JP2012203785A - 移動体通信装置及び走行支援方法 - Google Patents
移動体通信装置及び走行支援方法 Download PDFInfo
- Publication number
- JP2012203785A JP2012203785A JP2011069583A JP2011069583A JP2012203785A JP 2012203785 A JP2012203785 A JP 2012203785A JP 2011069583 A JP2011069583 A JP 2011069583A JP 2011069583 A JP2011069583 A JP 2011069583A JP 2012203785 A JP2012203785 A JP 2012203785A
- Authority
- JP
- Japan
- Prior art keywords
- intersection
- traffic
- vehicle
- information
- information indicating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Traffic Control Systems (AREA)
Abstract
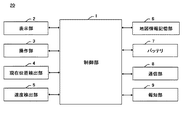
【解決手段】移動体に備えられ、方路に対応付けられた信号機を示す情報を含む交差点情報と、少なくとも現在の信号表示を示す情報及び次の信号表示までの時間を示す情報を含む信号機情報と、を受信する通信部と、移動体の現在位置を示す情報及び進行方向を示す情報を取得して、移動体の交通を規制する信号機を特定し、移動体の交通を規制する信号機が設置された交差点が通過可能交差点であるか否かを判定し、通過可能交差点でないと判定されるまで判定を繰り返し、通過可能交差点でないと判定されたときに所定の制御を行う制御部と、を備える。
【選択図】図1
Description
[第1実施形態]
本発明のナビゲーション装置20の第1実施形態について図2を用いて説明する。図2は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第1のフローチャートである。
[第2実施形態]
本発明のナビゲーション装置20の第2実施形態について図4を用いて説明する。図4は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第2のフローチャートである。なお、本実施形態のステップS11〜ステップS13、ステップS15〜ステップS16は、それぞれ第1実施形態のステップS01〜ステップS03、ステップS04〜ステップS05と同一であるため説明を省略する。
[その他の実施形態]
なお、本発明は上述した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で変更することが可能である。
2・・・表示部
3・・・操作部
4・・・現在位置検出部
5・・・速度検出部
6・・・地図情報記憶部
7・・・バッテリ
8・・・通信部
9・・・報知部
20・・・ナビゲーション装置
Claims (5)
- 移動体に備えられ、
方路に対応付けられた信号機を示す情報を含む交差点情報と、少なくとも現在の信号表示を示す情報及び次の信号表示までの時間を示す情報を含む信号機情報と、を受信する通信部と、
前記移動体の現在位置を示す情報及び進行方向を示す情報を取得して、前記移動体の交通を規制する信号機を特定し、当該移動体の交通を規制する信号機が設置された交差点が通過可能交差点であるか否かを判定し、当該交差点が通過可能交差点であると判定したとき前記判定を繰り返し、当該交差点が通過可能交差点でないと判定したときに所定の制御を行う制御部と、
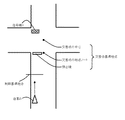
を備えることを特徴とする移動体通信装置。 - 前記制御部は、前記移動体の現在位置が前記移動体の交通を規制する信号機が設置された交差点に対応付けられた制御基準地点を通過しているときは、当該交差点について前記判定又は前記所定の制御を行わないことを特徴とする請求項1に記載の移動体通信装置。
- 前記所定の制御は、報知部を制御して前記移動体の交通を規制する信号機が設置された交差点が通過可能交差点でないこと及び/又は前記移動体の交通を規制する信号機が設置された交差点が通過可能交差点となる速度の範囲を報知することであることを特徴とする請求項1又は請求項2に記載の移動体通信装置。
- 前記所定の制御は、前記移動体の移動速度を、前記移動体の交通を規制する信号機が設置された交差点が通過可能交差点となる速度に変更することであることを特徴とする請求項1又は請求項2に記載の移動体通信装置。
- 移動体に備えられた移動体通信装置の走行支援方法であって、
方路に対応付けられた信号機を示す情報を含む交差点情報と、少なくとも現在の信号表示を示す情報及び次の信号表示までの時間を示す情報を含む信号機情報と、を取得するステップと、
前記移動体の現在位置を示す情報及び進行方向を示す情報を取得するステップと、
前記移動体の交通を規制する信号機を特定するステップと、
当該移動体の交通を規制する信号機が設置された交差点が通過可能交差点であるか否かを判定するステップと、
当該交差点が通過可能交差点であると判定したとき前記判定を繰り返すステップと、
当該交差点が通過可能交差点でないと判定したときに所定の制御を行うステップと、
を有することを特徴とする走行支援方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011069583A JP2012203785A (ja) | 2011-03-28 | 2011-03-28 | 移動体通信装置及び走行支援方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011069583A JP2012203785A (ja) | 2011-03-28 | 2011-03-28 | 移動体通信装置及び走行支援方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012203785A true JP2012203785A (ja) | 2012-10-22 |
Family
ID=47184691
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011069583A Pending JP2012203785A (ja) | 2011-03-28 | 2011-03-28 | 移動体通信装置及び走行支援方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012203785A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017033216A (ja) * | 2015-07-31 | 2017-02-09 | トヨタ自動車株式会社 | 信号通過支援装置 |
| KR101740470B1 (ko) * | 2015-05-18 | 2017-05-31 | 한국교통연구원 | 딜레마 존과 사고위험 존 등에 대한 경고 시스템 및 이를 위한 신호등 |
| DE102017101881A1 (de) | 2016-02-02 | 2017-08-03 | Toyota Jidosha Kabushiki Kaisha | Unterstützungsvorrichtung zum Passieren eines Signals |
| WO2019163262A1 (ja) * | 2018-02-23 | 2019-08-29 | 住友電気工業株式会社 | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム |
| JP2019215779A (ja) * | 2018-06-14 | 2019-12-19 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 車両の走行支援システム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008296798A (ja) * | 2007-06-01 | 2008-12-11 | Denso Corp | 車両の制御装置 |
| JP2009176221A (ja) * | 2008-01-28 | 2009-08-06 | Toyota Motor Corp | 運転支援装置 |
-
2011
- 2011-03-28 JP JP2011069583A patent/JP2012203785A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008296798A (ja) * | 2007-06-01 | 2008-12-11 | Denso Corp | 車両の制御装置 |
| JP2009176221A (ja) * | 2008-01-28 | 2009-08-06 | Toyota Motor Corp | 運転支援装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101740470B1 (ko) * | 2015-05-18 | 2017-05-31 | 한국교통연구원 | 딜레마 존과 사고위험 존 등에 대한 경고 시스템 및 이를 위한 신호등 |
| JP2017033216A (ja) * | 2015-07-31 | 2017-02-09 | トヨタ自動車株式会社 | 信号通過支援装置 |
| DE102017101881A1 (de) | 2016-02-02 | 2017-08-03 | Toyota Jidosha Kabushiki Kaisha | Unterstützungsvorrichtung zum Passieren eines Signals |
| WO2019163262A1 (ja) * | 2018-02-23 | 2019-08-29 | 住友電気工業株式会社 | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム |
| CN111788615A (zh) * | 2018-02-23 | 2020-10-16 | 住友电气工业株式会社 | 交通信号控制装置、交通信号控制方法和计算机程序 |
| JPWO2019163262A1 (ja) * | 2018-02-23 | 2021-02-25 | 住友電気工業株式会社 | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム |
| US11270580B2 (en) | 2018-02-23 | 2022-03-08 | Sumitomo Electric Industries, Ltd. | Traffic signal control apparatus, traffic signal control method, and computer program |
| JP7276311B2 (ja) | 2018-02-23 | 2023-05-18 | 住友電気工業株式会社 | 交通信号制御装置、交通信号制御方法、及びコンピュータプログラム |
| JP2019215779A (ja) * | 2018-06-14 | 2019-12-19 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 車両の走行支援システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2013094302A1 (ja) | 移動体通信装置及び通信制御方法 | |
| CN102077258B (zh) | 驾驶辅助装置 | |
| JP5895258B2 (ja) | 移動体通信装置及び走行支援方法 | |
| US20200349843A1 (en) | Roadside device, communication system, and danger detection method | |
| US7545286B2 (en) | Self-propelled vehicle safety urging system, self-propelled vehicle safety urging method, and safety urging information processing program | |
| JP2017013605A (ja) | 車載システム | |
| JPWO2010095236A1 (ja) | 移動体位置検出装置 | |
| JP2012043260A (ja) | 移動体通信装置 | |
| JP2017107288A (ja) | 歩行者端末装置、歩車間通信システムおよび歩行者情報送信方法 | |
| JP2011221573A (ja) | 運転支援装置および運転支援システム | |
| JP2012203785A (ja) | 移動体通信装置及び走行支援方法 | |
| JP2015064733A (ja) | 運転支援装置及び運転支援方法 | |
| CN112400096A (zh) | 行驶辅助方法和行驶辅助装置 | |
| JP4900120B2 (ja) | 駐停車判定装置 | |
| JP6001852B2 (ja) | 移動体通信装置 | |
| JP2013050803A (ja) | 移動体通信装置及び追突防止支援方法 | |
| JP5745295B2 (ja) | 移動体通信装置及び移動体情報の送信制御方法 | |
| JP5338561B2 (ja) | 車両用路車間通信装置 | |
| JP5723559B2 (ja) | 移動体通信装置 | |
| JP2015041180A (ja) | 運転支援システム、方法およびプログラム | |
| JP2013029899A (ja) | 移動体通信装置及び走行支援方法 | |
| JP2017182409A (ja) | 運転支援装置、運転支援システム及び運転支援プログラム | |
| JP2012047147A (ja) | 制御装置 | |
| JP2012088983A (ja) | 移動体通信装置 | |
| JP2014063239A (ja) | 移動体情報通信装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140128 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140902 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150512 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20150729 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151006 |