JP2014127101A - プラント制御装置 - Google Patents
プラント制御装置 Download PDFInfo
- Publication number
- JP2014127101A JP2014127101A JP2012284635A JP2012284635A JP2014127101A JP 2014127101 A JP2014127101 A JP 2014127101A JP 2012284635 A JP2012284635 A JP 2012284635A JP 2012284635 A JP2012284635 A JP 2012284635A JP 2014127101 A JP2014127101 A JP 2014127101A
- Authority
- JP
- Japan
- Prior art keywords
- prediction
- control output
- plant
- target value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Abstract
【課題】プラントの制御出力に課せられた制約が満足されるようにリファレンスガバナを用いて制御出力の目標値を修正するにあたり、制約の充足性を担保しつつ制御出力の将来予測にかかる演算負荷を低減する。
【解決手段】本発明に係るプラント制御装置はFBC(フィードバックコントローラ)とRG(リファレンスガバナ)とを備える。FBCは制御出力を目標値に近づけるようにFB制御によって制御入力を決定する。RGはプラントとFBCとを含む閉ループシステムを「むだ時間+2次振動系」で近似したモデルを用いて制御出力を予測し、その予測値と制約とに基づいてFBCに与えられる目標値を修正する。RGは予測を開始して最初のステップは予測モデルのむだ時間L或いはむだ時間Lに2次振動系の半周期T/2を加えた時間を予測間隔に設定し、2番目のステップ以降は2次振動系の半周期T/2を予測間隔に設定して予測値を計算する。
【選択図】図2
【解決手段】本発明に係るプラント制御装置はFBC(フィードバックコントローラ)とRG(リファレンスガバナ)とを備える。FBCは制御出力を目標値に近づけるようにFB制御によって制御入力を決定する。RGはプラントとFBCとを含む閉ループシステムを「むだ時間+2次振動系」で近似したモデルを用いて制御出力を予測し、その予測値と制約とに基づいてFBCに与えられる目標値を修正する。RGは予測を開始して最初のステップは予測モデルのむだ時間L或いはむだ時間Lに2次振動系の半周期T/2を加えた時間を予測間隔に設定し、2番目のステップ以降は2次振動系の半周期T/2を予測間隔に設定して予測値を計算する。
【選択図】図2
Description
本発明は、プラントの制御装置に関し、詳しくは、プラントの制御出力に課せられる制約が充足されるようにリファレンスガバナを用いてプラントの制御量の目標値を修正する制御装置に関する。
プラント制御装置では、プラントの制御出力に関して目標値が与えられた場合、制御出力を目標値に追従させるようにフィードバック制御によってプラントの制御入力を決定している。ただし、実際のプラントの制御においては、プラントの制御出力に関してハード上或いは制御上の様々な制約が存在している場合が多い。それら制約が充足されない場合、ハードの破損や制御性能の低下が生じるおそれがある。制御出力に課せられた制約の充足性は、目標値に対する制御出力の追従性と同じく、プラントの制御において求められる重要な性能の1つである。
リファレンスガバナは上記要求を満たすための1つの有効な手段である。リファレンスガバナは、制御対象であるプラントとフィードバックコントローラとを含む閉ループシステム(フィードバック制御システム)をモデル化した予測モデルを備え、制御出力の将来値を予測モデルによって予測する。そして、制御出力の予測値とそれに課せられた制約とに基づいて制御出力の目標値を修正することにより、制御出力に課せられる制約が充足されるようにする。
リファレンスガバナをプラントの制御に適用した先行技術の例としては、下記の特許文献1に開示された先行技術を挙げることができる。この先行技術は多段圧延装置における圧延材の張力制御に関するものである。特許文献1に開示された先行技術では、圧延材の張力の時間変化を規定した目標軌道データがリファレンスガバナによって予め演算され、圧延材の張力実績値と目標軌道データとの偏差に基づいて圧延材の張力が制御される。
上記公報に開示された発明では、リファレンスガバナによるオフライン計算が行われている。多段圧延装置における圧延材の張力の目標値は予め与えられているため、リファレンスガバナによる目標値の修正はオフラインで行うことができる。しかし、プラントの種類によっては、オフライン計算ではなくオンライン計算が必要とされる場合がある。自動車の動力装置として用いられる内燃機関はそのようなプラントの一種である。内燃機関では、運転条件によって刻々と制御出力の目標値が変化することから、制御出力に課せられた制約を満たすためにはオンライン計算による目標値の修正が必要となる。ただし、リファレンスガバナのオンライン計算に掛かる計算量は多大であるため、オンライン計算を行うプラントの制御装置には大きな演算負荷がかかってしまう。
制御装置にかかる演算負荷を抑える有効な方法としては、リファレンスガバナにおいて制御出力の将来値を予測するタイムステップ、すなわち、予測間隔をできる限り長くとることが考えられる。演算負荷は予測間隔に依存し、予測間隔が短いほど演算負荷は大きくなるからである。しかし、予測間隔は演算負荷だけでなく将来値の予測精度にも影響する。予測間隔を無闇に長く取ってしまうと将来値の予測精度が低下し、制約の充足性が担保されなくなってしまう。よって、制約の充足性を担保しつつ制御装置の演算負荷を抑えるためには、リファレンスガバナによる将来予測の予測間隔を如何に最適化するかが重要であると言える。
本発明は、上述のような問題に鑑みてなされたもので、プラントの制御出力に課せられた制約が満足されるようにリファレンスガバナを用いて制御出力の目標値を修正するにあたり、制約の充足性を担保しつつ制御出力の将来予測にかかる演算負荷を低減することを目的とする。
本発明に係るプラント制御装置は、フィードバックコントローラとリファレンスガバナとを備える。フィードバックコントローラは、プラントの制御出力を目標値に近づけるようにフィードバック制御によってプラントの制御入力を決定するように構成される。リファレンスガバナは、プラントとフィードバックコントローラとを含む閉ループシステムをむだ時間と2次振動系とで近似した予測モデルを用いて制御出力の将来の予測値を計算し、予測値と制御出力に課せられた制約とに基づいてフィードバックコントローラに与えられる目標値を修正するように構成される。本発明に係るプラント制御装置では、リファレンスガバナは、予測を開始して最初のステップは予測モデルにおけるむだ時間を予測間隔に設定するか、或いは、むだ時間に予測モデルにおける2次振動系の半周期を加えた時間を予測間隔に設定して予測値を計算する。そして、2番目のステップ以降は予測モデルにおける2次振動系の半周期を予測間隔に設定して予測値を計算する。
プラントとフィードバックコントローラとを含む閉ループシステムにおいて制御出力の目標値に変化が与えられた場合、変化が与えられた時点からむだ時間の経過後、2次振動系の半周期ごとに制御出力が制約に抵触する可能性が高くなる状況が訪れる。本発明に係るプラント制御装置によれば、このような状況における制御出力の値がピンポイントで予測され、そのピンポイントで得られた予測値に基づいて目標値が修正される。これにより、制御出力に課せられた制約の充足性を担保しつつ制御出力の将来予測にかかる演算負荷を低減することが可能となる。
実施の形態1.
以下、本発明の実施の形態1について図を用いて説明する。
以下、本発明の実施の形態1について図を用いて説明する。
本発明の実施の形態1にかかるプラントはディーゼルエンジン、詳しくは、可変容量ターボチャージャー付きディーゼルエンジンである。可変容量ターボチャージャーには可変ノズルが備えられている。ディーゼルエンジンの制御装置は、可変ノズルを操作してその開度を調整することによって過給圧を制御する。詳しくは、制御装置は、エンジン回転数とエンジン負荷を含む種々の運転条件に過給圧を関連付けたマップを備えている。制御装置は、このマップを用いて過給圧の目標値を決定し、過給圧センサにより計測された過給圧の実値が目標値になるように可変ノズルを操作して過給圧を制御する。
図1は本発明の実施の形態1の制御装置が有するディーゼルエンジンの過給圧追従制御構造を示す図である。実施の形態1の制御装置2は、リファレンスガバナ4とフィードバックコントローラ6とを備える。リファレンスガバナ4は、ハード上及び制御上の制約を満たすようにオンライン計算で過給圧の目標値を修正する。フィードバックコントローラ6は、過給圧センサにより得られた過給圧の実値をリファレンスガバナ4で修正された目標値(修正目標値)に近づけるように、フィードバック制御によってディーゼルエンジン8の可変ノズル開度(VN開度)の指令値を決定する。フィードバックコントローラ6の仕様には限定はなく、公知のコントローラを用いることができる。一方、リファレンスガバナ4の仕様には以下に説明するような限定がある。
リファレンスガバナ4は、ディーゼルエンジン8の制御出力である過給圧に課せられた制約を満たすように過給圧の目標値を修正する。排気ガス性能、ドライバビリティ、燃費性能、或いはハードの信頼性といった様々な観点からの制約が過給圧に課せられている。リファレンスガバナ4は、過給圧の将来の予測値を計算し、過給圧に課せられた制約を満足するように目標値を修正する。
リファレンスガバナ4は、オンライン計算によって過給圧の予測軌道データ(予測値)を計算する。なお、過給圧の予測軌道データP_refは以下のように表される。ここで、tは時間、nは予測回数、sは予測間隔(タイムステップ)である。

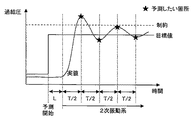
予測軌道データの計算に要する演算負荷を低減するには、予測間隔を長くとることが有効である。ただし、単に予測間隔を長くしただけでは過給圧に課せられた制約が充足されなくなるおそれがある。図2の時間図には、リファレンスガバナ4に与えられた過給圧の目標値(修正前の目標値)の軌道と、過給圧に課せられた制約である上限値と、過給圧の実値の軌道とが予測間隔と併せて示されている。この例では、予測間隔はステップ間で等間隔にとられている。
図2のように過給圧の実値が振動するのであれば、図2に星印で示している箇所において過給圧と制約との抵触が起きる可能性が高い。よって、星印で示している箇所がリファレンスガバナ4により予測したい箇所であるが、この例では予測したい箇所と実際の予測箇所とがずれてしまっている。このため、図2に示す予測間隔の設定の例では、過給圧と制約との抵触が見逃されてしまうおそれがある。この場合、各ステップの予測間隔sを短くしていけば詳細な予測が可能になって過給圧と制約との抵触が見逃される可能性は低くなるが、その分予測軌道データの計算に要する演算負荷は高くなってしまう。
上記のような問題が起きる原因は、ディーゼルエンジン8とフィードバックコントローラ6とを含む閉ループシステムの動特性を考慮することなく予測間隔を設定したことにある。過給圧の目標値の入力信号がステップ入力である場合、フィードバックコントローラ6により制御される過給圧の実値は「むだ時間+2次振動系」の応答を示す。このため、図3に示すように、過給圧の実値の軌道には、ステップ入力からむだ時間Lの経過後、2次振動系の半周期T/2ごとに極値が現れる。図3における過給圧の実値の軌道と制約との関係から分かるように、過給圧が制約に抵触する可能性が高くなるのは、2次振動系の半周期ごとに現れる極値においてである。よって、過給圧に課せられた制約が充足されるようにするためには、過給圧の軌道を細分して予測せずとも、図3に星印で示している箇所、つまり、2次振動系の半周期ごとに現れる極値を予測するだけで十分であると言える。
本実施の形態では、リファレンスガバナ4は、閉ループシステムの動特性を「むだ時間+2次振動(2次遅れ)系」で近似した予測モデルを使用して過給圧の予測軌道データを計算する。予測モデルのモデル式は以下の伝達関数G(S)によって表される。ここで、“L”はむだ時間、“ωn”は自然角周波数、“K”は係数、“ζ”は減衰係数である。
リファレンスガバナ4は、閉ループシステムの動特性を考慮した予測間隔の設定を採用する。詳しくは、目標値のステップ入力に合わせて予測を開始すると、予測を開始して最初のステップではむだ時間Lを予測間隔に設定し、2番目のステップ以降では2次振動系の半周期T/2を予測間隔に設定する。むだ時間Lは予測モデルにおけるむだ時間であり、2次振動系の半周期T/2は予測モデルにおける2次振動系の半周期である。リファレンスガバナ4による予測間隔をこのように設定することで、制約の充足性を担保しつつ過給圧の予測軌道データの計算に要する演算負荷を低減することができる。なお、自然角周波数ωnと減衰係数ζとを用いると、予測モデルにおける2次振動系の半周期T/2は次の式で計算することができる。
上述のように予測間隔の設定が行われることにより、リファレンスガバナ4により計算される過給圧の予測軌道データP_refは詳しくは以下のように表される。
実施の形態2.
次に、本発明の実施の形態2について図を用いて説明する。
次に、本発明の実施の形態2について図を用いて説明する。
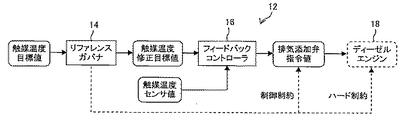
本発明の実施の形態2にかかるプラントはディーゼルエンジン、詳しくは、ディーゼルエンジンの後処理システムである。後処理システムは、排気通路にDPF(ディーゼル微粒子除去装置)を備え、シリンダヘッドの排気ポートに燃料添加弁を備えている。ディーゼルエンジンの制御装置は、燃料添加弁を操作して排気ガス中への燃料添加量を調整することによってディーゼルエンジン8の制御出力であるDPF温度を制御する。
図4は本発明の実施の形態2の制御装置が有するディーゼルエンジンのDPF温度追従制御構造を示す図である。実施の形態2の制御装置12は、リファレンスガバナ14とフィードバックコントローラ16とを備える。フィードバックコントローラ16は、DPF温度センサにより得られたDPF温度の実値をリファレンスガバナ14で修正された目標値(修正目標値)に近づけるように、フィードバック制御によってディーゼルエンジン18に対する燃料添加量に関する指令値を決定する。
リファレンスガバナ14は、ディーゼルエンジン18とフィードバックコントローラ16とを含む閉ループシステムをモデル化した予測モデルを用いてDPF温度の予測軌道データ(予測値)を計算する。この予測モデルでは、閉ループシステムの動特性が「むだ時間+2次振動系」で近似されている。リファレンスガバナ14は、目標値のステップ入力に合わせて予測を開始すると、予測を開始して最初のステップではむだ時間を予測間隔に設定し、2番目のステップ以降では2次振動系の半周期を予測間隔に設定するようにプログラムされている。
実施の形態3.
次に、本発明の実施の形態3について図を用いて説明する。
次に、本発明の実施の形態3について図を用いて説明する。
本発明の実施の形態3にかかるプラントはディーゼルエンジン、詳しくは、EGR装置付きディーゼルエンジンである。ディーゼルエンジンの制御装置は、EGR弁を操作してその開度を調整することによってディーゼルエンジンの制御出力であるEGR率を制御する。
図5は本発明の実施の形態3の制御装置が有するディーゼルエンジンのEGR率追従制御構造を示す図である。実施の形態3の制御装置22は、リファレンスガバナ24とフィードバックコントローラ26とを備える。フィードバックコントローラ26は、EGR率の推定値をリファレンスガバナ24で修正された目標値(修正目標値)に近づけるように、フィードバック制御によってディーゼルエンジン28に対するEGR弁開度に関する指令値を決定する。なお、EGR率の推定値はエンジン回転数と過給圧と新気量とに基づいて計算することができる。
リファレンスガバナ24は、ディーゼルエンジン28とフィードバックコントローラ26とを含む閉ループシステムをモデル化した予測モデルを用いてEGR率の予測軌道データ(予測値)を計算する。この予測モデルでは、閉ループシステムの動特性が「むだ時間+2次振動系」で近似されている。リファレンスガバナ24は、目標値のステップ入力に合わせて予測を開始すると、予測を開始して最初のステップではむだ時間を予測間隔に設定し、2番目のステップ以降では2次振動系の半周期を予測間隔に設定するようにプログラムされている。
実施の形態4.
次に、本発明の実施の形態4について図を用いて説明する。
次に、本発明の実施の形態4について図を用いて説明する。
本発明の実施の形態4にかかるプラントはガソリンエンジンである。ガソリンエンジンの制御装置は、スロットルを操作することによってガソリンエンジンの制御出力である充填効率を制御する。詳しくは、制御装置は、エンジン回転数とエンジン負荷を含む種々の運転条件に充填効率を関連付けたマップを備えている。制御装置は、このマップを用いて充填効率の目標値を決定し、充填効率の推定値が目標値になるようにスロットルを操作して充填効率を制御する。充填効率の推定値は、スロットルの動作に対する筒内空気量の応答を流体力学等に基づいてモデル化したエアモデル(吸気系の物理モデル)を用いて計算される。
図6は本発明の実施の形態4の制御装置が有するガソリンエンジンの充填効率追従制御構造を示す図である。実施の形態4の制御装置32は、リファレンスガバナ34とフィードバックコントローラ36とを備える。フィードバックコントローラ36は、充填効率の推定値をリファレンスガバナ34で修正された目標値(修正目標値)に近づけるように、フィードバック制御によってガソリンエンジン38に対するスロット開度に関する指令値を決定する。
リファレンスガバナ34は、ガソリンエンジン38とフィードバックコントローラ36とを含む閉ループシステムをモデル化した予測モデルを用いて充填効率の予測軌道データ(予測値)を計算する。この予測モデルでは、閉ループシステムの動特性が「むだ時間+2次振動系」で近似されている。リファレンスガバナ34は、目標値のステップ入力に合わせて予測を開始すると、予測を開始して最初のステップではむだ時間を予測間隔に設定し、2番目のステップ以降では2次振動系の半周期を予測間隔に設定するようにプログラムされている。
その他.
本発明は上述の実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。例えば、図7に示すように、むだ時間Lに2次振動系の半周期T/2を加えた時間を最初のステップの予測間隔に設定し、2番目のステップ以降では2次振動系の半周期T/2を予測間隔に設定することもできる。このように予測間隔を設定した場合でも上述の実施の形態と同じ効果を得ることができる。
本発明は上述の実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。例えば、図7に示すように、むだ時間Lに2次振動系の半周期T/2を加えた時間を最初のステップの予測間隔に設定し、2番目のステップ以降では2次振動系の半周期T/2を予測間隔に設定することもできる。このように予測間隔を設定した場合でも上述の実施の形態と同じ効果を得ることができる。
本発明の制御装置が適用可能なプラントは内燃機関には限定されない。移動体に搭載されるプラントでも定置型のプラントでもよいが、少なくとも、制御出力のフィードバック制御にかかる閉ループ系の動特性が「むだ時間+2次振動系」でモデル化されるプラントであればよい。
2,12,22,32 制御装置
4,14,24,34 リファレンスガバナ
6,16,26,36 フィードバックコントローラ
8,18,28 ディーゼルエンジン(プラント)
38 ガソリンエンジン(プラント)
4,14,24,34 リファレンスガバナ
6,16,26,36 フィードバックコントローラ
8,18,28 ディーゼルエンジン(プラント)
38 ガソリンエンジン(プラント)
Claims (1)
- プラントの制御出力を目標値に近づけるようにフィードバック制御によって前記プラントの制御入力を決定するフィードバックコントローラと、
前記プラントと前記フィードバックコントローラとを含む閉ループシステムをむだ時間と2次振動系とで近似したモデルを用いて前記制御出力の将来の予測値を計算し、前記予測値と前記制御出力に課せられた制約とに基づいて前記フィードバックコントローラに与えられる前記目標値を修正するリファレンスガバナとを備え、
前記リファレンスガバナは、予測を開始して最初のステップは前記モデルにおけるむだ時間或いは前記むだ時間に前記モデルにおける2次振動系の半周期を加えた時間を予測間隔に設定して前記予測値を計算し、2番目のステップ以降は前記2次振動系の半周期を予測間隔に設定して前記予測値を計算することを特徴とするプラント制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012284635A JP2014127101A (ja) | 2012-12-27 | 2012-12-27 | プラント制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012284635A JP2014127101A (ja) | 2012-12-27 | 2012-12-27 | プラント制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014127101A true JP2014127101A (ja) | 2014-07-07 |
Family
ID=51406520
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012284635A Withdrawn JP2014127101A (ja) | 2012-12-27 | 2012-12-27 | プラント制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014127101A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016061188A (ja) * | 2014-09-17 | 2016-04-25 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP2020020273A (ja) * | 2018-07-30 | 2020-02-06 | トヨタ自動車株式会社 | 制御装置 |
| WO2020162199A1 (ja) * | 2019-02-05 | 2020-08-13 | オムロン株式会社 | 制御装置、モデル作成方法および制御プログラム |
-
2012
- 2012-12-27 JP JP2012284635A patent/JP2014127101A/ja not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016061188A (ja) * | 2014-09-17 | 2016-04-25 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP2020020273A (ja) * | 2018-07-30 | 2020-02-06 | トヨタ自動車株式会社 | 制御装置 |
| WO2020162199A1 (ja) * | 2019-02-05 | 2020-08-13 | オムロン株式会社 | 制御装置、モデル作成方法および制御プログラム |
| JP2020126481A (ja) * | 2019-02-05 | 2020-08-20 | オムロン株式会社 | 制御装置、モデル作成方法および制御プログラム |
| JP7024742B2 (ja) | 2019-02-05 | 2022-02-24 | オムロン株式会社 | 制御装置、モデル作成方法および制御プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20160160787A1 (en) | Controller for controlling an internal combustion engine of a vehicle, in particular a commercial vehicle | |
| JP5140138B2 (ja) | 制御装置 | |
| JP6077483B2 (ja) | 制御装置 | |
| JP5930074B2 (ja) | プラント制御装置 | |
| JP6032253B2 (ja) | 内燃機関の制御装置 | |
| JP5621744B2 (ja) | 車載動力プラントの制御装置 | |
| JP2014127083A (ja) | 車両動力プラントの制御装置 | |
| JP2015203402A (ja) | 内燃機関のシリンダ吸入空気量推定装置および推定方法 | |
| US9567924B2 (en) | Controller for internal combustion engine with supercharger | |
| JP2014127101A (ja) | プラント制御装置 | |
| JPWO2011125220A1 (ja) | 内燃機関の制御装置 | |
| JP6044590B2 (ja) | 内燃機関の制御装置 | |
| JP6065822B2 (ja) | 内燃機関の制御装置 | |
| JP2014048715A (ja) | プラント制御装置 | |
| JP6459939B2 (ja) | プラント制御装置 | |
| JP6079604B2 (ja) | 内燃機関の制御装置 | |
| JP2018063586A (ja) | プラント制御装置 | |
| JP2015197087A (ja) | 内燃機関の制御装置 | |
| JP2014074987A (ja) | プラント制御装置 | |
| JP2017020357A (ja) | 内燃機関の制御装置 | |
| JP2016098771A (ja) | 内燃機関の制御装置 | |
| JP2014047757A (ja) | 内燃機関の制御装置 | |
| JP5692104B2 (ja) | 過給機付き内燃機関の空気量推定装置 | |
| JP2010038074A (ja) | 内燃機関の制御装置 | |
| JP2015049577A (ja) | プラント制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150116 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20151102 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151111 |