JP2014123778A - リソグラフィ装置およびデバイス製造方法 - Google Patents
リソグラフィ装置およびデバイス製造方法 Download PDFInfo
- Publication number
- JP2014123778A JP2014123778A JP2014066305A JP2014066305A JP2014123778A JP 2014123778 A JP2014123778 A JP 2014123778A JP 2014066305 A JP2014066305 A JP 2014066305A JP 2014066305 A JP2014066305 A JP 2014066305A JP 2014123778 A JP2014123778 A JP 2014123778A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- positioning member
- actuator
- positioning
- substrate table
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70775—Position control, e.g. interferometers or encoders for determining the stage position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70758—Drive means, e.g. actuators, motors for long- or short-stroke modules or fine or coarse driving
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
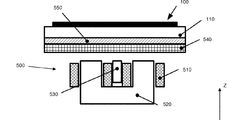
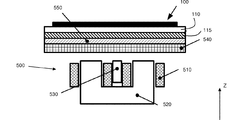
【解決手段】基板ステージがリソグラフィ装置で使用される。基板ステージは、基板を保持する基板テーブルと、使用中リソグラフィ装置の投影システムに対して基板テーブルを位置決めするための位置決めデバイスとを備える。位置決めデバイスは、基板テーブルに設置された第1位置決め部材と、基板テーブルを位置決めするために第1位置決め部材と協働する第2位置決め部材とを備える。第2位置決め部材はサポート構造に設置される。
基板ステージは、サポート構造に対して実質的に固定された水平位置において基板テーブルの底面に垂直力を加えるアクチュエータをさらに備える。
【選択図】図2
Description
基板ステージは、基板を保持するように構築された基板テーブルと、使用中、リソグラフィ装置の投影システムに対して基板テーブルを位置決めするための位置決めデバイスとを備える。位置決めデバイスは、基板テーブルに設置された第1位置決め部材と、基板テーブルを位置決めするために第1位置決め部材と協働する第2位置決め部材とを備える。第2部材はサポート構造に設置される。基板ステージは、サポート構造に対して実質的に固定された水平位置において基板テーブルの底面に垂直力を加えるように配置されたアクチュエータをさらに備える。
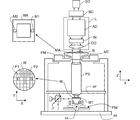
のマスク型、ならびに種々のハイブリッドマスク型を含む。プログラマブルミラーアレイの一例では、小型ミラーのマトリックス配列が用いられており、各小型ミラーは、入射する放射ビームを様々な方向に反射させるように、個別に傾斜させることができる。傾斜されたミラーは、ミラーマトリックスによって反射される放射ビームにパターンを付ける。
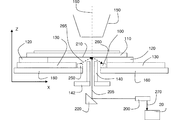
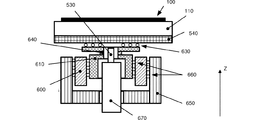
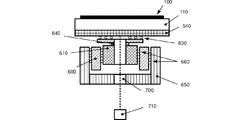
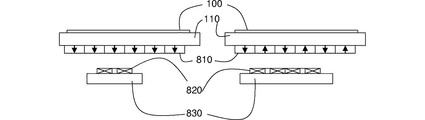
図2の構成に加えて、測定ビーム205を基板テーブル110の反射底面210に向かって(ミラー220を介して)投影するように配置された測定システム(干渉計(IF)測定システム200)が提供される。図示した構成では、アクチュエータ140には中心孔または開口が設けられており、これによって、対象点(すなわち、パターン付き放射ビームが投影される基板のターゲット部分)の下での測定ビーム205の投影を可能にする。
図示した構成では、アクチュエータ140は振動絶縁フレーム142に設置される。あるいは、上記したように、アクチュエータ140は、第1位置決め部材120または第2位置決め部材130のいずれかに(直接または変位可能に)設置されてもよい。基板テーブルの底面の垂直位置を決定するために他のタイプの測定システムも同様に適用してもよいことに留意されたい。そのようなシステムの例としては、容量測定システム、エンコーダベースの測定システムなどが挙げられる。
1.リソグラフィ装置で用いる基板ステージであって、
基板を保持する基板テーブルと、
使用中、前記リソグラフィ装置の投影システムに対して前記基板テーブルを位置決めするための位置決めデバイスとを備え、
前記位置決めデバイスは、
前記基板テーブルに設置された第1位置決め部材と、
前記基板テーブルを位置決めするために前記第1位置決め部材と協働する第2位置決め部材であって、サポート構造に設置される第2位置決め部材とを備え、
前記基板ステージは、前記サポート構造に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えるアクチュエータをさらに備える、基板ステージ。
2.前記アクチュエータは前記サポート構造上に設置される、前記1に記載の基板ステージ。
3.前記アクチュエータは前記第2位置決め部材または第1位置決め部材上に設置される、前記1に記載の基板ステージ。
4.前記アクチュエータは、前記サポート構造に対して実質的に固定された水平位置を維持するように前記第2位置決め部材上に変位可能に設置される、前記1に記載の基板ステージ。
5.前記アクチュエータは、前記サポート構造に対して実質的に固定された位置を有する振動絶縁フレームに設置される、前記1に記載の基板ステージ。
6.前記アクチュエータは、振動絶縁体を介して前記サポート構造または前記第2位置決め部材上に設置される、前記2または3に記載の基板ステージ。
7.前記アクチュエータはローレンツアクチュエータを備える、前記1〜6のうちのいずれかに記載の基板ステージ。
8.前記アクチュエータは、使用中、上方に向いたガス流を提供する、前記1〜6のうちのいずれかに記載の基板ステージ。
9.前記基板テーブルの前記底面の垂直位置を決定するための位置測定システムをさらに備える、前記1〜8のうちのいずれかに記載の基板ステージ。
10.前記垂直位置を表す入力信号を入力端子で受け取り、かつ前記入力信号に基づいて前記アクチュエータを制御する制御ユニットをさらに備える、前記9に記載の基板ステージ。
11.投影システムと前記1〜10のうちのいずれかに記載の基板ステージとを備える、リソグラフィ装置。
12.リソグラフィ装置であって、
放射ビームの断面にパターンを付与してパターン付き放射ビームを形成することができるパターニングデバイスを支持するサポートと、
基板を保持する基板テーブルと、
前記パターン付きビームを前記基板のターゲット部分上に投影する投影システムとを備え、
前記装置は、使用中、前記投影システムに対して前記基板テーブルを位置決めするための位置決めデバイスをさらに備え、
前記位置決めデバイスは、
前記基板テーブルに設置された第1位置決め部材と、
前記基板テーブルを位置決めするために前記第1位置決め部材と協働する第2位置決め部材であって、サポート構造に設置される第2位置決め部材とを備え、
前記基板ステージは、前記投影システムの光軸に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えるアクチュエータをさらに備える、リソグラフィ装置。
13.前記実質的に固定された水平位置は前記投影システムの前記光軸上にある、前記12に記載の装置。
14.前記アクチュエータは、メトロロジフレームなどの振動絶縁フレームに設置される、前記12または13に記載の装置。
15.前記光軸の方向における前記基板テーブルの第1位置を測定するための位置測定システムをさらに備える、前記12〜14のうちのいずれかに記載の装置。
16.前記位置測定システムは、前記光軸と実質的に直角の方向における前記基板テーブルの第2位置を決定するようにさらに構成される、前記15に記載の装置。
17.前記第1位置を表す第1入力信号および前記第2位置を表す第2入力信号を入力端子で受け取り、前記第1入力信号に基づいて前記アクチュエータを制御し、さらに前記第2入力信号に基づいて前記位置決めデバイスを制御する制御ユニットをさらに備える、前記16に記載の装置。
18.前記位置測定システムは、前記基板テーブルの前記底面に設置されたエンコーダ格子と、投影システムを支持するメトロロジフレームに設置された、前記第1位置および前記第2位置を決定するために該エンコーダ格子と協働するエンコーダヘッドとを備える、前記17に記載の装置。
19.前記第1位置決め部材は前記基板テーブルを位置決めするためのさらなる位置決めデバイスを備える、前記12〜18のうちのいずれかに記載の装置。
20.前記アクチュエータは、前記さらなる位置決めデバイスに力を加えることによって前記底面に前記垂直力を加える、前記19に記載の装置。
21.デバイス製造方法であって、
投影システムに対して基板を位置決めすることと、
パターン付き放射ビームを前記基板のターゲット部分上に投影することとを含み、
前記基板を位置決めするステップは、
基板テーブルに設置された第1位置決め部材と、前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える位置決めデバイスを提供することと、
前記投影システムの光軸に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えることとを含む、デバイス製造方法。
22.リソグラフィ装置で用いる基板ステージであって、
基板を保持する基板テーブルと、
前記リソグラフィ装置の投影システムに対して前記基板テーブルを位置決めする位置決めデバイスであって、前記基板テーブルに設置された第1位置決め部材と、前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える、位置決めデバイスと、
前記サポート構造に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えるアクチュエータと、
を備える、基板ステージ。
23.前記アクチュエータは前記サポート構造上に設置される、前記22に記載の基板ステージ。
24.前記アクチュエータは前記第2位置決め部材または前記第1位置決め部材上に設置される、前記22に記載の基板ステージ。
25.前記アクチュエータは、前記サポート構造に対して実質的に固定された水平位置を維持するように前記第2位置決め部材上に変位可能に設置される、前記22に記載の基板ステージ。
26.前記アクチュエータは、前記サポート構造に対して実質的に固定された位置を有する振動絶縁フレームに設置される、前記22に記載の基板ステージ。
27.前記アクチュエータは、振動絶縁体を介して前記サポート構造または前記第2位置決め部材上に設置される、前記23に記載の基板ステージ。
28.前記アクチュエータはローレンツアクチュエータを備える、前記23に記載の基板ステージ。
29.前記アクチュエータは、使用中、上方に向いたガス流を提供する、前記22に記載の基板ステージ。
30.前記基板テーブルの前記底面の垂直位置を決定するための位置測定システムをさらに備える、前記22に記載の基板ステージ。
31.前記垂直位置を表す入力信号を入力端子で受け取り、かつ前記入力信号に基づいて前記アクチュエータを制御する制御ユニットをさらに備える、前記30に記載の基板ステージ。
32.リソグラフィ装置であって、
放射ビームの断面にパターンを付与してパターン付き放射ビームを形成することができるパターニングデバイスを支持するサポートと、
基板を保持する基板テーブルであって、投影システムの光軸に対して実質的に固定された水平位置において該基板テーブルの底面に垂直力を加えるアクチュエータを備える、基板テーブルと、
前記パターン付きビームを前記基板のターゲット部分上に投影する投影システムと、
使用中、前記投影システムに対して前記基板テーブルを位置決めするための位置決めデバイスと備え、
前記位置決めデバイスは、
前記基板テーブルに設置された第1位置決め部材と、
前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える、リソグラフィ装置。
33.前記実質的に固定された水平位置は前記投影システムの光軸上にある、前記32に記載の装置。
34.前記アクチュエータは、メトロロジフレームなどの振動絶縁フレームに設置される、前記32に記載の装置。
35.前記光軸の方向における前記基板テーブルの第1位置を測定する位置測定システムをさらに備える、前記32に記載の装置。
36.前記位置測定システムは、前記光軸と実質的に直角の方向における前記基板テーブルの第2位置を決定するようにさらに構成される、前記35に記載の装置。
37.前記第1位置を表す第1入力信号および前記第2位置を表す第2入力信号を入力端子で受け取り、前記第1入力信号に基づいて前記アクチュエータを制御し、さらに前記第2入力信号に基づいて前記位置決めデバイスを制御する制御ユニットをさらに備える、前記37に記載の装置。
38.前記位置測定システムは、前記基板テーブルの前記底面に設置されたエンコーダ格子と、前記投影システムを支持するメトロロジフレームに設置された、前記第1位置および前記第2位置を決定するために前記エンコーダ格子と協働するエンコーダヘッドとを備える、前記37に記載の装置。
39.前記第1位置決め部材は前記基板テーブルを位置決めするためのさらなる位置決めデバイスを備える、前記32に記載の装置。
40.前記アクチュエータは、前記さらなる位置決めデバイスに力を加えることによって前記底面に前記垂直力を加えるように構成される、前記39に記載の装置。
41.デバイス製造方法であって、
投影システムに対して基板を位置決めすることと、
パターン付き放射ビームを前記基板のターゲット部分上に投影することとを含み、
前記基板を位置決めすることは、
基板テーブルに設置された第1位置決め部材と、前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える位置決めデバイスを提供することと、
前記投影システムの光軸に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えることとを含む、デバイス製造方法。
Claims (15)
- リソグラフィ装置で用いる基板ステージであって、
基板を保持する基板テーブルと、
使用中、前記リソグラフィ装置の投影システムに対して前記基板テーブルを位置決めするための位置決めデバイスとを備え、
前記位置決めデバイスは、
前記基板テーブルに設置された第1位置決め部材と、
前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備え、
前記基板ステージは、前記サポート構造に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えるアクチュエータをさらに備える、
基板ステージ。 - 前記アクチュエータは前記サポート構造上に設置される、請求項1に記載の基板ステージ。
- 前記アクチュエータは前記第2位置決め部材または前記第1位置決め部材上に設置される、請求項1に記載の基板ステージ。
- 前記アクチュエータは、前記サポート構造に対して実質的に固定された水平位置を維持するように前記第2位置決め部材上に変位可能に設置される、請求項1に記載の基板ステージ。
- 前記アクチュエータは、前記サポート構造に対して実質的に固定された位置を有する振動絶縁フレームに設置される、請求項1に記載の基板ステージ。
- 前記アクチュエータは、振動絶縁体を介して前記サポート構造または前記第2位置決め部材上に設置される、請求項2または3に記載の基板ステージ。
- 前記アクチュエータは、使用中、上方に向いたガス流を提供する、請求項1〜6のうちのいずれかに記載の基板ステージ。
- デバイス製造方法であって、
投影システムに対して基板を位置決めすることと、
パターン付き放射ビームを前記基板のターゲット部分上に投影することとを含み、
前記基板を位置決めするステップは、
基板テーブルに設置された第1位置決め部材と、前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える位置決めデバイスを提供することと、
前記投影システムの光軸に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えることとを含む、デバイス製造方法。 - リソグラフィ装置で用いる基板ステージであって、
基板を保持する基板テーブルと、
前記リソグラフィ装置の投影システムに対して前記基板テーブルを位置決めする位置決めデバイスであって、前記基板テーブルに設置された第1位置決め部材と、前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える、位置決めデバイスと、
前記サポート構造に対して実質的に固定された水平位置において前記基板テーブルの底面に垂直力を加えるアクチュエータと、
を備える、基板ステージ。 - 前記アクチュエータは前記サポート構造上に設置される、請求項9に記載の基板ステージ。
- 前記アクチュエータは前記第2位置決め部材または前記第1位置決め部材上に設置される、請求項9に記載の基板ステージ。
- 前記アクチュエータは、前記サポート構造に対して実質的に固定された水平位置を維持するように前記第2位置決め部材上に変位可能に設置される、請求項9に記載の基板ステージ。
- 前記アクチュエータは、前記サポート構造に対して実質的に固定された位置を有する振動絶縁フレームに設置される、請求項9に記載の基板ステージ。
- リソグラフィ装置であって、
放射ビームの断面にパターンを付与してパターン付き放射ビームを形成することができるパターニングデバイスを支持するサポートと、
基板を保持する基板テーブルであって、投影システムの光軸に対して実質的に固定された水平位置において該基板テーブルの底面に垂直力を加えるアクチュエータを備える基板テーブルと、
前記パターン付き放射ビームを前記基板のターゲット部分上に投影する投影システムと、
使用中、前記投影システムに対して前記基板テーブルを位置決めするための位置決めデバイスとを備え、
前記位置決めデバイスは、
前記基板テーブルに設置された第1位置決め部材と、
前記基板テーブルを位置決めするために前記第1位置決め部材と協働する、サポート構造に設置された第2位置決め部材とを備える、リソグラフィ装置。 - 前記実質的に固定された水平位置は前記投影システムの光軸上にある、請求項14に記載の装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261650708P | 2012-05-23 | 2012-05-23 | |
| US61/650,708 | 2012-05-23 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013093305A Division JP5513658B2 (ja) | 2012-05-23 | 2013-04-26 | リソグラフィ装置およびデバイス製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014123778A true JP2014123778A (ja) | 2014-07-03 |
| JP2014123778A5 JP2014123778A5 (ja) | 2016-06-02 |
| JP6228878B2 JP6228878B2 (ja) | 2017-11-08 |
Family
ID=49621357
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013093305A Active JP5513658B2 (ja) | 2012-05-23 | 2013-04-26 | リソグラフィ装置およびデバイス製造方法 |
| JP2014066305A Active JP6228878B2 (ja) | 2012-05-23 | 2014-03-27 | リソグラフィ装置およびデバイス製造方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013093305A Active JP5513658B2 (ja) | 2012-05-23 | 2013-04-26 | リソグラフィ装置およびデバイス製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US9261798B2 (ja) |
| JP (2) | JP5513658B2 (ja) |
| NL (1) | NL2010679A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017144236A1 (en) * | 2016-02-25 | 2017-08-31 | Asml Netherlands B.V. | Actuator system and lithographic apparatus |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL2010679A (en) | 2012-05-23 | 2013-11-26 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method. |
| CN105470186B (zh) * | 2015-12-11 | 2019-02-15 | 中国电子科技集团公司第四十八研究所 | 用于反应室内旋转石墨盘精确定位系统 |
| WO2020038661A1 (en) * | 2018-08-23 | 2020-02-27 | Asml Netherlands B.V. | Substrate support, lithographic apparatus, substrate inspection apparatus, device manufacturing method |
| WO2026018233A1 (en) * | 2024-07-14 | 2026-01-22 | Carl Zeiss Sms Ltd. | Extreme ultraviolet mask inspection – laser interferometer optical alignment |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0917848A (ja) * | 1995-06-30 | 1997-01-17 | Nikon Corp | 磁気浮上型ステージ |
| JPH1169764A (ja) * | 1997-08-21 | 1999-03-09 | Nikon Corp | 位置決め装置及び該装置を備えた露光装置 |
| WO2005124832A1 (ja) * | 2004-06-17 | 2005-12-29 | Nikon Corporation | 露光装置 |
| JP2006287033A (ja) * | 2005-04-01 | 2006-10-19 | Yaskawa Electric Corp | ステージ装置およびその露光装置 |
| WO2008108148A1 (ja) * | 2007-03-06 | 2008-09-12 | Kabushiki Kaisha Yaskawa Denki | 精密位置決め装置 |
| JP2009038258A (ja) * | 2007-08-02 | 2009-02-19 | Canon Inc | 露光装置及びデバイス製造方法 |
| WO2009050675A2 (en) * | 2007-10-19 | 2009-04-23 | Koninklijke Philips Electronics N.V. | Displacement device with precision position measurement |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62266490A (ja) * | 1986-05-14 | 1987-11-19 | 株式会社東芝 | 精密位置決め装置 |
| JPH10209030A (ja) * | 1997-01-20 | 1998-08-07 | Nikon Corp | 投影露光方法及び投影露光装置 |
| JP2001313241A (ja) | 2000-04-28 | 2001-11-09 | Canon Inc | 露光装置および露光方法 |
| TWI307526B (en) * | 2002-08-06 | 2009-03-11 | Nikon Corp | Supporting device and the mamufacturing method thereof, stage device and exposure device |
| JP2004087593A (ja) * | 2002-08-23 | 2004-03-18 | Nikon Corp | ステージ装置および露光装置 |
| JP4307872B2 (ja) * | 2003-03-18 | 2009-08-05 | オリンパス株式会社 | 基板検査装置 |
| TWI295414B (en) * | 2003-05-13 | 2008-04-01 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method |
| JP4266713B2 (ja) * | 2003-06-03 | 2009-05-20 | キヤノン株式会社 | 位置決め装置及び露光装置 |
| EP1664587B1 (en) | 2003-09-05 | 2010-11-24 | Koninklijke Philips Electronics N.V. | Actuator arrangement for active vibration isolation comprising an inertial reference mass |
| US7486381B2 (en) * | 2004-05-21 | 2009-02-03 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US7440081B2 (en) | 2004-11-05 | 2008-10-21 | Asml Netherlands B.V. | Lithographic apparatus, device manufacturing method, and substrate table |
| US7442476B2 (en) * | 2004-12-27 | 2008-10-28 | Asml Netherlands B.V. | Method and system for 3D alignment in wafer scale integration |
| US20070236854A1 (en) * | 2006-04-11 | 2007-10-11 | Lee Martin E | Anti-Gravity Device for Supporting Weight and Reducing Transmissibility |
| JP2007331041A (ja) * | 2006-06-13 | 2007-12-27 | Hitachi High-Technologies Corp | 平板状ワークの作業装置 |
| US20080067968A1 (en) * | 2006-09-12 | 2008-03-20 | Nikon Corporation | Identifying and compensating force-ripple and side-forces produced by linear actuators |
| EP2068112A4 (en) * | 2006-09-29 | 2017-11-15 | Nikon Corporation | Mobile unit system, pattern forming device, exposing device, exposing method, and device manufacturing method |
| JP2008147411A (ja) * | 2006-12-08 | 2008-06-26 | Canon Inc | 露光装置及びデバイス製造方法 |
| JP5241276B2 (ja) * | 2008-03-10 | 2013-07-17 | キヤノン株式会社 | 露光装置 |
| US8659746B2 (en) * | 2009-03-04 | 2014-02-25 | Nikon Corporation | Movable body apparatus, exposure apparatus and device manufacturing method |
| JP2010245300A (ja) * | 2009-04-06 | 2010-10-28 | Canon Inc | 駆動装置、露光装置およびデバイス製造方法 |
| TW201100975A (en) * | 2009-04-21 | 2011-01-01 | Nikon Corp | Moving-object apparatus, exposure apparatus, exposure method, and device manufacturing method |
| US20110042874A1 (en) | 2009-08-20 | 2011-02-24 | Nikon Corporation | Object processing apparatus, exposure apparatus and exposure method, and device manufacturing method |
| NL2010679A (en) | 2012-05-23 | 2013-11-26 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method. |
-
2013
- 2013-04-22 NL NL2010679A patent/NL2010679A/en not_active Application Discontinuation
- 2013-04-26 JP JP2013093305A patent/JP5513658B2/ja active Active
- 2013-04-26 US US13/871,328 patent/US9261798B2/en active Active
-
2014
- 2014-03-27 JP JP2014066305A patent/JP6228878B2/ja active Active
-
2016
- 2016-01-21 US US15/003,768 patent/US9811005B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0917848A (ja) * | 1995-06-30 | 1997-01-17 | Nikon Corp | 磁気浮上型ステージ |
| JPH1169764A (ja) * | 1997-08-21 | 1999-03-09 | Nikon Corp | 位置決め装置及び該装置を備えた露光装置 |
| WO2005124832A1 (ja) * | 2004-06-17 | 2005-12-29 | Nikon Corporation | 露光装置 |
| JP2006287033A (ja) * | 2005-04-01 | 2006-10-19 | Yaskawa Electric Corp | ステージ装置およびその露光装置 |
| WO2008108148A1 (ja) * | 2007-03-06 | 2008-09-12 | Kabushiki Kaisha Yaskawa Denki | 精密位置決め装置 |
| JP2009038258A (ja) * | 2007-08-02 | 2009-02-19 | Canon Inc | 露光装置及びデバイス製造方法 |
| WO2009050675A2 (en) * | 2007-10-19 | 2009-04-23 | Koninklijke Philips Electronics N.V. | Displacement device with precision position measurement |
| JP2011503529A (ja) * | 2007-10-19 | 2011-01-27 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 精確な測定を有する移動装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017144236A1 (en) * | 2016-02-25 | 2017-08-31 | Asml Netherlands B.V. | Actuator system and lithographic apparatus |
| JP2019510256A (ja) * | 2016-02-25 | 2019-04-11 | エーエスエムエル ネザーランズ ビー.ブイ. | アクチュエータシステムおよびリソグラフィ装置 |
| US10338483B2 (en) | 2016-02-25 | 2019-07-02 | Asml Netherlands B.V. | Actuator system and lithographic apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013247358A (ja) | 2013-12-09 |
| US20130314684A1 (en) | 2013-11-28 |
| US9261798B2 (en) | 2016-02-16 |
| JP5513658B2 (ja) | 2014-06-04 |
| NL2010679A (en) | 2013-11-26 |
| US20160154322A1 (en) | 2016-06-02 |
| JP6228878B2 (ja) | 2017-11-08 |
| US9811005B2 (en) | 2017-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101325619B1 (ko) | 가변 릴럭턴스 디바이스, 스테이지 장치, 리소그래피 장치 및 디바이스 제조방법 | |
| JP4669868B2 (ja) | ステージ装置およびリソグラフィ装置 | |
| JP5124605B2 (ja) | リソグラフィ装置および位置決め組立体 | |
| TWI623820B (zh) | 定位裝置、微影設備及裝置製造方法 | |
| JP5505871B2 (ja) | 移動体装置及び露光装置 | |
| JP5162417B2 (ja) | リソグラフィ装置およびその振動制御方法 | |
| JP6741739B2 (ja) | 粒子ビーム装置 | |
| KR20120096434A (ko) | 전자기 액추에이터, 스테이지 장치 및 리소그래피 장치 | |
| JP2019523437A (ja) | リソグラフィ装置及びリソグラフィ投影装置 | |
| JP2010093254A (ja) | リソグラフィ装置及びローレンツアクチュエータ | |
| JP6228878B2 (ja) | リソグラフィ装置およびデバイス製造方法 | |
| US9389518B2 (en) | Stage system and a lithographic apparatus | |
| JP2020517980A (ja) | 支持構造、方法、及びリソグラフィ装置 | |
| JP5919395B2 (ja) | 可動ステージシステム及びリソグラフィ装置 | |
| JP4668248B2 (ja) | リソグラフィ装置及びデバイス製造方法 | |
| JP6209234B2 (ja) | リソグラフィ装置及びデバイス製造方法 | |
| JP2019502153A (ja) | アクティブベースフレームサポートを有するリソグラフィ装置 | |
| US10962890B2 (en) | Positioning device, lithographic apparatus, method for compensating a balance mass torque and device manufacturing method | |
| JP2019502956A (ja) | リソグラフィ装置及びデバイス製造方法 | |
| NL2007501A (en) | Variable reluctance device, stage apparatus, lithographic apparatus and device manufacturing method. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160408 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160408 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170928 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6228878 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |