JP2016189664A - 系統安定化制御装置および電力系統制御システム - Google Patents
系統安定化制御装置および電力系統制御システム Download PDFInfo
- Publication number
- JP2016189664A JP2016189664A JP2015068757A JP2015068757A JP2016189664A JP 2016189664 A JP2016189664 A JP 2016189664A JP 2015068757 A JP2015068757 A JP 2015068757A JP 2015068757 A JP2015068757 A JP 2015068757A JP 2016189664 A JP2016189664 A JP 2016189664A
- Authority
- JP
- Japan
- Prior art keywords
- control
- information
- control device
- measurement
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J3/00—Circuit arrangements for ac mains or ac distribution networks
- H02J3/24—Arrangements for preventing or reducing oscillations of power in networks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/40—Testing power supplies
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B9/00—Safety arrangements
- G05B9/02—Safety arrangements electric
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J13/00—Circuit arrangements for providing remote indication of network conditions, e.g. an instantaneous record of the open or closed condition of each circuitbreaker in the network; Circuit arrangements for providing remote control of switching means in a power distribution network, e.g. switching in and out of current consumers by using a pulse code signal carried by the network
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J13/00—Circuit arrangements for providing remote indication of network conditions, e.g. an instantaneous record of the open or closed condition of each circuitbreaker in the network; Circuit arrangements for providing remote control of switching means in a power distribution network, e.g. switching in and out of current consumers by using a pulse code signal carried by the network
- H02J13/00002—Circuit arrangements for providing remote indication of network conditions, e.g. an instantaneous record of the open or closed condition of each circuitbreaker in the network; Circuit arrangements for providing remote control of switching means in a power distribution network, e.g. switching in and out of current consumers by using a pulse code signal carried by the network characterised by monitoring
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J13/00—Circuit arrangements for providing remote indication of network conditions, e.g. an instantaneous record of the open or closed condition of each circuitbreaker in the network; Circuit arrangements for providing remote control of switching means in a power distribution network, e.g. switching in and out of current consumers by using a pulse code signal carried by the network
- H02J13/00032—Systems characterised by the controlled or operated power network elements or equipment, the power network elements or equipment not otherwise provided for
- H02J13/00034—Systems characterised by the controlled or operated power network elements or equipment, the power network elements or equipment not otherwise provided for the elements or equipment being or involving an electric power substation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2300/00—Systems for supplying or distributing electric power characterised by decentralized, dispersed, or local generation
- H02J2300/20—The dispersed energy generation being of renewable origin
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2300/00—Systems for supplying or distributing electric power characterised by decentralized, dispersed, or local generation
- H02J2300/20—The dispersed energy generation being of renewable origin
- H02J2300/22—The renewable source being solar energy
- H02J2300/24—The renewable source being solar energy of photovoltaic origin
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J3/00—Circuit arrangements for ac mains or ac distribution networks
- H02J3/38—Arrangements for parallely feeding a single network by two or more generators, converters or transformers
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J3/00—Circuit arrangements for ac mains or ac distribution networks
- H02J3/38—Arrangements for parallely feeding a single network by two or more generators, converters or transformers
- H02J3/381—Dispersed generators
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
- Y02E10/56—Power conversion systems, e.g. maximum power point trackers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E40/00—Technologies for an efficient electrical power generation, transmission or distribution
- Y02E40/70—Smart grids as climate change mitigation technology in the energy generation sector
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S10/00—Systems supporting electrical power generation, transmission or distribution
- Y04S10/12—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S10/00—Systems supporting electrical power generation, transmission or distribution
- Y04S10/12—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation
- Y04S10/123—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation the energy generation units being or involving renewable energy sources
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S10/00—Systems supporting electrical power generation, transmission or distribution
- Y04S10/30—State monitoring, e.g. fault, temperature monitoring, insulator monitoring, corona discharge
Abstract
【解決手段】電力系統内の複数計測点における計測情報に基づき、電力系統内に設置された制御機器を制御する系統安定化制御装置であって、電力系統に連系される系統設備の情報を格納する設備情報データベースと、系統設備の情報に基づき制御機器の制御優先度を決定する制御優先度決定部と、複数計測地点における計測情報および制御優先度に基づき制御対象を決定する制御対象決定部と、複数計測地点における計測情報から電力系統の不安定化時間を算出する不安定化時間算出部と、不安定化時間および系統設備の情報に基づき制御機器の制御時間を決定する制御時間決定部と、を備えることを特徴とする。
【選択図】図1
Description

11:計測情報収集部
12:動揺検出部
13:制御優先度決定部
14:制御対象決定部
15:不安定化時間算出部
16:制御時間決定部
20:系統計測部
21:計測装置
30:情報記憶部
G:発電機
SS:変電所
C:調相機器
LD:電力負荷
PS:外部電力系統
108:情報通信ネットワーク
200:系統安定化制御装置
Claims (10)
- 電力系統内の複数計測点における計測情報に基づき、電力系統内に設置された制御機器を制御する系統安定化制御装置であって、
前記電力系統に連系される系統設備の情報を格納する設備情報データベースと、前記系統設備の情報に基づき前記制御機器の制御優先度を決定する制御優先度決定部と、前記複数計測地点における計測情報および前記制御優先度に基づき制御対象を決定する制御対象決定部と、前記複数計測地点における計測情報から前記電力系統の不安定化時間を算出する不安定化時間算出部と、前記不安定化時間および前記系統設備の情報に基づき前記制御機器の制御時間を決定する制御時間決定部と、を備えることを特徴とする系統安定化制御装置。 - 請求項1に記載の系統安定化制御装置であって、
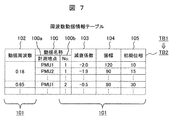
前記不安定化時間算出部は、電力系統の動揺の周波数成分の動揺周波数、減衰係数、及び振幅の少なくとも何れか一つを用いて不安定化時間を算出することを特徴とする系統安定化制御装置。 - 請求項2に記載の系統安定化制御装置であって、
前記系統設備の情報は、前記制御機器を含む系統設備の制御手段、制御可能量、動作時間のうち少なくとも1つを含むことを特徴とする系統安定化制御装置。 - 請求項3に記載の系統安定化制御装置であって、
前記系統設備の情報は、前記複数の計測地点の夫々の緯度及び経度と、前記複数の計測地点の間のトポロジーと、前記複数の計測地点の間のインピーダンスと、前記複数の計測地点の夫々の近傍に連系している電力機器の特性との、少なくとも何れか一つを含む、ことを特徴とする系統安定化制御装置。 - 請求項4に記載の系統安定化制御装置であって、
前記設備情報データベースは、過去の動揺情報を記憶し、前記動揺検出部は、前記計測地点群の状況に対応する前記過去の動揺情報を選択し、前記選択された過去の動揺情報における周波数成分の継続時間に基づいて、動揺影響度を算出することを特徴とすることを特徴とする系統安定化制御装置。 - 請求項1に記載の系統安定化制御装置であって、
前記制御対象決定部は、不安定動揺が観測される計測地点と前記制御機器連系地点との間の電気的距離または前記2地点間インピーダンスを用いて制御対象を決定することを特徴とする系統安定化制御装置。 - 電力系統内の複数計測点における計測情報に基づき、電力系統内に設置された制御機器を制御する系統安定化制御装置であって、
前記電力系統に連系される前記制御機器を含む系統設備の設備情報を格納する設備情報データベースと、前記設備情報に基づき前記制御機器の制御優先度を決定する制御優先度決定部と、前記計測情報から検知した電力系統動揺の動揺計測点と前記制御機器の距離と、前記優先度に応じて制御すべき前記制御機器を決定する制御対象決定部と、前記計測情報から検知した電力系統動揺の不安定化時間を算出する不安定化時間算出部と、前記不安定化時間および前記設備情報に基づき制御時間を決定する制御時間決定部を備え、決定した制御機器に対して決定した制御時間の制御を実行することを特徴とする系統安定化制御装置。
- 電力系統内の複数計測点における計測情報を第1の通信手段を介して系統安定化制御装置に得、前記電力系統を構成する系統設備内の制御機器に対して第2の通信手段を介して前記系統安定化制御装置から制御指令を与える電力系統制御システムであって、
前記系統安定化制御装置は、前記電力系統に連系される系統設備の情報を格納する設備情報データベースと、前記系統設備の情報に基づき前記制御機器の制御優先度を決定する制御優先度決定部と、複数計測地点における計測情報および制御優先度に基づき制御対象を決定する制御対象決定部と、複数計測地点における計測情報から前記電力系統の不安定化時間を算出する不安定化時間算出部と、不安定化時間および前記設備情報に基づき制御時間を決定する制御時間決定部と、前記決定した制御機器と決定した制御時間を含む前記制御指令を前記第2の通信手段を介して与える出力部を備えることを特徴とする電力系統制御システム。 - 請求項8に記載の電力系統制御システムであって、
前記系統安定化制御装置は、前記設備情報に基づき想定動揺を算出する想定動揺算出部と、前記計測情報および前記想定動揺を比較する動揺比較部とを備え、前記制御対象決定部は前記動揺比較結果および制御優先度に基づき制御対象を決定することを特徴とする電力系統制御システム。 - 請求項8または請求項9に記載の電力系統制御システムであって、
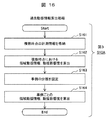
前記系統安定化制御装置の前記出力部に接続されて、前記決定した制御機器と決定した制御時間を含む情報を得る全系統安定化制御装置を備え、
該全系統安定化制御装置は、受信した制御機器および制御時間に基づき追加制御機器および追加制御時間を決定する追加制御決定部と、該追加制御機器および追加制御時間を前記系統設備内の制御機器に対して送信する出力部を備えることを特徴とする電力系統制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015068757A JP6348862B2 (ja) | 2015-03-30 | 2015-03-30 | 系統安定化制御装置および電力系統制御システム |
| US15/555,571 US10461538B2 (en) | 2015-03-30 | 2016-03-04 | System stabilization control device and power system control system |
| PCT/JP2016/056699 WO2016158198A1 (ja) | 2015-03-30 | 2016-03-04 | 系統安定化制御装置および電力系統制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015068757A JP6348862B2 (ja) | 2015-03-30 | 2015-03-30 | 系統安定化制御装置および電力系統制御システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016189664A true JP2016189664A (ja) | 2016-11-04 |
| JP2016189664A5 JP2016189664A5 (ja) | 2017-09-21 |
| JP6348862B2 JP6348862B2 (ja) | 2018-06-27 |
Family
ID=57004516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015068757A Active JP6348862B2 (ja) | 2015-03-30 | 2015-03-30 | 系統安定化制御装置および電力系統制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10461538B2 (ja) |
| JP (1) | JP6348862B2 (ja) |
| WO (1) | WO2016158198A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018154702A1 (ja) * | 2017-02-24 | 2018-08-30 | 株式会社日立製作所 | 電力系統における意思決定支援装置および方法、並びにその応用システム |
| KR20180102903A (ko) * | 2017-03-08 | 2018-09-18 | 엘에스산전 주식회사 | 무효전력 보상 장치 |
| WO2018186001A1 (ja) * | 2017-04-07 | 2018-10-11 | 株式会社日立製作所 | 電力系統安定化装置および電力系統安定化方法 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6397760B2 (ja) * | 2014-12-26 | 2018-09-26 | 株式会社日立製作所 | 電力系統安定化装置および方法 |
| US10860000B2 (en) * | 2015-04-24 | 2020-12-08 | Hitachi, Ltd. | Power system stabilization system and method |
| US10983150B2 (en) | 2017-08-28 | 2021-04-20 | General Electric Technology Gmbh | Systems and methods for detecting and evaluating oscillations in an electrical power grid |
| JP7038011B2 (ja) * | 2018-06-22 | 2022-03-17 | 株式会社日立製作所 | 電力系統運用支援装置および方法、並びに振動抑制システム |
| CN109361264A (zh) * | 2018-09-29 | 2019-02-19 | 广东电网有限责任公司 | 一种双套稳控装置互检控制方法及系统 |
| CN109490622A (zh) * | 2018-11-10 | 2019-03-19 | 王浩 | 一种基于三态信息的电量数据校验技术 |
| CN109698512B (zh) * | 2019-02-19 | 2022-08-30 | 武汉大学 | 一种光伏集中并网系统失步振荡中心迁移特性分析方法 |
| CN110425092B (zh) * | 2019-07-30 | 2020-06-16 | 华北电力大学 | 一种基于能量频谱的风电并网系统振荡源定位系统及方法 |
| CN112633583B (zh) * | 2020-12-29 | 2023-07-11 | 南方电网调峰调频发电有限公司 | 发电机组振动预测方法、装置、计算机设备和存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007288878A (ja) * | 2006-04-14 | 2007-11-01 | Hitachi Ltd | 電力系統安定度判定方法及び装置 |
| JP2011115003A (ja) * | 2009-11-30 | 2011-06-09 | Toshiba Corp | 系統安定化装置 |
| JP2012170169A (ja) * | 2011-02-09 | 2012-09-06 | Tohoku Electric Power Co Inc | 電力系統安定化装置およびその制御方法 |
| JP2013198177A (ja) * | 2012-03-15 | 2013-09-30 | Hitachi Ltd | 電力系統制御装置及び電力系統制御方法 |
| JP2015192591A (ja) * | 2014-03-31 | 2015-11-02 | 株式会社日立製作所 | 系統安定度監視装置及び方法 |
| JP2016067098A (ja) * | 2014-09-24 | 2016-04-28 | 株式会社日立製作所 | 電力系統監視装置および電力系統監視システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0946908A (ja) | 1995-07-28 | 1997-02-14 | Toshiba Corp | 電力系統安定化装置 |
| WO2006090538A1 (ja) * | 2005-02-22 | 2006-08-31 | Kyushu Institute Of Technology | 電力系統の系統安定度制御方法及びシステム |
| JPWO2011118766A1 (ja) * | 2010-03-25 | 2013-07-04 | 三洋電機株式会社 | 電力供給システム、集中管理装置、系統安定化システム、集中管理装置の制御方法および集中管理装置の制御プログラム |
| US20120316696A1 (en) * | 2011-06-08 | 2012-12-13 | Alstom Grid | Multi-level topologytopography for electrical distribution grid control |
-
2015
- 2015-03-30 JP JP2015068757A patent/JP6348862B2/ja active Active
-
2016
- 2016-03-04 WO PCT/JP2016/056699 patent/WO2016158198A1/ja active Application Filing
- 2016-03-04 US US15/555,571 patent/US10461538B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007288878A (ja) * | 2006-04-14 | 2007-11-01 | Hitachi Ltd | 電力系統安定度判定方法及び装置 |
| JP2011115003A (ja) * | 2009-11-30 | 2011-06-09 | Toshiba Corp | 系統安定化装置 |
| JP2012170169A (ja) * | 2011-02-09 | 2012-09-06 | Tohoku Electric Power Co Inc | 電力系統安定化装置およびその制御方法 |
| JP2013198177A (ja) * | 2012-03-15 | 2013-09-30 | Hitachi Ltd | 電力系統制御装置及び電力系統制御方法 |
| JP2015192591A (ja) * | 2014-03-31 | 2015-11-02 | 株式会社日立製作所 | 系統安定度監視装置及び方法 |
| JP2016067098A (ja) * | 2014-09-24 | 2016-04-28 | 株式会社日立製作所 | 電力系統監視装置および電力系統監視システム |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018154702A1 (ja) * | 2017-02-24 | 2018-08-30 | 株式会社日立製作所 | 電力系統における意思決定支援装置および方法、並びにその応用システム |
| JPWO2018154702A1 (ja) * | 2017-02-24 | 2019-06-27 | 株式会社日立製作所 | 電力系統における意思決定支援装置および方法、並びにその応用システム |
| KR20180102903A (ko) * | 2017-03-08 | 2018-09-18 | 엘에스산전 주식회사 | 무효전력 보상 장치 |
| KR102371874B1 (ko) * | 2017-03-08 | 2022-03-08 | 엘에스일렉트릭(주) | 무효전력 보상 장치 |
| WO2018186001A1 (ja) * | 2017-04-07 | 2018-10-11 | 株式会社日立製作所 | 電力系統安定化装置および電力系統安定化方法 |
| JP2018182844A (ja) * | 2017-04-07 | 2018-11-15 | 株式会社日立製作所 | 電力系統安定化装置および電力系統安定化方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10461538B2 (en) | 2019-10-29 |
| US20180054059A1 (en) | 2018-02-22 |
| WO2016158198A1 (ja) | 2016-10-06 |
| JP6348862B2 (ja) | 2018-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6348862B2 (ja) | 系統安定化制御装置および電力系統制御システム | |
| JP6177208B2 (ja) | 電力系統監視装置および電力系統監視システム | |
| JP6205329B2 (ja) | 系統安定度監視装置および系統安定度監視システム | |
| Hayes et al. | A closed-loop state estimation tool for MV network monitoring and operation | |
| Jiang et al. | Projection pursuit: a general methodology of wide-area coherency detection in bulk power grid | |
| Wu et al. | Synchrophasor-based monitoring of critical generator buses for transient stability | |
| WO2019220706A1 (ja) | 電力系統の需給調整監視装置、及び、電力系統の需給調整監視方法 | |
| JP5923454B2 (ja) | 電力系統管理装置、及び方法 | |
| Lashgari et al. | Fast online decision tree-based scheme for predicting transient and short-term voltage stability status and determining driving force of instability | |
| US20150084432A1 (en) | Power System Management Device and Method | |
| JP2016086461A (ja) | 電力系統監視装置および電力系統監視方法 | |
| JP2019216534A (ja) | 電力系統監視システム、電力系統監視方法、およびプログラム | |
| JP6244247B2 (ja) | 系統安定度監視装置及び方法 | |
| US11178610B2 (en) | Adaptive method for aggregation of distributed loads to provide emergency frequency support | |
| Loud et al. | Hydro-Québec's challenges and experiences in on-line DSA applications | |
| US20150253797A1 (en) | Methods for reducing solar inverter output volatility, and related nodes and solar inverters | |
| Zhong et al. | Wind power forecasting and integration to power grids | |
| Wang et al. | An investigation into WAMS-based Under-frequency load shedding | |
| Wu et al. | Monitoring power system transient stability using synchrophasor data | |
| JP6818658B2 (ja) | 電力系統監視システム、電力系統監視方法、及びプログラム | |
| JP2019193387A (ja) | 電力系統監視装置および電力系統監視方法 | |
| Zhou | Online voltage stability prediction and control using computational intelligence technique | |
| BİLGEN | PMU BASED ONLINE GRID VOLTAGE STABILITY ASSESSMENT | |
| JP6996998B2 (ja) | 電力系統監視装置 | |
| Zheng | Power system online stability assessment using synchrophasor data mining |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170809 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180601 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6348862 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |