JP2016003076A - 搬送装置 - Google Patents
搬送装置 Download PDFInfo
- Publication number
- JP2016003076A JP2016003076A JP2014122329A JP2014122329A JP2016003076A JP 2016003076 A JP2016003076 A JP 2016003076A JP 2014122329 A JP2014122329 A JP 2014122329A JP 2014122329 A JP2014122329 A JP 2014122329A JP 2016003076 A JP2016003076 A JP 2016003076A
- Authority
- JP
- Japan
- Prior art keywords
- sheet
- posture
- processing
- unit
- warped
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Abstract
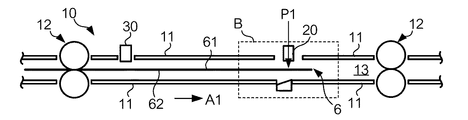
【解決手段】搬送部10は、シートを搬送路13に沿って搬送する。処理部20は、搬送されるシート6の第1面61側に配置されてその第1面61に処理を施す。センサ30は、シートが反っている方向を判定するためのセンサであり、処理位置P1よりも上流側に設けられている。移動部材40は、搬送されるシート6の第2面62側に配置されている。移動部材40は、処理部20との距離を変更可能に支持されている。シートが第2面62側に反っている場合、移動部材40が方向A3に移動し、そのシートが処理部20に近づくように姿勢が変更される。
【選択図】図3
Description
請求項2に係る発明によれば、本発明のように配置された第1及び第2接触領域を有しない場合に比べて、処理部へのシートの衝突を抑制することができる。
請求項3に係る発明によれば、第2面側に反っているシートの姿勢を確実に変更することができる。
請求項4に係る発明によれば、搬送されるシートが実際に反っている方向に基づいてそのシートの姿勢の変更を行うことができる。
請求項5に係る発明によれば、第2面側に反ったシートの先端の姿勢が十分に変更されないということを防止できる。
請求項6に係る発明によれば、シートが反っている方向を判定するためのセンサを設けることができない場合でも、シートが反っている方向を判定することができる。
請求項7に係る発明によれば、シートが第1面側に反っている場合に姿勢変更部が本発明のように動作しない場合に比べて、処理部へのシートの衝突を抑制することができる。
請求項8に係る発明によれば、姿勢変更部がシートの搬送方向に対して垂直な面でシートに接触する場合に比べて、シートの折れ曲がりを抑制することができる。
請求項9に係る発明によれば、第1面側に反っているシートの姿勢を変更しない場合に比べて、搬送中に処理が施される位置におけるシートの姿勢を安定させることができる。
[1−1]構成
図1は、実施形態の搬送装置の全体構成を示す図である。図1では、CPU(Central Processing Unit)2と、RAM(Random Access Memory)3と、ROM(Read Only Memory)4と、記憶部5と、搬送部10と、処理部20と、センサ30とを備える搬送装置1が示されている。CPU2は、RAM3をワークエリアとして用いてROM4や記憶部5に記憶されているプログラムを実行することによって各部を制御する。
図4は、搬送装置1の機能構成の一例を示す図である。搬送装置1は、姿勢変更部50を備える。姿勢変更部50は、搬送部10によって搬送されるシートの姿勢を変更する機能である。姿勢変更部50は、センサ30と移動部材40とを備える。
また、本実施形態では、センサ30の出力に基づいてカール方向の判定が行われる。これにより、搬送されているシートの実際のカール方向に基づいてそのシートの姿勢の変更が行われる。
図8は、搬送装置1の動作を示すフロー図である。搬送装置1は、本実施形態では、シートへの画像の形成が開始されることを契機に動作を開始する。搬送装置1は、まず、画像が形成されたシートの搬送を開始し(ステップS11)、そのシートのカール方向を判定する(ステップS12)。搬送装置1は、アップカールと判定した場合には、移動部材40を図3において実線で示した第1の状態にし(ステップS13)、ダウンカールと判定した場合には、移動部材40を図3において二点鎖線で示した第2の状態にする(ステップS14)。
上述した実施形態は、本発明の実施の一例に過ぎず、以下のように変形させてもよい。また、上述した実施形態及び以下に示す各変形例は、必要に応じてそれぞれ組み合わせて実施してもよい。
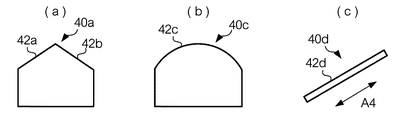
移動部材は、実施形態に示したものに限らない。
図9は、本変形例の移動部材の例を示す図である。図9(a)では、処理部20側に図3に示す第1接触部材14側に傾いた面42aと第3接触部材16側に傾いた面42bとを有する移動部材40aが示されている。実施形態では、搬送方向が一定であったが、搬送装置によっては、搬送方向が反対向きになる場合がある。そのような場合に、移動部材40aであれば、シートがどちらの方向に搬送されてもその先端が処理部20側の面になだらかな角度で衝突し、シートが折れ曲がりにくいようになっている。
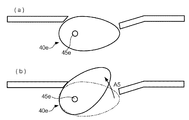
姿勢変更部は、実施形態では移動部材とは異なる部材を用いてシートの姿勢を変更してもよい。
図10は、本変形例で姿勢変更部が用いる部材の一例を示す図である。図10では、軸45eを中心に回転するカム状の回転部材40eが示されている。図10(a)では回転部材40eが第1の状態、すなわち処理部20との距離が最大になった状態が示されている。図10(b)では、図10(a)に示す回転部材40eが方向A5に回転し、第2の状態、すなわち処理部20との距離が最小になった状態が示されている。この場合も、処理位置においてシートが処理部20に近づくように姿勢変更部がシートの姿勢を変更することになり、搬送中に処理が施されるシートの処理位置における姿勢が安定する。
姿勢変更部は、実施形態では1つのセンサを有していたが、2以上のセンサを有していてもよい。センサを増やし、シート及びセンサの距離を測定する箇所を増やすほど、シートのカール方向がより確実に判定されることになる。また、シートが水平方向に沿って搬送されていると、実際には反っていないシートでも重力により鉛直下方に反っていると判定されることがある。そこで、実施形態のように水平方向に沿った搬送路ではなく、鉛直に沿った搬送路にセンサを設けることで、重力の影響を除いたときのカール方向が判定されるようにしてもよい。
姿勢変更部は、実施形態とは異なる方法でカール方向を判定してもよい。
図12は、本変形例の姿勢変更部の構成の一例を示す図である。図12では、図4に示すセンサ30に代えて取得部60を有する姿勢変更部50gが示されている。取得部60は、カール方向(すなわちシートが反っている方向)を表す情報を取得する。カール方向を表す情報とは、例えば、シートの銘柄や温度、湿度、トナー量、シートを反らせるような力が加わる構造(定着器や曲率の大きい搬送路、カールを矯正する装置(いわゆるデカラー))などの情報である。
姿勢変更部は、実施形態では、アップカール時にシートの姿勢を変更しなかったが、これに限らず、アップカール時にもシートの姿勢を変更してもよい。その場合、例えばダウンカール時よりもシートが処理部に近づく度合いを小さくすればよい。実施形態の移動部材40を備える場合であれば、姿勢変更部は、アップカール時に、図3に実線で示す状態よりも方向A3側で且つ二点鎖線で示す状態よりも方向A2側に移動部材40を移動させる。この場合も、移動部材40を第2の状態にする場合に比べれば、シート6の先端63が開口18から飛び出しにくい。
図13は、本変形例の姿勢変更部の構成の一例を示す図である。図13の例では、本変形例の姿勢変更部が備える回転部材70が示されている。回転部材70は、図3に示す第1接触部材14と形が共通しており、上流側の端部に設けられた軸71を中心に回転可能に支持されている。回転部材70は、処理位置P1よりも上流側でシート6の第1面61に接触する第1接触領域R70を有する。
実施形態の移動部材や上記変形例の回転部材は、実施形態のように搬送路を挟んで処理部と対向する位置に設けられてもよいし、それよりも上流側や下流側にずれた位置に設けられてもよい。処理位置におけるシートの姿勢が変更されるのであれば、これらの部材をどの位置に設けてもよい。
姿勢変更部は、カールがない場合、実施形態ではダウンカール時と同様にシートの姿勢の変更を行ったが、これを行わないようにしてもよい。例えば処理部20が配置されている開口が大きくなったり、搬送方向が鉛直方向に近くなって重力による抑えが利かなくなったりした場合には、第2の状態の移動部材40に衝突したシートの先端がその反動で鉛直上向きに跳ね返ってその開口から飛び出すということが起こり得る。そのような場合でも、本変形例によれば、開口からのシートの飛び出しが抑制される。
搬送装置においては、処理部とシートとの間にガラスカバーが設けられてもよい。これにより、シートの先端が処理手段に衝突したり、開口から飛び出したりしなくなる。また、搬送装置においては、第1接触領域R14及び第2接触領域R15によってシートを方向A2に傾けて搬送するため、これらの接触領域が設けられていない場合に比べて、ガラスカバーにシートが衝突しにくく、トナー等によるガラスカバーの汚れが生じにくい。
処理部は、実施形態では画像の読み取りという処理を行ったが、これに限らず、例えば、シートにインクを噴出する処理などを行ってもよい。要するに、処理手段は、媒体の第1面に対して何らかの処理を行うものであればよい。特に、上述したシート距離及びシート角度が処理の結果に影響しやすい場合には、本発明を適用することで、それらの距離及び角度が安定し、処理の精度が向上する。
搬送部は、実施形態では、処理部の前後において概ね水平方向に沿ってシートを搬送したが、これに限らず、例えば鉛直方向に沿って搬送してもよいし、これらの方向に交差する方向(斜めの方向)に沿って搬送してもよい。また、搬送部は、図3等に示した接触領域を有していなくてもよい。
図15は、本変形例の搬送路の一例を示す図である。図15では、搬送路13iに沿ってシートを搬送する搬送部10iが示されている。搬送路13iは、処理部20iが設けられている側に反っている。つまり、搬送路13iは、搬送されるシートの第1面側に反っている。搬送路13iは、弧を描いており、弧の中心に近い方(これを「内側」という)の誘導部材11iとこの中心から離れた方(これを「外側」という)の誘導部材11jとによって形成されている。このように、搬送部10iは、処理位置P1iよりも上流側において、第1面側に反った搬送路13iに沿ってシートを搬送する。そのため、処理位置P1iの前後において、シートの先端が外側の誘導部材11jにシートが衝突しやすい。
本発明は、上述した搬送装置の他に、処理部20による読み取りの結果を出力する検査装置や画像読取装置としても捉えられる。また、処理部がインクをシートに噴出する場合、画像形成装置としても捉えられる。本発明は、搬送されるシートに処理を行うものであって、処理位置におけるシートの姿勢が安定していることが望ましいものであれば、どのような装置に適用されてもよい。
Claims (9)
- シートを搬送路に沿って搬送する搬送部と、
搬送される前記シートの第1面側に配置されて当該第1面に処理を施す処理部と、
搬送される前記シートが第2面側に反っている場合には、前記処理が施される位置において当該シートが前記処理部に近づくように当該シートの姿勢を変更する姿勢変更部と
を備える搬送装置。 - 前記搬送部は、前記位置よりも上流側で前記第1面に接触する第1接触領域と、当該第1接触領域よりも上流側で前記第2面に接触する第2接触領域とを有し、
前記第1接触領域は、第2接触領域よりも、前記位置において前記処理部から前記シートに向かう方向側に配置されている
請求項1に記載の搬送装置。 - 前記姿勢変更部は、搬送される前記シートの前記第2面側に配置されて前記処理部との距離を変更可能に支持されている部材を有し、当該距離を短くして当該部材を前記第2面に接触させることで前記姿勢の変更を行う
請求項1または2に記載の搬送装置。 - 前記姿勢変更部は、前記シートが反っている方向を判定するためのセンサであって、前記位置よりも上流側に設けられたセンサを有し、前記シートが第2面側に反っていることを表す出力を当該センサが行った場合に前記姿勢の変更を行う
請求項1乃至3のいずれか1項に記載の搬送装置。 - 前記センサは、前記姿勢変更部が前記姿勢の変更を行っていない状態から、前記シートが第2面側に反っていることが判定されて当該姿勢の変更を行う状態になるまで、に要する時間で前記シートが搬送される距離よりも前記位置から離れたところに設けられている
請求項4に記載の搬送装置。 - 前記姿勢変更部は、前記シートが反っている方向を表す情報を取得する取得部を有し、前記シートが第2面側に反っていることを表す情報が当該取得部により取得された場合に前記姿勢の変更を行う
請求項1乃至5のいずれか1項に記載の搬送装置。 - 前記姿勢変更部は、搬送される前記シートが前記第1面側に反っている場合には、前記姿勢の変更を行わず、前記シートが前記第2面側に反っている場合に比べて当該シートが前記処理部に近づく度合いを小さくし、または、前記位置において当該シートが前記処理部から遠ざかるように当該シートの姿勢を変更する
請求項1乃至6のいずれか1項に記載の搬送装置。 - 前記姿勢変更部は、搬送されるシートの前記第2面と対向し且つ搬送方向の上流側に傾いた面を有し、当該面を当該シートに接触させて前記姿勢の変更を行う
請求項1乃至7のいずれか1項に記載の搬送装置。 - 搬送されるシートの第1面側に配置されて当該第1面に処理を施す処理部と、
前記処理が施される位置よりも上流側において、前記第1面側に反った搬送路に沿って前記シートを搬送する搬送部と、
搬送される前記シートが前記第1面側に反っている場合には、前記処理が施される位置において当該シートが前記処理部から遠ざかるように当該シートの姿勢を変更する姿勢変更部と
を備える搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122329A JP6405730B2 (ja) | 2014-06-13 | 2014-06-13 | 搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122329A JP6405730B2 (ja) | 2014-06-13 | 2014-06-13 | 搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016003076A true JP2016003076A (ja) | 2016-01-12 |
| JP6405730B2 JP6405730B2 (ja) | 2018-10-17 |
Family
ID=55222659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014122329A Active JP6405730B2 (ja) | 2014-06-13 | 2014-06-13 | 搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6405730B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021178735A (ja) * | 2016-09-23 | 2021-11-18 | 富士フイルムビジネスイノベーション株式会社 | 記録媒体読取装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63219263A (ja) * | 1987-03-06 | 1988-09-12 | Matsushita Graphic Commun Syst Inc | 画像読取装置 |
| JPS63139263U (ja) * | 1987-03-02 | 1988-09-13 | ||
| JPH0449481A (ja) * | 1990-06-19 | 1992-02-18 | Nec Corp | 光学文字読取装置 |
-
2014
- 2014-06-13 JP JP2014122329A patent/JP6405730B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63139263U (ja) * | 1987-03-02 | 1988-09-13 | ||
| JPS63219263A (ja) * | 1987-03-06 | 1988-09-12 | Matsushita Graphic Commun Syst Inc | 画像読取装置 |
| JPH0449481A (ja) * | 1990-06-19 | 1992-02-18 | Nec Corp | 光学文字読取装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021178735A (ja) * | 2016-09-23 | 2021-11-18 | 富士フイルムビジネスイノベーション株式会社 | 記録媒体読取装置 |
| JP7238924B2 (ja) | 2016-09-23 | 2023-03-14 | 富士フイルムビジネスイノベーション株式会社 | 記録媒体読取装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6405730B2 (ja) | 2018-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6164401B2 (ja) | 排紙装置およびこれを有する画像形成装置 | |
| US8844927B2 (en) | Sheet loading apparatus, erasing apparatus, and sheet loading method | |
| JP4518176B2 (ja) | 記録材搬送装置及び画像形成装置 | |
| JP6405730B2 (ja) | 搬送装置 | |
| WO2017002726A1 (ja) | 頁めくり装置 | |
| JP6435788B2 (ja) | 搬送装置 | |
| JP5585705B1 (ja) | 搬送システム | |
| JP2013091098A (ja) | 金属帯の蛇行矯正装置 | |
| US9393805B2 (en) | Printing apparatus comprising a swing guide and conveyance method utilizing said swing guide | |
| US9725267B2 (en) | Conveyance path forming body and conveying machine | |
| JP5920292B2 (ja) | 搬送装置 | |
| JP2019144575A (ja) | 定着装置 | |
| JP6136296B2 (ja) | しわ発生判定装置、画像形成装置、プログラム及びしわ発生判定方法 | |
| US9452904B2 (en) | Guide member and transport device | |
| JP2010228842A (ja) | 画像形成装置 | |
| JP6946685B2 (ja) | 画像形成装置及び画像形成プログラム | |
| JP2018190242A (ja) | 媒体処理装置 | |
| JP6116279B2 (ja) | 画像形成装置 | |
| JP2007169034A (ja) | 用紙搬送装置、及び画像形成装置 | |
| JP6110278B2 (ja) | 媒体処理装置 | |
| JP2016032905A (ja) | 印字装置、ページ捲り方法、及びプログラム | |
| JP2005205706A (ja) | 画像形成装置および方法 | |
| JP5439961B2 (ja) | 磁気情報読取機構 | |
| JP6250373B2 (ja) | 用紙折り装置 | |
| JP2014219433A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170522 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180509 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180806 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180821 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180903 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6405730 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |