JP2017125860A - 電子部品の搬送装置 - Google Patents
電子部品の搬送装置 Download PDFInfo
- Publication number
- JP2017125860A JP2017125860A JP2017052963A JP2017052963A JP2017125860A JP 2017125860 A JP2017125860 A JP 2017125860A JP 2017052963 A JP2017052963 A JP 2017052963A JP 2017052963 A JP2017052963 A JP 2017052963A JP 2017125860 A JP2017125860 A JP 2017125860A
- Authority
- JP
- Japan
- Prior art keywords
- electronic component
- plate
- shuttle
- electronic components
- shuttle plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Testing Of Individual Semiconductor Devices (AREA)
Abstract
Description
この特許文献1に記載されたICデバイスの搬送装置では、1個あるいは複数個のICデバイスをこの一対のスライドガイドプレートの間に挟んで固定するように構成されているために、搬送時の振動などでスライドガイドプレートの締め付けねじが緩むとスライドガイドプレートが移動してしまい、ICデバイスが固定位置から移動し、あるいは外れ、搬送に不具合が生じる可能性がある。また、1個あるいは複数個のICデバイスをこの一対のスライドガイドプレートの間に挟んで固定する際に、ICデバイスがシャトルプレートの表面に対して一対のスライドガイドプレートの間に傾いて固定されることがある。この場合には、傾いたままの状態で次の測定部に搬送されることになり、測定部に傾いたままセットされる可能性がある。この場合、正常な測定結果が得られなくなることは容易に推考できる。
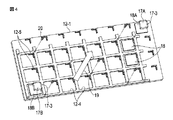
複数の位置決め孔を持ち、複数の底面が矩形の直方体形状の電子部品をその上面に載置して搬送するシャトルプレートと、
前記複数の位置決め孔の所定の位置にねじ止めされる位置決めボルトにより前記シャトルプレート上に固定され、前記電子部品の底面の一対の対角のうちの一方の対角を挟む2側面に対応する形状の第1の複数の電子部品挟持部がその長手方向に沿って形成された第1のガイドブロックと、
前記複数の位置決め孔の他の所定の位置にねじ止めされる他の位置決めボルトにより前記第1のガイドブロックに対向して前記シャトルプレート上に固定され、前記電子部品の底面の一対の対角のうちの他方の対角を挟む2側面に対応する形状の第2の複数の電子部品挟持部がその長手方向に沿って形成された第2のガイドブロックと、
前記シャトルプレート上に設けられ、前記第1、第2のガイドブロックの長手方向に沿って前記第1、第2の電子部品挟持部間に挟持される複数の電子部品の上面に沿って前記シャトルプレートの一方の端部から他方の端部に至る光軸を有する光を照射する発光部と、前記他方の端部で前記光を検知する光センサとを含む透過型光センサと、
前記電子部品の厚みに応じて前記照射された光が第1、第2の電子部品挟持部間に挟持される複数の電子部品の上面からそれぞれ所定距離離隔した位置を通過するように設定するセンサスリットと、
前記センサスリットの高さ位置を調節する高さ位置調節装置と、
を具備し、
前記第1、第2のガイドブロックが搬送すべき電子部品の底面の前記一対の対角の間の距離に応じて予め決められた位置決め孔を用いて前記シャトルプレート上に固定されて形成された電子部品の保持空間に複数の電子部品を保持する、電子部品の搬送装置を提供する。
複数の底面が矩形で直方体形状の電子部品をその上面に載置して搬送する搬送プレートと、
前記搬送プレート上に載置される複数の電子部品の前記底面の夫々の一対の対角のうちの一方の対角を挟む2側面に対応する内側形状を有し、前記搬送プレート上に固定される複数の電子部品挟持部と、
前記複数の電子部品の底面寸法より大きい内寸を有する複数の格子を有する格子プレートであって、この格子プレートが前記搬送プレート上に載置されたときにその各格子の一対の対角のうちの一方の対角を挟む2側面が前記搬送プレート上に固定された前記電子部品挟持部の外側面から所定距離だけ離れるように近接して位置づけられ、前記格子の他方の対角を挟む2側面が前記電子部品の他方の対角を挟む2側面に対応する形状を有し、前記搬送プレート上に固定される格子プレートと、
を具備し、
前記格子プレートの格子の一方の対角を挟む2側面に近接して搬送プレート上に固定された電子部品挟持部と前記格子の他方の対角を挟む2側面との間には搬送すべき電子部品の外形寸法に応じて複数の電子部品保持空間が形成されることを特徴とする、電子部品の搬送装置を提供する。
Claims (2)
- 複数の位置決め孔を持ち、複数の底面が矩形の直方体形状の電子部品をその上面に載置して搬送するシャトルプレートと、
前記複数の位置決め孔の所定の位置にねじ止めされる位置決めボルトにより前記シャトルプレート上に固定され、前記電子部品の底面の一対の対角のうちの一方の対角を挟む2側面に対応する形状の第1の複数の電子部品挟持部がその長手方向に沿って形成された第1のガイドブロックと、
前記複数の位置決め孔の他の所定の位置にねじ止めされる他の位置決めボルトにより前記第1のガイドブロックに対向して前記シャトルプレート上に固定され、前記電子部品の底面の一対の対角のうちの他方の対角を挟む2側面に対応する形状の第2の複数の電子部品挟持部がその長手方向に沿って形成された第2のガイドブロックと、
前記シャトルプレート上に設けられ、前記第1、第2のガイドブロックの長手方向に沿って前記第1、第2の電子部品挟持部間に挟持される複数の電子部品の上面に沿って前記シャトルプレートの一方の端部から他方の端部に至る光軸を有する光を照射する発光部と、前記他方の端部で前記光を検知する光センサとを含む透過型光センサと、
前記電子部品の厚みに応じて前記照射された光が第1、第2の電子部品挟持部間に挟持される複数の電子部品の上面からそれぞれ所定距離離隔した位置を通過するように設定するセンサスリット板と、
前記センサスリット板の高さ位置を電子部品の厚みに応じて調節する高さ位置調節装置と、
を具備し、
前記第1、第2のガイドブロックが搬送すべき電子部品の底面の前記一対の対角の間の距離に応じて予め決められた位置決め孔を用いて前記シャトルプレート上に固定されて形成された電子部品の保持空間に複数の電子部品を保持する、電子部品の搬送装置。 - 前記高さ位置調節装置は、前記センサスリット板に固定されたスリット高さ合わせブロックと、前記シャトルプレートに搬送対象の電子部品が載置された状態で前記シャトルプレートに対する前記センサスリット板の高さを調節するためのスリット固定ボルトとを具備する、請求項1に記載の電子部品の搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017052963A JP6405401B2 (ja) | 2017-03-17 | 2017-03-17 | 電子部品の搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017052963A JP6405401B2 (ja) | 2017-03-17 | 2017-03-17 | 電子部品の搬送装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013120835A Division JP6220566B2 (ja) | 2013-06-07 | 2013-06-07 | 電子部品の搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017125860A true JP2017125860A (ja) | 2017-07-20 |
| JP6405401B2 JP6405401B2 (ja) | 2018-10-17 |
Family
ID=59364236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017052963A Active JP6405401B2 (ja) | 2017-03-17 | 2017-03-17 | 電子部品の搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6405401B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019120564A (ja) * | 2017-12-28 | 2019-07-22 | セイコーエプソン株式会社 | 電子部品搬送装置および電子部品検査装置 |
| JP7341569B2 (ja) | 2020-03-12 | 2023-09-11 | エイエムティ カンパニー リミテッド | 微細ピッチを有するデバイスのアライン装置及びテスト装置、並びにデバイスのアライン方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000230910A (ja) * | 1999-02-12 | 2000-08-22 | Advanced Display Inc | 基板の付着異物検査装置および付着異物除去装置および付着異物除去方法 |
| JP2002082128A (ja) * | 2000-09-08 | 2002-03-22 | Mitsubishi Materials Corp | プローブ装置 |
| US6433294B1 (en) * | 1995-07-28 | 2002-08-13 | Advantest Corporation | Semiconductor device testing apparatus and semiconductor device testing system having a plurality of semiconductor device testing apparatus |
| JP2003167020A (ja) * | 2001-12-03 | 2003-06-13 | Seiko Epson Corp | 浮き検出方法、浮き検出装置、icハンドラ及びic検査装置 |
| JP2008290877A (ja) * | 2007-05-28 | 2008-12-04 | Seiko Epson Corp | 部品検出方法、部品検出装置、及び、icハンドラ |
| JP2011191068A (ja) * | 2010-03-11 | 2011-09-29 | Shinano Electronics:Kk | Icデバイスの搬送装置 |
-
2017
- 2017-03-17 JP JP2017052963A patent/JP6405401B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6433294B1 (en) * | 1995-07-28 | 2002-08-13 | Advantest Corporation | Semiconductor device testing apparatus and semiconductor device testing system having a plurality of semiconductor device testing apparatus |
| JP2000230910A (ja) * | 1999-02-12 | 2000-08-22 | Advanced Display Inc | 基板の付着異物検査装置および付着異物除去装置および付着異物除去方法 |
| JP2002082128A (ja) * | 2000-09-08 | 2002-03-22 | Mitsubishi Materials Corp | プローブ装置 |
| JP2003167020A (ja) * | 2001-12-03 | 2003-06-13 | Seiko Epson Corp | 浮き検出方法、浮き検出装置、icハンドラ及びic検査装置 |
| JP2008290877A (ja) * | 2007-05-28 | 2008-12-04 | Seiko Epson Corp | 部品検出方法、部品検出装置、及び、icハンドラ |
| JP2011191068A (ja) * | 2010-03-11 | 2011-09-29 | Shinano Electronics:Kk | Icデバイスの搬送装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019120564A (ja) * | 2017-12-28 | 2019-07-22 | セイコーエプソン株式会社 | 電子部品搬送装置および電子部品検査装置 |
| JP7341569B2 (ja) | 2020-03-12 | 2023-09-11 | エイエムティ カンパニー リミテッド | 微細ピッチを有するデバイスのアライン装置及びテスト装置、並びにデバイスのアライン方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6405401B2 (ja) | 2018-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI593005B (zh) | 切斷裝置及切斷方法 | |
| US20180059176A1 (en) | Offline vision assist method and apparatus for integrated circuit device vision alignment | |
| JP6220566B2 (ja) | 電子部品の搬送装置 | |
| JP6405401B2 (ja) | 電子部品の搬送装置 | |
| US10041789B2 (en) | Integrated emissivity sensor alignment characterization | |
| KR20150056840A (ko) | 로봇 교정 방법 | |
| US20100205815A1 (en) | Method for Calibration of a Measuring Table of a Coordinate Measuring Machine | |
| TWI801437B (zh) | 積層基板之製造方法、積層基板之製造裝置、及記錄有積層基板之製造程序之電腦可讀取媒介 | |
| US9557375B2 (en) | Group vision alignment for double sided IC device testing | |
| JP2006185960A (ja) | 基板処理装置及びその搬送位置合わせ方法 | |
| US11305404B2 (en) | Sprung carrier | |
| KR102307841B1 (ko) | 피커 유닛 검사 시스템 | |
| JP7437991B2 (ja) | 検査装置、及び、チャックトップの位置調整方法 | |
| JP6150242B2 (ja) | 製造ラインを構成するためのユニットとその組み立て方法 | |
| KR101944398B1 (ko) | 반도체패키지용 자재정렬장치 | |
| US20160042987A1 (en) | Flexible handling system for semiconductor substrates | |
| JP6314963B2 (ja) | 電子機器及び電子機器の製造方法 | |
| KR102326005B1 (ko) | 반도체 소자 픽업 장치 | |
| JP6995027B2 (ja) | ウエハカセット | |
| TWI667182B (zh) | Mounting table and mounting method | |
| TWI612862B (zh) | 具晶片定位結構的電子模組及其晶片安裝方法 | |
| KR20070036831A (ko) | 카세트 로딩 플레이트 | |
| KR101616049B1 (ko) | 반송 로봇 티칭을 위한 지그 및 그를 이용한 반송 로봇 티칭 정보 획득 방법 | |
| TWI701518B (zh) | 使用基板矯正治具之曝光裝置以及基板矯正治具 | |
| TW201923371A (zh) | 測試區域外之視像對準系統 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180607 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20180614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180821 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180914 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6405401 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |