JP2017003541A - 光学式レーダの清掃装置 - Google Patents
光学式レーダの清掃装置 Download PDFInfo
- Publication number
- JP2017003541A JP2017003541A JP2015120928A JP2015120928A JP2017003541A JP 2017003541 A JP2017003541 A JP 2017003541A JP 2015120928 A JP2015120928 A JP 2015120928A JP 2015120928 A JP2015120928 A JP 2015120928A JP 2017003541 A JP2017003541 A JP 2017003541A
- Authority
- JP
- Japan
- Prior art keywords
- light
- unit
- receiving unit
- light transmitting
- cleaning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Measurement Of Optical Distance (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【課題】汚れを自動的に検出して除去することが可能な回転式の光学式レーダの清掃装置を提供する。
【解決手段】光学式レーダの清掃装置1は、回転式のレーザレーダ10を構成する送受光部が所定の回転位置にあるときに、送受光部と対向するように配置され、レーザ光を散乱・反射する散乱・反射部材と、電動モータにより送受光部が回転され、送受光部が散乱・反射部材40と対向する回転位置に来たときに、散乱・反射部材40により散乱・反射された反射光の受光強度に基づいて、レーザ送受光窓22が汚れているか否かを判定するECU60(汚損検知部63)と、送受光部が所定の回転位置にあるときに、送受光部と対向するように配設され、レーザ送受光窓22が汚れていると判定された場合には、送受光部が回転されて対向する回転位置に来たときに、レーザ送受光窓22を清掃する清掃ユニット50とを備える。
【選択図】図1
【解決手段】光学式レーダの清掃装置1は、回転式のレーザレーダ10を構成する送受光部が所定の回転位置にあるときに、送受光部と対向するように配置され、レーザ光を散乱・反射する散乱・反射部材と、電動モータにより送受光部が回転され、送受光部が散乱・反射部材40と対向する回転位置に来たときに、散乱・反射部材40により散乱・反射された反射光の受光強度に基づいて、レーザ送受光窓22が汚れているか否かを判定するECU60(汚損検知部63)と、送受光部が所定の回転位置にあるときに、送受光部と対向するように配設され、レーザ送受光窓22が汚れていると判定された場合には、送受光部が回転されて対向する回転位置に来たときに、レーザ送受光窓22を清掃する清掃ユニット50とを備える。
【選択図】図1
Description
本発明は、光学式レーダの清掃装置に関し、特に、車両に搭載される回転式の光学式レーダの清掃装置に関する。
従来から、例えば、自動走行車や、自動ブレーキ等の運転支援装置、ACC(アダプティブ・クルーズ・コントロール)などでは、例えば、他の車両や歩行者、構造物などの自車両の周囲に存在する物体を検知(認識)するためセンサとして、レーザレーダ(光学式レーダ)が用いられている。
ここで、レーザレーダは、レーザ光を照射して、物体に反射されて戻ってきた反射光を受光し、レーザ光を出力してから反射光を受光するまでの時間に基づいて物体との距離を計測する。そのため、車両(車外)に取り付けられるレーザレーダでは、レーザ光の送受光面が例えば泥や水滴などで汚れると、検出性能が低下し、物体との距離を誤ったり、物体を検出できなくなったりするおそれがある。
ここで、特許文献1には、使用中にレーダヘッド外部前面に付着した汚れを検出できる車両用レーザレーダ装置が開示されている。この車両用レーザレーダ装置では、装置内部の左右方向のいずれか最端に、走査するレーザ光を反射散乱させる散乱板を、反射散乱されたレーザ光が送光窓を内部から照射透過する位置に設け、送光窓の外部に付着した汚れによって送光窓から内部へ反射散乱されたレーザ光を受光素子が受光したとき、その受光量が所定のしきい値以上であれば、レーダ装置に許容量以上の汚れが付着したと判断するように構成している。
一方、特許文献2には、透過窓部への異物の付着を低減もしくは防止することのできるレーダ装置が開示されている。このレーダ装置では、車両前方に開口する導入口と、透過窓部の外部表面の周縁領域に開口する排出口とを有し、排出口の断面積が導入口の断面積よりも小さいエアダクトを、レーザ光及びその反射光を妨げず、かつ、排出口から排出された空気が透過窓部の外部表面に供給されるように設けている。よって、このレーダ装置によれば、車両が走行すると、導入口を介してエアダクト内に空気が流入し、流入した空気は圧力が高められて(流速を増して)排出口から排出され、透過窓部の外部表面全体に沿って勢いよく流れるため、透過窓部に付着している異物を吹き飛ばすことができる。
上述したように、特許文献1の車両用レーザレーダ装置によれば、レーダヘッド外部前面に付着した汚れを自動的に検出することができる。しかしながら、この車両用レーザレーダ装置は、レーザ発光素子から送出されるレーザ光を所定角度範囲にn本のビームとして走査するために回転する反射ミラーを有し、レーザ光を所定のステップで走査して送出するスキャニング方式のレーザレーダ装置を対象とするもの、すなわち、レーダヘッドが固定されているレーザレーダ装置を対象とするものであり、レーザヘッドが回転する回転式のレーザレーダには適用することができない。すなわち、回転式のレーザレーダの汚れを検出することはできない。また、この技術は、レーダヘッド外部前面に付着した汚れは自動的に検出できるものの、清掃機能を有していない。よって、汚れが検出されたときには、例えば運転者が汚れを除去する必要があった。
一方、特許文献2の技術(レーダ装置)によれば、透過窓部への異物の付着を低減もしくは防止することができる。しかしながら、この技術もレーダヘッドが固定されているレーダ装置を対象とした技術であり、レーザヘッドが回転する回転式のレーザレーダへの適用は考慮されておらず、回転式のレーザレーダでは汚れを除去することができなかった。そのため、回転式の光学式レーダの汚れを自動的に検出して除去できる技術が望まれていた。
本発明は、上記問題点を解消する為になされたものであり、汚れを自動的に検出して除去することが可能な回転式の光学式レーダの清掃装置を提供することを目的とする。
本発明に係る光学式レーダの清掃装置は、検出光を発光する発光部及び該検出光の反射光を受光する受光部を含む送受光部と、送受光部を回転させる回転手段と、送受光部の回転角度を検出する回転角度検出手段と、検出光が出射されてから、反射光が受光されるまでの時間に基づいて、周囲に存在する物体との距離を検出する距離検出部とを有する回転式の光学式レーダの清掃装置であって、送受光部が所定の回転角度にあるときに、該送受光部と対向するように配置され、検出光を反射する反射部材と、回転手段により送受光部が回転され、該送受光部が反射部材と対向する回転位置にきたときに、反射部材により反射された反射光の受光強度に基づいて、送受光部が汚れているか否かを判定する汚損検知手段と、送受光部が所定の回転位置にあるときに、該送受光部と対向するように配設され、汚損検知手段により送受光部が汚れていると判定された場合には、回転手段により送受光部が回転され、該送受光部が対向する回転位置にきたときに、該送受光部を清掃する清掃手段とを備えることを特徴とする。
本発明に係る光学式レーダの清掃装置によれば、検出光を反射する反射部材が、送受光部が所定の回転角度にあるときに、該送受光部と対向するように配置される。また、送受光部を清掃する清掃手段が、送受光部が所定の回転位置にあるときに、該送受光部と対向するように配置される。そして、送受光部が反射部材と対向する回転位置に来たときに、反射部材により反射された検出光の受光強度に基づいて、送受光部(光学式レーダ)が汚れているか否かが判定され、送受光部が汚れていると判定された場合には、送受光部が清掃手段と対向する回転位置にきたときに、該送受光部(光学式レーダ)が清掃される。そのため、回転式の光学式レーダの汚れを自動的に検出して除去することが可能となる。
本発明に係る光学式レーダの清掃装置は、車両に搭載され、反射部材が、送受光部と対向した状態で、送受光部から見て車体側に配設されていることが好ましい。
この場合、反射部材が、送受光部と対向した状態で、送受光部から見て車体側に配設されているため、反射部材を光学式レーダの検出領域外に配置することができる。よって、光学式レーダの検出領域を狭めることを防止しつつ、反射部材を配設することが可能となる。
本発明に係る光学式レーダの清掃装置では、清掃手段が、送受光部と対向した状態で、送受光部から見て車体側に配設されていることが好ましい。
この場合、清掃手段が、送受光部と対向した状態で、送受光部から見て車体側に配設されているため、清掃手段を光学式レーダの検出領域外に配置することができる。よって、光学式レーダの検出領域を狭めることを防止しつつ、清掃手段を配設することが可能となる。
本発明に係る光学式レーダの清掃装置では、汚損検知手段により送受光部が汚れているか否かの判定が行われるときには、当該判定が行われていないときよりも、回転手段が、送受光部を低速で回転させることが好ましい。
この場合、送受光部(光学式レーダ)が汚れているか否かの判定が行われるときには、送受光部が低速で回転されるため、汚れの検出、及び除去(清掃)を確実に行うことが可能となる。
本発明に係る光学式レーダの清掃装置では、清掃手段が、洗浄液又は高圧空気を噴射する噴射手段を有することが好ましい。
この場合、清掃手段が、洗浄液又は高圧空気を噴射する噴射手段を有しているため、洗浄液又は高圧空気を噴射手段から噴射することにより、送受光部(光学式レーダ)の汚れを効果的に除去することが可能となる。
本発明に係る光学式レーダの清掃装置では、汚損検知手段により送受光部が汚れていると判定された場合に、送受光部が汚れていないと判定されるまで、回転手段が、送受光部を回転し、清掃手段が、送受光部を繰り返して清掃することが好ましい。
この場合、送受光部が汚れていると判定されたときに、汚れが検出されなくなるまで、すなわち、送受光部の汚れが取り除かれるまで、送受光部が回転され、繰り返して送受光部が清掃される。よって、頑固な汚れ(ひどい汚れ)であっても確実に除去(清掃)することが可能となる。
本発明に係る光学式レーダの清掃装置は、所定の回数、送受光部が繰り返して清掃されても、該送受光部が汚れていると判定された場合に、汚れを除去することができない旨を示す警告を提示する提示手段をさらに備え、所定の回数、送受光部が繰り返して清掃されても、該送受光部が汚れていると判定された場合に、回転手段が、送受光部の回転を停止することが好ましい。
この場合、所定の回数、繰り返して清掃されても、送受光部が汚れていると判定された場合には、汚れを除去することができない旨を示す警告が提示される。そのため、運転者に対して、光学式レーダ(送受光部)が汚れていることを認識させることができる。また、その場合に、送受光部の回転が停止されるため、すなわち、光学式レーダ(送受光部)の動作が停止されるため、例えば、誤検出や誤動作を防止することが可能となる。
本発明に係る光学式レーダの清掃装置では、車両のイグニッション・スイッチがオンされたときに、回転手段が、送受光部を回転させ、汚損検知手段が、送受光部が汚れているか否かを判定し、清掃手段が、送受光部が汚れていると判定された場合に、該送受光部を清掃することが好ましい。
この場合、車両のイグニッション・スイッチがオンされたときに、送受光部が回転され、送受光部が汚れているか否かが判定され、送受光部が汚れていると判定された場合には、該送受光部が清掃される。そのため、車両が走行を開始する前に、光学式レーダ(送受光部)の汚れの有無を検知し、汚れを取り除くことが可能となる。
本発明によれば、回転式の光学式レーダの汚れを自動的に検出して除去することが可能となる。
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、図中、同一又は相当部分には同一符号を用いることとする。また、各図において、同一要素には同一符号を付して重複する説明を省略する。
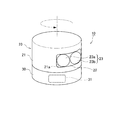
まず、図1及び図2を併せて用いて、実施形態に係る光学式レーダの清掃装置1の構成について説明する。図1は、光学式レーダの清掃装置1の全体構成を示すブロック図である。また、図2は、光学式レーダ10のレーザヘッド20の構成を示す図である。なお、ここでは、光学式レーダの清掃装置1が車両(自動車)に搭載された場合を例にして説明する。
光学式レーダの清掃装置1は、車両に搭載される回転式の光学式レーダ(以下「レーザレーダ」ともいう)10の汚れを自動的に検出して除去するものである。光学式レーダの清掃装置1は、用途や要件等に応じて、例えば、車両の四隅(左前、右前、左後、右後)、又は前後左右の側面などに配設される。光学式レーダの清掃装置1は、主として、回転式のレーザレーダ10、散乱・反射部材40、清掃ユニット50、及び、電子制御装置(以下「ECU」という)60を備えて構成されている。
レーザレーダ10は、回転しつつ水平方向を走査するように、レーザ光を照射するとともに、レーザ光の反射状態に基づいてレーザ光を反射した物体との距離を検出して、周囲に存在する物体(例えば、他の車両や歩行者、構造物等)との距離情報を取得するものである。レーザレーダ10は、主として、レーザヘッド20、電動モータ30、及びロータリエンコーダ31を備えて構成されている。
レーザヘッド20は、例えば矩形の開口部21aが形成された円筒状のハウジング21、該開口部21aに取り付けられたレーザ送受光窓22、及び該レーザ送受光窓22の内側に取り付けられた送受光部23を有している。レーザ送受光窓22は、レンズとしての機能、及び、レーザ光(例えば近赤外レーザ光)を選択的に透過させるバンドパスフィルタ(BPF)としての機能を有する略板状の部材である。
送受光部23は、レーザ光(検出光)を発光する発光部23a、及び、該レーザ光の散乱・反射光を受光する受光部23bを含んで構成されている。発光部22aとしては、例えばレーザダイオードなどの発光素子が用いられる。また、受光部22bとしては、例えばフォトダイオードなどの受光素子が用いられる。なお、発光素子及び受光素子それぞれの数は、1つであってもよいし、複数であってもよい。
送受光部23は、回転しながら、パルス状のレーザ光(例えば近赤外レーザ光)を発光部23aから、例えば水平方向(360°)に照射し、その散乱光を受光部23bで検出する。送受光部23(発光部23a、受光部23b)は、ECU60に接続されており、ECU60によって、発光部23aによるレーザ発光が制御される。また、受光部23bで検出された受光信号(情報)はECU60に出力される。そして、詳細は後述するが、ECU60において、レーザ光の反射時間(発光後に反射光を検出するまでの時間)から物体との距離が算出される。
レーザヘッド20の下側には、該レーザヘッド20(送受光部23)を360°回転駆動する電動モータ30が接続されている。電動モータ30は、ECU60の制御に従って駆動される。なお、制御の詳細については後述する。電動モータ30及びECU60は、特許請求の範囲に記載の回転手段として機能する。
ロータリエンコーダ31は、電動モータ30に取り付けられ、該電動モータ30の回転角度(位置)、すなわち、レーザヘッド20(送受光部22)の回転角度(位置)を検出する。ロータリエンコーダ31は、特許請求の範囲に記載の回転角度検出手段として機能する。ロータリエンコーダ31は、ECU60に接続されており、検出した電動モータ30(レーザヘッド20)の回転角度(位置)をECU60に出力する。
散乱・反射部材40(特許請求の範囲に記載の反射部材に相当)は、レーザレーダ10から発信されたレーザ光を散乱・反射する部材である。散乱・反射部材40は、例えば、金属や、メッキが施された樹脂などからなり、円弧状に形成されている。散乱・反射部材40は、送受光部23(レーザヘッド20)が所定の回転角度(位置)にあるときに、該送受光部23と対向するように、レーザヘッド20の側方に、周方向に沿って配置されている。より詳細には、散乱・反射部材40は、送受光部23と対向したときに、該送受光部23から見て車体90側(すなわち、レーザレーダ10の検出動作範囲外)に配置されている。なお、ECU60は、散乱・反射部材40が配置されている回転角度(位置)を予め記憶している。
清掃ユニット50は、洗浄液又は高圧空気を貯留する洗浄液/高圧空気タンク53、洗浄液又は高圧空気を噴射する噴射ノズル51(特許請求の範囲に記載の噴射手段に相当)、及び、洗浄液/高圧空気タンク53と噴射ノズル51との間に介装された電磁弁52を有して構成されている。
清掃ユニット50(噴射ノズル51)は、送受光部23(レーザヘッド20)が所定の回転角度(例えば、散乱・反射部材40のレーザヘッド回転方向後方)にあるときに、該送受光部23と対向するように、レーザヘッド20の側方に、周方向に沿って配置されている。より詳細には、清掃ユニット50(噴射ノズル51)は、送受光部23と対向したときに、該送受光部23から見て車体90側(すなわち、レーザレーダ10の検出動作範囲外)に配置されている。なお、ECU60は、清掃ユニット50(噴射ノズル51)が配置されている回転角度(位置)を予め記憶している。
清掃ユニット50(噴射ノズル51)は、ECU60(汚損検知部63)により送受光部23(レーザ送受光窓22)が汚れていると判定された場合(詳細は後述する)には、電動モータ30によってレーザヘッド20(送受光部23)が回転され、送受光部23が対向する回転位置に来たときに、該送受光部23(レーザ送受光窓22)を清掃する。すなわち、清掃ユニット50は、特許請求の範囲に記載の清掃手段として機能する。
ここで、電磁弁52は、通電時にのみ開弁されるノーマリクローズ型の電磁弁である。電磁弁52は、ECU60に接続されており、電磁弁52の開閉(すなわち、洗浄液又は高圧空気の噴射)はECU60によって制御される。よって、送受光部23(レーザ送受光窓22)の清掃/洗浄を行うときには、電磁弁52がECU60により開弁され、洗浄液/高圧空気タンク53に貯留されている洗浄液又は高圧空気が噴射ノズル51に供給されて、噴射ノズル51から噴射される。これにより、レーザ送受光窓22の汚れが除去される。一方、受信部23(レーザ送受光窓22)の清掃/洗浄を行わないときには、電磁弁52がECU60により閉弁され、洗浄液又は高圧空気の供給が停止される。
なお、清掃ユニット50は、ECU60の制御指示に従い、ECU60(汚損検知部63)により送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、その後、送受光部23(レーザ送受光窓22)が汚れていないと判定されるまで(又は、清掃回数が所定の回数以上となるまで)、送受光部23(レーザ送受光窓22)を繰り返して清掃する。
上述したように、送受光部23、電動モータ30、ロータリエンコーダ31、及び電磁弁52などは、ECU60に接続されている。また、ECU60には、イグニッション・スイッチ80等も(直接的あるいは間接的に)接続されている。さらに、ECU60は、例えばCAN(Controller Area Network)を介して、メータ・コントロールユニット(以下「MCU」という)70等と相互に通信可能に接続されている。
ECU60は、演算を行うマイクロプロセッサ、該マイクロプロセッサに各処理を実行させるためのプログラム等を記憶するROM、演算結果などの各種データを記憶するRAM、バッテリによってその記憶内容が保持されるバックアップRAM、及び入出力I/F等を有して構成されている。また、ECU60は、発光部23aに対して例えばパルス状のレーザ駆動信号を出力する出力回路、電動モータ30を駆動するモータドライバ、及び電磁弁52を駆動するドライバ回路等を備えている。
そして、ECU60は、受光部23bやロータリエンコーダ31などから取得した各種情報に基づいて、発光部23a(送受光部23)、電動モータ30、及び電磁弁52等を制御することにより光学式レーダの清掃装置1を総合的に制御する。
特に、ECU60は、回転式レーザレーダ10の送受光部23(レーザ送受光窓22)の汚れを自動的に検出して除去する機能を有している。そのため、ECU60は、モータ制御部61、距離検出部62、及び汚損検知部63を機能的に有している。ECU60では、ROMに記憶されているプログラムがマイクロプロセッサによって実行されることにより、モータ制御部61、距離検出部62、及び汚損検知部63の各機能が実現される。
モータ制御部61は、後述する汚損検知部63により送受光部23(レーザ送受光窓22)が汚れているか否かの判定が行われるときには、当該判定が行われていないとき(通常検出時)よりも、電動モータ30(レーザヘッド20)を低速で回転させる。モータ制御部61は、通常検出時には、例えば、5〜15Hzで電動モータ30(レーザヘッド20)を回転させ、汚れ検出・清掃時には、例えば、0.1Hz程度で電動モータ30(レーザヘッド20)を回転させる。
また、モータ制御部61は、汚損検知部63により送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、その後、送受光部23(レーザ送受光窓22)が汚れていないと判定されるまで、電動モータ30(レーザヘッド20)を回転する。ただし、モータ制御部61は、送受光部23(レーザ送受光窓22)が、所定の回数、繰り返して清掃されても、該送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、電動モータ30(レーザヘッド20)の回転を停止する。
さらに、モータ制御部61は、車両のイグニッション・スイッチがオンされたとき(電源オン時)に、汚れ検出・清掃を実行するため、レーザヘッド20(送受光部23)を回転させる。
距離検出部62は、レーザ光が出射されてから、反射光が受光されるまでの時間に基づいて、周囲に存在する物体(レーザ光を反射した物体)との距離を検出する。その際に、距離検出部62は、例えば、レーザ光の位相差を時間差に変換して、光の速度をかけることで、物体までの距離を求めるTOF(Time Of Flight)方式を利用して距離を検出する。
汚損検知部63は、電動モータ30により送受光部23(レーザヘッド20)が回転され、該送受光部23が散乱・反射部材40と対向する回転角度(位置)に来たときに、散乱・反射部材40により散乱・反射されたレーザ光の受光強度(ゲイン)に基づいて、送受光部23(レーザ送受光窓22)が汚れているか否かを判定する。すなわち、汚損検知部63は、特許請求の範囲に記載の汚損検知手段として機能する。なお、汚損検知部63は、上記受光強度(ゲイン)が所定強度未満の場合に、送受光部23(レーザ送受光窓22)が汚れていると判定する。
特に、汚損検知部63は、車両のイグニッション・スイッチ80がオンされたとき(電源オン時)に、送受光部23(レーザ送受光窓22)が汚れているか否かを判定する。なお、汚損検知部63により送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、送受光部23(レーザ送受光窓22)が回転されて清掃ユニット50(噴射ノズル51)と対向する位置に来たときに、電磁弁52が開弁されて、洗浄液又は高圧空気が噴射され、送受光部23(レーザ送受光窓22)の清掃が行われる。
MCU70は、例えば、コンビネーションメータ内やダッシュボードの上部などに配設されたLCDディスプレイ等からなるマルチファンクション・ディスプレイ71と接続されており、該マルチファンクション・ディスプレイ71を駆動して、例えば、レーザレーダ10の検出結果や汚れに関する情報を含む各種情報を運転者に提示する。
特に、MCU70は、繰り返し清掃してもレーザレーダ10の送受光部23(レーザ送受光窓22)の汚れを除去できない場合に、運転者に対して警告を発する。その際に、MCU70は、マルチファンクション・ディスプレイ71を駆動し、例えば、警告灯を点灯させたり、レーザレーダ10の送受光部23(レーザ送受光窓22)の汚れを除去できないこと(すなわち、レーザレーダ10が動作を停止すること)を文字で表示したりすることが好ましい。また、同時に警告音を出力するようにしてもよい。MCU70及びマルチファンクション・ディスプレイ71は、特許請求の範囲に記載の提示手段として機能する。
次に、図3を参照しつつ、光学式レーダの清掃装置1の動作について説明する。図3は、レーザレーダの清掃装置1による、レーザレーダ10の送受光部23(レーザ送受光窓22)の清掃処理の処理手順を示すフローチャートである。本処理は、主として、ECU60において、所定のタイミングで繰り返して実行される。
まず、ステップS100では、清掃回数をカウントするカウンタがクリア(ゼロがセット)される。次に、ステップS102では、レーザヘッド20(送受光部23)が低速で回転される。
続いて、ステップS104では、送受光部23が散乱・反射部材40と対向する回転位置まで回転したか否かについての判断が行われる。ここで、送受光部23が散乱・反射部材40と対向する回転位置まで来ていない場合には、送受光部23が散乱・反射部材40と対向する回転位置に来るまで、レーザヘッド20(送受光部23)が回転される。一方、送受光部23が散乱・反射部材40と対向する回転位置まで来ているときには、ステップS106に処理が移行する。
ステップS106では、レーザ光が散乱・反射部材40に対して照射され、その反射光が受光される。次に、ステップS108では、ステップS106で受光された反射光の強度(ゲイン)が所定強度以上であるか否かについての判断が行われる。ここで、反射光の強度(ゲイン)が所定強度以上である場合には、送受光部23が汚れていないと判定され、本処理から抜けて、通常動作に移る。一方、反射光の強度(ゲイン)が所定強度未満であるときには、送受光部23が汚れていると判定され、ステップS110に処理が移行する。
ステップS110では、清掃回数をカウントするカウンタの値が所定値以上であるか否か、すなわち所定回数以上繰り返して清掃が行われたか否かについての判断が行われる。ここで、清掃回数をカウントするカウンタの値が所定値以上である場合には、ステップS112に処理が移行する。一方、清掃回数をカウントするカウンタの値が所定値未満のときには、ステップS114に処理が移行する。
ステップS112では、汚れを除去することができない旨を示す警告が提示されるとともに、送受光部23(レーザヘッド20)の回転が停止、すなわち、レーザレーダ10の動作が停止される。その後、本処理から一旦抜ける。
続いて、ステップS114では、送受光部23が清掃ユニット50(噴射ノズル51)と対向する回転位置まで回転したか否かについての判断が行われる。ここで、送受光部23が清掃ユニット50(噴射ノズル51)と対向する回転位置まで来ていない場合には、送受光部23が清掃ユニット50(噴射ノズル51)と対向する回転位置に来るまで、レーザヘッド20(送受光部23)が回転される。一方、送受光部23が清掃ユニット50(噴射ノズル51)と対向する回転位置まで来ているときには、ステップS116に処理が移行する。
ステップS116では、電磁弁52が開弁され、洗浄液又は高圧空気が噴射ノズル51から送受光部23(レーザ送受光窓22)に対して噴射されることにより、送受光部23(レーザ送受光窓22)の清掃/洗浄が行われる。
そして、ステップS118において、清掃回数をカウントするカウンタの値がインクリメント(1加算)された後、ステップS102に処理が移行し、送受光部23が汚れていない(すなわち汚れが除去された)と判断されるか、又は、清掃回数が所定値以上となるまで、上述したステップS102以降の処理が繰り返して実行される。
以上、詳細に説明したように、本実施形態によれば、レーザ光を散乱・反射する散乱・反射部材40が、送受光部23(レーザヘッド20)の所定の回転角度において、送受光部23(レーザ送受光窓22)と対向するように配置されている。また、送受光部23(レーザ送受光窓22)を清掃する清掃ユニット50が、送受光部23(レーザヘッド20)の所定の回転位置において、送受光部23と対向するように配置されている。そして、送受光部23が散乱・反射部材40と対向する回転位置にきたときに、散乱・反射部材40により散乱・反射されたレーザ光の受光強度に基づいて送受光部23(レーザ送受光窓22)が汚れているか否かが判定され、送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、送受光部23(レーザ送受光窓22)が清掃ユニット50(噴射ノズル51)と対向する回転位置にきたときに、該送受光部23(レーザ送受光窓22)が清掃される。そのため、回転式のレーザレーダ10(レーザ送受光窓22)の汚れを自動的に検出(自己診断)して除去することが可能となる。
本実施形態によれば、散乱・反射部材40が、送受光部23(レーザ送受光窓22)と対向した状態で、送受光部23(レーザ送受光窓22)から見て車体側に配設されているため、散乱・反射部材40をレーザレーダ10の検出領域外(検出動作範囲外)に配置することができる。よって、レーザレーダ10の検出領域を狭めることを防止しつつ、散乱・反射部材40を配設することが可能となる。
本実施形態によれば、清掃ユニット50が、送受光部23(レーザ送受光窓22)と対向した状態で、送受光部23(レーザ送受光窓22)から見て車体側に配設されているため、清掃ユニット50をレーザレーダ10の検出領域外(検出動作範囲外)に配置することができる。よって、レーザレーダ10の検出領域を狭めることを防止しつつ、清掃ユニット50を配設することが可能となる。
本実施形態によれば、送受光部23(レーザ送受光窓22)が汚れているか否かの判定が行われるときには、(通常検出時よりも)、レーザヘッド20(送受光部23)が低速で回転されるため、汚れの検出、及び除去(清掃)を確実に行うことが可能となる。
本実施形態によれば、清掃ユニット50が、洗浄液又は高圧空気を噴射する噴射ノズル51を有しているため、洗浄液又は高圧空気を噴射ノズル51から噴射することにより、送受光部23(レーザ送受光窓22)の汚れを効果的に除去することが可能となる。
本実施形態によれば、送受光部23(レーザ送受光窓22)が汚れていると判定されたときに、汚れが検出されなくなるまで、すなわち、送受光部23(レーザ送受光窓22)の汚れが取り除かれるまで、レーザヘッド20(送受光部23)が回転され、繰り返して送受光部23(レーザ送受光窓22)が清掃/洗浄される。よって、頑固な汚れ(ひどい汚れ)であっても確実に除去(清掃)することが可能となる。
本実施形態によれば、所定の回数、繰り返して清掃されても、送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、汚れを除去することができない旨を示す警告が提示される。そのため、運転者に対して、送受光部23(レーザ送受光窓22)が汚れていることを認識させることができる。また、その場合に、レーザヘッド20(送受光部23)の回転が停止されるため、すなわち、レーザレーダ10の動作が停止されるため、例えば、誤検出や誤動作を防止することが可能となる。
本実施形態によれば、車両のイグニッション・スイッチ80がオンされたときに、レーザヘッド10(送受光部23)が回転され、送受光部23(レーザ送受光窓22)が汚れているか否かが判定され、送受光部23(レーザ送受光窓22)が汚れていると判定された場合には、該送受光部23(レーザ送受光窓22)が清掃される。そのため、車両が走行を開始する前に、送受光部23(レーザ送受光窓22)の汚れの有無を検知し、汚れを取り除くことが可能(すなわち、走行時に性能を発揮することが可能)となる。
以上、本発明の実施の形態について説明したが、本発明は、上記実施形態に限定されるものではなく種々の変形が可能である。例えば、上記実施形態では、高圧の空気等を洗浄液/高圧空気タンク53に貯留しておき、その高圧の空気等を噴射したが、例えば、常圧の空気等を電動モータ等で加圧(昇圧)して噴射する構成としてもよい。
また、発光部23aで用いられる発光素子や受光部23bで用いられる受光素子は、上記実施形態には限られない。
また、本発明のシステム構成は、上述した構成に限られることなく、例えば、ECU60は、レーザレーダ10に内蔵されていてもよく、あるいは、独立したユニットであってもよい。
上記実施形態では、本発明を車両(自動車)に搭載した場合を例にして説明したが、本発明は自動車以外に搭載することもできる。
また、散乱・反射部材40や清掃ユニット50(噴射ノズル51)の配置は、上記実施形態(図1)に限られることなく、レーザレーダ10の検出動作範囲外(車体によりレーザ光が遮られる角度範囲内)であれば任意の位置に配置することができる。
1 光学式レーダの清掃装置
10 レーザレーダ
20 レーザヘッド
21 ハウジング
21a 開口部
22 レーザ送受光窓
23 送受光部
23a 発光部
23b 受光部
30 電動モータ
31 ロータリエンコーダ
40 散乱・反射部材
50 清掃ユニット
51 噴射ノズル
52 電磁弁
53 洗浄液/高圧空気タンク
60 ECU
61 モータ制御部
62 距離検出部
63 汚損検知部
70 MCU
71 マルチファンクション・ディスプレイ
80 イグニッション・スイッチ
90 車体
10 レーザレーダ
20 レーザヘッド
21 ハウジング
21a 開口部
22 レーザ送受光窓
23 送受光部
23a 発光部
23b 受光部
30 電動モータ
31 ロータリエンコーダ
40 散乱・反射部材
50 清掃ユニット
51 噴射ノズル
52 電磁弁
53 洗浄液/高圧空気タンク
60 ECU
61 モータ制御部
62 距離検出部
63 汚損検知部
70 MCU
71 マルチファンクション・ディスプレイ
80 イグニッション・スイッチ
90 車体
Claims (8)
- 検出光を発光する発光部及び該検出光の反射光を受光する受光部を含む送受光部と、前記送受光部を回転させる回転手段と、前記送受光部の回転角度を検出する回転角度検出手段と、検出光が出射されてから、反射光が受光されるまでの時間に基づいて、周囲に存在する物体との距離を検出する距離検出部と、を有する回転式の光学式レーダの清掃装置であって、
前記送受光部が所定の回転角度にあるときに、該送受光部と対向するように配置され、検出光を反射する反射部材と、
前記回転手段により前記送受光部が回転され、該送受光部が反射部材と対向する回転位置にきたときに、前記反射部材により反射された反射光の受光強度に基づいて、前記送受光部が汚れているか否かを判定する汚損検知手段と、
前記送受光部が所定の回転位置にあるときに、該送受光部と対向するように配設され、前記汚損検知手段により前記送受光部が汚れていると判定された場合には、前記回転手段により前記送受光部が回転され、該送受光部が対向する回転位置にきたときに、該送受光部を清掃する清掃手段と、を備えることを特徴とする光学式レーダの清掃装置。 - 前記光学式レーダの清掃装置は、車両に搭載され、
前記反射部材は、前記送受光部と対向した状態で、前記送受光部から見て車体側に配設されていることを特徴とする請求項1に記載の光学式レーダの清掃装置。 - 前記清掃手段は、前記送受光部と対向した状態で、前記送受光部から見て車体側に配設されていることを特徴とする請求項2に記載の光学式レーダの清掃装置。
- 前記回転手段は、前記汚損検知手段により前記送受光部が汚れているか否かの判定が行われるときには、当該判定が行われていないときよりも、前記送受光部を低速で回転させることを特徴とする請求項1〜3のいずれか1項に記載の光学式レーダの清掃装置。
- 前記清掃手段は、洗浄液又は高圧空気を噴射する噴射手段を有することを特徴とする請求項1〜4のいずれか1項に記載の光学式レーダの清掃装置。
- 前記汚損検知手段により前記送受光部が汚れていると判定された場合に、前記回転手段は、前記送受光部が汚れていないと判定されるまで、前記送受光部を回転し、
前記清掃手段は、前記送受光部が汚れていないと判定されるまで、前記送受光部を繰り返して清掃することを特徴とする請求項1〜5のいずれか1項に記載の光学式レーダの清掃装置。 - 前記送受光部が、所定の回数、繰り返して清掃されても、該送受光部が汚れていると判定された場合に、汚れを除去することができない旨を示す警告を提示する提示手段をさらに備え、
前記送受光部が、所定の回数、繰り返して清掃されても、該送受光部が汚れていると判定された場合に、前記回転手段は、前記送受光部の回転を停止することを特徴とする請求項6に記載の光学式レーダの清掃装置。 - 車両のイグニッション・スイッチがオンされたときに、
前記回転手段は、前記送受光部を回転させ、
前記汚損検知手段は、前記送受光部が汚れているか否かを判定し、
前記清掃手段は、前記送受光部が汚れていると判定された場合に、該送受光部を清掃することを特徴とする請求項2〜7のいずれか1項に記載の光学式レーダの清掃装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015120928A JP2017003541A (ja) | 2015-06-16 | 2015-06-16 | 光学式レーダの清掃装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015120928A JP2017003541A (ja) | 2015-06-16 | 2015-06-16 | 光学式レーダの清掃装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017003541A true JP2017003541A (ja) | 2017-01-05 |
Family
ID=57754003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015120928A Pending JP2017003541A (ja) | 2015-06-16 | 2015-06-16 | 光学式レーダの清掃装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017003541A (ja) |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107797108A (zh) * | 2017-10-16 | 2018-03-13 | 平步青 | 一种搭载混合动力的全地形雷达探测车 |
| CN109060121A (zh) * | 2018-06-27 | 2018-12-21 | 中国建筑第二工程局有限公司 | 一种光污染检测装置 |
| WO2019049381A1 (ja) * | 2017-09-11 | 2019-03-14 | 本田技研工業株式会社 | 車両 |
| CN109760598A (zh) * | 2019-03-06 | 2019-05-17 | 阮忠诚 | 一种智能汽车用雷达安装支座 |
| CN109917392A (zh) * | 2019-01-08 | 2019-06-21 | 江苏日盈电子股份有限公司 | 雷达系统、清洗装置及其应用 |
| CN110208772A (zh) * | 2019-05-27 | 2019-09-06 | 驭势科技(北京)有限公司 | 激光雷达保护罩和激光雷达装置 |
| WO2019172159A1 (ja) * | 2018-03-07 | 2019-09-12 | 株式会社小糸製作所 | 車両用クリーナシステムおよび車両システム |
| CN110352028A (zh) * | 2017-11-10 | 2019-10-18 | 松下知识产权经营株式会社 | 移动机器人以及移动机器人的控制方法 |
| WO2019207953A1 (ja) * | 2018-04-26 | 2019-10-31 | ソニー株式会社 | 測距装置及び測距モジュール |
| JP2019218049A (ja) * | 2018-06-19 | 2019-12-26 | ヴァレオ システム デシュヤージュValeo Systemes D’Essuyage | 光学素子又は光学素子保護装置をクリーニングするためのモジュール及び関連する運転支援システム |
| KR20200023089A (ko) * | 2018-08-24 | 2020-03-04 | (주) 캔랩 | 차량의 장애물 감지를 위한 장애물 감지 방법 및 장애물 감지 장치 |
| US10589724B2 (en) | 2017-07-12 | 2020-03-17 | Ford Global Technologies, Llc | Stowable vehicle sensor |
| US10633094B2 (en) | 2017-07-05 | 2020-04-28 | Ford Global Technologies | Unmanned aerial vehicle for cleaning |
| WO2020170679A1 (ja) * | 2019-02-18 | 2020-08-27 | 株式会社小糸製作所 | 車両用センシングシステム及び車両 |
| CN111589774A (zh) * | 2020-05-26 | 2020-08-28 | 山东大学 | 一种激光雷达表面清理机构及激光雷达监测装置 |
| GB2585617A (en) * | 2018-11-20 | 2021-01-13 | Motional Ad Llc | Self-cleaning sensor housings |
| US20210048532A1 (en) * | 2019-08-16 | 2021-02-18 | WeRide Corp. | Optical system, method and apparatus for diagnosing the same |
| CN112660072A (zh) * | 2020-12-03 | 2021-04-16 | 北京百度网讯科技有限公司 | 激光雷达基座、激光雷达装置及自动驾驶车辆 |
| WO2021141184A1 (ko) * | 2020-01-08 | 2021-07-15 | 엘지전자 주식회사 | 라이다 시스템과 이를 이용한 자율 주행 시스템 |
| JP2021117100A (ja) * | 2020-01-27 | 2021-08-10 | 三菱電機エンジニアリング株式会社 | レーザ測距装置 |
| CN113945905A (zh) * | 2020-07-17 | 2022-01-18 | 江苏日盈电子股份有限公司 | 激光雷达、雷达清洗装置及其雷达清洗方法 |
| WO2022220029A1 (ja) | 2021-04-14 | 2022-10-20 | 日立建機株式会社 | 運搬車両及び運搬システム |
| EP4098497A4 (en) * | 2020-01-29 | 2024-03-20 | Earth Support LLC | DETECTION DEVICE |
-
2015
- 2015-06-16 JP JP2015120928A patent/JP2017003541A/ja active Pending
Cited By (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10633094B2 (en) | 2017-07-05 | 2020-04-28 | Ford Global Technologies | Unmanned aerial vehicle for cleaning |
| US10589724B2 (en) | 2017-07-12 | 2020-03-17 | Ford Global Technologies, Llc | Stowable vehicle sensor |
| CN111051155A (zh) * | 2017-09-11 | 2020-04-21 | 本田技研工业株式会社 | 车辆 |
| WO2019049381A1 (ja) * | 2017-09-11 | 2019-03-14 | 本田技研工業株式会社 | 車両 |
| JPWO2019049381A1 (ja) * | 2017-09-11 | 2020-09-17 | 本田技研工業株式会社 | 車両 |
| CN107797108A (zh) * | 2017-10-16 | 2018-03-13 | 平步青 | 一种搭载混合动力的全地形雷达探测车 |
| CN110352028B (zh) * | 2017-11-10 | 2021-11-19 | 松下知识产权经营株式会社 | 移动机器人以及移动机器人的控制方法 |
| CN110352028A (zh) * | 2017-11-10 | 2019-10-18 | 松下知识产权经营株式会社 | 移动机器人以及移动机器人的控制方法 |
| JP7402153B2 (ja) | 2018-03-07 | 2023-12-20 | 株式会社小糸製作所 | 車両用クリーナシステムおよび車両システム |
| WO2019172159A1 (ja) * | 2018-03-07 | 2019-09-12 | 株式会社小糸製作所 | 車両用クリーナシステムおよび車両システム |
| JPWO2019172159A1 (ja) * | 2018-03-07 | 2021-03-04 | 株式会社小糸製作所 | 車両用クリーナシステムおよび車両システム |
| US11772612B2 (en) | 2018-03-07 | 2023-10-03 | Koito Manufacturing Co., Ltd. | Vehicle cleaner system and vehicle system |
| WO2019207953A1 (ja) * | 2018-04-26 | 2019-10-31 | ソニー株式会社 | 測距装置及び測距モジュール |
| US12025738B2 (en) | 2018-04-26 | 2024-07-02 | Sony Corporation | Ranging device and ranging module |
| JP2019218049A (ja) * | 2018-06-19 | 2019-12-26 | ヴァレオ システム デシュヤージュValeo Systemes D’Essuyage | 光学素子又は光学素子保護装置をクリーニングするためのモジュール及び関連する運転支援システム |
| JP7436154B2 (ja) | 2018-06-19 | 2024-02-21 | ヴァレオ システム デシュヤージュ | 光学素子又は光学素子保護装置をクリーニングするためのモジュール及び関連する運転支援システム |
| CN109060121A (zh) * | 2018-06-27 | 2018-12-21 | 中国建筑第二工程局有限公司 | 一种光污染检测装置 |
| KR20200023089A (ko) * | 2018-08-24 | 2020-03-04 | (주) 캔랩 | 차량의 장애물 감지를 위한 장애물 감지 방법 및 장애물 감지 장치 |
| KR102110776B1 (ko) * | 2018-08-24 | 2020-05-14 | (주) 캔랩 | 차량의 장애물 감지를 위한 장애물 감지 방법 및 장애물 감지 장치 |
| GB2585617A (en) * | 2018-11-20 | 2021-01-13 | Motional Ad Llc | Self-cleaning sensor housings |
| GB2585617B (en) * | 2018-11-20 | 2022-06-22 | Motional Ad Llc | Self-cleaning sensor housings |
| CN109917392A (zh) * | 2019-01-08 | 2019-06-21 | 江苏日盈电子股份有限公司 | 雷达系统、清洗装置及其应用 |
| CN113453966A (zh) * | 2019-02-18 | 2021-09-28 | 株式会社小糸制作所 | 车辆用传感系统及车辆 |
| WO2020170679A1 (ja) * | 2019-02-18 | 2020-08-27 | 株式会社小糸製作所 | 車両用センシングシステム及び車両 |
| CN109760598A (zh) * | 2019-03-06 | 2019-05-17 | 阮忠诚 | 一种智能汽车用雷达安装支座 |
| CN110208772A (zh) * | 2019-05-27 | 2019-09-06 | 驭势科技(北京)有限公司 | 激光雷达保护罩和激光雷达装置 |
| US11977166B2 (en) * | 2019-08-16 | 2024-05-07 | WeRide Corp. | Optical system, method and apparatus for diagnosing the same |
| US20210048532A1 (en) * | 2019-08-16 | 2021-02-18 | WeRide Corp. | Optical system, method and apparatus for diagnosing the same |
| WO2021141184A1 (ko) * | 2020-01-08 | 2021-07-15 | 엘지전자 주식회사 | 라이다 시스템과 이를 이용한 자율 주행 시스템 |
| JP2021117100A (ja) * | 2020-01-27 | 2021-08-10 | 三菱電機エンジニアリング株式会社 | レーザ測距装置 |
| JP7511349B2 (ja) | 2020-01-27 | 2024-07-05 | 三菱電機エンジニアリング株式会社 | レーザ測距装置 |
| EP4098497A4 (en) * | 2020-01-29 | 2024-03-20 | Earth Support LLC | DETECTION DEVICE |
| CN111589774B (zh) * | 2020-05-26 | 2021-08-17 | 山东省交通规划设计院集团有限公司 | 一种激光雷达表面清理机构及激光雷达监测装置 |
| CN111589774A (zh) * | 2020-05-26 | 2020-08-28 | 山东大学 | 一种激光雷达表面清理机构及激光雷达监测装置 |
| CN113945905A (zh) * | 2020-07-17 | 2022-01-18 | 江苏日盈电子股份有限公司 | 激光雷达、雷达清洗装置及其雷达清洗方法 |
| CN112660072A (zh) * | 2020-12-03 | 2021-04-16 | 北京百度网讯科技有限公司 | 激光雷达基座、激光雷达装置及自动驾驶车辆 |
| WO2022220029A1 (ja) | 2021-04-14 | 2022-10-20 | 日立建機株式会社 | 運搬車両及び運搬システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017003541A (ja) | 光学式レーダの清掃装置 | |
| WO2019187241A1 (ja) | 車載センサ洗浄装置 | |
| JP6998328B2 (ja) | 車両用クリーナシステムおよび車両用クリーナシステムを備える車両 | |
| CN111479728A (zh) | 车用清扫系统 | |
| US20150090291A1 (en) | Apparatus and method for removing contamination from distance measuring sensor for vehicle | |
| JP2016187990A (ja) | 車両用周辺情報検出構造 | |
| WO2019059083A1 (ja) | 車両用センサシステム、当該車両用センサシステムを備えた車両、および車両 | |
| CN112770947B (zh) | 机动车驾驶员辅助系统 | |
| WO2020255781A1 (ja) | 車両用クリーナシステム及び車両用クリーナ付きセンサシステム | |
| CN113173144B (zh) | 车载传感器清洗装置 | |
| CN110341654B (zh) | 驾驶支持装置 | |
| CN112292292A (zh) | 车辆用清扫装置、车辆用清扫系统及车辆用清扫系统的控制方法 | |
| CN113994143A (zh) | 车辆用空气幕装置、车辆用清洁系统、车辆用空气幕系统 | |
| CN111819120A (zh) | 车辆用清洁系统 | |
| US20130087169A1 (en) | Rear washer fluid enable/disable | |
| JP2008137548A (ja) | 車輌用ウォッシャ装置 | |
| CN114475527B (zh) | 车辆的传感器面清洗装置 | |
| US20210387597A1 (en) | Device for cleaning a driver assistance sensor of a motor vehicle | |
| JP7107175B2 (ja) | ワイパ装置 | |
| JP2019104364A (ja) | 車両用洗浄システム | |
| JP7125849B2 (ja) | 車両システム | |
| KR102661159B1 (ko) | 슬라이딩 방식 차량용 라이다 센서 세정장치 | |
| JP2011153985A (ja) | プロジェクタ型ヘッドランプの汚れ検出装置 | |
| CN112124254B (zh) | 车载传感器清洗装置 | |
| JPH0514961U (ja) | 車間距離測定装置 |