JP2014012119A - 非接触眼圧計 - Google Patents
非接触眼圧計 Download PDFInfo
- Publication number
- JP2014012119A JP2014012119A JP2013073218A JP2013073218A JP2014012119A JP 2014012119 A JP2014012119 A JP 2014012119A JP 2013073218 A JP2013073218 A JP 2013073218A JP 2013073218 A JP2013073218 A JP 2013073218A JP 2014012119 A JP2014012119 A JP 2014012119A
- Authority
- JP
- Japan
- Prior art keywords
- piston
- eye
- intraocular pressure
- air
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/16—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for measuring intraocular pressure, e.g. tonometers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/16—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for measuring intraocular pressure, e.g. tonometers
- A61B3/165—Non-contacting tonometers
Abstract
【解決手段】 ピストンによりシリンダ内の空気を圧縮し、圧縮した空気をノズルから被検眼の角膜に向けて吹き付け角膜を変形する角膜変形手段と、該ピストンの動作を制御するピストン制御手段と、角膜の変形の状態を検知し眼圧を測定する眼圧測定手段を有する装置において、シリンダ内にて該ピストンが圧縮する空気の初期容積を変更可能なピストン容積変更手段、を備える。
【選択図】 図6
Description
その多くは、空気噴射ノズル部に接続されたシリンダ内部をピストンが移動することで、シリンダ内の空気が圧縮され、ノズルから空気が噴射される機構が用いられている。さらに、ピストンの駆動機構については、初期トルクが高く構成が簡単であるとの理由から一般的にソレノイドが使用されている。
通常、ソレノイドの作動力は戻りバネのそれに対して十分に大きく、一度ソレノイドに通電してピストンを駆動させると、電流をとめた後もピストンの自重による慣性力が働き、目的の位置でピストンを止めることが困難であった。
さらには、何らかの制御機構によりピストンを急停止させることが可能だったとしても、シリンダ内の圧縮された空気は、大気圧よりも高いため噴出用ノズルからは空気が漏れ出てしまう。したがって、被検者に対し不快な空気を噴射してしまうという根本的問題の解決にはつながっていなかった。
また従来の装置に対し、ピストン位置検出機構の追加のみで構成可能なため、安価で小型な装置を提供することが可能である。
ベース100に対してフレーム102は左右方向(以下、X軸方向)に移動可能である。X軸方向の駆動機構は、ベース100上に固定されたX軸駆動モータ103と、モータ出力軸に連結された送りねじ(不図示)と、送りねじ上をX軸方向に移動可能でフレーム102に固定されたナット(不図示)で構成されている。モータ103の回転により、送りねじ、ナットを介してフレーム102がX軸方向に移動する。
ベース100には、被検眼Eに対して測定部110を位置合わせするための操作部材であるジョイスティック101が設けられている。
尚、簡単のため外眼照明光源30a、30bは図面上下に記述しているが実際には図と垂直方向に光軸に対して対向して配置されている。
リレーレンズ31は角膜Ecが所定変形時にアパーチャ33とほぼ同等の大きさの角膜反射像を結像するように設計されている。
また、図示のないベース100上の操作パネル305には、印字釦や顎受上下釦などが配置されており、釦入力時にシステム制御部に信号が通知される。
ここで本実施例では、ソレノイド42にロータリーソレノイドを使用している。ロータリーソレノイドは、電圧を印加すると銅線を巻いたコイルの中で可動式のピンが動き、ベアリング等のメカ機構により直線運動を回転運動へ変換する仕組みになっている。また、その回転トルクは一意の方向に限られているため、内蔵のコイルスプリングにより初期位置に戻る構造となっている。
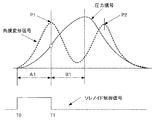
初めに、従来の眼圧測定時におけるシステム制御部301のソレノイド制御について図4および図5を用いて説明を行う。図4は、図2の光学構成図から空気噴射ユニットのみ切り出した図であり、(A)〜(C)の各図はソレノイド42の通電状態とその時のピストン40位置について描かれている。ただし、説明を容易にするため、従来例に必要のないセンサードグ46とピストン位置検出スイッチ47は割愛している。図5はソレノイド制御信号と、その時の眼圧測定時に圧力センサ45より得られた空気室23内の圧力信号、および受光素子34で検出された被検眼Eの変形状態(以後、角膜変形信号とよぶ)の関係を表している。図5の横軸は測定開始時からの時間を表し、縦軸は各信号のレベルを表している。
しかし、ピストン40は自重による慣性力を持っており、ソレノイド42の駆動電流を停止した後も、動き続けることが分かっている。
ピストン40が図4(C)の状態に停止した後は、ソレノイド42に内蔵のコイルスプリングのトルクにより、図4(A)で図示された初期位置であるシリンダ始端に戻される。
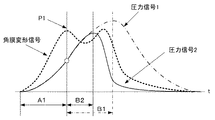
図6は、図2の光学構成図から空気噴射ユニットのみ切り出した図であり、(A)〜(C)の各図はソレノイド42の通電状態とその時のピストン40位置について描かれている。また、図7は眼圧測定時に圧力センサ45より得られた空気室23内の圧力信号と、受光素子34で検出された角膜変形信号の関係を表しており、横軸は測定開始時からの経過時間、縦軸は各信号のレベルを表している。図5と同様に点線は角膜変形信号、実線は圧力信号(圧力信号2)を表している。また、比較のため従来の制御方法時における圧力信号(圧力信号1)を一点鎖線で表している。前述の通り、本実施例1では、ソレノイドの通電期間と上記期間A1は一致しているためソレノイド制御についての説明図は割愛する。
角膜変形信号ピークP1が得られると、システム制御部301はソレノイド42の駆動電流を停止し、同時に取り込んだ図5の○印で示される圧力信号値から被検眼Eの眼圧値を算出する。
しかし、ピストン40の動作開始位置が従来制御よりも前方に変更されているため、図6(B)から図6(C)までの距離は、従来制御時に比べ短くなっている。そのため、図6(B)に図示された斜線部の残留空気量も従来制御に対して十分少ない事が分かる。また、図6(B)から図6(C)に対応した図7で示されたB2期間、すなわちピストン40が慣性力により移動している時間も、従来制御による移動時間B1に対しより短くなっている。
まず測定開始前の準備について簡単に説明する。検者は、被検者に顎受け112に顎を乗せさせ、被検眼のY軸方向を所定の高さになるように顎受けモータ113により調整する。LCDモニタ116に映されている被検眼Eの角膜反射像が表示される位置まで、ジョイスティック101を操作し、測定開始釦を押下する。
また、ステップS102で被検眼の眼圧値が30mmHg以上と判断されている場合、後述する60mmHgモードでのピストンの動作開始位置から測定を行う。
ピストン40が穴を通り過ぎるまではシリンダ43内の空気圧縮が行われないため、ピストン40は空気抵抗が無いままその駆動速度を上げ、穴を過ぎた後空気の圧縮を開始する。ピストン40を同じ力で駆動させた場合、空気圧縮開始時の初期速度が早ければ、その分被検眼に噴出される空気速度も速くなり測定に必要な圧力に到達する時間が短くなる。
そこで実施例1に対して、空気圧縮開始時のピストン40の初期速度を早くすること目的として、以下の実施例2を提案する。
ピストン40は主に、空気圧縮部40a、駆動部40bおよび付勢手段であるバネ40cの3つの部品で構成されている。ここで、本実施例で提案するピストンが従来のピストン40と大きく異なるポイントは、空気圧縮部40a中心部には穴が空いていることである。この穴は、ピストン40において、シリンダ43内の空気を圧縮する側から該ピストン40の後ろ側であるシリンダ43の外部に至る気体通路となる。さらに駆動部40bとの部品間距離が短くなるとその穴が塞がれる構造であることも重要なポイントとなる。
本実施例では、図9(b)のように、駆動部40b凸部のテーパー構造およびゴムリング40dにより、この穴を容易に閉塞出来る構造としている。このテーパー構造およびゴムリングは、前述した気体通路の開閉を行う駆動弁として機能する。
バネ40cの付勢力により駆動部40cと空気圧縮部40aが一定距離Lに保たれている状態では、図9(b)中の点線矢印で図示したように、空気圧縮部40aの中心に開いた穴からピストン後方へ気体通路が確保されている。自然状態では、ピストンの空気圧縮部40aと駆動部40bは、バネ40cの付勢力により離れており気体通路も確保されている。
バネ40cにさらに力かけ空気圧縮部40aと駆動部40bの2部品の距離が近づくと、L1=0において駆動部40bに設けられた凸部が空気圧縮部40aの穴を塞ぎ、気体通路が閉塞状態になる。また、閉塞状態時におけるバネ40cの弾性力は、k×Lとなる。
ここで、空気圧縮部40aに空いた穴の径は、ピストン径に比べ十分小さく後述する機能を満足するように設計されている。
ここからは、実施例1と同様の制御をした時、特徴的であるピストン形状により圧力信号と角膜変形信号がどのように変化するか、図10〜図12を用いて説明を行う。
この状態から、ソレノイドに通電を開始すると駆動部40bにソレノイドの力Fがかかりピストンが加速していく。ここで図11はバネ力とソレノイドの加速度による空気圧縮部40aにかかる力関係を示している。横軸が時間t、縦軸は力fを表している。空気圧縮部40aの質量をmとし、加速度αの力で駆動部40cが押されると、ピストン内の摩擦や慣性の法則により空気圧縮部40aはバネ40cを押し縮める方向にm×αの力が働く。バネ力k×(L−L1)に対し、ソレノイドによる力m×αは十分に大きいため、駆動部40bと空気圧縮部40aの両部品間の距離L1が徐々に縮まる。2部品間の距離が縮まり、「m×α=k×L」すなわちL1=0となった瞬間に図10(b)で図示されたように気体通路は閉塞される。その瞬間の時間をT2として、さらに説明を続ける。
さらに説明を容易にするため、ソレノイド制御信号による駆動時間とON/OFFのタイミングは同じとしている。
従ってピストン40は空気抵抗のないまま加速され続け、T2を過ぎた直後から空気の圧縮を開始する。
そのため、本実施例2では実施例1にくらべ圧縮開始時の初速が早く、圧力信号の傾きが大きいため、圧力信号の検出開始からP1点までの期間が従来のA1(T1−T0)に対し、期間A2(T1−T2)となり、より短時間で所望の圧力を得ることが可能となる。
通常のピストン形状の場合、この状態からピストン駆動の初期位置に戻る際にシリンダ43内の気圧がさがりノズル22から被検眼の涙や空気中のごみ等を吸いこんでしまう問題があった。一方、本実施例2で提案したピストン形状の場合、ソレノイド42の戻りバネの力F‘とバネ40cの弾性力k×Lの方向が一致しているため、図10(d)で図示した様にピストン40の気体通路を開放する方向に力が働く。気体通路が開放されれば、ピストンが初期位置に戻る際にもシリンダ43内の気圧は下がらないため、涙やごみ等の吸い込み発生しない。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
40 ピストン
42 ソレノイド
43 シリンダ
45 圧力センサ
47 検出スイッチ
301 システム制御部
310 ソレノイド駆動回路
Claims (11)
- シリンダ内に配置されて動作開始位置より動作するピストンによりシリンダ内の空気を圧縮し、圧縮した前記空気を前記シリンダ内から被検眼の角膜に向けて吹き付け前記角膜を変形する角膜変形手段と、前記ピストンの動作を制御するピストン制御手段と、前記角膜の変形の状態を検知して前記被検眼の眼圧を測定する眼圧測定手段と、を有する非接触眼圧計において、前記ピストンが前記シリンダ内にて前記空気を圧縮する際の初期容積を変更可能なピストン容積変更手段を有することを特徴とする非接触眼圧計。
- 前記ピストン容積変更手段は、前記ピストンの前記動作開始位置を変更することを特徴とする請求項1に記載の非接触眼圧計。
- 前記ピストンの位置を検出するピストン位置検出手段を有し、前記ピストン制御手段は前記ピストン位置検出手段の検出結果に基づく前記ピストンの前記動作開始位置への移動および前記動作開始位置での保持を行うことを特徴とする請求項1又は2に記載の非接触眼圧計。
- ピストンはソレノイドにより動作され、前記ピストン制御手段は該ソレノイドの駆動電流の可変制御とON/OFF制御によりピストンを制御することを特徴とする請求項3に記載の非接触眼圧計。
- 前記ピストン容積変更手段は、前記眼圧測定手段により測定された前記被検眼の眼圧に応じて前記初期容積を変更することを特徴とする請求項1乃至4の何れか一項に記載の非接触眼圧計。
- 前記ピストン容積変更手段は、前記眼圧測定手段により測定された前記被検眼の眼圧が所定の値以上の場合に前記初期容積を大きくすることを特徴とする請求項5記載の非接触眼圧計。
- 前記ピストン容積変更手段は、前記眼圧測定手段により測定された前記被検眼の眼圧に所定の値を加算した眼圧に応じて前記初期容積を変更することを特徴とする請求項5記載の非接触眼圧計。
- 前記眼圧測定手段による測定毎に前記眼圧測定手段により測定された前記被検眼の眼圧が所定の値以上か否かを判断する判断手段を有することを特徴とする請求項6記載の非接触眼圧計。
- 前記ピストン容積変更手段は、前記眼圧測定手段により測定された前記被検眼の眼圧が所定の値以下の場合に前記初期容積を小さくすることを特徴とする請求項5記載の非接触眼圧計。
- 前記ピストンは、前記シリンダ内の気体を圧縮する側から前記シリンダの外部に至る気体通路と、前記気体通路の開閉を行う駆動弁と、前記ピストンの移動速度が所定速度以上となることに応じて前記駆動弁を動作させて前記気体通路を閉鎖する駆動弁動作手段と、を有することを特徴とする請求項1に記載の非接触眼圧計。
- 前記駆動弁動作手段は、前記気体通路が開放される方向に前記駆動弁に付勢力を付与する付勢手段を有し、
前記付勢手段は、前記ピストンに前記空気の圧縮を行なわせるために前記ピストンに加わる力が前記付勢力以上になると前記気体通路を閉塞状態として前記ピストンによるシリンダ内の前記空気の圧縮が開始されることを特徴とする請求項10に記載の非接触眼圧計。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013073218A JP2014012119A (ja) | 2012-06-08 | 2013-03-29 | 非接触眼圧計 |
| US13/908,150 US20130331679A1 (en) | 2012-06-08 | 2013-06-03 | Contactless tonometer |
| KR1020130064554A KR101601638B1 (ko) | 2012-06-08 | 2013-06-05 | 비접촉 안압계 |
| CN201310228878.6A CN103479329B (zh) | 2012-06-08 | 2013-06-08 | 非接触式眼压计 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012130586 | 2012-06-08 | ||
| JP2012130586 | 2012-06-08 | ||
| JP2013073218A JP2014012119A (ja) | 2012-06-08 | 2013-03-29 | 非接触眼圧計 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014012119A true JP2014012119A (ja) | 2014-01-23 |
| JP2014012119A5 JP2014012119A5 (ja) | 2016-05-19 |
Family
ID=49715844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013073218A Pending JP2014012119A (ja) | 2012-06-08 | 2013-03-29 | 非接触眼圧計 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20130331679A1 (ja) |
| JP (1) | JP2014012119A (ja) |
| KR (1) | KR101601638B1 (ja) |
| CN (1) | CN103479329B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018161217A (ja) * | 2017-03-24 | 2018-10-18 | 株式会社トプコン | 眼科装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014217424A (ja) * | 2013-05-01 | 2014-11-20 | キヤノン株式会社 | 非接触式眼圧計 |
| CN106108841A (zh) * | 2016-06-29 | 2016-11-16 | 无锡市康明医疗器械有限公司 | 一种非接触光摄眼压计及眼压测量方法 |
| KR102075143B1 (ko) | 2018-06-08 | 2020-03-02 | 울산과학기술원 | 안압 모니터링용 스마트 콘택트 렌즈 및 이의 제조방법 |
| US11585339B2 (en) * | 2019-03-18 | 2023-02-21 | Twenty Twenty Therapeutics Llc | Jet pump for noncontact tonometry and associated devices, systems, and methods |
| CN111265186B (zh) * | 2020-03-23 | 2021-12-03 | 华中科技大学 | 一种用于眼压监测的定量加压与检测装置 |
| CN113907702B (zh) * | 2021-10-18 | 2022-07-26 | 湖南卡睿知医疗科技有限公司 | 一种用于非接触眼压计的气缸装置和气路系统 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030088168A1 (en) * | 2001-11-06 | 2003-05-08 | Leica Microsystems Inc. | Metered pump for a non-contact tonometer |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3586572T2 (de) * | 1984-06-12 | 1993-01-07 | Topcon Corp | Beruehrungsloses tonometer. |
| GB2223107B (en) * | 1988-09-22 | 1992-08-19 | Canon Kk | Non-contact tonometer |
| US6234966B1 (en) * | 1991-08-31 | 2001-05-22 | Nidek Co., Ltd. | Noncontact type tonometer |
| JPH0716212A (ja) * | 1993-06-29 | 1995-01-20 | Topcon Corp | 非接触式眼圧計 |
| JPH09192105A (ja) * | 1996-01-17 | 1997-07-29 | Canon Inc | 眼圧計 |
| JPH09201336A (ja) * | 1996-01-30 | 1997-08-05 | Kowa Co | 非接触眼圧計 |
| JP4138408B2 (ja) * | 2002-08-30 | 2008-08-27 | 株式会社ニデック | 非接触式眼圧計 |
| JP2005087549A (ja) * | 2003-09-18 | 2005-04-07 | Canon Inc | 非接触眼圧計 |
-
2013
- 2013-03-29 JP JP2013073218A patent/JP2014012119A/ja active Pending
- 2013-06-03 US US13/908,150 patent/US20130331679A1/en not_active Abandoned
- 2013-06-05 KR KR1020130064554A patent/KR101601638B1/ko active IP Right Grant
- 2013-06-08 CN CN201310228878.6A patent/CN103479329B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030088168A1 (en) * | 2001-11-06 | 2003-05-08 | Leica Microsystems Inc. | Metered pump for a non-contact tonometer |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018161217A (ja) * | 2017-03-24 | 2018-10-18 | 株式会社トプコン | 眼科装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101601638B1 (ko) | 2016-03-09 |
| US20130331679A1 (en) | 2013-12-12 |
| CN103479329B (zh) | 2016-01-13 |
| KR20130138125A (ko) | 2013-12-18 |
| CN103479329A (zh) | 2014-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014012119A (ja) | 非接触眼圧計 | |
| JP5028057B2 (ja) | 眼科装置 | |
| US7841717B2 (en) | Ophthalmologic apparatus | |
| JP2009201636A (ja) | 非接触式眼圧計 | |
| JP6128736B2 (ja) | 眼科装置およびプログラム | |
| EP1982643B1 (en) | Ophthalmic apparatus for measuring a plurality of eye characteristics | |
| US7588336B2 (en) | Ophthalmic apparatus | |
| JP2014209982A (ja) | 非接触眼圧計 | |
| US9326681B2 (en) | Non-contact tonometer, control method of the same, and program | |
| JP4656716B2 (ja) | 非接触式眼圧計 | |
| JP4907214B2 (ja) | 眼科装置 | |
| US9560966B2 (en) | Non-contact type tonometer | |
| JPH11192209A (ja) | 非接触式眼圧計 | |
| US20140330104A1 (en) | Non-contact tonometer | |
| JP2018038517A (ja) | 眼科装置、及び眼科装置の制御方法 | |
| JPH08280630A (ja) | 閉眼式眼圧測定方法および装置 | |
| JP2009082514A (ja) | 非接触式眼圧計 | |
| JP2022048962A (ja) | 非接触式眼圧計及びその制御方法 | |
| EP4046567A1 (en) | System for non-contact measuring intraocular pressure of an eye | |
| JP7256038B2 (ja) | 眼科装置および撮影装置 | |
| JP2005087549A (ja) | 非接触眼圧計 | |
| JP2023050472A (ja) | 眼科装置 | |
| JP2015177880A (ja) | 眼科装置及び制御方法 | |
| JP2006130051A (ja) | 非接触式眼圧計 | |
| JPH01300929A (ja) | 眼圧計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160328 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170317 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170810 |