JP2015097368A - 振動子、発振器、電子機器および移動体 - Google Patents
振動子、発振器、電子機器および移動体 Download PDFInfo
- Publication number
- JP2015097368A JP2015097368A JP2013237480A JP2013237480A JP2015097368A JP 2015097368 A JP2015097368 A JP 2015097368A JP 2013237480 A JP2013237480 A JP 2013237480A JP 2013237480 A JP2013237480 A JP 2013237480A JP 2015097368 A JP2015097368 A JP 2015097368A
- Authority
- JP
- Japan
- Prior art keywords
- value
- vibration
- vibration element
- vibrator
- package
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images























Landscapes
- Oscillators With Electromechanical Resonators (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
Abstract
【解決手段】振動子1は、パッケージ9と、パッケージ9内に収容され、屈曲振動モードで振動する振動素子2と、を含み、パッケージ9内の気圧は、100Pa以下である。また、振動素子2は、基部4と、基部4と一体的に設けられ、基部から延出している一対の振動腕5、6と、を含み、振動腕5、6は、錘部59、69と、錘部59、69と基部4との間に設けられている腕部50、60と、を含む。
【選択図】図1
Description
また、例えば、特許文献1〜3には、容器内に配置したゲッター材によって、酸素を吸収することにより真空度を改善することが記載されている。
しかしながら、このような従来の振動子では、パッケージ内の真空度を改善する手法が記載されているものの、どの程度の真空度にすればよいか開示されておらず、パッケージ内に収容された振動素子に加わる空気抵抗により、Q値の高い振動素子を得ることができなかった。
[適用例1]
本発明の振動子は、パッケージと、
前記パッケージ内に収容され、屈曲振動モードで振動する振動素子と、
を含み、
前記パッケージ内の気圧は、100Pa以下であることを特徴とする。
これにより、振動素子に加わる空気抵抗に起因したQ値の劣化を低減することができ、Q値を向上させることができる。その結果、優れた振動特性を発揮することができる振動子を提供することができる。
本発明の振動子では、前記パッケージ内の気圧は、10Pa以下であることが好ましい。
これにより、振動素子に加わる空気抵抗に起因したQ値の劣化を、より低減することができ、より優れた振動特性を発揮することができる振動子を提供することができる。
本発明の振動子では、前記パッケージ内の気圧は、7×10−4以上であることが好ましい。
これにより、パッケージ内とパッケージ外との気圧の違いにより生じるパッケージの不本意な反りや撓み、およびこれらに起因するクラック発生等を抑制することもできる。
[適用例4]
本発明の振動子では、前記振動素子は、
基部と、
前記基部から延出されている一対の振動腕と、を含むことが好ましい。
本発明の振動子では、前記振動腕は、
錘部と、
前記錘部と前記基部との間に設けられている腕部と、を含むことが好ましい。
錘部を設けることで、振動腕の全長を抑えつつ、振動腕の先端側の質量を高めることができる。振動腕の全長を抑える、すなわち振動腕の長さを短くすることができることにより、振動腕が屈曲変形したときの、先端部の変位量を小さくすることができ、よって、錘部を設けていない場合と、錘部を設けた状態とで同一の振動周波数、同一の励振パワーで振動している場合には、振動速度を遅くすることができる。これにより、振動素子に加わる空気抵抗をより小さくすることができ、Q値が特に高い振動子を得ることができる。
本発明の振動子では、前記振動腕は、前記振動腕の前記第1方向に沿った長さをL、
前記錘部の前記第1方向に沿った長さをHとしたとき、
0.183≦H/L≦0.597
なる関係を満足していることが好ましい。
これにより、振動素子に加わる空気抵抗をより小さくすることができ、Q値が特に高い振動子を得ることができる。
本発明の振動子では、前記振動腕は、前記振動腕の前記第1の方向に沿った長さをL、
前記錘部の前記第1の方向に沿った長さをHとしたとき、
0.012<H/L<0.30
なる関係を満足していることが好ましい。
これにより、振動素子に加わる空気抵抗をより小さくすることができるとともに、CI値の上昇をより低減することができ、よって、Q値が特に高い振動子を得ることができる。
本発明の発振器は、本発明の振動子と、
回路と、を備えていることを特徴とする。
これにより、高い信頼性を有する発振器が得られる。
[適用例9]
本発明の電子機器は、本発明の振動子を備えていることを特徴とする。
これにより、高い信頼性を有する電子機器が得られる。
[適用例10]
本発明の移動体は、本発明の振動子を備えていることを特徴とする。
これにより、高い信頼性を有する移動体が得られる。
1.振動子
まず、本発明の振動子について説明する。
図1は、本発明の第1実施形態にかかる振動子の平面図である。図2は、図1中のA−A線断面図である。図3は、図1に示す振動子が有する振動素子の平面図である。図4は(a)は、図3中のB−B線断面図、図4(b)は、図3中のC−C線断面図である。図5は、図3に示す振動素子の基部を説明するための部分拡大平面図である。
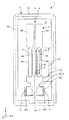
図1および図2に示すように、振動子1は、振動素子2と、振動素子2を収納するパッケージ9とを有している。以下、振動素子2およびパッケージ9ついて、順次詳細に説明する。
図3および図4に示すように、振動素子2は、水晶基板3と、水晶基板3上に形成された第1駆動用電極84および第2駆動用電極85とを有している。なお、図3では、説明の便宜上、第1駆動用電極84および第2駆動用電極85の図示を一部省略している。
水晶基板3は、水晶で構成されており、水晶の結晶軸である、電気軸としてのX軸、機械軸としてのY軸、および光学軸としてのZ軸のうち、X軸を回転軸として、Z軸をY軸の−Y方向へ+Z側が回転するように所定の角度(例えば、15°未満)傾けた軸をZ’軸、Y軸をZ軸の+Z方向へ+Y側が回転するように所定の角度(例えば、15°未満)傾けた軸をY’軸とし、X軸およびY’軸を含む面を主面とし、Z’軸に沿った方向を厚さとする、所謂Zカット水晶板である。このような構成の水晶基板3では、水晶基板3の長手方向をY’軸、短手方向をX軸、さらに厚さ方向をZ’軸と定めることができる。また、本実施形態では、基部4の上面は、水晶の+Z’面であり、基部4の下面は、水晶の−Z’面である。
また、本発明に用いられる水晶基板は、Zカット水晶板に限定されるものではなく、ATカット、BTカット、STカット、CTカット、DTカット、GTカットおよびSCカット等の水晶板を広く適用できることは言うまでもない。
基部4は、X軸およびY’軸に平行な平面であるXY’平面に広がり、Z’軸方向を厚さ方向とする板状をなしている。
基部4は、Z軸方向から見た平面視(以下、単に「平面視」という)で、基部4のY’軸方向の途中の部分がくびれた形状をなしている。すなわち、図3に示すように、基部4は、振動腕5、6が延出している第1基部41と、第1基部41に対して振動腕5、6とは反対側に設けられた第2基部42と、第1基部41と第2基部42とを連結する連結部43と、を含んでいる。なお、図5において、第1基部41と連結部43との境界部、および、第2基部42と連結部43との境界部をそれぞれ破線で示している。
図6(a)は、図3に示す振動素子を模式的に示す平面図(縮幅部を考慮した図)、図6(b)は、(a)に示す振動素子の簡略化モデルを示す平面図である。図7は、図6に示す振動素子の振動漏れ抑制の原理を説明する平面図であって、(a)〜(d)は、基部の各部(第1〜4連結部)の作用を説明する図である。
縮幅部411を振動腕5、6の先端方向と反対側に形成した場合を図6(a)に示す。図6(b)に示したように回転軸155を回転の中心とし、所定の半径Rを有する擬似的な剛体の回転体154に弾性棒151が接続されたものと、回転軸157を回転の中心とし、半径Rを有する擬似的な剛体の回転体156に弾性棒152が接続されたものとが、簡略化された基部168によって接続されているものと見做すことができる。
図7(b)において、簡略化された基部168の代表的な第2の連結部159も同様に、擬似的な剛体の回転体154、156の回転運動によって伸ばされながら弾性棒151、152の先端側の方向に移動する。
図7(d)において、簡略化された基部168の代表的な第4の連結部169の場合は、擬似的な剛体の回転体154、156の回転運動によって圧縮されるが、アーチ形状をしているために変形し難く、更に変形する場合には、第4の連結部169の長さ方向の中央周辺が弾性棒151、152の先端方向とは反対側の方向に変位するように変形する。
結果として、簡略化された基部168に固定部材を形成した場合、即ち、基部167に固定部材を形成した場合、固定部材を介して外部へ漏洩するエネルギーが減少するので、振動漏れを低減させ、Q値の減少を低減することができる。
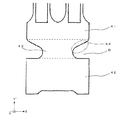
また、振動腕5、6は、腕部50、60と、腕部50、60の先端に設けられた錘部としてのハンマーヘッド(腕部50、60よりもX軸方向に沿った長さが長い広幅な錘部)59、69とを有している。振動腕5、6は、互いに同様の構成(形状、大きさ)をなしている。
なお、前述したように、本実施形態では、腕部50は、一対の主面51、52の双方に溝55、56が設けられていたが、溝は、一対の主面51、52のうちの少なくとも一方の主面に設けられていてもよい。また、本発明において、溝は、必要に応じて設けられていなくてもよい。なお、腕部60についても同様である。
このような第1駆動用電極84と第2駆動用電極85との間に交番電圧を印加すると、振動腕5、6が互いに接近、離間を繰り返すように面内方向(XY’平面方向)に所定の周波数で振動する。
また、振動素子2では、振動腕5、6に溝55、56、65、66を形成することによって、熱弾性損失の低減を図っている。以下、このことについて、振動腕5を例にして具体的に説明する。
fm0=πk/(2ρCpa2)‥‥(1)
なお、πは円周率、kは振動腕5の振動方向の熱伝導率、ρは振動腕5の質量密度、Cpは振動腕5の熱容量、aは振動腕5の振動方向の幅である。式(1)の熱伝導率k、質量密度ρ、熱容量Cpに振動腕5の材料そのもの(すなわち水晶)の定数を入力した場合、求まる熱緩和周波数fm0は、振動腕5に溝55、56を設けていない場合の値となる。
なお、図9において、f/fm<1の領域を等温的領域とも言い、この等温的領域ではf/fmが小さくなるにつれてQ値が高くなる。これは、振動腕の機械的周波数が低くなる(振動腕の振動が遅くなる)につれて前述のような振動腕内の温度差が生じ難くなるためである。したがって、f/fmを0(零)に限りなく近づけた際の極限では、等温準静操作となって、熱弾性損失は限りなく0(零)に接近する。一方、f/fm>1の領域を断熱的領域とも言い、この断熱的領域ではf/fmが大きくなるにつれてQ値が高くなる。これは、振動腕の機械的周波数が高くなるにつれて、各側面の温度上昇・温度低下の切り替わりが高速となり、前述のような熱伝導が生じる時間がなくなるためである。したがって、f/fmを限りなく大きくした際の極限では、断熱操作となって、熱弾性損失は限りなく0(零)に接近する。このことから、f/fm>1の関係を満たすとは、f/fmが断熱的領域にあるとも言い換えることができる。
但し、0.75≦η<1.00
なお、主面52の溝56のX軸方向両側に位置する土手部(部位)52a、52bの幅についても同様の関係を満足している。
なお、前記式(3)は、熱弾性損失のみを考慮したQ値をQTEDとし、そのQTEDが所定値よりも高くなる条件である。
まず、前記式(3)は、QTEDa≧0.65となる条件である。そして、QTEDa≧0.70、QTEDa≧0.75、QTEDa≧0.80、QTEDa≧0.85となる条件は、それぞれ、下記の通りである。
QTEDa≧0.70となる条件は、下記式(4)で示す関係を満足することである。
5.459×10×η2−1.110×102×η+5.859×10≦W≦−4.500×10×η2+9.490×10×η−3.698×10 [μm] ・・・・(4)
但し、0.80≦η<1.00
QTEDa≧0.75となる条件は、下記式(5)で示す関係を満足することである。
6.675×10×η2−1.380×102×η+7.392×10≦W≦−5.805×10×η2+1.228×102×η−5.267×10 [μm] ・・・・(5)
但し、0.85≦η<1.00
QTEDa≧0.80となる条件は、下記式(6)で示す関係を満足することである。
7.752×10×η2−1.634×102×η+8.903×10≦W≦−6.993×10×η2+1.496×102×η−6.844×10 [μm] ・・・・(6)
但し、0.90≦η<1.00
QTEDa≧0.85となる条件は、下記式(7)で示す関係を満足することである。
−1.847×10×η+2.217×10≦W≦1.189×10×η−8.433 [μm] ・・・・(7)
但し、0.95≦η<1.00
QTEDa≧0.90となる条件は、下記式(7´)で示す関係を満足することである。
−3.300×10×η+3.730×10≦W≦3.302×10×η−2.333×10[μm] ・・・・(7´)
但し、0.95≦η<1.00
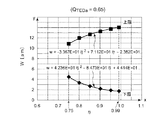
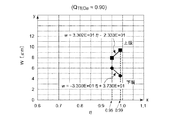
図10は、ウェットエッチングにより形成された振動腕を示す断面図である。図11は、WとQTEDaの関係を示すグラフである。図12〜図17は、それぞれ、ηとWの関係を示すグラフである。
また、図12は、図11において各グラフがQTEDa=0.65とクロスする各点をプロットして得られたグラフであり、QTEDa=0.65(Qmin)である場合におけるηとWの関係を示すグラフである。
W[μm]=4.236×10×η2−8.473×10×η+4.414×10[μm] ・・・・(8)
また、Wの上限値を示すグラフは、下記式(9)で示される。
W[μm]=−3.367×10×η2+7.112×10×η−2.352×10[μm] ・・・・(9)
したがって、図12から、前記式(3)で示す関係を満たすことにより、0.65以上のQTEDaを有する振動素子2が得られることが読み取れる。以上より、式(3)を満足することにより、0.65以上の高いQTEDaが得られ、振動特性に優れた振動素子2となることが証明される。
また、図13は、図11において各グラフがQTEDa=0.70とクロスする各点をプロットして得られたグラフであり、QTEDa=0.70(Qmin)である場合におけるηとWの関係を示すグラフである。
W[μm]=5.459×10×η2−1.110×102×η+5.859×10[μm] ・・・・(10)
また、Wの上限値を示すグラフは、下記式(11)で示される。
W[μm]=−4.500×10×η2+9.490×10×η−3.698×10[μm] ・・・・(11)
したがって、図13から、前記式(4)で示す関係を満たすことにより、0.70以上のQTEDaを有する振動素子2が得られることが読み取れる。以上より、式(4)を満足することにより、0.70以上の高いQTEDaが得られ、振動特性に優れた振動素子2となることが証明される。
また、図14は、図11において各グラフがQTEDa=0.75とクロスする各点をプロットして得られたグラフであり、QTEDa=0.75(Qmin)である場合におけるηとWの関係を示すグラフである。
W[μm]=6.675×10×η2−1.380×102×η+7.392×10[μm] ・・・・(12)
また、Wの上限値を示すグラフは、下記式(13)で示される。
W[μm]=−5.805×10×η2+1.228×102×η−5.267×10[μm] ・・・・(13)
したがって、図14から、前記式(5)で示す関係を満たすことにより、0.75以上のQTEDaを有する振動素子2が得られることが読み取れる。以上より、式(5)を満足することにより、0.75以上の高いQTEDaが得られ、振動特性に優れた振動素子2となることが証明される。
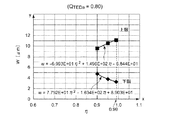
また、図15は、図11において各グラフがQTEDa=0.80とクロスする各点をプロットして得られたグラフであり、QTEDa=0.80(Qmin)である場合におけるηとWの関係を示すグラフである。
W[μm]=7.752×10×η2−1.634×102×η+8.903×10[μm] ・・・・(14)
また、Wの上限値を示すグラフは、下記式(15)で示される。
W[μm]=−6.993×10×η2+1.496×102×η−6.844×10[μm] ・・・・(15)
したがって、図15から、前記式(6)で示す関係を満たすことにより、0.80以上のQTEDaを有する振動素子2が得られることが読み取れる。以上より、式(6)を満足することにより、0.80以上の高いQTEDaが得られ、振動特性に優れた振動素子2となることが証明される。
また、図16は、図11において各グラフがQTEDa=0.85とクロスする各点をプロットして得られたグラフであり、QTEDa=0.85(Qmin)である場合におけるηとWの関係を示すグラフである。
W[μm]=−1.847×10×η+2.217×10[μm] ・・・・(16)
また、Wの上限値を示すグラフは、下記式(17)で示される。
W[μm]=1.189×10×η−8.433[μm] ・・・・(17)
したがって、図16から、前記式(7)で示す関係を満たすことにより、0.85以上のQTEDaを有する振動素子2が得られることが読み取れる。以上より、式(7)を満足することにより、0.85以上の高いQTEDaが得られ、振動特性に優れた振動素子2となることが証明される。
なお、図17は、図11において各グラフがQTEDa=0.90とクロスする各点をプロットして得られたグラフであり、QTEDa=0.90(Qmin)である場合におけるηとWの関係を示すグラフである。
W=−3.300×10×η+3.730×10 [μm] ・・・・(16´)
また、Wの上限値を示すグラフは、下記式(17´)で示される。
W=3.302×10×η−2.333×10 [μm] ・・・・(17´)
したがって、図17から、前記式(7´)で示す関係を満たすことにより、0.90以上のQTEDaを有する振動素子2が得られることが読み取れる。以上より、式(7´)を満足することにより、0.90以上の高いQTEDaが得られ、振動特性に優れた振動素子2となることが証明される。
さらに、振動腕5、6の全長を一定とした場合、振動腕5、6の先端部にハンマーヘッド59、69を設けることにより低下する屈曲振動の共振周波数を、腕部50、60の幅(X軸方向に沿った長さ)を拡げることによって、ハンマーヘッド59、69を設ける前と同一の共振周波数に維持すれば、屈曲振動時に腕部50、60で発生する熱が、腕部50、60のX軸方向に沿って流れるための経路が長くなるので、前述したように、断熱的領域において熱弾性損失を低減することによってQ値を向上させ、それと共にCI値を小さくすることができる。
なお、ハンマーヘッド59、69の表裏主面のうち少なくとも一方には、周波数調整用の錘材料が形成されていてもよい。
また、振動素子2では、振動腕5の全長(Y’軸方向の長さ)をLとし、ハンマーヘッド59の全長(Y’軸方向の長さ)をHとしたとき、振動腕5は、0.183≦H/L≦0.597なる関係を満足していことが好ましい。このような関係を満足することによって、振動素子2に加わる空気抵抗をより小さくすることができ、Q値の更なる向上を図ることができる。
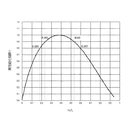
図18は、H/Lと規格化値の関係を示すグラフである。図19は、シミュレーションに用いた振動腕5の形状および大きさを示す斜視図である。図20は、H/Lと高性能化指数1との関係を示すグラフである。
このような振動腕5において、ハンマーヘッド59の長さHを変化させてシミュレーションを行った。なお、発明者らによって、振動腕5のサイズ(L、W、W1、W2、T)を変更しても、下記に示すシミュレーション結果と同様の傾向となることが確認されている。
そこで、振動素子2の小型化と振動特性の向上とを両立するための指数として「高性能化指数1」を設定し、高性能化指数1とH/Lとの関係を図20に示した。なお、[高性能化指数1]は、[低周波化指数]×[高Q値化指数]×[補正値]で表される。また、高性能化指数1は、その中で最大であった数値を1としたときの指数である。また、前記[補正値]は、1本の振動腕5で行ったシミュレーションを、2本の振動腕5、6を有する振動素子2へ適合させるための補正値である。そのため、補正値を用いることで、高性能化指数1をより振動素子2の物性に近づけることができる。
そのため、小型化と振動特性の向上とをさらに両立させた振動素子2を得ることができる。
なお、L≦2μm、好ましくは、L≦1μmとすることで、携帯型音楽機器やICカードのようなものに搭載する発振器に使用する、小型な振動素子を得ることができる。また、W1≦100μm、好ましくは、W1≦50μmとすることで、上記Lの範囲においても、低消費電力を実現する発振回路に使用する、低周波で共振する振動素子を得ることができる。また、断熱的領域であれば、水晶Z板でY’方向に振動腕が延び、X方向に屈曲振動する場合、W1≧12.8μmであることが好ましく、水晶Z板でX方向に振動腕が延び、Y’方向に屈曲振動する場合、W1≧14.4μmであることが好ましく、水晶X板でY’方向に振動腕が延び、Z’方向に屈曲振動する場合、W1≧15.9μmであることが好ましい。こうすることによって、確実に断熱的領域にすることができるので、溝の形成により熱弾性損失が減少してQ値が向上し、それと共に溝が形成されている領域で駆動することにより(電界効率が高く、駆動面積が稼げる)CI値が低くなる。
図21は、実効幅aを説明する斜視図である。図22は、ハンマーヘッド占有率と低R1化指数の関係を示すグラフである。また、下記の表1は、ハンマーヘッド59の長さHを変化させたときのCI値の変化を示す表である。
本シミュレーションでは、次のようにして、各サンプルのCI値を算出している。まず、有限要素法によって、熱弾性損失のみを考慮したQ値を求める。次に、Q値は、周波数依存性を有しているため、求められたQ値を32.768kHz時のQ値(F変換後Q値)に換算する。次に、F変換後Q値に基づいて、R1(CI値)を算出する。なお、Q値が十分に高い場合(例えば1万以上)には、等価直列抵抗R1とクリスタルインピーダンスCIは略等しいので、本発明では同一視している。次に、CI値も周波数依存性を有しているため、求められたR1を32.768kHz時のR1に換算し、その逆数をとって「低R1指数」とした。低R1指数は、全てのシミュレーションの中で最大であった逆数を1としたときの指数である。したがって、低R1指数が1に近い程、CI値が小さいことを意味している。図22(a)に、横軸にハンマーヘッド占有率(H/L)、縦軸に低R1化指数をプロットしたグラフを示し、図22(b)に同図(a)の一部を拡大したグラフを示す。
下記式(18)、(19)を用いて次のような計算を行った。
f0=πk/(2ρCpa2)…(18)
Q={ρCp/(Cα2H)}×[{1+(f/f0)2}/(f/f0)]…(19)
ただし、式(18)、(19)中のπは円周率、kは振動腕5の幅方向の熱電導率、ρは質量密度、Cpは熱容量、Cは振動腕5の長さ方向の伸縮の弾性スティフネス定数、αは振動腕5の長さ方向の熱膨張率、Hは絶対温度、fは固有周波数である。また、aは、振動腕5を図21に示すような平板形状として見做したきの幅(実効幅)である。なお、図21では、振動腕5に溝55、56が形成されていないが、この際のaの値を用いてもF変換後Q値への換算を行うことができる。

以上のような構成の振動素子2は、導電性接着剤11を介してパッケージ9のベース91に固定されている(図2参照)。以下、パッケージ9について説明する。
図1および図2に示すように、パッケージ9は、上面に開放する凹部911を有する箱状のベース91と、凹部911の開口を塞ぐようにベース91に接合されている板状のリッド92とを有している。このようなパッケージ9は、凹部911がリッド92にて塞がれることにより形成された収容空間Aを有しており、この収容空間Aに振動素子2が気密的に収納されている。すなわち、ベース91とリッド92とによって画成された収容空間Aは、振動素子2を収容する収容部として機能している。なお、収容空間A内は、窒素、ヘリウム、アルゴン等の不活性ガスが封入されていてもよい。
また、凹部911には、段差部912が設けられており、振動素子2は、基部4の第2基部42にて、例えば、エポキシ系、アクリル系の樹脂に導電性フィラーを混合した導電性接着剤11を介して段差部912に固定されている。
接続端子951、961、貫通電極および外部端子の構成としては、それぞれ、導電性を有していれば、特に限定されないが、例えば、Cr(クロム)、W(タングステン)などのメタライズ層(下地層)に、Ni(ニッケル)、Au(金)、Ag(銀)、Cu(銅)などの各被膜を積層した金属被膜で構成することができる。
また、パッケージ9内の気圧は、100Pa以下であれば、特に限定されないが、さらに、10Pa以下であることが好ましい。これにより、振動素子2に加わる空気抵抗をさらに小さくすることができ、Q値の更なる向上を図ることができる。
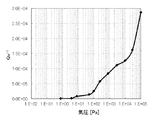
図23は、Qv−1と気圧との関係を検討に用いた振動素子2の形状および大きさを示す平面図である。図24は、Qv−1と気圧との関係を示すグラフである。図25は、等価直列抵抗値R1と気圧との関係を示すグラフである。
本検討は、図23に示すような振動素子2を用い、この振動素子2をパッケージ9内に収容した振動子1を用いた。
Q−1=Qv−1+Q0 −1・・・(20)
式(20)中のQ−1はQ(実測したQ値)の逆数、Q0 −1はQ0(飽和したQ値)の逆数、Qv−1は(各気圧における空気抵抗のみを考慮したQ値)の逆数である。
表2に、各気圧[Pa]におけるQ(実測したQ値)、Qv(空気抵抗のみを考慮したQ値)、およびQv−1(空気抵抗のみを考慮したQ値の逆数)を示す。また、表2を基にして、各気圧[Pa]におけるQv−1をプロットしたものを図24に示す。
また、上記に記載した方法により、今度はパッケージ9内の気圧に対するCI値(R1)[kΩ]を計測した結果をプロットしたものを図25に示す。
また、図17のR1の値からパッケージ内の気圧の下限値としては7×10−4Paであれば十分であり、それ以上に気圧を低下させても、R1の値が飽和していることが観測された。従って、パッケージの封止工程おいては、気圧を7×10−4Paより低下させて真空度を上げていっても、時間的なロスと作業上のコストアップの要因になることが判明した。ゆえに、真空度の程度として、気圧の下限値は7×10−4Paであれば十分であることが分かった。
次いで、本発明の振動子を適用した発振器(本発明の発振器)について説明する。
図26は、本発明の発振器の一例を示す断面図である。
図26に示す発振器10は、振動素子2と、振動素子2を駆動するためのICチップ(チップ部品)80とを有している。以下、発振器10について、前述した振動子との相違点を中心に説明し、同様の事項については、その説明を省略する。
ベース91Aの凹部911Aには、段差部912Aが設けられている。
段差部912Aには、接続端子(図示せず)が形成されている。また、凹部911Aの底面(段差部912Aよりも底側の面)には、ICチップ80が配置されている。ICチップ80は、振動素子2の駆動を制御するための駆動回路(発振回路)を有している。ICチップ80によって振動素子2を駆動すると、所定の周波数の信号を取り出すことができる。
なお、図26の構成では、ICチップ80が収容空間内に配置されている構成について説明したが、ICチップ80の配置は、特に限定されず、例えば、パッケージ9Aの外側(ベースの底面)に配置されていてもよい。
このような発振器10によれば、優れた信頼性を発揮することができる。
次いで、本発明の振動子を適用した電子機器(本発明の電子機器)について、図27〜図29に基づき、詳細に説明する。
図27は、本発明の振動子を備える電子機器を適用したモバイル型(またはノート型)のパーソナルコンピューターの構成を示す斜視図である。この図において、パーソナルコンピューター1100は、キーボード1102を備えた本体部1104と、表示部100を備えた表示ユニット1106とにより構成され、表示ユニット1106は、本体部1104に対しヒンジ構造部を介して回動可能に支持されている。このようなパーソナルコンピューター1100には、フィルター、共振器、基準クロック等として機能する振動子1が内蔵されている。
次いで、本発明の振動子を適用した移動体について、図30に基づき、詳細に説明する。
図30は、本発明の振動子を備える電子機器を適用した移動体(自動車)の構成を示す斜視図である。この図において、移動体1500は、車体1501と、4つの車輪1502とを有しており、車体1501に設けられた図示しない動力源(エンジン)によって車輪1502を回転させるように構成されている。このような移動体1500には、発振器10(振動素子2)が内蔵されている。
このような電子機器によれば、優れた信頼性を発揮することができる。
なお、発明の振動素子を備える移動体は、自動車に限定されず、例えば、オートバイ、鉄道等の他の車両、航空機、船舶、宇宙船等にも適用可能である。
また、振動素子としては、発振器に限定されず、例えば、ジャイロセンサーのようなセンサーにも適用することができる。
Claims (10)
- パッケージと、
前記パッケージ内に収容され、屈曲振動モードで振動する振動素子と、
を含み、
前記パッケージ内の気圧は、100Pa以下であることを特徴とする振動子。 - 前記パッケージ内の気圧は、10Pa以下である請求項1に記載の振動子。
- 前記パッケージ内の気圧は、7×10−4以上である請求項1または2に記載の振動子。
- 前記振動素子は、
基部と、
前記基部から延出されている一対の振動腕と、
を含む請求項1ないし3のうちのいずれか1項に記載の振動子。 - 前記振動腕は、
錘部と、
前記錘部と前記基部との間に設けられている腕部と、を含む請求項1ないし4のうちのいずれか1項に記載の振動子。 - 前記振動腕は、前記振動腕の前記第1方向に沿った長さをL、
前記錘部の前記第1方向に沿った長さをHとしたとき、
0.183≦H/L≦0.597
なる関係を満足している請求項1ないし5のうちのいずれか1項に記載の振動子。 - 前記振動腕は、前記振動腕の前記第1の方向に沿った長さをL、
前記錘部の前記第1の方向に沿った長さをHとしたとき、
0.012<H/L<0.30
なる関係を満足している請求項1ないし5のうちのいずれか1項に記載の振動子。 - 請求項1ないし7のいずれか1項に記載の振動子と、
回路と、
を備えていることを特徴とする発振器。 - 請求項1ないし7のいずれか1項に記載の振動子を備えていることを特徴とする電子機器。
- 請求項1ないし7のいずれか1項に記載の振動子を備えていることを特徴とする移動体。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013237480A JP2015097368A (ja) | 2013-11-16 | 2013-11-16 | 振動子、発振器、電子機器および移動体 |
| TW103139441A TWI634742B (zh) | 2013-11-16 | 2014-11-13 | 振動片、振動子、振盪器、電子機器及移動體 |
| US14/541,759 US9628046B2 (en) | 2013-11-16 | 2014-11-14 | Resonator element, resonator, oscillator, electronic apparatus, and mobile object |
| CN201410646261.0A CN104660207B (zh) | 2013-11-16 | 2014-11-14 | 振动片、振子、振荡器、电子设备以及移动体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013237480A JP2015097368A (ja) | 2013-11-16 | 2013-11-16 | 振動子、発振器、電子機器および移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015097368A true JP2015097368A (ja) | 2015-05-21 |
| JP2015097368A5 JP2015097368A5 (ja) | 2016-12-28 |
Family
ID=53374469
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013237480A Pending JP2015097368A (ja) | 2013-11-16 | 2013-11-16 | 振動子、発振器、電子機器および移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015097368A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018165633A (ja) * | 2017-03-28 | 2018-10-25 | セイコーエプソン株式会社 | センサー素子、センサー、電子機器および移動体 |
| CN112207014A (zh) * | 2019-07-09 | 2021-01-12 | 精工爱普生株式会社 | 振动元件、振子、电子设备以及移动体 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006196932A (ja) * | 2003-05-07 | 2006-07-27 | Seiko Epson Corp | 音叉型圧電デバイスの製造方法および音叉型圧電デバイス |
| JP2009253622A (ja) * | 2008-04-04 | 2009-10-29 | Nippon Dempa Kogyo Co Ltd | 音叉型圧電振動片および圧電デバイス |
| JP2011250225A (ja) * | 2010-05-28 | 2011-12-08 | Nippon Dempa Kogyo Co Ltd | 圧電デバイス、および圧電デバイスの周波数調整方法 |
| JP2012044235A (ja) * | 2010-08-12 | 2012-03-01 | Seiko Epson Corp | 圧電デバイス及び電子機器 |
| JP2012129904A (ja) * | 2010-12-17 | 2012-07-05 | Seiko Epson Corp | 電子機器 |
-
2013
- 2013-11-16 JP JP2013237480A patent/JP2015097368A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006196932A (ja) * | 2003-05-07 | 2006-07-27 | Seiko Epson Corp | 音叉型圧電デバイスの製造方法および音叉型圧電デバイス |
| JP2009253622A (ja) * | 2008-04-04 | 2009-10-29 | Nippon Dempa Kogyo Co Ltd | 音叉型圧電振動片および圧電デバイス |
| JP2011250225A (ja) * | 2010-05-28 | 2011-12-08 | Nippon Dempa Kogyo Co Ltd | 圧電デバイス、および圧電デバイスの周波数調整方法 |
| JP2012044235A (ja) * | 2010-08-12 | 2012-03-01 | Seiko Epson Corp | 圧電デバイス及び電子機器 |
| JP2012129904A (ja) * | 2010-12-17 | 2012-07-05 | Seiko Epson Corp | 電子機器 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018165633A (ja) * | 2017-03-28 | 2018-10-25 | セイコーエプソン株式会社 | センサー素子、センサー、電子機器および移動体 |
| CN112207014A (zh) * | 2019-07-09 | 2021-01-12 | 精工爱普生株式会社 | 振动元件、振子、电子设备以及移动体 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6107333B2 (ja) | 振動子、発振器、電子機器および移動体 | |
| JP5910287B2 (ja) | 振動片、振動子、発振器および電子機器 | |
| JP6349622B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| CN108183698B (zh) | 振动元件、振子、振荡器、电子设备、传感器以及移动体 | |
| JP6281254B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6209886B2 (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| KR20140118840A (ko) | 진동 소자, 진동자, 발진기, 전자 기기 및 이동체 | |
| JP2014200051A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6375622B2 (ja) | 振動片、振動子、発振器、電子機器、センサーおよび移動体 | |
| TW201526542A (zh) | 振動元件、振動子、振盪器、電子機器及移動體 | |
| JP6287208B2 (ja) | 振動子、発振器、電子機器、物理量センサーおよび移動体 | |
| JP2014200050A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2015149591A (ja) | 振動素子、振動子、発振器、電子機器、センサー、および移動体 | |
| JP2015023422A (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP2015097368A (ja) | 振動子、発振器、電子機器および移動体 | |
| JP2015149592A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2015002556A (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP7439852B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6521148B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014107603A (ja) | 振動片、振動子、発振器および電子機器 | |
| JP6614227B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6340774B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6816805B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2018061286A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2019115079A (ja) | 振動素子、振動子、発振器、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180118 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180619 |