JP2017159780A - 台車 - Google Patents
台車 Download PDFInfo
- Publication number
- JP2017159780A JP2017159780A JP2016045597A JP2016045597A JP2017159780A JP 2017159780 A JP2017159780 A JP 2017159780A JP 2016045597 A JP2016045597 A JP 2016045597A JP 2016045597 A JP2016045597 A JP 2016045597A JP 2017159780 A JP2017159780 A JP 2017159780A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- driving force
- handle
- state
- cart
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Handcart (AREA)
Abstract
Description
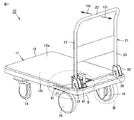
図1は、この発明の実施の形態1における台車を示す斜視図である。図1を参照して、本実施の形態における台車10は、ユーザにより与えられる駆動力を検出し、その検出結果に基づいて駆動力をアシストする機能(以下、単に「アシスト機能」ともいう)を備える。
図7は、この発明の実施の形態2における台車を示す斜視図である。図8および図9は、図7中の台車におけるアシスト機能を説明するための説明図である。本実施の形態における台車は、実施の形態1における台車10と比較して、基本的には同様の構造を備える。以下、重複する構造については、その説明を繰り返さない。
図10から図13は、この発明の実施の形態3において、台車のアシスト機能を説明するための説明図である。本実施の形態における台車は、実施の形態1における台車10と比較して、基本的には同様の構造を備える。以下、重複する構造については、その説明を繰り返さない。
図14は、この発明の実施の形態4における台車を示す斜視図である。図15および図16は、図14中の台車におけるアシスト機能を説明するための説明図である。本実施の形態における台車は、実施の形態1における台車10と比較して、基本的には同様の構造を備える。以下、重複する構造については、その説明を繰り返さない。
この発明に従った台車は、ユーザにより与えられる駆動力を検出し、その検出結果に基づいて駆動力をアシストする機能を備える台車である。台車は、走行可能な台車本体部と、台車本体部に設けられ、台車本体部から立ち上がる第1状態と、台車本体部に対して折り畳まれる第2状態との間で動作するハンドル部と、台車本体部に設けられ、駆動力を検出する駆動力検出部と、ユーザによりハンドル部に与えられた駆動力を駆動力検出部に向けて伝達する駆動力伝達部と、ハンドル部に設けられ、ハンドル部を第1状態にロックするロック機構部とを備える。ロック機構部は、ユーザに操作されることによってハンドル部のロックを解除し、ハンドル部を第1状態から第2状態に動作可能とする操作部を含む。台車は、ハンドル部を駆動力伝達部に連結し、ユーザによる操作部の操作時に、ハンドル部および駆動力伝達部の連結を解除するように動作する連結機構部を備える。
Claims (5)
- ユーザにより与えられる駆動力を検出し、その検出結果に基づいて駆動力をアシストする機能を備える台車であって、
走行可能な台車本体部と、
前記台車本体部に設けられ、前記台車本体部から立ち上がる第1状態と、前記台車本体部に対して折り畳まれる第2状態との間で動作するハンドル部と、
前記台車本体部に設けられ、駆動力を検出する駆動力検出部と、
ユーザにより前記ハンドル部に与えられた駆動力を前記駆動力検出部に向けて伝達する駆動力伝達部と、
前記ハンドル部に設けられ、前記ハンドル部を前記第1状態にロックするロック機構部とを備え、
前記ロック機構部は、ユーザに操作されることによって前記ハンドル部のロックを解除し、前記ハンドル部を前記第1状態から前記第2状態に動作可能とする操作部を含み、さらに、
前記ハンドル部を前記駆動力伝達部に連結し、ユーザによる前記操作部の操作時に、前記ハンドル部および前記駆動力伝達部の連結を解除するように動作する連結機構部を備える、台車。 - 前記連結機構部は、ユーザによる前記操作部の操作に伴って、単一の回転軸を中心に回転動作する回転押圧部材と、前記ハンドル部に設けられ、前記駆動力伝達部に接続される第3状態と、前記駆動力伝達部から離間する第4状態との間でスライドするスライドピンとを含み、
前記スライドピンは、前記回転押圧部材に押圧されることによって、前記第3状態に保持され、ユーザによる前記操作部の操作時、前記回転押圧部材が前記回転軸を中心に回転するのに伴って、前記第3状態から前記第4状態までスライドする、請求項1に記載の台車。 - 前記操作部は、前記回転押圧部材が前記回転軸からその半径方向に離れた位置で当接するバーであり、
ユーザにより前記バーが押し下げられることによって、前記回転押圧部材が前記回転軸を中心に回転する、請求項2に記載の台車。 - 前記連結機構部は、前記スライドピンに対して、前記スライドピンを前記第3状態から前記第4状態に向けてスライドさせる方向の弾性力を付与する弾性部材をさらに含み、
前記回転押圧部材は、前記弾性部材の弾性力に抗しつつ、前記スライドピンを前記第3状態に保持するように押圧する、請求項2または3に記載の台車。 - 前記駆動力伝達部は、前記連結機構部により前記ハンドル部に連結される第1アーム部と、前記第1アーム部から折れ曲がり、前記駆動力検出部に向けて延びる第2アーム部とを含み、前記第1アーム部および前記第2アーム部の折れ曲がり部位を中心に回動可能に支持されるL字型アームであり、
前記L字型アームは、ユーザにより前記ハンドル部に与えられた駆動力を前記連結機構部を介して受けることによって、前記折れ曲がり部位を中心に回動し、
前記駆動力検出部は、前記L字型アームの回動運動に伴う前記第2アーム部の変位を検知することによって、駆動力の方向および大きさを検出する、請求項1から4のいずれか1項に記載の台車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016045597A JP6552438B2 (ja) | 2016-03-09 | 2016-03-09 | 台車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016045597A JP6552438B2 (ja) | 2016-03-09 | 2016-03-09 | 台車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017159780A true JP2017159780A (ja) | 2017-09-14 |
| JP6552438B2 JP6552438B2 (ja) | 2019-07-31 |
Family
ID=59854637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016045597A Active JP6552438B2 (ja) | 2016-03-09 | 2016-03-09 | 台車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6552438B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019073041A (ja) * | 2017-10-12 | 2019-05-16 | 株式会社竹中工務店 | 搬送装置 |
| JP2019097641A (ja) * | 2017-11-29 | 2019-06-24 | ホシザキ株式会社 | 配膳車 |
| KR20220040973A (ko) * | 2020-09-24 | 2022-03-31 | 주식회사 디카트 | 무선제어 및 근력증강 기능을 구비한 전동웨건 |
-
2016
- 2016-03-09 JP JP2016045597A patent/JP6552438B2/ja active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019073041A (ja) * | 2017-10-12 | 2019-05-16 | 株式会社竹中工務店 | 搬送装置 |
| JP7004539B2 (ja) | 2017-10-12 | 2022-01-21 | 株式会社竹中工務店 | 搬送装置 |
| JP2019097641A (ja) * | 2017-11-29 | 2019-06-24 | ホシザキ株式会社 | 配膳車 |
| KR20220040973A (ko) * | 2020-09-24 | 2022-03-31 | 주식회사 디카트 | 무선제어 및 근력증강 기능을 구비한 전동웨건 |
| KR102481629B1 (ko) | 2020-09-24 | 2022-12-28 | 주식회사 디카트 | 무선제어 및 근력증강 기능을 구비한 전동웨건 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6552438B2 (ja) | 2019-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5719606B2 (ja) | 電動アシスト台車及び台車の電動アシストユニット | |
| TWI796212B (zh) | 兒童載具 | |
| JP6552438B2 (ja) | 台車 | |
| JP4599907B2 (ja) | 走行装置 | |
| JP6672106B2 (ja) | 台車 | |
| JP2006290319A (ja) | 電動アシスト手押し台車 | |
| CN107635850B (zh) | 婴儿车 | |
| CN109927811B (zh) | 电动移动体 | |
| JP6155066B2 (ja) | 台車の駆動アシストユニット | |
| WO2014157308A1 (ja) | 台車の駆動アシストユニット | |
| JP6023621B2 (ja) | 台車の駆動アシストユニット | |
| JP2018203092A (ja) | 手押し車および手押し車に用いる前輪持ち上げユニット | |
| CN106080732B (zh) | 一种旅游用童车 | |
| JP2012061886A (ja) | 電動アシスト台車 | |
| JPH1029538A (ja) | 駆動力補助手段を具えた台車 | |
| JP2018161995A (ja) | サスペンション装置 | |
| CN115123432A (zh) | 一种卡丁车及其车架、控制方法 | |
| JP6746921B2 (ja) | 歩行補助器 | |
| JP7205054B2 (ja) | 電動移動体 | |
| CN107531263B (zh) | 手推车用的带锁定功能的万向节及婴儿车 | |
| JP3640603B2 (ja) | リフトトラック | |
| JP6978027B1 (ja) | 折り畳み車両の車体構造、駆動装置および折り畳み車両 | |
| JP2013193597A (ja) | 車両用駆動操舵装置 | |
| CN218617006U (zh) | 卡丁车车架及其开关结构 | |
| JP4783841B2 (ja) | 手押し車の駐車ブレーキ機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180920 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190620 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190702 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6552438 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |