JP2015002548A - 振動素子、振動子、発振器、電子機器および移動体 - Google Patents
振動素子、振動子、発振器、電子機器および移動体 Download PDFInfo
- Publication number
- JP2015002548A JP2015002548A JP2013127980A JP2013127980A JP2015002548A JP 2015002548 A JP2015002548 A JP 2015002548A JP 2013127980 A JP2013127980 A JP 2013127980A JP 2013127980 A JP2013127980 A JP 2013127980A JP 2015002548 A JP2015002548 A JP 2015002548A
- Authority
- JP
- Japan
- Prior art keywords
- base
- vibration element
- arm
- vibrating arm
- vibrating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000007423 decrease Effects 0.000 claims description 7
- 230000010355 oscillation Effects 0.000 claims description 4
- 230000000452 restraining effect Effects 0.000 abstract 1
- 239000000853 adhesive Substances 0.000 description 21
- 230000001070 adhesive effect Effects 0.000 description 21
- 239000010453 quartz Substances 0.000 description 19
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 19
- 239000000758 substrate Substances 0.000 description 16
- 230000000694 effects Effects 0.000 description 15
- 238000005452 bending Methods 0.000 description 13
- 239000013078 crystal Substances 0.000 description 12
- 238000006073 displacement reaction Methods 0.000 description 11
- 239000010931 gold Substances 0.000 description 9
- 239000011651 chromium Substances 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 8
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 8
- 239000000470 constituent Substances 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 6
- 238000003384 imaging method Methods 0.000 description 5
- 238000000926 separation method Methods 0.000 description 5
- 239000010949 copper Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 229910052709 silver Inorganic materials 0.000 description 4
- 239000004332 silver Substances 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 3
- 230000004308 accommodation Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 229910052737 gold Inorganic materials 0.000 description 3
- 239000007769 metal material Substances 0.000 description 3
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 241000251131 Sphyrna Species 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 229910052804 chromium Inorganic materials 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 229910052759 nickel Inorganic materials 0.000 description 2
- 239000010955 niobium Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000035882 stress Effects 0.000 description 2
- 239000010936 titanium Substances 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- XQUPVDVFXZDTLT-UHFFFAOYSA-N 1-[4-[[4-(2,5-dioxopyrrol-1-yl)phenyl]methyl]phenyl]pyrrole-2,5-dione Chemical compound O=C1C=CC(=O)N1C(C=C1)=CC=C1CC1=CC=C(N2C(C=CC2=O)=O)C=C1 XQUPVDVFXZDTLT-UHFFFAOYSA-N 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- 229910001316 Ag alloy Inorganic materials 0.000 description 1
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 229910001020 Au alloy Inorganic materials 0.000 description 1
- 229910000599 Cr alloy Inorganic materials 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 229910000990 Ni alloy Inorganic materials 0.000 description 1
- 239000004642 Polyimide Substances 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000000788 chromium alloy Substances 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 239000011231 conductive filler Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- 239000003353 gold alloy Substances 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- AMGQUBHHOARCQH-UHFFFAOYSA-N indium;oxotin Chemical compound [In].[Sn]=O AMGQUBHHOARCQH-UHFFFAOYSA-N 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 229910000833 kovar Inorganic materials 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910052758 niobium Inorganic materials 0.000 description 1
- GUCVJGMIXFAOAE-UHFFFAOYSA-N niobium atom Chemical compound [Nb] GUCVJGMIXFAOAE-UHFFFAOYSA-N 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 229920003192 poly(bis maleimide) Polymers 0.000 description 1
- 229920000728 polyester Polymers 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- VSZWPYCFIRKVQL-UHFFFAOYSA-N selanylidenegallium;selenium Chemical compound [Se].[Se]=[Ga].[Se]=[Ga] VSZWPYCFIRKVQL-UHFFFAOYSA-N 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- -1 silver halide Chemical class 0.000 description 1
- JBQYATWDVHIOAR-UHFFFAOYSA-N tellanylidenegermanium Chemical compound [Te]=[Ge] JBQYATWDVHIOAR-UHFFFAOYSA-N 0.000 description 1
- 230000002277 temperature effect Effects 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03B—GENERATION OF OSCILLATIONS, DIRECTLY OR BY FREQUENCY-CHANGING, BY CIRCUITS EMPLOYING ACTIVE ELEMENTS WHICH OPERATE IN A NON-SWITCHING MANNER; GENERATION OF NOISE BY SUCH CIRCUITS
- H03B5/00—Generation of oscillations using amplifier with regenerative feedback from output to input
- H03B5/30—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator
- H03B5/32—Generation of oscillations using amplifier with regenerative feedback from output to input with frequency-determining element being electromechanical resonator being a piezoelectric resonator
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/0538—Constructional combinations of supports or holders with electromechanical or other electronic elements
- H03H9/0547—Constructional combinations of supports or holders with electromechanical or other electronic elements consisting of a vertical arrangement
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/10—Mounting in enclosures
- H03H9/1007—Mounting in enclosures for bulk acoustic wave [BAW] devices
- H03H9/1014—Mounting in enclosures for bulk acoustic wave [BAW] devices the enclosure being defined by a frame built on a substrate and a cap, the frame having no mechanical contact with the BAW device
- H03H9/1021—Mounting in enclosures for bulk acoustic wave [BAW] devices the enclosure being defined by a frame built on a substrate and a cap, the frame having no mechanical contact with the BAW device the BAW device being of the cantilever type
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/15—Constructional features of resonators consisting of piezoelectric or electrostrictive material
- H03H9/21—Crystal tuning forks
Landscapes
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
- Oscillators With Electromechanical Resonators (AREA)
Abstract
Description
特許文献1の図1に記載の振動素子は、基部と、基部から並んで延出する1対の振動腕とを有しており、基部に設けられた2つの固定部にて導電性接着材を介してパッケージに固定されている。しかしながら、このような構成では、振動素子の小型化に伴う基部の小型化によって、電気的導通と固定を図るために基部に配置される2つの固定部が近接しているため接触し、短絡が発生するおそれがある。
[適用例1]
本発明の振動素子は、互いに直交する方向を第1方向および第2方向としたとき、
基部と、
前記基部と一体に設けられ、前記基部の一方の端部から前記第1方向に延出している第1振動腕と、
前記基部と一体に設けられ、前記第1振動腕と前記第2方向に並び、前記基部の前記一方の端部から前記第1方向に延出している第2振動腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部から前記第1方向に延出し、前記第1振動腕と前記第2振動腕との間に位置している保持腕と、
を含み、
前記基部の一方の主面には第1固定部が設けられ、
前記保持腕の一方の主面には第2固定部が設けられ、
前記第1固定部および前記第2固定部にて固定部材を介して対象物に固定されることを特徴とする。
これにより、対象物へ搭載した状態での固定部材同士の接触を低減することのできる振動素子となる。さらに、振動漏れも低減することのできる振動子となる。
本発明の振動素子は、互いに直交する方向を第1方向および第2方向としたとき、
基部と、
前記基部と一体に設けられ、前記基部の一方の端部から前記第1方向に延出している第1振動腕と、
前記基部と一体に設けられ、前記第1振動腕と前記第2方向に並び、前記基部の前記一方の端部から前記第1方向に延出している第2振動腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部とは反対側の他方の端部から前記第1方向に延出している保持腕と、
を含み、
前記基部の一方の主面には第1固定部が設けられ、
前記保持腕の一方の主面には第2固定部が設けられ、
前記第1固定部および前記第2固定部にて固定部材を介して対象物に固定されることを特徴とする。
これにより、対象物へ搭載した状態での固定部材同士の接触を低減することのできる振動素子となる。さらに、振動漏れも低減することのできる振動子となる。
本発明の振動素子では、
前記第1固定部は、
前記基部の前記一方の主面の前記第2方向の中心点と交わり、前記第1方向と平行な直線上の一点を含むようにしていることが好ましい。
このような位置は、基部の中でも振動が小さい場所である。そのため、このような位置に第1固定部を設けることによって、振動漏れがより低減された振動素子となる。
本発明の振動素子は、互いに直交する方向を第1方向および第2方向としたとき、
基部と、
前記基部と一体に設けられ、前記基部の一方の端部から前記第1方向に延出している第1振動腕と、
前記基部と一体に設けられ、前記第1振動腕と前記第2方向に並び、前記基部の前記一方の端部から前記第1方向に延出している第2振動腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部から前記第1方向に延出し、前記第1振動腕と前記第2振動腕との間に位置している第1保持腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部とは反対側の他方の端部から延出している第2保持腕と、
を含み、
前記第1保持腕の一方の主面には、第1固定部が設けられ、
前記第2保持腕の一方の主面には、第2固定部が設けられ、
前記第1固定部および前記第2固定部にて固定部材を介して対象物に固定されることを特徴とする。
これにより、対象物へ搭載した状態での固定部材同士の接触を低減することのできる振動素子となる。さらに、振動漏れも低減することのできる振動子となる。
本発明の振動素子は、
前記基部は、前記第1振動腕と前記第2振動腕との間に位置し、前記第2の方向に沿った長さが、前記第1振動腕と前記第2振動腕との間の中心線に沿って、前記他端から離れるに従って連続的または段階的に減少している縮幅部を含むことを特徴とする。
これにより、振動漏れが低減される。
本発明の振動子は、本発明の振動素子と、
前記振動素子が搭載されているパッケージと、
を含むことを特徴とする。
これにより、高い信頼性を有する振動子が得られる。
本発明の発振器は、本発明の振動素子と、
発振回路と、
を備えていることを特徴とする。
これにより、高い信頼性を有する発振器が得られる。
本発明の電子機器は、本発明の振動素子を備えていることを特徴とする。
これにより、高い信頼性を有する電子機器が得られる。
[適用例9]
本発明の移動体は、本発明の振動素子を備えていることを特徴とする。
これにより、高い信頼性を有する移動体が得られる。
1.振動子
まず、本発明の振動子について説明する。
<第1実施形態>
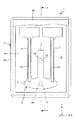
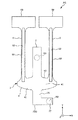
図1は、本発明の第1実施形態にかかる振動子の平面図である。図2は、図1中のA−A線断面図である。図3は、図1に示す振動子が有する振動素子の上面図である。図4は、図3に示す振動素子の機能を説明するための平面図である。図5は、図3中のB−B線断面図である。図6は、図3に示す振動素子の裏面図である。図7は、屈曲振動時の熱伝導について説明する振動腕の断面図である。図8は、Q値とf/fmの関係を示すグラフである。なお、以下では、説明の便宜上、図1に示すように、互いに直交する3軸をX軸(水晶の電気軸)、Y軸(水晶の機械軸)およびZ軸(水晶の光学軸)とする。また、図2中の上側を「上(表)」とし、下側を「下(裏)」とする。また、図3中の上側を「先端」とし、下側を「基端」とする。
図1に示すように、振動子1は、振動素子(本発明の振動素子)2と、振動素子2を収納するパッケージ9とを有している。
図1および図2に示すように、パッケージ9は、上面に開放する凹部911を有する箱状のベース91と、凹部911の開口を塞いでベース91に接合されている板状のリッド92とを有している。パッケージ9は、凹部911がリッド92で塞がれることで形成された収容空間Sを有し、この収容空間Sに振動素子2を気密的に収容している。収容空間S内は、減圧(好ましくは真空)状態となっていてもよいし、窒素、ヘリウム、アルゴン等の不活性ガスが封入されていてもよい。
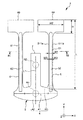
図3ないし図5に示すように、振動素子2は、水晶基板3と、水晶基板3上に形成された電極8と、を有している。
水晶基板3は、Zカット水晶板で構成されている。Zカット水晶板とは、Z軸を厚さ方向とする水晶基板である。なお、Z軸は、水晶基板3の厚さ方向と一致しているのが好ましいが、常温近傍における周波数温度変化を小さくする観点から、厚さ方向に対して若干(例えば、15°未満程度)傾けてもよい。
基部4は、XY平面に広がりを有し、Z軸方向に厚さを有する略板状をなしている。基部4は、振動腕5、6を支持・連結する部分(本体部41)と、振動漏れを低減する縮幅部42、43とを有している。
具体的に説明すると次のようになる。なお、説明を簡単にするために、振動素子2の形状は、Y軸に平行な所定の軸に対して対称であるとする。
振動腕5、6は、X軸方向(第2方向)に並び、かつ、互いに平行となるように基部4の先端から+Y軸方向(第1方向)に延出している。振動腕5、6は、それぞれ、長手形状をなしており、その基端が固定端となり、先端が自由端となっている。
また、振動腕5、6は、腕部51、61と、腕部51、61の先端に設けられたハンマーヘッド59、69とを有している。なお、振動腕5、6は、互いに同様の構成であるため、以下では、振動腕5について代表して説明し、振動腕6については、その説明を省略する。
また、ハンマーヘッド59のX軸方向中心を振動腕5のX軸方向中心から多少ずらしてもよい。こうすることによって、屈曲振動時に振動腕5が捩れることによって生じてしまう基部4のZ軸方向の振動を低減することができるので、振動漏れを抑制することができる。
以上、水晶基板3の外形について説明した。図2、図3および図6に示すように、このような水晶基板3は、第1固定部R1と、第2固定部R2とを有しており、これら第1、第2固定部R1、R2にて、導電性接着材11、12を介してベース91(パッケージ9)に固定されている。
電極8は、第1駆動用電極84と、第2駆動用電極85と、第1駆動用電極84と接続されている第1接続電極81と、第2駆動用電極85と接続されている第2接続電極82とを有している。
以上、振動素子2について説明した。前述したように、振動素子2は、振動腕5、6に溝52、53、62、63を設けることによって、熱弾性損失の低減を図っている。以下、このことについて、振動腕5を例にして具体的に説明する。
また、平板構造(断面形状が矩形の構造)の熱緩和周波数をfm0とすれば、fm0は下式で求めることができる。
fm0=πk/(2ρCpa2)‥‥(1)
なお、図8において、f/fm<1の領域を等温的領域とも言い、この等温的領域ではf/fmが小さくなるにつれてQ値が高くなる。これは、振動腕の機械的周波数が低くなる(振動腕の振動が遅くなる)につれて前述のような振動腕内の温度差が生じ難くなるためである。したがって、f/fmを0(零)に限りなく近づけた際の極限では、等温準静操作となって、熱弾性損失は限りなく0(零)に接近する。一方、f/fm>1の領域を断熱的領域とも言い、この断熱的領域ではf/fmが大きくなるにつれてQ値が高くなる。これは、振動腕の機械的周波数が高くなるにつれて、各側面の温度上昇・温度効果の切り替わりが高速となり、前述のような熱伝導が生じる時間がなくなるためである。したがって、f/fmを限りなく大きくした際の極限では、断熱操作となって、熱弾性損失は限りなく0(零)に接近する。このことから、f/fm>1の関係を満たすとは、f/fmが断熱的領域にあるとも言い換えることができる。
次に、本発明の振動子の第2実施形態について説明する。
図9は、本発明の第2実施形態にかかる振動子が有する振動素子の上面図である。
以下、第2実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図9に示すように、振動素子2Aの基部4Aは、前述の第1実施形態の基部4から縮幅部42、43が省略され、本体部41のみで構成されている。このような構成とすることによって、例えば、前述した第1実施形態の振動素子2と比較して、振動素子の全長を短くすることができる。
このような第2実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
次に、本発明の振動子の第3実施形態について説明する。
図10は、本発明の第3実施形態にかかる振動子が有する振動素子の上面図である。
以下、第3実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図10に示すように、振動素子2Bの保持腕7Bは、その基端部に、先端側よりも幅(X軸方向の長さ)が狭い狭幅部71を有している。そして、第2固定部R2は、保持腕7の狭幅部71よりも先端側に位置する領域に設けられている。狭幅部71を有することによって、X同相モード(不要振動モード)の共振周波数をX逆相モード(メインモード)の共振周波数から遠ざけることができる。そのため、メインモードの振動に不要振動が混在するのを低減することができ、振動素子2Bは、優れた振動特性を発揮することができる。狭幅部71の幅W5としては、特に限定されないが、よれより先端側の部分の幅W4の20%以上、50%以下であることが好ましい。これにより、上述の効果がより向上するとともに、基部4の振動が保持腕7Bにより伝達され難くなる。
このような第3実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
次に、本発明の振動子の第4実施形態について説明する。
図11は、本発明の第4実施形態にかかる振動子が有する振動素子の上面図である。
以下、第4実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図11に示すように、振動素子2Cの保持腕7Cは、基部4の基端(他方の端部)から−Y軸方向に向けて延出している。そして、この保持腕7Cの一方の主面(−Z軸側の主面)に第2固定部R2が設けられている。
このような第4実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
次に、本発明の振動子の第5実施形態について説明する。
図12は、本発明の第5実施形態にかかる振動子が有する振動素子の上面図である。
以下、第5実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図12に示すように、振動素子2Dの保持腕7Dは、基部4の基端(他方の端部)から−Y軸方向に向けて延出している。また、保持腕7Dは、基部4側の端部に、基端側よりも幅(X軸方向の長さ)が狭い狭幅部75を有している。そして、第2固定部R2は、保持腕7Dの狭幅部75よりも基端側に位置する領域に設けられている。狭幅部75を有することによって、X同相モード(不要振動モード)の共振周波数をX逆相モード(メインモード)の共振周波数から遠ざけることができる。そのため、メインモードの振動に不要振動が混在するのを低減することができ、振動素子2Dは、優れた振動特性を発揮することができる。
このような第5実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
次に、本発明の振動子の第6実施形態について説明する。
図13は、本発明の第6実施形態にかかる振動子が有する振動素子の上面図である。
以下、第6実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図13に示すように、振動素子2Eの保持腕7Eは、基部4の基端から−Y軸方向に向けて延出する第1部分72と、第1部分72からX軸方向に延在する第2部分73とを有している。そして、第2部分73の一方の主面(−Z軸側の主面)に第2固定部R2が設けられている。保持腕7をこのような構成とすることで、例えば、前述した第4、第5実施形態と比較して、振動素子2EのY軸方向の全長が長くなることなく、基部4(第1固定部R1)と第2固定部R2との離間距離を大きくすることができる。そのため、第1、第2固定部R1、R2をより離間させることができるとともに、基部4から第2固定部R2への振動の伝達をより低減することができる。
このような第6実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
次に、本発明の振動子の第7実施形態について説明する。
図14は、本発明の第7実施形態にかかる振動子が有する振動素子の上面図である。
以下、第7実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図14に示すように、振動素子2Fは、基部4と、基部4の先端から+Y軸方向に延出する一対の振動腕5、6と、基部4の先端から+Y軸方向に延出する保持腕(第1保持腕)7と、基部4の基端から−Y軸方向に延出する保持腕(第2保持腕)70とを有している。これら基部4、振動腕5、6、保持腕7、70は、水晶基板3から一体に形成されている。
このような第7実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
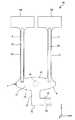
次に、本発明の振動子の第8実施形態について説明する。
図15は、本発明の第8実施形態にかかる振動子が有する振動素子の上面図である。
以下、第8実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図15に示すように、振動素子2Gは、基部4と、基部4の先端から+Y軸方向に延出する一対の振動腕5、6と、基部4の先端から+Y軸方向に延出する保持腕(第1保持腕)7と、基部4の基端から−Y軸方向に延出する保持腕(第2保持腕)70Gとを有している。これら基部4、振動腕5、6、保持腕7、70Gは、水晶基板3から一体に形成されている。また、保持腕70Gは、基部4の基端から−Y軸方向に向けて延出する第1部分76と、第1部分72からX軸方向に延在する第2部分77とを有している。そして、保持腕7の一方の主面(−Z軸側の主面)に第1固定部R1が設けられており、第2部分77の一方の主面(−Z軸側の主面)に第2固定部R2が設けられている。保持腕70Gをこのような構成とすることで、例えば、前述した第6実施形態と比較して、振動素子2GのY軸方向の全長が長くなることなく、第1、第2固定部R1、R2の離間距離を大きくすることができる。
このような第8実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
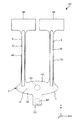
次に、本発明の振動子の第9実施形態について説明する。
図16は、本発明の第9実施形態にかかる振動子が有する振動素子の上面図である。
以下、第9実施形態の振動子について、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
図16に示すように、振動素子2Hは、基部4と、基部4の先端から+Y軸方向に延出する一対の振動腕5、6と、基部4の先端から+Y軸方向に延出する保持腕(第1保持腕)7と、基部4の基端から−Y軸方向に延出する保持腕(第2保持腕)70Hとを有している。これら基部4、振動腕5、6、保持腕7、70Hは、水晶基板3から一体に形成されている。また、保持腕70Hは、基部4の基端から延出し、X軸方向に分岐する分岐部781と、分岐部781からX軸方向両側に延出する連結腕782、783と、連結腕782、783の先端部からY軸方向の振動腕5、6側に延出する腕部784、785とを有している。そして、保持腕7の一方の主面(−Z軸側の主面)に第1固定部R1が設けられており、腕部784、785の一方の主面(−Z軸側の主面)にそれぞれ第2固定部R2が設けられている。なお、本実施形態の場合は、2つの第2固定部R2のうちのいずれか一方に第2接続電極82が設けられていればよい。
このような第9実施形態によっても、前述した第1実施形態と同様の効果を奏することができる。
次に、本発明の振動素子を適用した発振器(本発明の発振器)について説明する。
図17は、本発明の発振器の好適な実施形態を示す断面図である。
図17に示す発振器100は、振動子1と、振動素子2を駆動するためのICチップ110とを有している。以下、発振器100について、前述した振動子との相違点を中心に説明し、同様の事項については、その説明を省略する。
次に、本発明の振動素子を適用した電子機器(本発明の電子機器)について説明する。
図18は、本発明の振動素子を備える電子機器を適用したモバイル型(またはノート型)のパーソナルコンピューターの構成を示す斜視図である。この図において、パーソナルコンピューター1100は、キーボード1102を備えた本体部1104と、表示部2000を備えた表示ユニット1106とにより構成され、表示ユニット1106は、本体部1104に対しヒンジ構造部を介して回動可能に支持されている。このようなパーソナルコンピューター1100には、フィルター、共振器、基準クロック等として機能する振動素子2が内蔵されている。
次に、本発明の振動素子を適用した移動体(本発明の移動体)について説明する。
図21は、本発明の移動体の一例としての自動車を概略的に示す斜視図である。自動車1500には、振動素子2が搭載されている。振動素子2は、キーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム、等の電子制御ユニット(ECU:electronic control unit)に広く適用できる。
以上、本発明の振動素子、振動子、発振器、電子機器および移動体について、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。また、各実施形態を適宜組み合わせてもよい。
Claims (9)
- 互いに直交する方向を第1方向および第2方向としたとき、
基部と、
前記基部と一体に設けられ、前記基部の一方の端部から前記第1方向に延出している第1振動腕と、
前記基部と一体に設けられ、前記第1振動腕と前記第2方向に並び、前記基部の前記一方の端部から前記第1方向に延出している第2振動腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部から前記第1方向に延出し、前記第1振動腕と前記第2振動腕との間に位置している保持腕と、
を含み、
前記基部の一方の主面には第1固定部が設けられ、
前記保持腕の一方の主面には第2固定部が設けられ、
前記第1固定部および前記第2固定部にて固定部材を介して対象物に固定されることを特徴とする振動素子。 - 互いに直交する方向を第1方向および第2方向としたとき、
基部と、
前記基部と一体に設けられ、前記基部の一方の端部から前記第1方向に延出している第1振動腕と、
前記基部と一体に設けられ、前記第1振動腕と前記第2方向に並び、前記基部の前記一方の端部から前記第1方向に延出している第2振動腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部とは反対側の他方の端部から前記第1方向に延出している保持腕と、
を含み、
前記基部の一方の主面には第1固定部が設けられ、
前記保持腕の一方の主面には第2固定部が設けられ、
前記第1固定部および前記第2固定部にて固定部材を介して対象物に固定されることを特徴とする振動素子。 - 請求項1または2において、
前記第1固定部は、
前記基部の前記一方の主面の前記第2方向の中心点と交わり、前記第1方向と平行な直線上の一点を含むようにしている振動素子。 - 互いに直交する方向を第1方向および第2方向としたとき、
基部と、
前記基部と一体に設けられ、前記基部の一方の端部から前記第1方向に延出している第1振動腕と、
前記基部と一体に設けられ、前記第1振動腕と前記第2方向に並び、前記基部の前記一方の端部から前記第1方向に延出している第2振動腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部から前記第1方向に延出し、前記第1振動腕と前記第2振動腕との間に位置している第1保持腕と、
前記基部と一体に設けられ、前記基部の前記一方の端部とは反対側の他方の端部から延出している第2保持腕と、
を含み、
前記第1保持腕の一方の主面には、第1固定部が設けられ、
前記第2保持腕の一方の主面には、第2固定部が設けられ、
前記第1固定部および前記第2固定部にて固定部材を介して対象物に固定されることを特徴とする振動素子。 - 請求項1ないし4のいずれか1項において、
前記基部は、前記第1振動腕と前記第2振動腕との間に位置し、前記第2の方向に沿った長さが、前記第1振動腕と前記第2振動腕との間の中心線に沿って、前記他端から離れるに従って連続的または段階的に減少している縮幅部を含むことを特徴とする振動素子。 - 請求項1ないし5のいずれか1項に記載の振動素子と、
前記振動素子が搭載されているパッケージと、
を含むことを特徴とする振動子。 - 請求項1ないし5のいずれか1項に記載の振動素子と、
発振回路と、
を備えていることを特徴とする発振器。 - 請求項1ないし5のいずれか1項に記載の振動素子を備えていることを特徴とする電子機器。
- 請求項1ないし5のいずれか1項に記載の振動素子を備えていることを特徴とする移動体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013127980A JP2015002548A (ja) | 2013-06-18 | 2013-06-18 | 振動素子、振動子、発振器、電子機器および移動体 |
| CN201410270270.4A CN104242858A (zh) | 2013-06-18 | 2014-06-17 | 振动元件、振子、振荡器、电子设备以及移动体 |
| US14/307,999 US20140368287A1 (en) | 2013-06-18 | 2014-06-18 | Resonator element, resonator, oscillator, electronic device, and moving object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013127980A JP2015002548A (ja) | 2013-06-18 | 2013-06-18 | 振動素子、振動子、発振器、電子機器および移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015002548A true JP2015002548A (ja) | 2015-01-05 |
| JP2015002548A5 JP2015002548A5 (ja) | 2016-08-04 |
Family
ID=52018731
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013127980A Withdrawn JP2015002548A (ja) | 2013-06-18 | 2013-06-18 | 振動素子、振動子、発振器、電子機器および移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20140368287A1 (ja) |
| JP (1) | JP2015002548A (ja) |
| CN (1) | CN104242858A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11804820B2 (en) | 2020-04-27 | 2023-10-31 | Murata Manufacturing Co., Ltd. | Resonator and resonance device |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI634742B (zh) * | 2013-11-16 | 2018-09-01 | 精工愛普生股份有限公司 | 振動片、振動子、振盪器、電子機器及移動體 |
| WO2016158045A1 (ja) * | 2015-03-31 | 2016-10-06 | 株式会社村田製作所 | 共振子 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52129395A (en) * | 1976-04-23 | 1977-10-29 | Seiko Instr & Electronics Ltd | Tuner fork type peizoelectric resonatpr |
| JPS5694813A (en) * | 1979-12-27 | 1981-07-31 | Seiko Instr & Electronics Ltd | Tuning fork type piezoelectric oscillator |
| JPS58170110A (ja) * | 1982-03-30 | 1983-10-06 | Citizen Watch Co Ltd | 水晶振動子 |
| JP2004343541A (ja) * | 2003-05-16 | 2004-12-02 | Seiko Epson Corp | 音叉型圧電振動片および音叉型圧電振動子 |
| JP2005094724A (ja) * | 2003-09-17 | 2005-04-07 | Herutsu Kk | 音叉型水晶振動子 |
| JP2007271498A (ja) * | 2006-03-31 | 2007-10-18 | Kyocera Kinseki Corp | 加速度センサ |
| WO2010035714A1 (ja) * | 2008-09-26 | 2010-04-01 | 株式会社大真空 | 音叉型圧電振動片、および音叉型圧電振動デバイス |
| JP2011082956A (ja) * | 2009-09-11 | 2011-04-21 | Seiko Epson Corp | 振動片、振動子、発振器、および電子機器 |
| JP2014179901A (ja) * | 2013-03-15 | 2014-09-25 | Sii Crystal Technology Inc | 圧電振動片、圧電振動子、発振器、電子機器、及び電波時計 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3493292A (en) * | 1966-07-22 | 1970-02-03 | Bulova Watch Co Inc | Tuning fork structures |
| US7084556B1 (en) * | 2005-06-09 | 2006-08-01 | Eta Sa Manufacture Horlogere Suisse | Small-sized piezoelectric resonator |
| JP5135566B2 (ja) * | 2008-10-14 | 2013-02-06 | 有限会社ピエデック技術研究所 | 水晶振動子と水晶ユニットと水晶発振器及びそれらの製造方法 |
| JP5476964B2 (ja) * | 2009-12-09 | 2014-04-23 | セイコーエプソン株式会社 | 振動子、発振器、ジャイロ及び電子機器 |
| JP5479931B2 (ja) * | 2010-02-03 | 2014-04-23 | エスアイアイ・クリスタルテクノロジー株式会社 | 圧電振動子、発振器、電子機器および電波時計 |
| KR101837516B1 (ko) * | 2011-02-25 | 2018-03-12 | 가부시키가이샤 다이신쿠 | 압전 진동편, 압전 진동자, 압전 진동편의 제조 방법, 및 압전 진동자의 제조 방법 |
| JP2012186679A (ja) * | 2011-03-07 | 2012-09-27 | Seiko Epson Corp | 圧電振動素子、圧電振動子、圧電発振器、及び電子機器 |
| JP2014135655A (ja) * | 2013-01-10 | 2014-07-24 | Sii Crystal Technology Inc | 圧電振動片、圧電振動子、発振器、電子機器及び電波時計 |
| JP2014135654A (ja) * | 2013-01-10 | 2014-07-24 | Sii Crystal Technology Inc | 圧電振動片、圧電振動子、発振器、電子機器及び電波時計 |
| JP6013228B2 (ja) * | 2013-02-25 | 2016-10-25 | エスアイアイ・クリスタルテクノロジー株式会社 | 圧電振動子、発振器、電子機器及び電波時計 |
| JP6148881B2 (ja) * | 2013-03-11 | 2017-06-14 | エスアイアイ・クリスタルテクノロジー株式会社 | 圧電振動片、圧電振動子、発振器、電子機器及び電波時計 |
-
2013
- 2013-06-18 JP JP2013127980A patent/JP2015002548A/ja not_active Withdrawn
-
2014
- 2014-06-17 CN CN201410270270.4A patent/CN104242858A/zh active Pending
- 2014-06-18 US US14/307,999 patent/US20140368287A1/en not_active Abandoned
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52129395A (en) * | 1976-04-23 | 1977-10-29 | Seiko Instr & Electronics Ltd | Tuner fork type peizoelectric resonatpr |
| JPS5694813A (en) * | 1979-12-27 | 1981-07-31 | Seiko Instr & Electronics Ltd | Tuning fork type piezoelectric oscillator |
| JPS58170110A (ja) * | 1982-03-30 | 1983-10-06 | Citizen Watch Co Ltd | 水晶振動子 |
| JP2004343541A (ja) * | 2003-05-16 | 2004-12-02 | Seiko Epson Corp | 音叉型圧電振動片および音叉型圧電振動子 |
| JP2005094724A (ja) * | 2003-09-17 | 2005-04-07 | Herutsu Kk | 音叉型水晶振動子 |
| JP2007271498A (ja) * | 2006-03-31 | 2007-10-18 | Kyocera Kinseki Corp | 加速度センサ |
| WO2010035714A1 (ja) * | 2008-09-26 | 2010-04-01 | 株式会社大真空 | 音叉型圧電振動片、および音叉型圧電振動デバイス |
| JP2011082956A (ja) * | 2009-09-11 | 2011-04-21 | Seiko Epson Corp | 振動片、振動子、発振器、および電子機器 |
| JP2014179901A (ja) * | 2013-03-15 | 2014-09-25 | Sii Crystal Technology Inc | 圧電振動片、圧電振動子、発振器、電子機器、及び電波時計 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11804820B2 (en) | 2020-04-27 | 2023-10-31 | Murata Manufacturing Co., Ltd. | Resonator and resonance device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104242858A (zh) | 2014-12-24 |
| US20140368287A1 (en) | 2014-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6107333B2 (ja) | 振動子、発振器、電子機器および移動体 | |
| US9654083B2 (en) | Resonator element having a pair of vibrating arms with wide portions and arm portions | |
| JP2014138413A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| KR20140118840A (ko) | 진동 소자, 진동자, 발진기, 전자 기기 및 이동체 | |
| JP2014200051A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6277606B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6281254B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| TW201526542A (zh) | 振動元件、振動子、振盪器、電子機器及移動體 | |
| JP2015128262A (ja) | 振動片、振動子、発振器、電子機器、センサーおよび移動体 | |
| JP6287208B2 (ja) | 振動子、発振器、電子機器、物理量センサーおよび移動体 | |
| JP2015002548A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014200050A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6375612B2 (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP6375611B2 (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP2015149592A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2015097361A (ja) | 振動片、振動子、発振器、電子機器および移動体 | |
| JP6816805B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP7439852B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6614227B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP6521148B2 (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014175673A (ja) | 振動子、発振器、電子機器および移動体 | |
| JP2014179914A (ja) | 振動子、発振器、電子機器および移動体 | |
| JP2019115079A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2016058893A (ja) | 振動素子、振動子、発振器、電子機器および移動体 | |
| JP2014175809A (ja) | 振動子、発振器、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160616 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160616 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170509 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20170616 |