JP2017173013A - 回転角度検出装置 - Google Patents
回転角度検出装置 Download PDFInfo
- Publication number
- JP2017173013A JP2017173013A JP2016056557A JP2016056557A JP2017173013A JP 2017173013 A JP2017173013 A JP 2017173013A JP 2016056557 A JP2016056557 A JP 2016056557A JP 2016056557 A JP2016056557 A JP 2016056557A JP 2017173013 A JP2017173013 A JP 2017173013A
- Authority
- JP
- Japan
- Prior art keywords
- excitation
- resolver
- signal
- switching
- pwm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005284 excitation Effects 0.000 claims abstract description 234
- 238000001514 detection method Methods 0.000 claims abstract description 54
- 238000004804 winding Methods 0.000 claims description 57
- 230000006698 induction Effects 0.000 claims description 12
- 238000000034 method Methods 0.000 description 20
- 238000010586 diagram Methods 0.000 description 14
- 230000004907 flux Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000010248 power generation Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000010791 quenching Methods 0.000 description 1
- 230000000171 quenching effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images








Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
Description
実施の形態1.
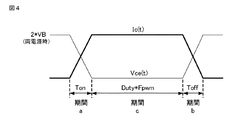
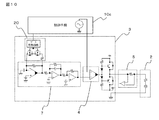
図1はこの発明の実施の形態1における回転角度検出装置の概略構成を示すブロック図、図2はこの発明の実施の形態1における回転角度検出装置の回路構成の一例を示す回路図、図3はこの発明の実施の形態1における回転角度検出装置の制御手段の動作を説明するフロー図、図4はこの発明の実施の形態1における回転角度検出装置のPWM駆動時のスイッチング波形を説明する説明図である。
レゾルバ2は、励磁巻線および誘起巻線を有している。レゾルバ2の励磁巻線に印加される励磁信号による磁場が、回転電機(図示せず)の回転軸の回転によって周波数変調されて、レゾルバ2の誘起巻線に誘起信号として誘起される。従って、この励磁信号と誘起信号とを比較することにより、回転電機の回転角度および回転速度を検出することができる。
また、制御手段10は、PWM駆動手段4を用いてレゾルバに励磁電流を印加した場合の損失マップをあらかじめ用意しておき、演算して求めたトランジスタの損失Ptrと照らし合わせて、トランジスタの損失Ptrが、PWM駆動手段4を用いた場合の損失よりも大きければ、切り替え手段6に切り替え信号を送信し、PWM駆動手段4から出力されたPWM信号の励磁パルスを用いるようにする。
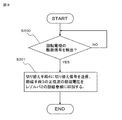
ステップS100において、レゾルバ2の励磁巻線に励磁手段3から出力された正弦波の励磁信号が印加されている状態で、制御手段10は、励磁電流検出手段5が検出した励磁電流値ILを読み込み、ステップS101へと進む。
ステップS101において、制御手段10は、励磁手段3に出力している正弦波の励磁信号Vin(θ)と励磁電流検出手段5で検出した励磁電流値ILをもとに、励磁手段3のトランジスタの損失Ptrを演算して見積もり、ステップS102へと進む。
ステップS103において、制御手段10は、切り替え手段6に切り替え信号(図2ではHi)を送信し、切り替え手段6は、レゾルバ2への電流経路として励磁手段3内のPWM駆動手段4を選択し、励磁パルスをレゾルバ2の励磁巻線に印加する。
同様に、スイッチングOFF期間における損失PtrOFFは、図4の期間bにおける電圧変化2VBと電流変化Icおよび、OFF過渡時間Toffを用いて、PtrOFF=VB×Ic×Toff/3で表せる。
また、トランジスタがON期間中の損失PONは、図4の期間cにおけるトランジスタのコレクタエミッタ間電圧Vceおよび励磁電流IcならびにPWMキャリア周波数Fpwm、PWM信号の励磁パルスのデューティ比Dutyを用いて、PON=Vce×Ic×Duty×Fpwmで表せる。
従って、PWM駆動1周期分の損失Ptr_1cycは上記の損失の合計となり、Ptr_1cyc=PtrON+PtrOFF+PONで見積もることができる。
図5はこの発明の実施の形態2における回転角度検出装置の概略構成を示すブロック図、図6はこの発明の実施の形態2における回転角度検出装置の制御手段の動作を説明するフロー図である。
上記実施の形態1では、励磁手段3によってレゾルバ2の励磁巻線に正弦波の励磁電圧が印加されているとき、制御手段10は、励磁手段3をPWM駆動することによって損失が低減される場合は、切り替え手段6に切り替え信号を送信して、PWM駆動手段4によって励磁パルスをレゾルバ2の励磁巻線に印加する場合について説明したが、実施の形態2では、励磁手段3内のPWM駆動手段4によって、レゾルバ2の励磁巻線に励磁パルスが印加されているとき、図5に示す制御手段10aは、PWM信号の励磁パルスのデューティ比(Duty)が所定の設定値に到達した場合は、励磁手段3をPWM駆動手段4による励磁パルス印加から正弦波の励磁電圧印加へ切り替える場合について説明する。
図5において、制御手段10aは、PWM駆動手段4が出力する励磁パルスを読み込んでいる。なお、他の部分の構成については上記実施の形態1と同様であるため説明を省略する。
ステップS200において、レゾルバ2の励磁巻線にPWM駆動手段4が出力する励磁パルスが印加されている状態で、制御手段10aは、PWM駆動手段4が出力するPWM信号の励磁パルスのパルス幅(時間)を読み込み、PWM信号の励磁パルスのデューティ比(ON Duty)を算出し、ステップS201へと進む。
さらに、デューティ比が最大値や最小値に達していない範囲の場合は、PWM駆動によってレゾルバ2の励磁巻線を励磁するので、励磁手段3の損失を低減することができ、回路素子のサイズダウンや基板放熱面積の削減が可能となり、励磁手段3の小型化も可能となる。
図7はこの発明の実施の形態3における回転角度検出装置の概略構成を示すブロック図、図8はこの発明の実施の形態3における回転角度検出装置の制御手段の動作を説明するフロー図である。
上記実施の形態2では、励磁手段3内のPWM駆動手段4によって、レゾルバ2の励磁巻線に励磁パルスが印加されているとき、制御手段10aは、PWM信号の励磁パルスのデューティ比(Duty)が所定の設定値に到達した場合は、励磁手段3をPWM駆動手段4による励磁パルス印加から正弦波の励磁電圧印加へ切り替える場合について説明したが、実施の形態3では、励磁手段3内のPWM駆動手段4によって、レゾルバ2の励磁巻線に励磁パルスが印加されているとき、図7に示す制御手段10bは、モータジェネレータなどの回転電機30の駆動信号を検出した場合は、励磁手段3をPWM駆動手段4による励磁パルス印加から正弦波の励磁電圧印加へ切り替える場合について説明する。
図7において、制御手段10bは、モータジェネレータなどの回転電機30の駆動信号を検出入力している。なお、他の部分の構成については上記実施の形態2と同様であるため説明を省略する。
ステップS300において、レゾルバ2の励磁巻線にPWM駆動手段4が出力する励磁パルスが印加されている状態で、制御手段10bは、回転電機30の駆動信号を検出した場合(YES)はステップS301へと進み、そうでない場合(NO)は回転電機30の駆動信号が検出されるまでステップS300を繰り返す。なお、回転電機30の駆動信号としては、例えば、回転電機30の発電あるいは駆動の動作を制御するマイコンまたは制御用集積回路(ASIC:Application Specific Integrated Circuit)などが出力するHiまたはLoの論理信号が考えられる。
ステップS301において、制御手段10bは、切り替え手段6に切り替え信号(図2ではLo)を送信し、切り替え手段6は、レゾルバ2への電流経路を励磁手段3内のPWM駆動手段4から出力の励磁パルスの印加から、励磁手段3から出力の正弦波の励磁電圧の印加に切り替える。
また、回転電機30の駆動時には、正弦波の励磁電圧をレゾルバ2の励磁巻線に印加するので波形歪みを抑制し、精度の高い回転角度検出が可能となる。
図9はこの発明の実施の形態4における回転角度検出装置の概略構成を示すブロック図、図10はこの発明の実施の形態4における回転角度検出装置の回路構成の一例を示す回路図、図11はこの発明の実施の形態4における回転角度検出装置の制御手段の動作を説明するフロー図である。
上記実施の形態2では、励磁手段3内のPWM駆動手段4によって、レゾルバ2の励磁巻線に励磁パルスが印加されているとき、制御手段10aは、PWM信号の励磁パルスのデューティ比(Duty)が所定の設定値に到達した場合は、励磁手段3をPWM駆動手段4による励磁パルス印加から正弦波の励磁電圧印加へ切り替える場合について説明したが、実施の形態4では、励磁手段3内のPWM駆動手段4によって、レゾルバ2の励磁巻線に励磁パルスが印加されているとき、図9に示す制御手段10cは、PWM信号の励磁パルスのデューティ比(Duty)が所定の設定値に到達した場合は、キャリア周波数変更手段20によってPWM駆動手段4のキャリア周波数を変更し、励磁手段3の損失低減と、回転角度検出精度への影響を最小限に抑える方法について説明する。
ステップS400において、レゾルバ2の励磁巻線にPWM駆動手段4が出力する励磁パルスが印加されている状態で、制御手段10cは、PWM駆動手段4が出力するPWM信号の励磁パルスのパルス幅(時間)を読み込み、PWM信号の励磁パルスのデューティ比(ON Duty)を算出し、ステップ401へと進む。
なお、高周波側のキャリア周波数としては、例えば、励磁手段3を構成するトランジスタのスルーレートを考慮した最大の周波数とする方法などが考えられる。また、低周波側(変更前)のキャリア周波数としては、変更後の高周波側の周波数を偶数で分周する方法が考えられる。偶数で分周することで、キャリア周波数の変更前後でのデューティ比の不連続性を回避できるので、キャリア周波数の変更時における励磁波形の歪みが表れない利点を有する。
Claims (5)
- 励磁巻線に印加された励磁信号により形成される磁場が回転電機の回転により周波数変調されて誘起巻線に誘起信号を発生させるレゾルバと、前記レゾルバの励磁巻線に印加するための正弦波の励磁電圧を出力する励磁手段と、前記レゾルバの励磁巻線に印加するためのPWM信号の励磁パルスを出力するPWM駆動手段と、前記励磁手段により出力される正弦波の励磁電圧と前記PWM駆動手段により出力されるPWM信号の励磁パルスとを切り替えて前記レゾルバの励磁巻線に印加する切り替え手段と、損失低減が可能で回転角度検出精度への影響を抑制可能な状態になる場合に前記切り替え手段に対して切り替え信号を与える制御手段を備えたことを特徴とする回転角度検出装置。
- 前記レゾルバの励磁巻線に前記励磁手段から出力された正弦波の励磁電圧が印加されているとき、前記制御手段は、前記レゾルバの励磁巻線に流れる励磁電流から求めた損失見積もりが、予め保有している前記PWM駆動手段からの出力により励磁されているときの損失よりも大きい場合に、前記切り替え手段に対して前記PWM駆動手段から出力のPWM信号の励磁パルスに切り替える信号を与えることを特徴とする請求項1に記載の回転角度検出装置。
- 前記レゾルバの励磁巻線に前記PWM駆動手段から出力されたPWM信号の励磁パルスが印加されているとき、前記制御手段は、前記PWM駆動手段から出力される励磁パルスのデューティ比が予め設定されている最大値以上または最小値以下になった場合に、前記切り替え手段に対して前記励磁手段から出力の正弦波の励磁電圧に切り替える信号を与えることを特徴とする請求項1または2に記載の回転角度検出装置。
- 前記レゾルバの励磁巻線に前記PWM駆動手段から出力されたPWM信号の励磁パルスが印加されているとき、前記制御手段は、前記回転電機に対する駆動信号を検出した場合に、前記切り替え手段に対して前記励磁手段から出力の正弦波の励磁電圧に切り替える信号を与えることを特徴とする請求項1から3のいずれか一項に記載の回転角度検出装置。
- 励磁巻線に印加された励磁信号により形成される磁場が回転電機の回転により周波数変調されて誘起巻線に誘起信号を発生させるレゾルバと、前記レゾルバの励磁巻線に印加するためのPWM信号の励磁パルスを出力するPWM駆動手段と、前記PWM駆動手段のキャリア周波数を低周波側または高周波側に変更するキャリア周波数変更手段と、前記PWM駆動手段から出力される励磁パルスのデューティ比が予め設定されている最大値以上または最小値以下になった場合に前記キャリア周波数変更手段によりキャリア周波数を低周波側から高周波側に変更する制御手段を備えたことを特徴とする回転角度検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016056557A JP6109370B1 (ja) | 2016-03-22 | 2016-03-22 | 回転角度検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016056557A JP6109370B1 (ja) | 2016-03-22 | 2016-03-22 | 回転角度検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6109370B1 JP6109370B1 (ja) | 2017-04-05 |
| JP2017173013A true JP2017173013A (ja) | 2017-09-28 |
Family
ID=58666442
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016056557A Active JP6109370B1 (ja) | 2016-03-22 | 2016-03-22 | 回転角度検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6109370B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020120035A1 (de) * | 2018-12-10 | 2020-06-18 | Robert Bosch Gmbh | Vorrichtung zur anregung eines resolvers und resolveranordnung |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013125083A1 (ja) * | 2012-02-24 | 2013-08-29 | アイシン・エィ・ダブリュ株式会社 | レゾルバ励磁装置 |
| JP2015125127A (ja) * | 2013-12-27 | 2015-07-06 | 日立オートモティブシステムズ株式会社 | 回転角検出装置 |
| JP2016070719A (ja) * | 2014-09-29 | 2016-05-09 | 三菱電機株式会社 | レゾルバ |
| JP2016118449A (ja) * | 2014-12-19 | 2016-06-30 | パナソニックIpマネジメント株式会社 | 位置検出装置 |
-
2016
- 2016-03-22 JP JP2016056557A patent/JP6109370B1/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013125083A1 (ja) * | 2012-02-24 | 2013-08-29 | アイシン・エィ・ダブリュ株式会社 | レゾルバ励磁装置 |
| JP2015125127A (ja) * | 2013-12-27 | 2015-07-06 | 日立オートモティブシステムズ株式会社 | 回転角検出装置 |
| JP2016070719A (ja) * | 2014-09-29 | 2016-05-09 | 三菱電機株式会社 | レゾルバ |
| JP2016118449A (ja) * | 2014-12-19 | 2016-06-30 | パナソニックIpマネジメント株式会社 | 位置検出装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020120035A1 (de) * | 2018-12-10 | 2020-06-18 | Robert Bosch Gmbh | Vorrichtung zur anregung eines resolvers und resolveranordnung |
| CN113167600A (zh) * | 2018-12-10 | 2021-07-23 | 罗伯特·博世有限公司 | 用于激励旋转变压器的设备和旋转变压器组件 |
| US11994413B2 (en) | 2018-12-10 | 2024-05-28 | Robert Bosch Gmbh | Device for exciting a resolver, and resolver arrangement |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6109370B1 (ja) | 2017-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018098824A (ja) | 永久磁石同期電動機の制御装置、および回転子の初期位置推定のための制御方法 | |
| JP2014187864A (ja) | 磁石磁束量推定装置、異常減磁判定装置、同期電動機駆動装置および電動車両 | |
| JP2007259675A (ja) | 電力変換器システム | |
| CN106026820B (zh) | 自动调谐电机参数方法和系统 | |
| JP2008278595A (ja) | 永久磁石形同期電動機の制御装置 | |
| JP6179389B2 (ja) | 電動機の制御装置 | |
| CN103001568A (zh) | 马达控制装置 | |
| JP2019221075A (ja) | モータ制御装置及び画像形成装置 | |
| JP7152875B2 (ja) | モータ制御装置及び画像形成装置 | |
| KR101907368B1 (ko) | 전력 제어 방법 및 전력 제어 장치 | |
| JP6109370B1 (ja) | 回転角度検出装置 | |
| JP2018098856A (ja) | 永久磁石同期電動機の制御装置、画像形成装置、および制御方法 | |
| JP2013141345A (ja) | モータ制御装置及び空気調和機 | |
| CN104682824A (zh) | 用于控制感应电动机的设备 | |
| JP6183194B2 (ja) | モータ制御装置 | |
| JP2012182874A (ja) | モータ制御装置 | |
| JP2015233372A (ja) | 多巻線交流モータの制御方法 | |
| JP6458684B2 (ja) | 電力制御方法、及び、電力制御装置 | |
| JP4937766B2 (ja) | 電圧型インバータの制御装置 | |
| JP7152132B2 (ja) | モータの制御方法、及び、モータ制御装置 | |
| JP6173612B2 (ja) | 回転角度検出装置および回転角度検出方法 | |
| JP2010063210A (ja) | 交流モータ用電流検出回路及びリニアモータ用ドライブ回路 | |
| JP2014233185A (ja) | スイッチトリラクタンスモータの駆動制御方法及びスイッチトリラクタンスモータの駆動制御装置 | |
| JP5809461B2 (ja) | 直流モータ回転制御装置 | |
| JP2010273476A (ja) | 同期機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170307 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6109370 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |