JP2013176331A - 苗移植機 - Google Patents
苗移植機 Download PDFInfo
- Publication number
- JP2013176331A JP2013176331A JP2012042616A JP2012042616A JP2013176331A JP 2013176331 A JP2013176331 A JP 2013176331A JP 2012042616 A JP2012042616 A JP 2012042616A JP 2012042616 A JP2012042616 A JP 2012042616A JP 2013176331 A JP2013176331 A JP 2013176331A
- Authority
- JP
- Japan
- Prior art keywords
- rotor
- leveling
- seedling
- vertical movement
- planting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Landscapes
- Soil Working Implements (AREA)
- Transplanting Machines (AREA)
Abstract
【解決手段】苗タンク51を上昇操作すると整地ロータ上下動機構Rが作動し、整地装置27が全体に上昇するが、中央整地ロータ27bの重量で整地装置27は前下がり姿勢になり、整地装置27や昇降リンク機構3などに負荷がかかることを防止できるので、整地装置27や昇降リンク機構3などの破損が防止されると共に、構成部材の耐久性が向上する。
【選択図】図5
Description
上記構成の整地装置は、旋回時等に苗植付部を上昇させると、それに連動して上方に移動する構成とされているが、中央の整地ロータが左右の整地ロータよりも前方に配置されているため、苗植付部の上昇量が多くなると重量により前方に傾斜しやすく、中央の整地ロータを吊り下げるスプリングや、このスプリングを取り付けるプレートが負荷で破損しやすいという問題がある。
これにより、所定高さまで植付装置が昇降するとそれ以上の上昇は阻止されるが、接触抵抗は上昇に伴い大きくなるため、長期の使用によりカムローラの軸や昇降リンク機構が変形してしまう問題がある。
そこで本発明の課題は、整地装置の上下動を操縦者に負担を掛けないで行うことができ、整地装置とその関連部材を耐久性のある構成とした苗移植機を提供することである。
請求項1に係る発明は、圃場を走行する走行車体(2)と、エンジン(20)と、該エンジン(20)からの駆動力を変速する変速装置を収納したミッションケース(12)と、該ミッションケース(12)からの駆動力を左右の後輪(11)に伝動する後輪伝動(ギヤ)ケース(18)と、圃場面を均す中央整地ロータ(センタロータ)(27b)と該中央整地ロータ(センタロータ)(27b)の左右両側、且つ後側で圃場面を均す左右の側方整地ロータ(サイドロータ)(27a,27a)を一体的に設けた整地装置(27)と、後輪伝動(ギヤ)ケース(18)からの駆動力を左右の側方整地装置(サイドロータ)(27a)の中のどちらか一側に伝動させるための駆動シャフト(27)と、走行車体(2)の後部に昇降リンク機構(3)と、該昇降リンク機構(3)の後部に苗を積載する複数条の苗タンク(苗載台)(51)と、各苗タンク(苗載台)(51)から苗を取って圃場に植え付ける複数条の植付装置(52)とを設けた苗移植機において、前記左右の側方整地ロータ(サイドロータ)(27a)の中のいずれか一方に連結して、整地装置(27)全体の上下位置を変更する左右一対の整地ロータ上下動機構(R)を設けたことを特徴とする苗移植機である。
また、左右のロータ上下動アーム86を一つの回動軸20に装着したことにより、扇形ギヤ85とロータ上下動モータ83を一対設けられる整地ロータ上下動機構Rの左右どちらか一方に配置すればよいため、構成部品が減少し、メンテナンス性の向上や機体の軽量化が図られる。
整地ロータ上下動機構Rを作動させたときは、退避回動アーム90はロータ上下動アーム86の上下回動に連動して上下回動するため、整地装置27の上下位置調節を円滑に行うことができる。
上記苗タンク51の自動的な上昇により、整地装置27が石やゴミと接触して過負荷が掛かることを防止できるので、整地装置27や整地ロータ上下動機構Rが破損することが防止される。
また、接触検知プレート96は多少の圃場面の凹凸を無視するため、圃場面に細かい凹凸があるたびに苗タンク51が上下動することを防止できるので、植付装置52が圃場面から離れて苗を植え付け損なう事が防止される。
図1及び図2は本発明の苗移植機の典型例である粉粒体繰出し装置として施肥装置を装着した乗用型田植機の側面図と平面図である。この施肥装置付き乗用型田植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に施肥装置5の本体部分が設けられている。搭乗オペレータが乗用型田植機の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向と後進方向をそれぞれ前、後という。
予備苗載せ台38は走行車体2のフロアステップ35の下部に基部側を配置した支持機枠49に支持され、移動リンク部材39a,39b,39cを介してそれぞれ上下三段に構成され、第1予備苗載せ台38a、第2予備苗載せ台38b及び第3予備苗載せ台38cからなっている。
また、図3には本実施例で使用する制御装置100のブロック図を示す。
ロータ駆動ケース87のクラッチシフター97及び該シフター97作動用のクラッチケーブル99を後輪伝動ケース18の内側で、かつ機体中央部へ配置している。
また、図1に示すように、ロータ27a,27bの後ろ上方には、ロータカバー37を設け、フロート55,56上に泥がかからないようにしている。
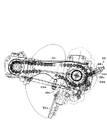
整地装置27(27a,27b)の上下位置を変更する苗植付部4に左右一対設けられた整地ロータ上下動機構Rとして、上下動モータに83と扇形ギヤ85と上下動アーム86と、扇形ギヤ85の回動に伴う角度の変化を検出するポテンショメータ80を設ける。該ポテンショメータ80には、ポテンショアーム80aが上下回動自在に設けられており、該ポテンショアーム80aには、後述する回動軸89に基部を装着した連動ピン80bの端部が装着されている。これにより、回動軸89が回動すると、連動ピン80bがポテンショアーム80aを上昇または下降させ、ポテンショアーム80aの回動角度をポテンショメータ80が検出するものとする。
しかし、本発明により、作業者が手動で整地装置27を下降させる必要が無く、作業能率が向上する。
また左右のロータ上下動アーム86,86を一つの回動軸89に装着したことにより、扇形ギヤ85とロータ上下動モータ83を左右どちらか一方のロータ27a側に配置すればよいため、構成部品が減少し、メンテナンス性の向上や機体の軽量化が図られる。
図10に図9の矢印A方向から見た構成の一部の矢視図で示すように、ロータ上下動アーム86,86の一側面と上方を覆う配置で退避回動アーム90を設け、このロータ上下動アーム86,86とロータ持上げロッド91,91の間に退避回動アーム90,90を設けたことにより、整地装置27が段差や石などに乗り上げて大きく上昇しても、退避回動アーム90,90が回動支点90b,90b;90a,90aを中心に上下回動するので、ロータ上下動アーム86,86は回動軸89,89を中心に下方回動するだけで、整地装置27を上方移動させることができるので、ロータ上下動アーム86,86や回動軸89,89や扇形ギヤ85が負荷により破損することが防止され、耐久性が向上する。
この苗の疎植をしないときはアジャスタ98を緩めて通常の苗の植付間隔が得られるように植付爪52aに動力を伝達するギヤを回動させる。
従って、補助レバー93を操作してセンタフロート55の植付深さフレーム88aを中心にサイドフロート56を回動させて、センタフロート55側の圃場に植え付けた苗を潰さないようにすることができる。
しかしながら、上記手順にて作業をすることにより、畦クラッチを切操作すると苗が前板51cから退避するので、苗が曲がって植付爪52aから離間した姿勢となることが防止される。これにより、植付爪52aで確実に苗を掴み、圃場に確実に苗を植え付けることができるので、作業者が欠株となった箇所に手作業で苗を植え付ける作業が不要となり、作業能率が向上すると共に、作業者の労力が軽減される。
3 昇降リンク装置 4 苗植付部
5 粉粒体繰出し装置(施肥装置) 8 切替スイッチ
10 前輪 11 後輪
11a 後輪駆動軸 12 ミッションケース
13 前輪ファイナルケース 15 メインフレーム
16 変速レバー 18 後輪伝動ケース
20 エンジン 21 ベルト伝動装置
23 HST 25 植付クラッチケース
26 植付伝動軸 27(27a,27b) ロータ
28 施肥伝動機構 30 エンジンカバー
31 座席 32 フロントカバー
33 操縦部 34 ハンドル
35 フロアステップ 36 リヤステップ
37 ロータカバー 38 予備苗載台
40 上リンク 41 下リンク
42 リンクベースフレーム 43 縦リンク
44 連結軸 46 昇降油圧シリンダ
49 支持機枠 50 伝動ケース
51 苗タンク(苗載台) 51a 苗取出口
51b 苗送りベルト 51c 前板
52 苗植付装置 52a 苗植付具(植付爪)
53 ブロア用電動モータ 55 センタフロート
56 サイドフロート 58 ブロア
59 エアチャンバ 60 肥料ホッパ
61 繰出部 62 施肥ホース
63 ロータ昇降用モータ 65 苗植付部支持枠体
65a 支持ローラ 65b 両側辺部材
69 作溝体 70(70a,70b) 駆動軸部
71 連結部材 72 自在継手(伝動シャフト)
73 チェーンケース 74 補強部材
77 カムローラ 77a 回動軸
78 吊下げスプリング
80 扇形ギヤ回動角度検知用ポテンショメータ
81 接触検知プレート作動量検知用ポテンショメータ
83 整地ロータ上下動モータ 85 扇形ギヤ
86 上下動アーム 87 ロータ駆動ケース
88a,88b,88c 植付深さフレーム
88d 植付深さフレームのアーム 89 回動軸
90 退避回動アーム 91 ロータ持上げロッド
92 取付アーム 93 補助レバー
94 昇降リンクセンサ 95 植付伝動ケース
95a 植付伝動チェーン 95b スプロケット
96 接触検知プレート 97 クラッチシフター
98 アジャスタ 98a 軸部
98b スプリング 98c カバー
98d ボルト 99 クラッチケーブル
100 制御装置 R 整地ロータ上下動機構
Claims (5)
- 圃場を走行する走行車体(2)と、エンジン(20)と、該エンジン(20)からの駆動力を変速する変速装置を収納したミッションケース(12)と、該ミッションケース(12)からの駆動力を左右の後輪(11)に伝動する後輪伝動ケース(18)と、圃場面を均す中央整地ロータ(27b)と該中央整地ロータ(27b)の左右両側、且つ後側で圃場面を均す左右の側方整地ロータ(27a,27a)を一体的に設けた整地装置(27)と、後輪伝動ケース(18)からの駆動力を左右の側方整地装置(27a)の中のどちらか一側に伝動させるための駆動シャフト(27)と、走行車体(2)の後部に昇降リンク機構(3)と、該昇降リンク機構(3)の後部に苗を積載する複数条の苗タンク(51)と、各苗タンク(51)から苗を取って圃場に植え付ける複数条の植付装置(52)とを設けた苗移植機において、
前記左右の側方整地ロータ(27a)の中のいずれか一方に連結して、整地装置(27)全体の上下位置を変更する左右一対の整地ロータ上下動機構(R)を設けたことを特徴とする苗移植機。 - 前記昇降リンク機構(3)に現在の昇降位置を検知する昇降位置検知部材(94)を設け、該昇降位置検知部材(94)による昇降リンク機構(3)の昇降時の検知角度から苗タンク(51)の上下位置を識別して、前記苗タンク(51)の上下位置が所定位置に下降すると、整地ロータ上下動装置(R)を作動させて整地装置(27)を圃場に下降させる制御を行う制御装置(100)を備えたことを特徴とする請求項1記載の苗移植機。
- 前記左右の側方整地装置(27a,27a)に整地装置(27)全体を持ち上げるためのロータ持上げロッド(91,91)の下部を連結し、
該左右のロータ持上げロッド(91,91)の上部に左右のロータ上下動アーム(86,86)の一端部側を連結し、
該左右のロータ上下動アーム(86,86)の一端部を苗タンク(51)に支持された回動軸(89)に装着し、
前記左右の側方整地ロータ(27a,27a)のうち、駆動シャフト(72)を設けた側方整地ロータ(27a)側に整地ロータ上下動装置(R)を構成する扇形ギヤ(85)とロータ上下動モータ(83)を配置することを特徴とする請求項2記載の苗移植機。 - 前記ロータ上下動アーム(86,86)とロータ持上げロッド(91,91)の間に退避回動アーム(90,90)を設け、該退避回動アーム(90,90)をロータ持上げロッド(91,91)に設けた回動支点(90a,90a)を中心に上下回動自在に装着し、
該退避回動アーム(90,90)は正面視L字形に形成し、ロータ上下動アーム(86,86)の一側面と上方を覆う形状としたことを特徴とする請求項2記載の苗移植機。 - 苗タンク51の下部に圃場の凹凸に追従して上下回動する接触検知プレート(96)と、
該接触検知プレート(96)を側方整地ロータ(27a)の非整地位置を通して圃場面に先端部を接触させ、接触検知プレートの基部に取り付けた該接触検知プレート(96)の上下回動量を検出する接触検知プレートポテンショメータ(81)と、
該接触検知プレートポテンショメータ(81)で検出される接触検知プレート(96)の上下回動量が所定値になると、昇降油圧シリンダ(46)が苗タンク(51)を自動的に、所定量上昇させる制御構成を有する制御装置(100)を備えた請求項1記載の苗移植機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012042616A JP5957953B2 (ja) | 2012-02-29 | 2012-02-29 | 苗移植機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012042616A JP5957953B2 (ja) | 2012-02-29 | 2012-02-29 | 苗移植機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013176331A true JP2013176331A (ja) | 2013-09-09 |
| JP2013176331A5 JP2013176331A5 (ja) | 2015-05-14 |
| JP5957953B2 JP5957953B2 (ja) | 2016-07-27 |
Family
ID=49268709
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012042616A Active JP5957953B2 (ja) | 2012-02-29 | 2012-02-29 | 苗移植機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5957953B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017188313A1 (ja) * | 2016-04-28 | 2017-11-02 | ヤンマー株式会社 | 田植機 |
| CN110959354A (zh) * | 2018-09-28 | 2020-04-07 | 井关农机株式会社 | 苗移植机 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0731251A (ja) * | 1993-07-16 | 1995-02-03 | Kubota Corp | コンバイン |
| JP2003289701A (ja) * | 2002-04-04 | 2003-10-14 | Matsuyama Plow Mfg Co Ltd | マーカ付農作業機 |
| JP2006296244A (ja) * | 2005-04-18 | 2006-11-02 | Matsuyama Plow Mfg Co Ltd | 農作業機 |
| JP2011244718A (ja) * | 2010-05-25 | 2011-12-08 | Iseki & Co Ltd | 作業機 |
-
2012
- 2012-02-29 JP JP2012042616A patent/JP5957953B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0731251A (ja) * | 1993-07-16 | 1995-02-03 | Kubota Corp | コンバイン |
| JP2003289701A (ja) * | 2002-04-04 | 2003-10-14 | Matsuyama Plow Mfg Co Ltd | マーカ付農作業機 |
| JP2006296244A (ja) * | 2005-04-18 | 2006-11-02 | Matsuyama Plow Mfg Co Ltd | 農作業機 |
| JP2011244718A (ja) * | 2010-05-25 | 2011-12-08 | Iseki & Co Ltd | 作業機 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017188313A1 (ja) * | 2016-04-28 | 2017-11-02 | ヤンマー株式会社 | 田植機 |
| JP2017195840A (ja) * | 2016-04-28 | 2017-11-02 | ヤンマー株式会社 | 田植機 |
| CN110959354A (zh) * | 2018-09-28 | 2020-04-07 | 井关农机株式会社 | 苗移植机 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5957953B2 (ja) | 2016-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5045654B2 (ja) | 乗用型田植機 | |
| JP5957953B2 (ja) | 苗移植機 | |
| JP2014121280A (ja) | 苗移植機 | |
| JP5954468B2 (ja) | 乗用型田植機 | |
| JP5505023B2 (ja) | 苗移植機 | |
| JP6380599B2 (ja) | 苗移植機 | |
| JP2011045280A (ja) | 苗移植機 | |
| JP5761298B2 (ja) | 苗移植機 | |
| JP2008253231A (ja) | 走行車体 | |
| JP2006211995A (ja) | 苗移植機 | |
| JP2006211995A5 (ja) | ||
| JP2011244733A (ja) | 苗移植機 | |
| JP5439731B2 (ja) | 水田作業機 | |
| JP4998223B2 (ja) | 苗移植機 | |
| JP5641096B2 (ja) | 苗移植機 | |
| JP2008301761A (ja) | 作業車体のローリング装置 | |
| JP5136150B2 (ja) | 苗植機 | |
| JP2014007997A (ja) | 苗移植機 | |
| JP6128078B2 (ja) | 苗移植機 | |
| JP4775106B2 (ja) | 苗移植機 | |
| JP5391859B2 (ja) | 作業機 | |
| JP5532694B2 (ja) | 苗移植機 | |
| JP5136464B2 (ja) | 苗植機 | |
| JP5590017B2 (ja) | 乗用型田植機 | |
| JP2014103918A (ja) | 苗移植機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150224 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150330 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160606 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5957953 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |