12-19 | 1997-06-30 | Isuzu Motors Ltd | 内燃機関の出力制御装置 |
| JP2001050052A (ja) * | 1999-08-03 | 2001-02-23 | Fuji Heavy Ind Ltd | エンジンの吸気制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109855355A (zh) * | 2019-01-04 | 2019-06-07 | 广州美的华凌冰箱有限公司 | 冰箱风门控制方法、控制器、冰箱、电子设备及存储介质 |
| CN109855355B (zh) * | 2019-01-04 | 2021-02-19 | 广州美的华凌冰箱有限公司 | 冰箱风门控制方法、控制器、冰箱、电子设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6668912B2 (ja) | 2020-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4306719B2 (ja) | 内燃機関装置およびこれを備える動力出力装置並びにこれを搭載する車両、内燃機関装置の制御方法 | |
| JP6233328B2 (ja) | ハイブリッド自動車 | |
| JP2008190495A (ja) | 内燃機関装置およびその制御方法並びに車両 | |
| JP4876953B2 (ja) | 車両およびその制御方法 | |
| JP5459333B2 (ja) | ハイブリッド自動車の制御装置 | |
| JP2018154142A (ja) | ハイブリッド自動車 | |
| JP5904131B2 (ja) | ハイブリッド車両の制御装置およびハイブリッド車両 | |
| KR20160067745A (ko) | 자동차 | |
| JP4241674B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2011219019A (ja) | 自動車および内燃機関の運転停止時の制御方法 | |
| JP5991145B2 (ja) | ハイブリッド自動車 | |
| JP6668912B2 (ja) | 内燃機関装置 | |
| JP2010105626A (ja) | 車両およびその制御方法 | |
| JP2008126904A (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP4222365B2 (ja) | 内燃機関装置およびその制御方法 | |
| JP2009274628A (ja) | ハイブリッド車およびその制御方法 | |
| JP6277972B2 (ja) | ハイブリッド自動車 | |
| JP6020281B2 (ja) | 車両 | |
| JP2020001487A (ja) | ハイブリッド自動車 | |
| JP5040833B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2012236548A (ja) | ハイブリッド車 | |
| JP2008195134A (ja) | 動力出力装置およびその制御方法並びに車両 | |
| JP2018039299A (ja) | ハイブリッド自動車 | |
| JP2008138606A (ja) | 内燃機関装置およびこれを備える動力出力装置並びにこれを搭載する車両、内燃機関装置の制御方法 | |
| JP2016075156A (ja) | ハイブリッド車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20190417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190723 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190919 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200210 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6668912 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |