JP2014128751A - 汚泥掻き寄せ装置 - Google Patents
汚泥掻き寄せ装置 Download PDFInfo
- Publication number
- JP2014128751A JP2014128751A JP2012286754A JP2012286754A JP2014128751A JP 2014128751 A JP2014128751 A JP 2014128751A JP 2012286754 A JP2012286754 A JP 2012286754A JP 2012286754 A JP2012286754 A JP 2012286754A JP 2014128751 A JP2014128751 A JP 2014128751A
- Authority
- JP
- Japan
- Prior art keywords
- flight
- support
- mounting
- guide rail
- flight plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
Abstract
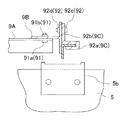
【解決手段】支軸間に巻回された一対の無端チェーン4に取り付けられた複数のフライト板5がガイドレール7に沿って走行し、沈殿池の池底に堆積した汚泥を掻き寄せる汚泥掻き寄せ装置であって、フライト板5を挟んでガイドレール7と対向する側に、フライト板5の浮きを阻止する押え部材8が、沈殿池の壁面に固定され押え部材側8に突出するように配置された支持部材9Aと、押え部材側への取付け位置を調整可能な第1締付け機構91を介して支持部材9Aに取り付けられる第1取付け部材9Bと、フライト板5と押え部材8との離隔距離h1を調整可能な第2締付け機構92を介して押え部材8を第1取付け部材9Bに固定する第2取付け部材9Cとからなる支持機構を介して支持されている。
【選択図】図4
Description
図1(a)及び図2に示すように、汚泥掻き寄せ装置2は、例えば下水処理場の最初沈殿池や最終沈殿池等の沈殿池1に設置され、複数の支軸3a,3b,3c,3d間に巻回された一対の無端チェーン4,4と、無端チェーン4,4に取り付けられた複数のフライト板5と、無端チェーン4,4の走行に伴って移動するフライト板5を支持する長尺のガイドレール6,7とを備えている。
図9(a)から(d)には、上述した支持機構9で支持されるパイプ状の押え部材8の取付け構造が示されている。
2:汚泥掻き寄せ装置
3a,3b,3c,3d:支軸
4:無端チェーン
5:フライト板
6,7:ガイドレール
8:押え部材
9:支持機構
9A:支持部材
9B:第1取付け部材
9C:第2取付け部材
91:第1固定機構
92:第2固定機構
Claims (7)
- 複数の支軸間に巻回された一対の無端チェーンと、前記無端チェーンに取り付けられた複数のフライト板と、前記無端チェーンの走行に伴って移動する前記フライト板を支持する長尺のガイドレールとを備え、沈殿池の池底に堆積した汚泥を前記フライト板で掻き寄せる汚泥掻き寄せ装置であって、
前記フライト板を挟んで前記ガイドレールと対向する側に、前記フライト板の浮きを阻止する押え部材が支持機構を介して前記ガイドレールの延出方向に沿って配置され、
前記支持機構は、前記沈殿池の壁面に直接または間接的に固定され前記押え部材側に突出するように配置された支持部材と、前記押え部材を前記支持部材へ取り付ける取付け部材とを備えて構成され、
前記取付け部材は、前記押え部材の支持部材への取付け位置、前記フライト板と前記押え部材との離隔距離、及び前記ガイドレールの延出方向に対する前記取付け部材の支持位置を調整可能に構成されている汚泥掻き寄せ装置。 - 前記取付け部材は、前記押え部材側への取付け位置を調整可能な第1固定機構を介して前記支持部材に取り付けられる第1取付け部材と、前記フライト板と前記押え部材との離隔距離及び前記押え部材の延出方向に対する前記第1取付け部材の支持位置を調整可能な第2固定機構を介して前記押え部材を前記第1取付け部材に固定する第2取付け部材とで構成されている請求項1記載の汚泥掻き寄せ装置。
- 前記押え部材が断面L字状のアングル部材で構成され、前記第2取付け部材は、前記アングル部材の一側端に係合する係合部と、前記係合部と前記第1取付け部材との間に前記押え部材を挟みつけた状態で、前記離隔距離を調整可能に前記第1取付け部材に締め付ける固定部とを備えている請求項2記載の汚泥掻き寄せ装置。
- 前記押え部材が、前記ガイドレールの延出方向に沿って配置され前記フライト板の浮きを阻止するパイプ部材と、一端側で前記パイプ部材を保持して他端側で前記取付け部材に保持される保持部材とで構成されている請求項1または2記載の汚泥掻き寄せ装置。
- 前記取付け部材は、前記押え部材の支持部材への取付け位置、前記フライト板と前記押え部材との離隔距離、及び前記ガイドレールの延出方向に対する前記取付け部材の支持位置を調整可能な固定機構を備え、前記固定機構が前記取付け部材の一方に形成された長孔と、前記長孔を介して前記取付け部材を位置決めした後に締付けるボルトとナットで構成されている請求項1から4の何れかに記載の汚泥掻き寄せ装置。
- 前記ガイドレール上を摺動するガイドシューが前記フライト板の上下両面に取り付けられ、前記支持機構によって、前記ガイドレール上を摺動するガイドシューとは反対側のガイドシューに対向する位置に前記押え部材が位置決めされている請求項1から5の何れかに記載の汚泥掻き寄せ装置。
- 前記沈殿池の上層に配置された支軸から下層に配置された支軸にかけて前記無端チェーンが巻回され、少なくとも前記上層に配置された支軸に巻回された前記無端チェーンに対して前記抑え部材が配置されている請求項1から6の何れかに記載の汚泥掻き寄せ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012286754A JP6042717B2 (ja) | 2012-12-28 | 2012-12-28 | 汚泥掻き寄せ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012286754A JP6042717B2 (ja) | 2012-12-28 | 2012-12-28 | 汚泥掻き寄せ装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016219537A Division JP6349373B2 (ja) | 2016-11-10 | 2016-11-10 | 汚泥掻き寄せ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014128751A true JP2014128751A (ja) | 2014-07-10 |
| JP6042717B2 JP6042717B2 (ja) | 2016-12-14 |
Family
ID=51407665
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012286754A Active JP6042717B2 (ja) | 2012-12-28 | 2012-12-28 | 汚泥掻き寄せ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6042717B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015120166A (ja) * | 2015-03-09 | 2015-07-02 | 水ing株式会社 | 汚泥掻き寄せ機 |
| JP2016147220A (ja) * | 2015-02-10 | 2016-08-18 | Jfeエンジニアリング株式会社 | 汚泥掻寄機 |
| JP2016209839A (ja) * | 2015-05-12 | 2016-12-15 | 株式会社日立プラントサービス | 汚泥掻寄機のチェーン送り装置 |
| JP6273344B1 (ja) * | 2016-12-28 | 2018-01-31 | クボタ環境サ−ビス株式会社 | 汚泥掻き寄せ装置 |
| CN114307271A (zh) * | 2021-12-16 | 2022-04-12 | 江苏苏淮环境工程有限公司 | 一种环保用一体化高效非金属链板式刮砂机 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63193504U (ja) * | 1987-05-30 | 1988-12-13 | ||
| JPH0330804A (ja) * | 1989-06-27 | 1991-02-08 | Asahi Tec Corp | 沈澱分離装置 |
| JPH08281010A (ja) * | 1995-02-16 | 1996-10-29 | Mitsuhiro Fujiwara | 災害に対する保全装置 |
| JP2004028218A (ja) * | 2002-06-26 | 2004-01-29 | Hitachi Plant Eng & Constr Co Ltd | 汚泥掻寄機のチェーン歯飛び防止装置 |
| JP2006326483A (ja) * | 2005-05-26 | 2006-12-07 | Ebara Corp | 汚泥掻寄せ機 |
| JP2009262023A (ja) * | 2008-04-23 | 2009-11-12 | Hitachi Plant Technologies Ltd | 汚泥掻寄機におけるチェーン歯飛び防止装置 |
| JP5065513B1 (ja) * | 2011-07-01 | 2012-11-07 | 水ing株式会社 | 汚泥掻寄せ機 |
| JP2012232260A (ja) * | 2011-05-02 | 2012-11-29 | Hitachi Plant Technologies Ltd | 汚泥掻寄機 |
| JP2013010085A (ja) * | 2011-06-30 | 2013-01-17 | Sumitomo Heavy Industries Environment Co Ltd | 汚泥掻寄機 |
| JP2015120166A (ja) * | 2015-03-09 | 2015-07-02 | 水ing株式会社 | 汚泥掻き寄せ機 |
-
2012
- 2012-12-28 JP JP2012286754A patent/JP6042717B2/ja active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63193504U (ja) * | 1987-05-30 | 1988-12-13 | ||
| JPH0330804A (ja) * | 1989-06-27 | 1991-02-08 | Asahi Tec Corp | 沈澱分離装置 |
| JPH08281010A (ja) * | 1995-02-16 | 1996-10-29 | Mitsuhiro Fujiwara | 災害に対する保全装置 |
| JP2004028218A (ja) * | 2002-06-26 | 2004-01-29 | Hitachi Plant Eng & Constr Co Ltd | 汚泥掻寄機のチェーン歯飛び防止装置 |
| JP2006326483A (ja) * | 2005-05-26 | 2006-12-07 | Ebara Corp | 汚泥掻寄せ機 |
| JP2009262023A (ja) * | 2008-04-23 | 2009-11-12 | Hitachi Plant Technologies Ltd | 汚泥掻寄機におけるチェーン歯飛び防止装置 |
| JP2012232260A (ja) * | 2011-05-02 | 2012-11-29 | Hitachi Plant Technologies Ltd | 汚泥掻寄機 |
| JP2013010085A (ja) * | 2011-06-30 | 2013-01-17 | Sumitomo Heavy Industries Environment Co Ltd | 汚泥掻寄機 |
| JP5065513B1 (ja) * | 2011-07-01 | 2012-11-07 | 水ing株式会社 | 汚泥掻寄せ機 |
| JP2013013841A (ja) * | 2011-07-01 | 2013-01-24 | Swing Corp | 汚泥掻寄せ機 |
| JP2015120166A (ja) * | 2015-03-09 | 2015-07-02 | 水ing株式会社 | 汚泥掻き寄せ機 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016147220A (ja) * | 2015-02-10 | 2016-08-18 | Jfeエンジニアリング株式会社 | 汚泥掻寄機 |
| JP2015120166A (ja) * | 2015-03-09 | 2015-07-02 | 水ing株式会社 | 汚泥掻き寄せ機 |
| JP2016209839A (ja) * | 2015-05-12 | 2016-12-15 | 株式会社日立プラントサービス | 汚泥掻寄機のチェーン送り装置 |
| JP6273344B1 (ja) * | 2016-12-28 | 2018-01-31 | クボタ環境サ−ビス株式会社 | 汚泥掻き寄せ装置 |
| JP2018103138A (ja) * | 2016-12-28 | 2018-07-05 | クボタ環境サ−ビス株式会社 | 汚泥掻き寄せ装置 |
| CN114307271A (zh) * | 2021-12-16 | 2022-04-12 | 江苏苏淮环境工程有限公司 | 一种环保用一体化高效非金属链板式刮砂机 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6042717B2 (ja) | 2016-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6042717B2 (ja) | 汚泥掻き寄せ装置 | |
| JP6042716B2 (ja) | 汚泥掻き寄せ装置 | |
| JP6312777B2 (ja) | 汚泥掻き寄せ装置 | |
| JP2009039698A (ja) | 集砂装置 | |
| JP7023705B2 (ja) | 汚泥掻寄機 | |
| JP6349373B2 (ja) | 汚泥掻き寄せ装置 | |
| AU2012203324B2 (en) | Leveling hold-down mechanism for lateral screens | |
| JP6921013B2 (ja) | 汚泥掻寄方法 | |
| JP2018134581A (ja) | 汚泥掻寄装置 | |
| JP6710148B2 (ja) | バースクリーン式除塵機 | |
| KR200436015Y1 (ko) | 스컴스키머장치 | |
| JP7336076B2 (ja) | 汚泥掻寄機 | |
| JP2018108869A (ja) | チェーン及び汚泥掻寄機 | |
| JP6273344B1 (ja) | 汚泥掻き寄せ装置 | |
| US6126019A (en) | Sewage collector flight | |
| JP6697493B2 (ja) | 汚泥掻き寄せ装置 | |
| JP2018130667A (ja) | 汚泥掻寄機 | |
| CN210302545U (zh) | 一种矩形二沉池刮泥机的超长驱动链的张紧装置 | |
| JP6357690B2 (ja) | 汚泥掻寄装置のスクレーパ本体を生産する方法 | |
| KR102225050B1 (ko) | 단축만으로 체인 장력을 유지하는 슬러지 수집기용 체인 장력조절장치 | |
| KR101631433B1 (ko) | 슬러지 수집기용 장력 조절장치 | |
| CN218608186U (zh) | 刮泥机专用支撑板 | |
| JP2021020199A (ja) | 傾斜面式沈降装置 | |
| JP3115869U (ja) | 傾斜管落下防止装置 | |
| KR20090044922A (ko) | 담수설비용 대구경 배관의 설치방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20150918 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161011 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161110 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6042717 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |