JP2014196096A - アンチスキッド装置、車両及び自動二輪車 - Google Patents
アンチスキッド装置、車両及び自動二輪車 Download PDFInfo
- Publication number
- JP2014196096A JP2014196096A JP2013073607A JP2013073607A JP2014196096A JP 2014196096 A JP2014196096 A JP 2014196096A JP 2013073607 A JP2013073607 A JP 2013073607A JP 2013073607 A JP2013073607 A JP 2013073607A JP 2014196096 A JP2014196096 A JP 2014196096A
- Authority
- JP
- Japan
- Prior art keywords
- skid
- control unit
- engine
- deceleration
- crankshaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 100
- 238000010248 power generation Methods 0.000 claims abstract description 14
- 230000001133 acceleration Effects 0.000 claims description 33
- 238000001514 detection method Methods 0.000 claims description 24
- 230000007246 mechanism Effects 0.000 claims description 10
- 230000001172 regenerating effect Effects 0.000 claims description 6
- 238000010521 absorption reaction Methods 0.000 claims description 3
- 230000005611 electricity Effects 0.000 claims 1
- 230000008859 change Effects 0.000 abstract description 17
- 238000000034 method Methods 0.000 description 50
- 230000008569 process Effects 0.000 description 50
- 230000009467 reduction Effects 0.000 description 20
- 230000001105 regulatory effect Effects 0.000 description 13
- 230000000875 corresponding effect Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 5
- 230000008929 regeneration Effects 0.000 description 5
- 238000011069 regeneration method Methods 0.000 description 5
- 238000002485 combustion reaction Methods 0.000 description 4
- 230000001276 controlling effect Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000009977 dual effect Effects 0.000 description 2
- 239000002828 fuel tank Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000002079 cooperative effect Effects 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000003344 environmental pollutant Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003319 supportive effect Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/10—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle
- B60K28/16—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle responsive to, or preventing, skidding of wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/24—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K6/485—Motor-assist type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/176—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/36—Cycles; Motorcycles; Scooters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/105—Output torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Landscapes
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Transmission Device (AREA)
- Hybrid Electric Vehicles (AREA)
- Regulating Braking Force (AREA)
- Structure Of Transmissions (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
Abstract
【課題】パラレルハイブリッド式の車両に搭載されて、駆動輪のスリップを確実に回避して滑らかな走行を実現すること。
【解決手段】ハイブリッド車両のアンチスキッド装置において、制御部120は、車両減速度が所定値以上の急減速時或いは前記変速機を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、発電機66を制御して、発電機66の発電量を減少させる動作から、クランクシャフトを加勢駆動する動作まで変化させることで、後輪13の減速トルクを調節する。
【選択図】図5
【解決手段】ハイブリッド車両のアンチスキッド装置において、制御部120は、車両減速度が所定値以上の急減速時或いは前記変速機を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、発電機66を制御して、発電機66の発電量を減少させる動作から、クランクシャフトを加勢駆動する動作まで変化させることで、後輪13の減速トルクを調節する。
【選択図】図5
Description
本発明は、エンジン、モータ等の複数の駆動源により走行するハイブリッド車両のアンチスキッド装置、これを備える車両及び自動二輪車に関する。
エンジン駆動式の車両については、環境問題の観点から、排出される環境汚染物質をできるだけ少なくする車両が望まれている。これを受けて、近年、エンジン駆動式の車両に替わる車両として、エンジンとともに、車輪を駆動する電気モータを搭載して、電気モータにより駆動輪の駆動を行うハイブリッド車両が開発されている。
ハイブリッド車両としては、例えば、エンジンで発電機を駆動し、この発電機により発電される電力を用いて、駆動輪を駆動する駆動モータを駆動させるシリーズハイブリッド式車両が知られている。また、走行状態に応じて、または、発電機により充電されるバッテリ(2次電池)の残存電量に応じて、エンジンおよびモータの両方のうち少なくとも一方を切り替えて、駆動輪を駆動するパラレルハイブリッド式車両が知られている。
このようなパラレルハイブリッド式車両では、エンジンが高回転で運転しているときに、アクセルを急に全閉まで戻すと、エンジンのマイナストルク(逆トルク、所謂エンジンブレーキ)により、駆動輪である後輪がグリップ限界を超えてスリップを起こすことがある。
また、車両では、ブレーキ操作を伴う強減速中にシフトダウンを行うことでエンジンが高回転になる場合、クラッチを繋いだ後に、それまでの制動力に、変速機の減速比が大きくなることに伴ってエンジンのマイナストルクが増大して加わる。これにより、駆動輪である後輪がグリップの限度を超えてスリップを起こすことがある。
このような駆動輪のスリップを起こしにくくする仕組みとして、例えば、特許文献1では、CVT(Continuously Variable Transmission)が搭載された走行中の車両において、スリップしている状態であるか、つまり、スキッド状態であるかを監視する走行制御装置が知られている。
この走行制御装置は、スキッド状態であれば、発電機を制御して駆動輪から伝達されるトルクを制限することで、スキッド状態を回避する。
ところで、上述の特許文献1に記載の走行制御装置は、CVTに搭載されて、スキッドの発生後、発生したスキッドを抑制する、つまり、スキッドの発生に基づいて、スキッドを事後で抑制するものである。近年では、スキッドの発生に基づいて、スキッドを事後に抑制する走行制御装置よりも、一層、効果的にスキッドを回避可能な装置が望まれている。
また、上記スキッドを抑制する装置はCVTに搭載されているが、有段変速機を有するパラレルハイブリッド式の車両でも、スキッドを発生させることなく、滑らかな走行を行いたいという要望があった。
さらに、有段変速機を有するパラレルハイブリッド式の車両として、パラレルハイブリッド式の自動二輪車でも、スキッドを発生させることなく、滑らかな走行を行いたいという要望がある。
自動二輪車では、駆動輪のスリップを起こしにくくする仕組みとして、駆動輪から伝達されるトルクを自動的に制限するスリッパークラッチ、所謂、バックトルクリミッタ(Back Torque Limiter:BTLともいう)が広く知られている。一般的に、BTLは、動力伝達経路において変速ギアよりエンジン側に配置されることで、BTL自体に作用する逆トルクを制限する動作を担う。これにより、BTLが制限する逆トルクであって、後輪軸に於ける逆トルクは、ギア段を介して後輪軸に伝達されるため、逆トルクは、運転時に使用されているギア段に因って異なるものとなる。
即ち、後輪軸において制限される逆トルクは、設定されているギア比に依存して決定される。例えば、高速ギア段(例えば6速から5速へシフトダウンした場合)と中間速ギア段(例えば4速から3速へシフトダウンした場合)、あるいは低速ギア段(例えば2速から1速へシフトダウンした場合)とにおいてBTLが動作する場合では、後輪軸に於いて制限される逆トルクが異なる。
これにより、或る特定の変速ギア段に対応した逆トルクの制限を設定すると、他のギア段では必ずしも適切な動作に設定できる訳ではない。具体的には、低速ギア段で適切な逆トルク制限動作を設定すると、高速ギア段ではBTLが容易に動作してしまいエンジンブレーキが不足するという問題がある。したがって、BTLが搭載された自動二輪車であっても、スリップすることなく滑らかな走行を実現することが望まれている。
本発明はかかる点に鑑みてなされたものであり、パラレルハイブリッド式の車両に搭載されて、駆動輪のスリップを事前に回避することでより効果的に滑らかな走行を実現できるアンチスキッド装置を提供することを目的とする。
本発明のアンチスキッド装置の一つの態様は、車両の推進力として、クランク軸より回転動力を出力するエンジンと、前記エンジンの前記クランク軸に連結され、当該クランク軸の出力にトルクを加勢して補助駆動力を発生するとともに、当該クランク軸のトルクにより駆動され発電可能な発電電動機と、前記発電電動機に電力を供給するとともに、前記発電電動機の発電した電力を蓄電可能なバッテリと、前記クランク軸の回転を変速して駆動輪に伝達する変速機と、を有するハイブリッド車両のアンチスキッド装置であって、車両減速度が所定値以上の急減速時或いは前記変速機を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、前記発電電動機を制御して、当該発電電動機の発電量を減少させる動作から、前記クランク軸を加勢駆動する動作まで、変化させることにより、前記駆動輪の減速トルクを調節する発電機制御部を有する構成を採る。
本発明の車両の一つの態様は、上記構成のアンチスキッド装置を備える構成を採る。また、本発明の二輪車は、上記構成のアンチスキッド装置を備える構成を採る。
本発明によれば、パラレルハイブリッド式の車両に搭載されて、駆動輪のスキッドの発生、つまり、スリップを確実に事前に回避して滑らかな走行を実現できる。
以下、本発明の実施の形態について、図面を参照して詳細に説明する。なお、本実施の形態では往復動内燃機関であるレシプロエンジンを備える車両を自動二輪車として説明する。また、本実施の形態において前,後,左,右とは、上記自動二輪車のシートに着座した状態で見た場合の前,後,左,右を意味する。
図1は、本発明の一実施の形態に係るアンチスキッド装置を備える自動二輪車の左側面図である。
また、本発明のアンチスキッド装置を備える自動二輪車は、走行状態や、発電機により充電されるバッテリの残存電力量に応じて、エンジンおよびモータの両方の少なくとも一方切り替えて、駆動輪を駆動するパラレルハイブリッド式の自動二輪車である。
本実施の形態の往復動内燃機関であるエンジンは変速機と一体的に設けられている。なお、本実施の形態に係るアンチスキッド装置が搭載される車両を自動二輪車としたが、これに限らない。本実施の形態に係るアンチスキッド装置が搭載される車両としては、運転者が跨いで乗車する鞍乗り型車両、例えば、3輪或いは4輪の鞍乗り型車両としてもよい。まず、本実施の形態に係る変速機を備えるエンジンユニットが搭載された自動二輪車の概要について説明する。
(1)自動二輪車の構成
図1に示すように、自動二輪車10では、メインフレーム1の前端側にヘッドパイプ2が設けられている。このメインフレーム1は、後方に延びつつ下方に傾斜して形成され、その内部には、レシプロエンジン本体(以下、単に「エンジン本体」という)6、変速機7等を含むエンジン8が配置されている。ヘッドパイプ2には、上部にハンドル5が取り付けられたフロントフォーク3が回動可能に設けられ、このフロントフォーク3の下端で回転自在に取り付けられた前輪4を支持している。
図1に示すように、自動二輪車10では、メインフレーム1の前端側にヘッドパイプ2が設けられている。このメインフレーム1は、後方に延びつつ下方に傾斜して形成され、その内部には、レシプロエンジン本体(以下、単に「エンジン本体」という)6、変速機7等を含むエンジン8が配置されている。ヘッドパイプ2には、上部にハンドル5が取り付けられたフロントフォーク3が回動可能に設けられ、このフロントフォーク3の下端で回転自在に取り付けられた前輪4を支持している。
このハンドル5には、運転者の操作によりエンジン8の変速機7に変速動作させるシフトスイッチ(図示省略)が設けられている。なお、シフトスイッチは、シフトアップボタンおよびシフトダウンボタン(図示省略)を有する。これらシフトアップボタンが運転者に押下されることによって、変速機7はシフトアップ動作を実行し、シフトダウンボタンが運転者に押下されることによって、変速機7はシフトダウン動作を実行する。
メインフレーム1において、エンジン8の上方にシート9及び燃料タンク9aが配置されている。なお、これらシート9及び燃料タンク9aとエンジン8との間には、自動二輪車10の各部の動作を制御するECU11(Electronic Control Unit;電子制御ユニット)が配設されている。このECU11によって、1基のエンジン本体6に対して、摩擦伝動式クラッチにより変速ギア段の動力伝達を行う変速機7の動作は制御される。
また、メインフレーム1において下方に傾斜する後端辺部から、リアアーム12が後方に延在して接合されている。リアアーム12は、後輪(駆動輪)13と、ドライブチェーン14が巻回されたドリブンスプロケット15とを回転可能に保持している。
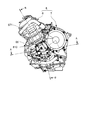
(2)エンジン8の構成
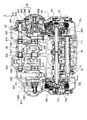
図2は、一実施の形態に係る往復動内燃機関としてのエンジンの左側面図であり、図3は、図2のA−A線で示す部位に相当するエンジンの軸断面図、図4は、図2のB−B線で示す部位に相当するエンジンの横断面図である。なお、図3では、クランクシャフトを、クランクピン641、642、643、644に、便宜上、コンロッド69(図4参照)が接続されていない状態で示している。
図2は、一実施の形態に係る往復動内燃機関としてのエンジンの左側面図であり、図3は、図2のA−A線で示す部位に相当するエンジンの軸断面図、図4は、図2のB−B線で示す部位に相当するエンジンの横断面図である。なお、図3では、クランクシャフトを、クランクピン641、642、643、644に、便宜上、コンロッド69(図4参照)が接続されていない状態で示している。
本実施の形態における往復動内燃機関としてのエンジン8は、エンジン本体6と、変速機7と、エンジン本体6及び変速機7が取り付けられるクランクケース810及びミッションケース830とを有する。
エンジン本体6は、クランクシャフト60と、カム軸駆動部65と、バランスシャフト90とを有し、発電機66と、複数の摩擦伝動式のクラッチ741、742を備える変速機7とともに一体的に構成されている。
カム軸駆動部65、発電機66及びバランスシャフト90は、クランクシャフト60の回転により駆動される。
クランクシャフト60は、エンジン8のクランクケース810内に、シリンダヘッドの下方で車両の前後方向に直交する方向(左右方向)に略水平に延在しつつ、回動自在に配置されている。なお、クランクケース810に隣接して中空のミッションケース830が設けられており、クランクケース810、ミッションケース830を含む領域に変速機7は配設される。
クランクシャフト60は、ここでは、複数のクランクピン641〜644を配置して回転偶力を有する。具体的には、クランクシャフト60はクロスプレーン式のクランクシャフトであり、シリンダに対応する数、ここでは4つのクランクピン641〜644が、相互に90度の位相で配置されている。
このエンジン本体6では、シリンダは、図1及び図2に示すように、クランクシャフト60を収容するクランクケース810(図3及び図4参照)に、前側上方に斜めに突出して配置されている。ここでは、シリンダは4つのシリンダ671〜674から構成されている。これらシリンダ671〜674は、図4に示すように、並べた中央が車両或いはエンジン8の左右方向の略中心部分に位置するように、クランクシャフト60の延在方向に沿って並べて配置されている。
クランクシャフト60は、複数のカウンターウエイト(ウェブ(web)も含む、以下、「CW(Counter Weight)」と称する)631〜636、637、638を有する。クランクシャフト60は、CW631〜636、637、638を、5つのジャーナル621〜625とクランクピン641〜644とで接合することで形成されている。なお、CW(ウェブも含む)631〜638は、それぞれ、クランクシャフト60における回転バランスの不平衡力(アンバランス)を打ち消す。この回転バランスの不平衡力は、シリンダ671〜674内のピストン68、コンロッド69の往復運動により生じる慣性力に起因する。
図4に示すように、クランクシャフト60のクランクピン641〜644は、それぞれ、シリンダ671〜674内のピストン68にコンロッド69を介して接続されている。
クランクシャフト60は、ジャーナル621〜625をクランクケース810のジャーナル受け内壁811〜815で軸受け(メタル)を介して回動自在に軸支させた状態で、クランクケース810に、回動自在に取り付けられている。
クランクシャフト60の両端部は、クランクケース810のジャーナル受け内壁811、815から左右に突出させた状態で配置されている。
このクランクシャフト60における左右の両軸端部のうち、他方の軸端部(左側端部)には、カム軸駆動部65が取り付けられている。また、クランクシャフト60の両端部のうち、カム軸駆動部65が取り付けられていない側の端部に、発電機66が取り付けられている。これらカム軸駆動部65及び発電機66は、それぞれクランクシャフト60の回転により駆動する。
カム軸駆動部65では、クランクシャフト60の左側端部に固定されたカムギア651が回転することによってカムチェーン652(図3及び図4参照)が回動する。
カムチェーン652の回動によって、図4に示すように、カムチェーン652にギアを介して巻回されたカム動弁軸654が回転する。これにより、エンジン本体6では、カム軸のカムの回転により吸排気弁(図4では、図2のB−B断面に相当する断面を、図中右側の2つのシリンダにおけるプラグ656で示し、図中左側にある2つのシリンダの断面は、吸気弁655a、排気弁655bを部分的に示す)が駆動する。なお、カム軸駆動部65は、カム軸駆動部カバー(カムチェーンカバー)により被覆されている。
発電機66は、クランクシャフト60に固定されクランクシャフト60と共に回転するロータ661と、ロータ661の内周に配置され、クランクケース810に固定されたステータ662とを有する。発電機66は、発電機部カバーにより被覆されている。ここで、発電機66は同期型交流電動機(ブラシレスDCモーター)であり、後述する電力制御部134(図5)へ電気的に接続されている。
また、クランクシャフト60において発電機66が配設された一端部側(右側)には、最も一端側に位置するCW638を加工して、その外周に、ギア(減小ギア)639が設けられている。ギア639は、エンジン本体6の回転動力を出力する、つまり、パワーテイクオフ(Power Take Off:PTO)する。ギア付CW638は、変速機7の第1クラッチ741の第1減大ギア721に歯合して、クランクシャフト60の一端部(右側端部)側から、第1減大ギア721に、エンジン8の回転動力(具体的には、エンジン本体6の回転動力)を伝達する。この第1減大ギア721に伝達される回転動力は、第1クラッチ741に出力され、この第1クラッチ741を介して、第1メインシャフト711に伝達される。
また、クランクシャフト60の一端部側に、CW638に隣接して、バランスシャフト90に回転力を伝達するバランサ駆動ギア(以下、「バランスギア」という)91が圧入により固定されている。このバランスギア91は、バランスシャフト90のバランサドリブンギア93に歯合する。このバランスシャフト90は、クランクシャフト60と平行に配設されている。バランスシャフト90は、クランクシャフト60と共にCWとして機能する。バランスシャフト90は、クランクシャフト60に発生する偶力に対応して配置されており、この偶力が車両に振動として伝達することを防止する。
また、クランクシャフト60においてカム軸駆動部65が配設された他端部側(左側)には、外周にギア溝が形成された外歯歯車(別ギア)602が圧入されており、外歯歯車602は、CW631に隣接する位置に固定されている。
この外歯歯車602は、ギア付CW638と同様に、エンジン本体6の回転動力を出力する機能を有し、そのギア溝は、ギア付CW638のギア639と同様のものである。ここでは、外歯歯車602は、第2クラッチ742の第2減大ギア722に歯合して、エンジン本体6の回転動力を、第2減大ギア722に、クランクシャフト60の他端部(左側端部)側から伝達する。この第2減大ギア722に伝達される回転動力は、第2クラッチ742に出力され、この第2クラッチ742を介して、変速機7の第2メインシャフト712に伝達される。
このように、クランクシャフト60は両端側から、変速機7における2つのクラッチ741、742にそれぞれエンジン8の回転動力を伝達する。
変速機7は、デュアルクラッチ式変速機であり、複数のクラッチ、ここでは第1クラッチ741、第2クラッチ742を用いて、奇数段と偶数段の変速ギア段の動力伝達をそれぞれ交互に行う。これにより、クランクシャフト60から伝達されるエンジン本体6の回転動力を可変して後輪13側に伝達する際に、動力伝達に切れ目のない変速(変速ギア段の変更)を実現する。
変速機7は、変速機7の左右方向全幅における略中心と自動二輪車10の左右方向における中心、つまり、車両中心面とが一致する或いは近接するようにエンジン後方のミッションケース830に設けられている。車両中心面とは、車両を水平面に対して垂直に立てた状態において、車両中心線を通る鉛直な面を意味する。
また、変速機7は、第1メインシャフト711と、第2メインシャフト712と、第1減大ギア721と、第2減大ギア722と、ドライブシャフト73と、第1クラッチ741と、第2クラッチ742と、変速ギア群75と、を有する。
第1メインシャフト711、第2メインシャフト712及びドライブシャフト73は、車両と直交する方向で略水平に配置されたクランクシャフト60と平行に、ミッションケース830内に回動自在に配置される。第1メインシャフト711と、第2メインシャフト712は、互いに同径の外径を有し、同一軸線上に左右に並べて配設されるとともに、それぞれ独立して回動する。これら第1メインシャフト711及び第2メインシャフト712を挟むように第1クラッチ741及び第2クラッチ742は、車両の左右側にそれぞれ配置されている。
具体的には、第1、第2メインシャフト711、712は、それぞれの先端部を、ミッションケース830内の略中央で、互いに対向させるとともに、それぞれの基端部を、ミッションケース830の両側方向から左右に向かって突出させて配置されている。
第1メインシャフト711において、ミッションケース830の一側方(右側)から突出する基端部には、第1クラッチ741が連結されている。
第2メインシャフト712において、ミッションケース830の他側方(左側)から突出する基端部には、第2クラッチ742が連結されている。
第1クラッチ741は、クランクシャフト60から第1メインシャフト711に伝達されるエンジン本体6の回転動力を切断又は接続する。
第1クラッチ741では、第1減大ギア721と一体的に設けられたクラッチアウタとが、第1メインシャフト711の外周を回転自在に設けられている。この第1クラッチ741は、クラッチアウタと、クラッチアウタの内側に配置され、クラチアウタと開放(切断)・締結(接続)するクラッチインナとを有する。クラッチインナは、第1メインシャフト711の基端部(右側端部)に固定されている。これらクラッチアウタ、クラッチインナの開放、締結によって、第1クラッチ741は、エンジン本体6の回転動力を切断又は接続する。この第1クラッチ741は、第1クラッチアクチュエータ(図示省略)のプルロッド77に連結されている。具体的には、第1クラッチ741では、プルロッド77にプレッシャプレートが引かれることで、クラッチアウタはクラッチインナに対して離間する。第1クラッチ741は、第1クラッチアクチュエータ(図示省略)を介して、ECU11(図1参照)により動作を制御される。第1クラッチ741は、変速ギア群75のうち、第1メインシャフト711及びドライブシャフト73に跨がって配設される奇数ギア段(1段、3段、5段)の変速ギア段を介して、ドライブシャフト73に回転動力を出力する。その回転動力を、ドライブシャフト73は、ドライブスプロケット76、ドライブチェーン14、ドリブンスプロケット15を介して、後輪13に伝達する。なお、変速ギア群75は、変速ギア段(1段〜6段)の各変速ギア段からなり、シフト機構(図示省略)によってギアシフトされる。
第2クラッチ742は、クランクシャフト60から第2減大ギア722を介して第2メインシャフト712に伝達されるエンジン本体6の回転動力を、切断又は接続する。この第2クラッチ742は、第1クラッチ741と左右対称に構成されている。第2クラッチ742では、第2減大ギア722と、この第2減大ギア722と一体のクラッチアウタとが、第2メインシャフト712の外周を回転自在に設けられている。第2クラッチ742は、クラッチアウタと、このクラッチアウタの内側に配置され、クラチアウタと開放(切断)・締結(接続)するクラッチインナとを有する。クラッチインナは、第2メインシャフト712の基端部(左側端部)に固定されている。これらクラッチアウタ、クラッチインナの開放、締結によって、第2クラッチ742は、エンジン本体6の回転動力を切断又は接続する。この第2クラッチ742は、第2クラッチアクチュエータ(図示省略)のプルロッド772に連結されている。具体的には、第2クラッチ742では、プルロッド772にプレッシャプレートが引かれることで、クラッチアウタはクラッチインナに対して離間する。第2クラッチ742は、第2クラッチアクチュエータ(図示省略)を介して、ECU11(図1参照)により動作を制御される。第2クラッチ742は、変速ギア群75のうち、第2メインシャフト712及びドライブシャフト73に跨がって配設される偶数ギア段(2段、4段、6段)の変速ギア段を介して、ドライブシャフト73に回転動力を出力する。その回転動力を、ドライブシャフト73は、ドライブスプロケット76、ドライブチェーン14、ドリブンスプロケット15を介して、後輪13に伝達する。
変速ギア群75の各ギアに対して行われるギアシフトは、シフト機構(図示省略)におけるシフトカムの回転によって可動するシフトフォークによって行われる。シフトフォークは、変速機7の変速ギア群75における各スプラインギアを軸方向移動することでギアシフトを行う。シフト機構は、第1クラッチ741、第2クラッチ742と同様に、ECU11(図1参照)により動作制御される。第1クラッチ741、第2クラッチ742とシフト機構は、シフト変更の入力に基づいて、第1クラッチ741、第2クラッチ742の断接動作、及び、この断接動作に対応する変速ギア段における各ギアを介した動力伝達を行う。
ここまで、アンチスキッド装置を備える自動二輪車10の構造について説明した。次に、自動二輪車10の制御系におけるアンチスキッド装置の構成と機能を説明する。
(3)アンチスキッド装置の構成
図5は、本発明の実施の形態1に係るアンチスキッド装置を説明するための自動二輪車の制御系を示すブロック図である。なお、図5において、太線L1〜L4は、機械的に接続された動力経路、両矢印線EL1、EL2は電気的に接続された電気動力の経路を示している。
図5は、本発明の実施の形態1に係るアンチスキッド装置を説明するための自動二輪車の制御系を示すブロック図である。なお、図5において、太線L1〜L4は、機械的に接続された動力経路、両矢印線EL1、EL2は電気的に接続された電気動力の経路を示している。
自動二輪車10におけるアンチスキッド装置は、ブレーキ操作量検出部112、アクセル操作量検出部114、クラッチ操作量検出部116、シフト操作検出部118、制御部120、ブレーキ制御部132、電力制御部134、エンジン制御部136、トランスミッション制御部138を有する。
ブレーキ操作量検出部112は、運転者のブレーキ操作量を検出して、そのブレーキ操作量を示す情報を制御部120に出力する。
アクセル操作量検出部114は、運転者のアクセル操作量を検出して、そのアクセル操作量を示す情報を、制御部120に出力する。
クラッチ操作量検出部116は、運転者のクラッチ操作量を検出して、クラッチ操作量を示す情報を、制御部120に出力する。
シフト操作検出部118は、シフト操作を検出して、この検出した情報、つまり、運転者の変速指示(要求)を示す情報を、制御部120に出力する。
制御部120には、各部112、114、116、118から入力される情報に加えて、各センサ(図示省略)からシフトポジション、エンジン回転数、スロットル開度、前輪車速、後輪車速の各情報が入力される。シフトポジション情報は、シフトカムの位相角を検出する位相角センサから制御部120に入力される。また、エンジン回転数は、クランクシャフト60の回転数を検出するセンサから制御部120に入力される。さらに、スロットル開度、前輪車速及び後輪車速は、それぞれ、開度、前輪回転数、後輪回転数を検出するセンサから制御部120に入力される。
制御部120は、これら入力される情報に基づいて、自動二輪車10の駆動を含み自動二輪車10全体の各構成要素を制御する。制御部120は、入力される情報に基づいて、ブレーキ制御部132、電力制御部134、エンジン制御部136、トランスミッション制御部138を協調的に動作させる制御指令を生成する。制御部120は、生成した制御指令によって、ブレーキ制御部132、電力制御部134、エンジン制御部136、トランスミッション制御部138のそれぞれを制御する。
一方、制御部120には、ブレーキ制御部132からブレーキの制御状態を示す情報と、電力制御部134からはバッテリ142の残存電力量および発電機66の制御状態を示す情報と、が通信される。加えて、制御部120には、エンジン制御部136からはエンジン本体6の制御状態を示す情報と、さらにトランスミッション制御部138からはトランスミッション(具体的には変速ギア段及び2つのクラッチ)の接続状況を示す情報と、が通信される。これら入力情報により、制御部120は、常に車両の状態を把握しつつ、エンジン本体6及び発電機66の一方あるいは双方で駆動輪である後輪13を駆動したり、発電機66を駆動して回生制動したりする。
このように制御部120は、走行状態や、発電機により充電されるバッテリ142の残存電力量に応じて、制御対象をエンジンおよびモータの両方の少なくとも一方に切り替えて制御し、エンジン制御とともに、駆動輪における減速力を含む駆動力を制御する。
これら制御のうちの一つとして、制御部120は、入力される情報に基づいて、ブレーキ制御部132、電力制御部134、エンジン制御部136、トランスミッション制御部138を制御して、加速中及び減速中においてアンチスキッド処理を行う。
アンチスキッド処理では、制御部120は、入力される情報に基づいて、前輪車速及び後輪車速、マイナス(所謂、減速度)を含む加速度、エンジン及び発電機が出力しているトルク、変速ギア段及び2つのクラッチの接続状況を監視する。これらを監視することで制御部120は、電力制御部134を介して発電機66の制御を行う。
アンチスキッド処理として、制御部120は、車両の減速度が所定値以上の速度となる急減速時、或いは、変速機を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、電力制御部134へ発電機66の発電量を減少させるように指令する。すると、エンジン本体6では、発電機66に於ける発電負荷、即ち、発電機66で生じるマイナストルクが小さくなる。この結果として、エンジン本体6から後輪(駆動輪)13へ伝達される減速トルク(エンジンブレーキ)が弱められる。これにより、制御部120は、後輪13のスキッドの発生を防止したり、あるいは後輪13のグリップを回復したりする。
また、アンチスキッド処理として、制御部120は、車両減速度が所定値以上の速度となる急減速時、或いは、変速機を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、電力制御部134へ発電機66によるクランクシャフト60の加勢駆動を指令する。これを受けて、電力制御部134は、DC/DCコンバータ144を介してバッテリ142から発電機66へ電力を供給し、発電機66で生じるプラストルクによってクランクシャフト60を加勢駆動する。この結果、エンジン本体6から後輪13へ伝達される減速トルク(エンジンブレーキ)は一層弱められる。これにより、制御部120は、後輪13のスキッドの発生を防止したり、あるいは、速やかに後輪13のグリップを回復したりする。
このように、制御部120は、車両減速度が所定値以上の急減速時、或いは、変速機を介したシフトダウンを伴う減速時において、発電機66を制御して、発電機66の発電量を減少させる動作から、クランクシャフト60を加勢駆動する動作まで、変化させる。これにより、上述したように後輪13の減速トルクを調節する。
本実施の形態では、制御部120は、スキッド判定部122と、スキッド予測部124と、協調動作生成部126とを有する。
スキッド判定部122は、入力される情報(例えば、加減速度、車輪回転数をそれぞれ示す情報)に基づいて、駆動輪である後輪13がスリップしているか否か、つまり、スキッドしているか否かを判定する。すなわち、スキッド判定部122は、後輪13がスキッドしていることを事後的に判定して、グリップを回復させるように各部を制御する。言い換えれば、スキッド判定部122は、アンチスキッド処理を、受動的な制御(パッシブ制御)で行う。具体的には、スキッド判定部122では、バンク角、車速等によりスキッドしている状態の判定を行うためのスキッド判定値(閾値)として適合値がテーブルとして予め設定されている。
スキッド判定部122は、テーブルにおける適合値と、入力される情報とを比較して、現在の後輪13の走行状態がスキッド状態であることを判定する。
なお、バンク角は、ここでは、入力される前輪回転数及び後輪回転数を用いて制御部120により算出される構成としているが、これに限らず、車体の傾斜角を検出する傾斜角センサを用いた構成としてもよい。この場合、傾斜角センサによりバンク角を検出できるため、前輪回転数及び後輪回転数を用いて算出する場合と同様の作用効果を得ることができる。
具体的には、スキッド判定部122では、閾値として用いられるスキッド判定値(適合値)と上述したスキッド状態を表現するスキッド状態値を比較し、後輪13がスキッド発生状態であるか否かを判定する。すなわち、スキッド状態値は、車両における現在のスキッドの状態を表現する状態値を意味する。このスキッド判定部122は、車両の減速中における後輪13のスリップを検知して、後輪13に生じる減速トルクを減じるように、発電機66を制御して、エンジン本体6を駆動する。
スキッド予測部124は、入力される情報に基づいて、駆動輪である後輪13がスリップしそうであるか否かを予測する。このスキッド予測部124は、現状の走行状態を続けることでスキッド発生に至る場合に、スキッドが発生する以前に、スキッドを回避するように各部を能動的に制御(アクティブ制御)するために用いられる。すなわち、スキッド予測部124は、走行状態に基づいて、スキッド発生を回避する動作を予測的に励起する。
このスキッド予測部124は、入力される車両の運転状態および運転者の操作についての情報と、制御部120に予め記憶される車両の諸元情報(「車両諸元」ともいう)とを用いて、現在の運転状況からスキッド発生に至るまでの余裕を表現する状態値(スキッド余裕値)を算出する。ここで余裕とは、後輪13でスキッドが発生されるまでの範囲であって後輪13のグリップを維持できる値の範囲である。
ここでは、スキッド予測部124は、車両の運転状態を示す入力情報から、後輪13のスリップ限界推力を算出する。スキッド予測部124は、エンジン回転数及びスロットル開度からエンジントルクを算出する。また、スキッド予測部124は、電力制御部134から制御部120へ提供される発電機66の制御状態情報から発電機66で発生している駆動あるいは回生トルクを算出する。また、スキッド予測部124は、制御部120に予め記憶された車両諸元を参照する。ここでは、車両諸元は、1次減速比(第1減大ギア721と第1減小ギア639、第2減大ギア722と外歯歯車602の歯数比)、2次減速比(ドリブンスプロケット15とドライブスプロケット76の歯数比)、およびシフトポジション(所謂ギアポジション)に対応するギア比、後輪13の有効半径である。これらスリップ限界推力、エンジントルク、発電機66での駆動或いは回生トルク、及び、車両諸元に基づいて、スキッド予測部124は、現在エンジン本体6から後輪13へ駆動トルクとして伝達されて後輪13において作用している駆動力を算出する。
さらに、スキッド予測部124は、前輪回転数から前輪加速度と、後輪回転数(車速)から後輪加速度を算出する。また、この前輪加速度及び後輪加速度と、上述した後輪13に作用している駆動力と、制御部120に予め記憶された車両諸元を参照して走行抵抗を算出し、比較することにより、前輪4及び後輪13に作用しているブレーキによる制動力を算出する。ここで、後輪13に於いて作用しているのは、前述駆動力と後輪制動力の合計(後輪推力)である。
スキッド予測部124は、制御部120に予め記憶された車両諸元から、車両のホイールベース、ホイールベースに対する重心位置(前後、左右、高さ)、さらに懸架装置の変位特性に関する情報を参照する。これら参照して、スキッド予測部124は、前輪4に作用している前輪制動力と、後輪13に作用している駆動力と後輪制動力の合計(後輪推力)と、から、前輪荷重および後輪荷重を推定し、後輪荷重と路面μとを用いて、後輪13のスリップ限界推力を算出する。
スキッド予測部124は、後輪推力(正確には、制動力は負の値であるので、演算上は絶対値を用いる)と、スリップ限界推力とを比較する。
スキッド予測部124では、スリップ限界推力のほうが大きければスキッド余裕が有り、逆に、後輪推力のほうが大きければ、スキッド余裕が無い、即ち、スキッドが発生し易い状況であると判定する。
また、スキッド予測部124は、後輪13のスキッド限界推力が駆動力に対して不足している等の状態を検出し、これをスキッドの可能性有りと判断する。
ここでは、スキッド予測部124は、スキッド判定部122で求めて記憶した路面μにより算出できる、その時の後輪13(図1参照)のスリップ限界推力と駆動力、及び、その時の後輪13(図1参照)のスリップ限界推力と制動力とを比較する。なお、路面μは、前輪4において発生したスキッドより求めて記憶した値を用いても良い。
協調動作生成部126は、スキッド判定部122及びスキッド予測部124から入力される情報に基づいて、ブレーキ、モータ、エンジンの制御の協調動作を生成する。生成した動作は、ブレーキ制御部132、電力制御部134、エンジン制御部136及びトランスミッション制御部138に各々指令値として出力する。また、ブレーキ制御部132、電力制御部134、エンジン制御部136及びトランスミッション制御部138は、それぞれの制御実効値(指令に対する実効)あるいは状態を示す情報を制御部120へ逐次通信する。
ブレーキ制御部132は、制御部120から入力される指令値に基づいて、ABS(Antilock Brake System)油圧ユニット133を介して、低摩擦路面を走行する際のブレーキ制動による車輪の滑走を抑制する。
電力制御部134は、制御部120から入力される指令値に基づいて、発電機66の電流と電圧を制御する。電力制御部134は、発電機66の電流と電圧を、DC/DCコンバータ144を介してバッテリ142から発電機66へ出力する電力と、発電機66からDC/DCコンバータ144を介してバッテリ142に回生される電力と、を含めて制御する。また、電力制御部134は、バッテリ142の入出力と残存電力量を監視する。
エンジン制御部136は、エンジン本体6の運転に関わる制御を行うものである。エンジン制御部136は、制御部120から入力される指令値に基づいて、直接には、スロットルバルブによる吸入空気量、インジェクターによる燃料噴射、イグニッションプラグによる点火等の動作を制御する。加えて、エンジン制御部136は、制御部120から入力される指令値に基づいて、間接にはエンジン本体6で発生するトルクを制御する。
トランスミッション制御部138は、制御部120から入力される制御指令に基づいて、変速機7の変速(シフトチェンジ)を制御して(具体的には、2つのクラッチの断続制御とシフト機構による変速の制御をして)、駆動輪である後輪13に駆動力を出力する。
次に、図5〜図7を参照して、自動二輪車10におけるアンチスキッド装置の制御を説明する。図6は、アンチスキッド装置の制御を示すフローチャートである。また、図7は、アンチスキッド装置による動作と各部との対応を示す図であり、図6に示すフローチャートでの処理を行う各部と、各部の機能と、その機能の対象となる制御部と要素を示している。具体的には、図6に示すアンチスキッド処理において制御部120で生成される協調動作における、動作対象制御部及びその際の制御要素を示し、協調動作において主で動作すれば「◎(二重丸)」で示し、支援的な動作であれば、「○(丸)」で示す。また「準備」は準備動作を行うことを示し、「規制」は動作が規制されることを示している。
自動二輪車10ではECU11の制御が開始すると、具体的には、イグニッションにより自動二輪車10が駆動開始すると、ECU11の一部を含むアンチスキッド装置には、自動二輪車10に搭載される各部から自動二輪車10の駆動に関する情報が入力される。
ステップS10は制御部120における処理であり、ステップS10では、ECU11及びアンチスキッド装置の制御部120には、常時、以下のように各情報が入力される。
制御部120には、図5に示すように、前輪回転数センサ(前輪回転数検出部)から前輪回転数(「前輪車速」)が入力され、車速センサ(後輪回転数検出部)から後輪回転数(「後輪車速」)が入力される。また、制御部120には、クランクシャフト60の回転数を検出するエンジン回転数センサからクランクシャフトの回転数、つまり、「エンジン回転数」が入力される。また、制御部120には、スロットルバブル開度を検出するスロットル開度センサから「スロットル開度」が入力される。さらに、制御部120には、シフトカムの位相角を検出する位相角センサから信号が入力される。なお、制御部120では、シフトカムの位相角を検出する位相角センサからの信号(図5では「シフトポジション」で示す)に基づいて「シフトポジション(ギアポジションと同義)」を判定する。
また、制御部120には、シフト操作検出部118からシフト要求が入力され、アクセル操作量検出部114からアクセル操作量が入力される。さらに、制御部120には、ブレーキ操作量検出部112からブレーキ操作量が入力され、クラッチ操作量検出部116からクラッチ操作量が入力される。
このアンチスキッド装置(詳細には制御部120)は、入力される前輪回転数及び後輪回転数を用いてバンク角を算出し、エンジン回転数及びスロットル開度を用いてエンジントルクを算出する。同時に、発電機66の制御状態を参照して発電機トルクを算出して、クランクシャフトから駆動力として出力されるクランクトルクを算出する。また、アンチスキッド装置は、シフトカムの位相角から判定したシフトポジション(ギアポジション)に対応した、車両の諸元値として予め記憶されているギア比を参照する。これらクランクトルク、ギア比を用いてアンチスキッド装置は、駆動軸(後輪13の軸)トルクを算出する。
制御部120は、ステップS10以降、つまりステップS22、S23以降で、スキッド判定部122と、スキッド予測部124とにおいて同時に、スキッドの判定と予測を行う。
具体的には、制御部120は、入力される情報に基づいて、スキッド判定部122を用いてスキッドが発生した際にアンチスキッド処理を行い、スキッド予測部124を用いて、スキッドの発生を予測し、スキッドが生じる前にアンチスキッド処理を行う。
さらに制御部120は、スキッド判定部122と、スキッド予測部124とによるスキッドの判定と予測に基づいて、協調動作生成部126において各制御要素(具体的には、ブレーキ制御部132、電力制御部134、エンジン制御部136、トランスミッション制御部138)を協調的に動作させて、スキッド発生を回避、あるいは速やかにグリップを回復させるように協調動作を生成し、各制御要素に制御指令値として指令する。
ステップS22は、制御部120のスキッド判定部122における処理である。このステップS22では、スキッド判定部122は、入力される情報に基づいて、スキッド状態であるか否かのスキッド判定を行う。具体的には、スキッド判定部122は、入力される前輪回転数及び後輪回転数を用いて算出した前輪加速度、後輪加速度及びバンク角とから、現在のスキッドの状態を表現する状態値(スキッド状態値)を算出し、スキッド判定の適合値として予め記憶されたテーブル閾値と比較する。これにより、現在のスキッドの状態を表現する状態値(スキッド状態値)が、適合値に適合していない場合、つまり、予め設定されたスキッド判定値を超えている場合、スキッドしている状態(スキッド状態)にあると判断して、ステップS23に移行する。また、ステップS22の処理において、スキッド状態にない場合、処理を終了する。この処理の終了後、ステップS10に戻り、これら一連の処理は、自動二輪車10の駆動中、繰り返し行われる。
ステップS23は、制御部120の協調動作生成部126における処理である。ステップS23では、協調動作生成部126は、スキッド判定部122の判定に基づき、スキッド状態から抜ける(グリップ状態へ回復させる)ために、すでに起こっているスキッド状態に対するパッシブアンチスキッド処理を開始する。また、このステップS23では、協調動作生成部126は、さらに後述するステップS24、ステップS26、ステップS28においてスキッドが生じた要因を特定する前に、「規制運転モード」を開始する。この「規制運転モード」は、ABS油圧ユニット133、エンジン本体6、発電機66、変速機7等の駆動制御を規制したモードである。
ここで、ステップS23では、協調動作生成部126により「規制運転モード」を開始すると、例えばシフト操作検出部118において変速指示が入力されても変速機7の変速動作は禁止される。また、「規制運転モード」を開始すると、アクセル操作量検出部114において入力されるアクセル操作に対しては、スキッドが判定されていない場合に較べて、スロットルの作動が緩慢になるように規制される。さらに、「規制運転モード」を開始すると、駆動あるいは回生を行っていた発電機66は、その出力トルクを規制される。さらに、「規制運転モード」を開始すると、ABS油圧ユニット133では、待機油圧の昇圧を開始してABS油圧ユニットのアンチロック制動動作を準備する。
ステップS24はスキッド判定部122における処理である。ステップS24では、スキッド判定部122は、入力された情報に基づいてブレーキ操作によるスキッドであるか否かを判定する。この判定の結果、ブレーキ操作によるスキッドであれば、ステップS25に移行し、ブレーキ操作によるスキッドでなければ、ステップS26に移行する。
ステップS25は協調動作生成部126における処理である。ステップS25では、制御部120の協調動作生成部126は、ステップS24の判定結果に基づいて、主にはブレーキ制御部132(図5参照)に指令してパッシブアンチロック制動動作を行う。
すなわち、ステップS25では、協調制御生成部126は、車輪のグリップが回復するようにブレーキ制御部132への制御指令値を生成して出力する。これを受けたブレーキ制御部132(図5参照)は、ABS油圧ユニット133(図5参照)を介して、ブレーキの駆動を制御してブレーキのアンチロック制動動作を行う。具体的には、ブレーキ操作によるスキッド状態中に、ブレーキ操作による制動度合いを減らすことで、このブレーキ操作により生み出される制動力を、路面と車輪(前輪4及び/又は駆動輪(後輪)13)とで生じる摩擦力より小さい状態にする動作を繰り返す。これにより、車輪と路面との摩擦力が制動力を上回る状態を確保して、車輪(前輪4及び/又は後輪13)のグリップを回復させる。
さらに、ステップS25では、図5に示す協調動作生成部126は、電力制御部134を介して発電機66、DC/DCコンバータ144と、エンジン制御部136を介してエンジン8(エンジン本体6)のスロットルバルブと、をブレーキのアンチロック制動動作を支援するよう協調的に動作する制御指令値を生成して、それぞれを駆動する。また、ステップS25では、協調制御生成部126は、トランスミッション制御部138に変速機7のクラッチ断接やシフト変更を規制する制御を指令する。ステップS25では、協調制御生成部126が生成するこれらの協調動作により、車輪のグリップを速やかに回復させて、処理は終了する。
ステップS26はスキッド判定部122における処理である。ステップS26では、スキッド判定部122は、入力された情報に基づいて、アクセル閉操作によるスキッドであるか否かを判定する。ステップS26での判定が、アクセル閉操作によるスキッドであれば、ステップS27に移行し、アクセル閉操作によるスキッドでなければ、ステップS28に移行する。
ステップS27は協調動作生成部126における処理である。ステップS27では、制御部120における協調動作生成部126は、ステップS26の判定結果に基づいて、主にはトランスミッション制御部138に指令して、パッシブアンチスキッド処理であるバックトルクリミッタ制御動作を行う。
すなわち、ステップS27では、協調動作生成部126は、変速機7で第1及び第2クラッチ(741、742)のトルク伝達容量を制限する。これにより、エンジン本体6(詳細にはクランクシャフト60)から駆動輪(後輪)13に伝達され、且つ、減速力(エンジンブレーキ)として作用しているバックトルクを、路面と車輪(駆動輪13)とで生じる摩擦力より小さい状態にする動作(バックトルクリミッタ動作)を行う。これにより、車輪と路面との摩擦力が減速力(バックトルクに相当)を上回る状態を確保して、車輪のグリップを回復させる。
さらに、ステップS27では、協調動作生成部126は、電力制御部134を介して発電機66、DC/DCコンバータ144と、エンジン制御部136を介してスロットルバルブと、をクラッチのバックトルクリミッタ制御動作を支援するよう協調的に動作する制御指令値を生成する。加えて、これら生成した制御指令値を、協調動作生成部126は、電力制御部134、エンジン制御部136に出力することで、発電機66、DC/DCコンバータ144及びスロットルバルブをそれぞれ駆動する。これら発電機66、DC/DCコンバータ144及びスロットルバルブの駆動を介して、協調動作生成部126は、クラッチのバックトルクリミッタ制御動作を支援する。このように、ステップS27では、協調制御生成部126が生成するこれらの協調動作により、車輪のグリップを速やかに回復させて、処理は終了する。
ステップS28はスキッド判定部122における処理である。ステップS28では、スキッド判定部122は、入力された情報に基づいて、アクセル開操作によるスキッドであるか否かを判定し、アクセル開操作によるスキッドであれば、ステップS29に移行し、アクセル開操作によるスキッドでなければ、処理を終了する。この処理の終了後、ステップS10に戻り、これら一連の処理は、自動二輪車10の駆動中、繰り返し行われる。
ステップS29は、制御部120の協調動作生成部126における処理である。ステップS29では、協調動作生成部126は、ステップS28の判定結果に基づいて、主にはエンジン制御部136に指令してパッシブアンチスキッド処理であるトラクション制御動作を行う。
すなわち、ステップS29では、協調制御生成部126は、エンジン本体6(詳細にはクランクシャフト60)から後輪(駆動輪)13に伝達され、且つ、加速力(駆動力)として作用しているエンジントルクを制限することで、加速力を路面と車輪(ここでは、駆動輪である後輪13)とで生じる摩擦力より小さい状態にするトラクション制御動作を行う。これにより、車輪(後輪13)と路面との摩擦力が加速力を上回る状態を確保して、車輪のグリップを回復させる。言い換えれば、ステップS29において、エンジン制御部136は、協調動作生成部126から指令されるトラクション制御動作の指令を受けて、スロットルバルブ開度と点火とを制御して、エンジン本体6から車輪(後輪13)に伝達されるエンジントルクを減じるトラクション制御動作を行う。
また、ステップS29では、協調制御生成部126は、電力制御部134とトランスミッション制御部138に対しては、エンジン制御部136によるトラクション制御動作を支援するよう協調的に動作する制御指令値を生成して、それぞれに指令する。これにより、電力制御部134は、発電機66とDC/DCコンバータ144とを制御して、発電機66への発電負荷を増して、即ちエンジン本体6から車輪(駆動輪である後輪)13に伝達されるエンジントルクを減じて、トラクション制御動作を支援する。さらに、トランスミッション制御部138は、協調制御生成部126からの指令に基づき、変速機7のクラッチ断接やシフト変更を規制する。ステップS29では、協調制御生成部126が生成するこれらの協調動作により、車輪(駆動輪である後輪13)における加速力が減じられ、車輪(後輪13)のグリップを速やかに回復されて、処理は終了する。
一方、制御部120では、スキッド判定部122(図5参照)を含む機能を用いて上述したようなパッシブにアンチスキッドする処理を行うとともに、スキッド予測部124(図5参照)を用いて、アクティブにアンチスキッドする処理を行う。
ステップS32は、制御部120のスキッド予測部124における処理である。ステップS32では、制御部120のスキッド予測部124が、スキッドになる可能性があるか否か、つまり、スキッド状態になる前に、スキッド状態になりそうか否かを予測して判定する(スキッド予測判定を行う)。
具体的には、スキッド予測部124は、入力される車両の運転状態および運転者の操作についての情報と、制御部120に予め記憶される車両の諸元とを用いて、現在の運転状況からスキッド発生に至るまでの余裕を表現する状態値(スキッド余裕値)を算出する。スキッド予側部124は、算出したスキッド余裕値と、予め記憶されたスキッド発生予測の判定値となる適合値とを比較する。この比較により、スキッド発生を予測してアンチスキッド処理を行う。
スキッド予測部124で用いられる適合値は、スキッド発生が予測される車両の駆動状態に適合するスリップ限界推力を示す値である。この適合値を超えると、スキッドが発生する、或いは、発生する可能性が高くなる。
この適合値は、路面形状、及び、路面状態(乾いた路面、濡れた路面)等による路面μ(駆動輪と路面との路面摩擦係数)に基づいて、スキッド発生前の値として設定される。なお、適合値は、予め設定されていてもよい。適合値は、ここでは、スキッド判定部122によりスキッド状態であると判定された際に、制御部120に入力される。
本実施の形態では、適合値は、後輪への駆動力に対する後輪荷重の不足度合い(スリップ発生予測)の指標となる。
このように、ステップS32で、スキッド予側部124は、スキッドが発生しそうな状態、つまりスキッド発生の可能性が有るスキッド発生予測状態と判定すれば、ステップS33に移行し、スキッド発生予測状態で無ければ、処理を終了する。この処理は、終了後、ステップS10に戻り、これら一連の処理は、自動二輪車10の駆動中、繰り返し行われる。
ステップS33は、制御部120の協調動作生成部126における処理である。ステップS33では、協調動作生成部126は、スキッド発生を回避するために、アクティブアンチスキッド処理を開始する。また、このステップS33では、協調動作生成部126は、さらに後述するステップS34、ステップS36においてスキッドが生じると予測する要因を特定する前に、エンジン本体6、発電機66、変速機7等の駆動制御を規制した「規制運転モード」を開始する。
すなわち、ステップS33では、「規制運転モード」が開始されると、前述したように、例えばシフト操作検出部118において変速指示が入力されても変速機7の変速動作は禁止される。また、アクセル操作量検出部114において入力されるアクセル操作に対しては、スキッドが判定されていない場合に較べて、スロットルの作動を緩慢に規制される。さらに、駆動あるいは回生を行っていた発電機66は、その出力トルクを規制される。さらに、ABS油圧ユニット133では待機油圧の昇圧を開始してABS油圧ユニットのアンチロック制動動作を準備する。
ステップS34は、制御部120のスキッド予測部124における処理である。ステップS34では、スキッド予測部124は、入力される情報に基づいて、アクセル開操作、つまり、加速操作によるスキッド発生予測状態であるか否かを判定する。言い換えれば、ステップS34では、制御部120は、運転者が現在のアクセル開操作を継続した場合に、スリップ限度(スリップする可能性のある限界値)を超える見込みであるアクセル開操作を行っているか否かの判定によりスキッドが起きる可能性を予測して判定する。
具体的には、ステップS34では、スキッド予測部124は、タイヤ(駆動輪である後輪13)のスリップ限界推力と、このタイヤ(駆動輪)に作用する駆動力とを比較する。ステップS34で用いられるタイヤのスリップ限界推力は、後輪軸荷重、パッシブアンチスキッド処理で取得した路面摩擦係数(「路面μ」)により算出する。また、ステップS34で用いられるタイヤ(駆動輪である後輪13)に作用する駆動力は、エンジン回転数、ギア段及びアクセル開度から算出する。
またステップS34では、スキッド予測部124は、算出する駆動力(タイヤ(後輪13)に作用する駆動力)に、先に算出した駆動力と比較して、急激な増加方向の変化がある場合、この変化に応じて、スリップ限度を補正する。
この急激な駆動力の増加方向の変化は、算出した実際の駆動力が、先に算出した駆動力よりも所定値以上の値となる場合であり、シフトダウン(キックダウン)操作によるギア段の変更、あるいは、アクセルの急開操作などにより生じる。ここでは、スキッド予測部124は、入力される情報に基づいて、シフトダウン操作、あるいは、アクセル開度信号の微分値を監視することで、駆動力の増加方向への変化を判断する。
このようにステップS34における判定が、アクセル開操作によるスキッド発生予測状態であれば、ステップS35に移行し、アクセル開操作によるスキッド発生予測状態でなければ、ステップS36に移行する。
ステップS35は、制御部120の協調動作生成部126における処理である。ステップS35では、協調動作生成部126は、主には電力制御部134に指令して、発電機66を用いたアクティブアンチスキッド処理であるトラクション制御動作を行う。
すなわち、ステップS35では、協調制御生成部126は、エンジン本体6(詳細にはクランクシャフト60)から後輪(駆動輪)13に伝達され、且つ、加速力(駆動力)として作用しているエンジントルクを制限することで、加速力を路面と車輪(駆動輪である後輪13)とで生じる摩擦力より小さい状態に保つトラクション制御動作を行う。これにより、車輪(駆動輪である後輪13)と路面との摩擦力が加速力を上回る状態を確保して、車輪のスリップを回避させる。言い換えれば、ステップS35において、電力制御部134は、協調動作生成部126から指令されるトラクション制御動作の指令に基づいて、発電機66とDC/DCコンバータ144とを制御して(具体的には発電負荷を増して)、トラクション制御動作を行う。即ち、電力制御部134は、協調動作生成部126からトラクション制御動作の指令に基づいて、エンジン本体6から後輪(駆動輪)13に伝達されるエンジントルクを減じて、トラクション制御動作を行う。
また、ステップS35では、協調制御生成部126は、エンジン制御部136とトランスミッション制御部138に対しては、電力制御部134によるトラクション制御動作を支援するよう協調的に動作する制御指令値を生成して、それぞれに指令する。これにより、エンジン制御部136は、スロットル開度および点火を制御してエンジン本体6で発生するエンジントルクを減じ、即ち、エンジン本体6から後輪(駆動輪)13に伝達されるエンジントルクを減じて、トラクション制御動作を支援する。さらに、トランスミッション制御部138は、協調制御生成部126からの指令に基づき、変速機7のクラッチ断接やシフト変更を規制する。
このように、ステップS35では、協調制御生成部126は、電子制御部134、エンジン制御部136及びトランスミッション制御部138を協調動作させることで、後輪(駆動輪)13における加速力(駆動力)が減じられる。これにより、後輪(駆動輪)13のグリップは、そのグリップ限界推力を超えない範囲に保たれる。
なお、通常の運転に於いて、発電機66は、減速時に、クランクシャフト60のトルクを加勢する場合以外では、クランクシャフト60の回転により発電する。このため、発電機66は、通常の運転中では、クランクシャフト60による動力を使用している、つまり、クランクシャフト60の動力を吸収している。
これらステップS34及びステップS35では、制御部120(スキッド予測部124及び協調制御生成部126)は、運転者がスリップ限度を超えるアクセル開操作を行っても(ステップS34)、主には発電負荷を増やすように制御する(ステップS35)。
ステップS36は制御部120のスキッド予測部124における処理である。ステップS36では、スキッド予測部124は、入力される情報に基づいて、アクセル閉操作、つまり、負の加速操作である減速操作によるスキッド発生予測状態であるか否かを判定する。言い換えれば、ステップS36では、運転者がスリップ限度を超えるアクセル閉操作を行っているか否かを判定する。
具体的には、ステップS36では、スキッド予測部124は、タイヤ(駆動輪である後輪13)のスリップ限界推力と、このタイヤ(駆動輪である後輪13)に作用する負の駆動力(負の加速力)、つまり、減速力とを比較する。ステップS36で用いられるタイヤのスリップ限界推力は、ステップS34の処理と同様に、後輪軸荷重、パッシブアンチスキッド処理で取得した路面摩擦係数(「路面μ」)により算出される。また、ステップS36で用いられるタイヤ(駆動輪)に作用する減速力(負の駆動力、負の加速力)は、エンジン回転数、ギア段,アクセル開度から算出する。
また、ステップS36では、スキッド予測部124は、算出する駆動力(タイヤに作用する駆動力)に、先に算出した駆動力と比較して、急激な増加方向の変化がある場合、この変化に応じて、スリップ限度を補正する。
この急激な駆動力の増加方向の変化は、算出した実際の駆動力が、先に算出した駆動力よりも所定値以下の値となる場合であり、シフトダウンを伴う減速操作のギア変更に伴うエンジン回転数の引き上げ、あるいは、アクセルの急閉操作などにより生じる。
ここでは、スキッド予測部124は、入力される情報に基づいて、シフトダウン操作、あるいは、アクセル開度信号の微分値を監視することで、負の駆動力である減速力の増加方向への変化を判断する。
ステップS36における判定が、アクセル閉操作によるスキッド発生予測状態であれば、ステップS37に移行し、アクセル閉操作によるスキッド発生予測状態でなければ、処理を終了する。この処理は、終了後、ステップS10へ戻り、これら一連の処理は、自動二輪車10の駆動中、繰り返し行われる。処理を繰り返す。
ステップS37は、制御部120の協調制御生成部126の処理である。ステップS37では、協調制御生成部126は、主には電力制御部134を指令して、発電機66を用いたアクティブアンチスキッド処理であるバックトルクリミッタ動作を行う。
すなわち、ステップS37では、協調制御生成部126は、エンジン本体6(詳細にはクランクシャフト60)から後輪(駆動輪)13に伝達され、且つ、減速力(負の駆動力、負の加速力)として作用しているエンジントルクを制限する。これにより、協調制御生成部126は、路面と車輪(駆動輪である後輪13)とで生じる摩擦力よりも後輪13における減速力(演算上は減速力の絶対値)を小さい状態に保つバックトルクリミッタ動作を行う。これにより、ステップS37では、協調制御生成部126は、車輪(駆動輪である後輪13)と路面との摩擦力が、減速力を上回る状態を確保して、車輪のスリップを回避させる。言い換えれば、ステップS37において、電力制御部134は、協調動作生成部126から指令されるバックトルクリミッタ動作の指令に基づいて、発電機66とDC/DCコンバータ144とを制御してバックトルクリミッタ動作を行う。これら発電機66とDC/DCコンバータ144とを制御することで、電力制御部134は、エンジン本体6から後輪(駆動輪)13に伝達される負のエンジントルクを制限する動作であるバックトルクリミッタ動作を行う。具体的には、電力制御部134は、発電機66の発電負荷を減じ、乃至DC/DCコンバータ144を介してバッテリ142から発電機66へ電力を供給して駆動し、クランクシャフト60へ付加される発電機トルクを調節する。
また、ステップS37では、協調制御生成部126は、エンジン制御部136とトランスミッション制御部138に対しては、電力制御部134によるバックトルクリミッタ動作を支援するよう協調的に動作する制御指令値を生成して、それぞれに指令する。これにより、エンジン制御部136は、スロットル開度および点火を制御してエンジン本体6で発生するマイナスのエンジントルクを規制し、即ち、エンジン本体6から後輪(駆動輪)13に伝達されるエンジントルクを規制して、バックトルクリミッタ動作を支援する。さらに、トランスミッション制御部138は、協調制御生成部126からの指令に基づき、変速機7のクラッチ断接やシフト変更を規制する。
このように、ステップS37では、協調制御生成部126は、電子制御部134、エンジン制御部136及びトランスミッション制御部138を協調動作させることで、後輪(駆動輪)13における減速力(負の駆動力)が規制される。これにより、後輪(駆動輪)13のグリップは、そのグリップ限界推力を超えない範囲に保たれる。
これらステップS36及びステップS37では、制御部120(スキッド予測部124と協調制御生成部126)は、運転者がスリップ限度を超えるアクセル閉操作を行っても(ステップS36)、発電機66を制御(ステップS37)して、所定の減速力よりも強い減速力がタイヤに生じないようにする。言い換えれば、制御部120は、後輪13がスリップする前に、発電機66を制御して、駆動離13の減速トルクを調節する。
すなわち、車両の加速中、または、定常走行中においてアクセルを急閉した場合、シフトダウンを伴うことなく、後輪のスリップ限界を超える減速度に至る場合でも、スリップする前に回避できる。
図8は、アクセル急閉時における後輪の減速力を示す。
図8では、シフトダウンを伴うエンジンブレーキに因る後輪の減速力をグラフG1で示し、後輪がスリップしない減速力の限度を後輪減速力限度としてグラフG2〜G6で示す。なお、後輪減速力の限度は、雨、タイヤ等により変化する路面μを含む条件によって変化するものであり、ここでは、G2が一番滑りにくく、G6が一番滑り易い減速力の限度を示しており、G2〜G6に順に滑り易い。これらグラフG2〜G6で示す減速力の限度は、スキッド判定部122(図5参照)での判定で学習したもの、つまり、スキッド判定部122での判定で用いた情報に基づいて記憶して設定したもの、である。
図8のグラフG1で示すように、自動二輪車などの車両の加速中、または、定常走行中においてアクセルを急閉すると、エンジンブレーキが掛かり、シフトダウンにより階段状の減速力の強まりを伴い、領域Rを形成する部分を経て、車速が0になるまで減速する。しかしながら、車両の諸元や特性によっては、グラフG1において領域Rを形成する部分で示すように、後輪減速力が後輪減速限度(ここではG4とする)を下回る場合がある。これは、シフトダウンによってエンジン本体6(クランクシャフト60)から後輪13に伝達される減速力(エンジンブレーキ)が増加して、後輪13における減速力の限度(G4)を越えることに起因する。
回生機能を有する本実施の形態に係るパラレルハイブリッド式の自動二輪車10が同様に減速している最中では、減速に伴い、制御部120の制御によって発電機66に発電負荷して回生させる。このパラレルハイブリッド式の自動二輪車10では、減速している最中に回生を行うために、発電機66の発電負荷を大きくするよう制御する。これにより、回生機能を有するパラレルハイブリッド式の自動二輪車では、エンジン本体6(クランクシャフト60)の動力吸収(エンジンブレーキ)は、回生を行わない場合に比して、さらに大きくなってしまう虞がある。
一方、自動二輪車10では、領域Rを形成する部分に於いて、発電機66の発電負荷を減ずるよう電力制御部134で制御して、エンジン本体6(クランクシャフト60)から変速機7を介して後輪13に伝達される減速力(エンジンブレーキ)を弱める。即ち制御部120は、後輪減速力が後輪13に於ける減速力の限度(G4)を超えないように制御することが出来る。
さらに、このパラレルハイブリッド式の自動二輪車10では、領域Rを形成する部分に於いて、電力制御部134は、バッテリ142からDC/DCコンバータ144を介して発電機66へ電力を供給して、クランクシャフト60の回転を加勢駆動する。つまり、領域Rを形成する部分に於いて、電力制御部134は、エンジン本体6で発生するマイナストルクに駆動方向(プラス)のトルクを加える。この結果として、電力制御部134は、領域Rを形成する部分に於いて、クランクシャフト60から出力されるマイナストルクを減ずる制御を行う。これにより、エンジン本体6(クランクシャフト60)から後輪13に伝達される減速力(エンジンブレーキ)を弱める。即ち制御部120は、後輪減速力が後輪13に於ける減速力の限度(グラフG4)を超えないように制御することが出来る。
この点を鑑みて、本実施の形態では、ステップS37において、発電機66でクランクシャフト60の回転を加勢する制御を行う。これにより、アクセル操作によりアクセルを急閉することで、つまり、アクセル急閉で、エンジンブレーキによる減速を行っても、スリップさせることなく、マイナスの加速、つまり、減速を含む、加速性能を向上させることができる。
このように、本実施の形態の自動二輪車10におけるアンチスキッド装置は、車両の推進力を出力するエンジン本体6と、発電機66と、バッテリ142と、変速機7とを有するハイブリッド車両に搭載される。発電機66は、エンジン本体6のクランクシャフト60に連結され、エンジン本体6の出力にトルクを加勢して補助駆動力を発生するとともに、クランクシャフト60の回転トルクにより駆動して発電可能である。バッテリ142は、発電機66に電力を供給するとともに、発電機66の発電した電力を蓄電可能である。変速機7は、クランクシャフト60の回転を変速して後輪13に伝達する。
このアンチスキッド装置は、発電機66を制御する制御部120を有し、この制御部120は、車両減速度が所定値以上の急減速時或いは変速機7を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、発電機66を制御して、以下のように、駆動輪13の減速トルクを調節する。具体的には、発電機66を制御して、発電機66の発電量を減少させる動作から、クランクシャフト60を加勢駆動する動作まで変化させる。
これにより、後輪13の減速トルクを調節する。また、制御部120は、入力される車速、加減速度、変速シフト段、エンジン回転数、アクセル操作量に基づいて、発電機66によるクランクシャフト60への加勢駆動および発電機66の回生駆動を制御する。
すなわち、制御部120は、入力される車速、加減速度、変速機のシフト段、シフト段を変更する操作である変速操作、エンジン回転数及びアクセル操作量に基づいて、前記発電機66を制御して、発電機66の発電量を減少させる動作を含む回生電力吸収動作から前記クランク軸の加勢駆動動作までを制御する。
また、制御部120はスリップ検出部として、入力される車速、加減速度及び車輪回転数に基づいて、後輪13のスリップを検出する。制御部120は、車両の減速中における後輪13のスリップを検知して、後輪13に生じる減速トルクを減じるように、発電機66を制御してエンジン本体6を駆動する。
よって、加減速度による走行中において、具体的には、マイナスの加速である減速中、或いは、加速中において、発電機66で回生を行わず、発電機66の発電負荷を減らして、クランクシャフト60を介して後輪13への駆動力を加勢領域Rで加勢する。これにより、車両の減速性能の向上を図ることができる。
なお、本実施の形態のアンチスキッド装置は、第1クラッチ741、第2クラッチ742を備えるデュアルクラッチ式の変速機7に用いられる構成としたが、シングルクラッチに用いられる構成としてもよい。この場合でも、自動二輪車10に搭載されたアンチスキッド装置と同様の作用効果を得ることができる。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
本発明に係るアンチスキッド装置は、パラレルハイブリッド式の車両に搭載されて、駆動輪のスリップを確実に回避できる効果を有し、特にツインクラッチ式の変速装置が搭載される自動二輪車の制御に適用される装置として有用である。
4 前輪
6 エンジン本体
7 変速機
8 エンジン
9 シート
10 二輪車
13 後輪(駆動輪)
14 ドライブチェーン
15 ドリブンスプロケット
60 クランクシャフト(クランク軸)
65 駆動部
66 発電機(発電電動機)
68 ピストン
69 コンロッド
73 ドライブシャフト(出力軸)
75 変速ギア群(変速ギア機構)
77、772 プルロッド
90 バランスシャフト
112 ブレーキ操作量検出部
114 アクセル操作量検出部
116 クラッチ操作量検出部
118 シフト操作検出部
120 制御部
122 スキッド判定部(スリップ検出部)
124 スキッド予測部
126 協調動作生成部
132 ブレーキ制御部
133 ABS油圧ユニット
134 電力制御部(発電機制御部)
136 エンジン制御部
138 トランスミッション制御部
142 バッテリ
144 DC/DCコンバータ
621、622、623、624、625 ジャーナル
639 ギア
641、642、643、644 クランクピン
651 カムギア
652 カムチェーン
654 カム動弁軸
656 プラグ
661 ロータ
662 ステータ
671、672、673、674 シリンダ
711 第1メインシャフト(第1入力主軸)
712 第2メインシャフト(第2入力主軸)
721 第1減大ギア
722 第2減大ギア
741 第1クラッチ
742 第2クラッチ
810 クランクケース
811 内壁
830 ミッションケース
6 エンジン本体
7 変速機
8 エンジン
9 シート
10 二輪車
13 後輪(駆動輪)
14 ドライブチェーン
15 ドリブンスプロケット
60 クランクシャフト(クランク軸)
65 駆動部
66 発電機(発電電動機)
68 ピストン
69 コンロッド
73 ドライブシャフト(出力軸)
75 変速ギア群(変速ギア機構)
77、772 プルロッド
90 バランスシャフト
112 ブレーキ操作量検出部
114 アクセル操作量検出部
116 クラッチ操作量検出部
118 シフト操作検出部
120 制御部
122 スキッド判定部(スリップ検出部)
124 スキッド予測部
126 協調動作生成部
132 ブレーキ制御部
133 ABS油圧ユニット
134 電力制御部(発電機制御部)
136 エンジン制御部
138 トランスミッション制御部
142 バッテリ
144 DC/DCコンバータ
621、622、623、624、625 ジャーナル
639 ギア
641、642、643、644 クランクピン
651 カムギア
652 カムチェーン
654 カム動弁軸
656 プラグ
661 ロータ
662 ステータ
671、672、673、674 シリンダ
711 第1メインシャフト(第1入力主軸)
712 第2メインシャフト(第2入力主軸)
721 第1減大ギア
722 第2減大ギア
741 第1クラッチ
742 第2クラッチ
810 クランクケース
811 内壁
830 ミッションケース
Claims (7)
- 車両の推進力として、クランク軸より回転動力を出力するエンジンと、前記エンジンの前記クランク軸に連結され、当該クランク軸の出力にトルクを加勢して補助駆動力を発生するとともに、当該クランク軸のトルクにより駆動され発電可能な発電電動機と、
前記発電電動機に電力を供給するとともに、前記発電電動機の発電した電力を蓄電可能なバッテリと、
前記クランク軸の回転を変速して駆動輪に伝達する変速機と、
を有するハイブリッド車両のアンチスキッド装置であって、
車両減速度が所定値以上の急減速時或いは前記変速機を介したシフトダウンを伴う減速時において、エンジン回転数が所定の回転数より高い場合、
前記発電電動機を制御して、当該発電電動機の発電量を減少させる動作から、前記クランク軸を加勢駆動する動作まで、変化させることにより、前記駆動輪の減速トルクを調節する発電機制御部を有する、
アンチスキッド装置。 - 前記発電機制御部は、前記駆動輪がスリップする前に、前記発電電動機を制御して、前記駆動輪の減速トルクを調節する、
請求項1記載のアンチスキッド装置。 - 前記発電機制御部は、入力される車速、加減速度、変速機のシフト段、前記シフト段を変更する操作である変速操作、エンジン回転数及びアクセル操作量に基づいて、前記発電電動機を制御して、前記発電電動機の発電量を減少させる動作を含む回生電力吸収動作から前記クランク軸の加勢駆動動作までを制御する、
請求項1または2記載のアンチスキッド装置。 - 入力される前記車速、前記加減速度及び車輪回転数に基づいて、前記駆動輪のスリップを検出するスリップ検出部を有し、
前記スリップ検出部は、前記車両の減速中における前記駆動輪のスリップを検知して、前記駆動輪に生じる減速トルクを減じるように、前記発電電動機を制御して前記エンジンを駆動する、
請求項1から3のいずれか1項に記載のアンチスキッド装置。 - 前記変速機は、
前記クランク軸から回転動力が伝達される第1クラッチ及び第2クラッチと、
回転して駆動力を駆動輪に出力する出力軸と、
前記クランク軸と平行に配置されるとともに、前記第1クラッチの接続によって前記回転動力が入力され、奇数段の変速ギア段として設定される奇数段変速ギア機構を介して回転を前記出力軸に伝達する第1入力主軸と、
前記クランク軸と平行に配置されるとともに、前記第2クラッチの接続によって前記回転動力が入力され、偶数段の変速ギア段として設定される偶数段変速ギア機構を介して回転を前記出力軸に伝達する第2入力主軸とを備える、
請求項1から4のいずれか一項に記載のアンチスキッド装置。 - 請求項1から5のいずれか一項に記載のアンチスキッド装置を備える車両。
- 請求項1から5のいずれか一項に記載のアンチスキッド装置を備える二輪車。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013073607A JP2014196096A (ja) | 2013-03-29 | 2013-03-29 | アンチスキッド装置、車両及び自動二輪車 |
| EP14161626.8A EP2783937B1 (en) | 2013-03-29 | 2014-03-26 | Antiskid apparatus, antiskid control method, vehicle, and motorcycle |
| US14/228,587 US9126586B2 (en) | 2013-03-29 | 2014-03-28 | Antiskid apparatus, vehicle, and motorcycle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013073607A JP2014196096A (ja) | 2013-03-29 | 2013-03-29 | アンチスキッド装置、車両及び自動二輪車 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014196096A true JP2014196096A (ja) | 2014-10-16 |
Family
ID=50349499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013073607A Pending JP2014196096A (ja) | 2013-03-29 | 2013-03-29 | アンチスキッド装置、車両及び自動二輪車 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9126586B2 (ja) |
| EP (1) | EP2783937B1 (ja) |
| JP (1) | JP2014196096A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2016124962A1 (ja) * | 2014-12-10 | 2017-09-14 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 車両用のトルク制御装置およびトルク制御方法 |
| JP2020142566A (ja) * | 2019-03-04 | 2020-09-10 | 株式会社シマノ | 評価装置、制御システム、報知システム、学習モデルの生成方法、コンピュータプログラム、および、記憶媒体 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6424380B2 (ja) * | 2014-12-16 | 2018-11-21 | ヤマハ発動機株式会社 | 車両用変速システム |
| US9580129B2 (en) * | 2015-05-13 | 2017-02-28 | Burromax LLC | Assembly comprising an internal combustion engine selectively couple to generator and to another mechanically driven device |
| WO2016203452A1 (en) * | 2015-06-17 | 2016-12-22 | Consortium De Recherche Brp – Universite De Sherbrooke S.E.N.C. | Regenerative braking system and method |
| US9873433B2 (en) | 2016-03-09 | 2018-01-23 | Bendix Commercial Vehicle Systems Llc | System and method for controlling torque to a driveshaft |
| GB2581631B (en) * | 2017-10-11 | 2022-09-07 | Cummins Inc | Torque deration in response traction control events |
| US11299229B2 (en) | 2018-04-27 | 2022-04-12 | FUELL Inc. | Electric saddle type vehicle chassis |
| US11654996B2 (en) | 2018-04-27 | 2023-05-23 | FUELL Inc. | Electric saddle type vehicle |
| US11753101B2 (en) | 2018-04-27 | 2023-09-12 | FUELL Inc. | Electric saddle type vehicle with storage areas |
| JP6982543B2 (ja) * | 2018-05-15 | 2021-12-17 | 本田技研工業株式会社 | ハイブリッド車両の駆動装置 |
| JP2020041481A (ja) * | 2018-09-11 | 2020-03-19 | 川崎重工業株式会社 | 発電システム及びそれを備える推進装置 |
| WO2020118233A1 (en) * | 2018-12-06 | 2020-06-11 | FUELL Inc. | Brake system for saddle-type vehicle |
| JP7185517B2 (ja) * | 2018-12-18 | 2022-12-07 | カワサキモータース株式会社 | ハイブリッド式リーン車両の制御装置 |
| JP7171528B2 (ja) * | 2019-09-17 | 2022-11-15 | 日立建機株式会社 | 運搬車両 |
| JP7222865B2 (ja) * | 2019-10-02 | 2023-02-15 | カワサキモータース株式会社 | クイックシフタ付き乗物の制御装置及び自動二輪車 |
| CN115139822B (zh) * | 2022-03-30 | 2023-08-08 | 比亚迪股份有限公司 | 车辆的扭矩控制方法及存储介质、电子设备、车辆 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0443832A (ja) * | 1990-06-08 | 1992-02-13 | Honda Motor Co Ltd | 多段変速機のシフトショック低減装置 |
| JPH05270387A (ja) * | 1992-03-27 | 1993-10-19 | Toyota Motor Corp | 電気自動車の制動制御装置 |
| JPH11189067A (ja) * | 1997-12-25 | 1999-07-13 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2007312596A (ja) * | 2006-05-17 | 2007-11-29 | Piaggio & C Spa | 電気駆動の四輪ローリング車両 |
| JP2009061855A (ja) * | 2007-09-05 | 2009-03-26 | Toyota Motor Corp | 車両の制駆動力制御装置 |
| JP2010208603A (ja) * | 2009-03-12 | 2010-09-24 | Honda Motor Co Ltd | 車両用パワーユニット |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5450324A (en) * | 1993-01-07 | 1995-09-12 | Ford Motor Company | Electric vehicle regenerative antiskid braking and traction control system |
| US5358317A (en) * | 1993-01-07 | 1994-10-25 | Ford Motor Company | Fuzzy logic electric vehicle regenerative antiskid braking and traction control system |
| US7281770B1 (en) * | 2000-08-08 | 2007-10-16 | Ford Global Technologies, Llc | System and method for regenerative and antiskid braking within an electric vehicle |
| JP3646632B2 (ja) | 2000-08-10 | 2005-05-11 | マツダ株式会社 | 車両の走行制御装置 |
| US6932738B2 (en) * | 2002-12-26 | 2005-08-23 | Honda Motor Co., Ltd. | Drive control apparatus for hybrid vehicle |
-
2013
- 2013-03-29 JP JP2013073607A patent/JP2014196096A/ja active Pending
-
2014
- 2014-03-26 EP EP14161626.8A patent/EP2783937B1/en active Active
- 2014-03-28 US US14/228,587 patent/US9126586B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0443832A (ja) * | 1990-06-08 | 1992-02-13 | Honda Motor Co Ltd | 多段変速機のシフトショック低減装置 |
| JPH05270387A (ja) * | 1992-03-27 | 1993-10-19 | Toyota Motor Corp | 電気自動車の制動制御装置 |
| JPH11189067A (ja) * | 1997-12-25 | 1999-07-13 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2007312596A (ja) * | 2006-05-17 | 2007-11-29 | Piaggio & C Spa | 電気駆動の四輪ローリング車両 |
| JP2009061855A (ja) * | 2007-09-05 | 2009-03-26 | Toyota Motor Corp | 車両の制駆動力制御装置 |
| JP2010208603A (ja) * | 2009-03-12 | 2010-09-24 | Honda Motor Co Ltd | 車両用パワーユニット |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2016124962A1 (ja) * | 2014-12-10 | 2017-09-14 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 車両用のトルク制御装置およびトルク制御方法 |
| JP2020142566A (ja) * | 2019-03-04 | 2020-09-10 | 株式会社シマノ | 評価装置、制御システム、報知システム、学習モデルの生成方法、コンピュータプログラム、および、記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2783937B1 (en) | 2019-06-19 |
| EP2783937A3 (en) | 2018-10-31 |
| EP2783937A2 (en) | 2014-10-01 |
| US9126586B2 (en) | 2015-09-08 |
| US20140297079A1 (en) | 2014-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014196096A (ja) | アンチスキッド装置、車両及び自動二輪車 | |
| US10272913B2 (en) | Regenerative braking system and method | |
| JP3744414B2 (ja) | 車両の制御装置 | |
| US7784575B2 (en) | Hybrid vehicle drive control system | |
| EP1783021A2 (en) | Hybrid vehicle control | |
| EP2760692B1 (en) | Hybrid vehicle drivetrain | |
| KR101353767B1 (ko) | 하이브리드 차량용 구동 장치 | |
| JP4008437B2 (ja) | パワーモジュールの駆動制御装置、及び、ハイブリッド車両 | |
| CN103282253B (zh) | 混合动力车辆的发动机起动控制设备 | |
| US20070080005A1 (en) | Hybrid vehicle drive control system | |
| JP5637217B2 (ja) | 車両の回生制動制御装置 | |
| JP4270459B2 (ja) | 無段変速機構の制御装置 | |
| JP2006226440A (ja) | ハイブリッド車両の電動オイルポンプ制御装置 | |
| CN103781655A (zh) | 电动车辆 | |
| JP3614089B2 (ja) | ハイブリッド車の走行制御装置 | |
| JP6550188B2 (ja) | ハイブリッド鞍乗り型車両 | |
| US20140163799A1 (en) | Vehicle drive control apparatus | |
| RU2750961C2 (ru) | Способ управления мотором транспортного средства | |
| JP4967671B2 (ja) | ハイブリッド車両のエンジン失火検出制御装置 | |
| WO2018173670A1 (ja) | ハイブリッド車両 | |
| JP6554030B2 (ja) | ハイブリッド車両の制御装置 | |
| RU2708808C2 (ru) | Способ торможения двигателем транспортного средства с бесступенчатой трансмиссией | |
| JP2010269642A (ja) | ハイブリッド車両の制動制御装置 | |
| JP6912339B2 (ja) | ハイブリッド車両のパワーユニット | |
| JPWO2019003500A1 (ja) | 車両用変速システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150210 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150616 |