JP2017190230A - コンベア装置、および、自動倉庫 - Google Patents
コンベア装置、および、自動倉庫 Download PDFInfo
- Publication number
- JP2017190230A JP2017190230A JP2016081353A JP2016081353A JP2017190230A JP 2017190230 A JP2017190230 A JP 2017190230A JP 2016081353 A JP2016081353 A JP 2016081353A JP 2016081353 A JP2016081353 A JP 2016081353A JP 2017190230 A JP2017190230 A JP 2017190230A
- Authority
- JP
- Japan
- Prior art keywords
- conveyor
- motor
- stopper
- arm
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Special Conveying (AREA)
Abstract
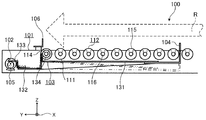
【解決手段】荷物300を搬送するコンベア101と、コンベア101の搬送方向において、荷物の搬送経路Rの端縁よりも外側に配置されるモータ102と、モータ102の回転軸に接続され、搬送経路Rの下方を搬送方向に沿って延びるアーム103と、アーム103に接続され、モータ102の回転に基づき搬送経路Rの下方から上方に向かって突出し下方に向かって退避するストッパ104とを備えるコンベア装置100。
【選択図】図3
Description
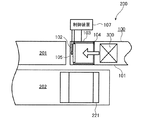
101 コンベア
102 モータ
103 アーム
104 ストッパ
105 駆動機構
106 検知手段
107 制御装置
111 ローラーモータ
112 ローラ
113 伝達手段
114 フリーローラ
115 回転ローラ
116 ローラ軸
120 第二コンベア
131 腕部
132 接続部
133 係合部
134 支持軸体
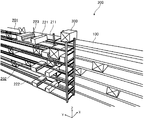
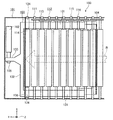
200 自動倉庫
201 棚
202 搬送装置
211 棚板
221 走行車
222 レール
223 移載装置
300 荷物
Claims (5)
- 荷物を搬送するコンベアと、
前記コンベアの搬送方向において、荷物の搬送経路の端縁よりも外側に配置されるモータと、
前記モータの回転軸に接続され、前記搬送経路の下方を前記搬送方向に沿って延びるアームと、
前記アームに接続され、前記モータの回転に基づき前記搬送経路の下方から上方に向かって突出し下方に向かって退避するストッパと
を備えるコンベア装置。 - 前記アームは、水平面内において前記搬送方向と垂直に配置される支持軸体により前記コンベアに揺動可能に軸支され、
前記支持軸体は、前記モータと前記ストッパとの間に配置される
請求項1に記載のコンベア装置。 - 前記支持軸体は、前記コンベアの荷物を搬送するためのローラのローラ軸に軸支される
請求項1または2に記載のコンベア装置。 - 前記モータと前記コンベアを制御する制御装置と、
前記コンベアにより搬送されている荷物が退避状態の前記ストッパを通過したことを検知する検知手段とをさらに備え、
前記制御装置は、荷物が退避状態の前記ストッパを通過したことを前記検知手段が検知した場合、前記モータを制御して前記ストッパを突出させ、前記コンベアを逆走させる
請求項1〜3のいずれか一項に記載のコンベア装置。 - 複数の荷物を保管可能な棚と、
前記棚の側方において前記棚に沿って荷物を搬送し、前記棚との間で荷物を移載することができる搬送装置と、
前記搬送装置に移載することが可能な位置に荷物を搬送するコンベア装置とを備え、
前記コンベア装置は、
荷物を搬送するコンベアと、
前記コンベアの搬送方向において、荷物の搬送経路の端縁よりも外側に配置されるモータと、
前記モータの回転軸に接続され、前記搬送経路の下方を前記搬送方向に沿って延びるアームと、
前記アームに接続され、前記モータの回転に基づき前記搬送経路の下方から上方に向かって突出し下方に向かって退避するストッパとを備える
自動倉庫。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081353A JP6380451B2 (ja) | 2016-04-14 | 2016-04-14 | コンベア装置、および、自動倉庫 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016081353A JP6380451B2 (ja) | 2016-04-14 | 2016-04-14 | コンベア装置、および、自動倉庫 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017190230A true JP2017190230A (ja) | 2017-10-19 |
| JP6380451B2 JP6380451B2 (ja) | 2018-08-29 |
Family
ID=60084570
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016081353A Active JP6380451B2 (ja) | 2016-04-14 | 2016-04-14 | コンベア装置、および、自動倉庫 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6380451B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108529118A (zh) * | 2018-05-24 | 2018-09-14 | 贵州恒晋助力智能技术有限公司 | 一种多方向自由移动货物存取装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5483780U (ja) * | 1977-11-24 | 1979-06-13 | ||
| JPH01162629A (ja) * | 1987-12-15 | 1989-06-27 | Daifuku Co Ltd | 荷姿検出方法 |
| JPH0654634U (ja) * | 1992-12-28 | 1994-07-26 | 村田機械株式会社 | パッケージ搬送用トレイ |
| JP2003227247A (ja) * | 2002-02-01 | 2003-08-15 | Kito Corp | 納骨箱自動搬送装置 |
-
2016
- 2016-04-14 JP JP2016081353A patent/JP6380451B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5483780U (ja) * | 1977-11-24 | 1979-06-13 | ||
| JPH01162629A (ja) * | 1987-12-15 | 1989-06-27 | Daifuku Co Ltd | 荷姿検出方法 |
| JPH0654634U (ja) * | 1992-12-28 | 1994-07-26 | 村田機械株式会社 | パッケージ搬送用トレイ |
| JP2003227247A (ja) * | 2002-02-01 | 2003-08-15 | Kito Corp | 納骨箱自動搬送装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108529118A (zh) * | 2018-05-24 | 2018-09-14 | 贵州恒晋助力智能技术有限公司 | 一种多方向自由移动货物存取装置 |
| CN108529118B (zh) * | 2018-05-24 | 2024-01-26 | 贵州恒晋助力智能技术有限公司 | 一种多方向自由移动货物存取装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6380451B2 (ja) | 2018-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10793378B2 (en) | Transfer apparatus and article taking-out method | |
| JP6032418B2 (ja) | リニア搬送装置 | |
| JP6532232B2 (ja) | 物品移送装置および物品移送方法 | |
| KR20160149993A (ko) | 반송 설비 | |
| JP6060673B2 (ja) | 物品振り分け装置 | |
| JP6380451B2 (ja) | コンベア装置、および、自動倉庫 | |
| JP2009039743A (ja) | パネル排出装置 | |
| JP2015030617A (ja) | 仕分けシステム及び荷物投入方法 | |
| WO2018193710A1 (ja) | バッファ装置 | |
| KR102526007B1 (ko) | 반송장치 | |
| JP6168298B2 (ja) | 物品受け渡し装置 | |
| JP5342894B2 (ja) | 荷搬送棚 | |
| JP6056707B2 (ja) | 物品移載装置及び搬送設備 | |
| JP2021104885A (ja) | 搬送装置 | |
| JP6191824B2 (ja) | 搬送装置 | |
| JP2007216941A (ja) | 搬送装置 | |
| JP6003845B2 (ja) | 搬送装置 | |
| JP2981608B1 (ja) | ローラコンベア | |
| JP6705350B2 (ja) | 荷積込装置 | |
| CN216154646U (zh) | 分流组件以及货物仓储系统 | |
| CN113167633B (zh) | 物品搬运设备 | |
| JP5332191B2 (ja) | 移載装置 | |
| JP2019189392A (ja) | 物品搬送車 | |
| JP3622113B2 (ja) | 自動倉庫 | |
| JP6673031B2 (ja) | 搬送車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180605 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180703 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180716 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6380451 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |