JP2012199802A - 撮像装置、及びその制御方法、プログラム - Google Patents
撮像装置、及びその制御方法、プログラム Download PDFInfo
- Publication number
- JP2012199802A JP2012199802A JP2011062925A JP2011062925A JP2012199802A JP 2012199802 A JP2012199802 A JP 2012199802A JP 2011062925 A JP2011062925 A JP 2011062925A JP 2011062925 A JP2011062925 A JP 2011062925A JP 2012199802 A JP2012199802 A JP 2012199802A
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- vibration
- image
- distortion amount
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/53—Control of the integration time
- H04N25/531—Control of the integration time by controlling rolling shutters in CMOS SSIS
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6811—Motion detection based on the image signal
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Abstract
【解決手段】ローリングシャッタ方式で駆動する撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出し、検出された振動の時間特性を取得する。振動の時間特性について、振動に起因して画像に生じる被写体像の歪み量の周波数分布を解析し、当該周波数分布から歪み量が極大となる周波数を、歪み量の中心周波数として決定する。そして少なくとも中心周波数について、振動の時間特性を取得した際に生じた位相ズレがなくなるように、振動の時間特性を補償し、補償後の振動の時間特性から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する。
【選択図】図2
Description
ローリングシャッタ方式で駆動する撮像素子を備える撮像装置であって、撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出する検出手段と、検出手段により検出された振動の時間特性を取得する取得手段と、振動の時間特性について、振動に起因して画像に生じる被写体像の歪み量の周波数分布を解析する解析手段と、歪み量の周波数分布から、当該歪み量が極大となる周波数を歪み量の中心周波数として決定する決定手段と、少なくとも中心周波数について、前記取得手段により生じた位相ズレがなくなるように、振動の時間特性を補償する補償手段と、補償手段により補償された振動から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する補正手段と、を備えることを特徴とする。
ローリングシャッタ方式で駆動する撮像素子を備える撮像装置であって、撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出する検出手段と、検出手段により検出された振動の時間特性を取得する取得手段と、画像を撮像時の撮像装置のパラメータに基づいて、振動に起因して画像に生じる被写体像の歪み量の中心周波数が存在すると推定される周波数帯を含む複数の周波数を検波周波数として選択する第1の選択手段と、振動の時間特性について、振動のうちの検波周波数に起因して画像に生じる被写体像の歪み量の周波数分布を解析する解析手段と、歪み量の周波数分布から、当該歪み量が極大となる周波数を歪み量の中心周波数として決定する決定手段と、少なくとも中心周波数について、前記取得手段により生じた位相ズレがなくなるように、振動の時間特性を補償する補償手段と、補償手段により補償された振動から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する補正手段と、を備えることを特徴とする。
以下、本発明の好適な一実施形態について、図面を参照して詳細に説明する。なお、以下に説明する一実施形態は、撮像装置の一例としての、ローリングシャッタ問題による歪みのうち、手ぶれに起因して生じる歪みを補正可能なデジタルビデオカメラに、本発明を適用した例を説明する。しかし、本発明は、ローリングシャッタ問題による歪みのうち、手ぶれに起因して生じる歪みを補正することが可能な任意の機器に適用可能である。また、本明細書において、「ローリングシャッタ問題により生じる歪み」のうち、手ぶれに起因して生じる歪みを「ローリング歪み」として記載し、以下に説明するものとする。
図1は、本発明の実施形態に係るデジタルビデオカメラ100の機能構成を示すブロック図である。
ここで、歪み補正量算出部106の内部構成、及び歪み補正量算出部106内で行われる処理について、図を用いて以下に詳細に説明する。
fL・tanθ/p
ここで、fLは焦点距離、pは撮像素子上の画素ピッチである。
A(f)・sin(ωt) (ω=2πf)
と表すことができる。即ち、周波数ごとの振動の速度は、手ぶれの時間特性を微分して
A(f)ω・cos(ωt)
と表すことができる。
A(f)ω・cos(ωt0)・Δt
と表すことができる。当該式から、既にブレ量解析部202より得られているA(f)(図5(b))を分離し、ωt0が一定として近似すると、残りの項は
ω・cos(ωt0)・Δt
⇒2π・cos(ωt0)・Δt×f=c×f (c=const.)
と変形でき、図5(c)のような周波数に対する一次関数で表すことができる。
以上説明したように、本実施形態の撮像装置は、ローリングシャッタ問題による歪みを補正する場合の補正残り、あるいは過補正を低減することができる。具体的には撮像装置は、ローリングシャッタ方式で駆動する撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出し、検出された振動の時間特性を取得する。振動の時間特性について、振動に起因して画像に生じる被写体像の歪み量の周波数分布を解析し、当該周波数分布から歪み量が極大となる周波数を、歪み量の中心周波数として決定する。そして少なくとも中心周波数について、振動の時間特性を取得した際に生じた位相ズレがなくなるように、振動の時間特性を補償し、補償後の振動の時間特性から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する。
上述した実施形態1では、手ぶれの時間特性の全ての周波数についてブレ量の周波数分布を解析して中心周波数を決定する方法について説明した。本実施形態2では、限られた周波数についてのブレ量の周波数分布を解析することにより中心周波数を決定する方法について説明する。
図2(b)は、本実施形態に係る歪み補正量算出部106の内部構成を示した図である。なお、本実施形態の歪み補正量算出部106において、上述した実施形態1と同一の構成については、同一の参照符号を付して説明を省略し、本実施形態に特徴的な構成あるいは処理の説明に留める。
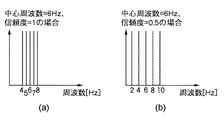
1番目:(2+2)/2=2Hz
2番目:(3+7)/2=5Hz
3番目:(4+8)/2=6Hz
4番目:(5+9)/2=7Hz
5番目:(12+12)/2=12Hz
となる(図12(c)に示される)。
上述した実施形態2では、検波周波数決定部212は補助情報のパラメータそれぞれについて選択された固定の検波周波数のセットの平均をとって、実際の手ぶれの時間特性を検波する検波周波数のセットを決定するものとして説明した。本変形例1では、補助情報のパラメータそれぞれについて推定した撮影状況について信頼度を設け、各撮影状況の中心周波数の信頼度に基づいて検波周波数のセットを決定する方法について説明する。
上述した実施形態1及び変形例1では、検波周波数決定部212が決定した検波周波数のセットについて検波を行って、手ぶれの時間特性についての中心周波数を、当該検波周波数のセットのうち、歪み量が極大となる周波数に決定するものとして説明した。本変形例ではさらに、検波周波数で手ぶれの時間特性を検波した結果の歪み量の周波数分布をフィードバックすることにより、より正確な中心周波数を決定する方法について説明する。
図2(c)は、本変形例に係る歪み補正量算出部106の内部構成を示した図である。なお、本実施形態の歪み補正量算出部106において、上述した実施形態1及び実施形態2と同一の構成については、同一の参照符号を付して説明を省略し、本実施形態に特徴的な構成あるいは処理の説明に留める。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (9)
- ローリングシャッタ方式で駆動する撮像素子を備える撮像装置であって、
前記撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における前記撮像装置の振動を検出する検出手段と、
前記検出手段により検出された前記振動の時間特性を取得する取得手段と、
前記振動の時間特性について、前記振動に起因して前記画像に生じる被写体像の歪み量の周波数分布を解析する解析手段と、
前記歪み量の周波数分布から、当該歪み量が極大となる周波数を前記歪み量の中心周波数として決定する決定手段と、
少なくとも前記中心周波数について、前記取得手段により生じた位相ズレがなくなるように、前記振動の時間特性を補償する補償手段と、
前記補償手段により補償された前記振動から算出された補正量を用いて、前記撮像素子のラインごとに前記振動に起因して生じた被写体像の歪みを補正する補正手段と、
を備えることを特徴とする撮像装置。 - ローリングシャッタ方式で駆動する撮像素子を備える撮像装置であって、
前記撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における前記撮像装置の振動を検出する検出手段と、
前記検出手段により検出された前記振動の時間特性を取得する取得手段と、
前記画像を撮像時の前記撮像装置のパラメータに基づいて、前記振動に起因して前記画像に生じる被写体像の歪み量の中心周波数が存在すると推定される周波数帯を含む複数の周波数を検波周波数として選択する第1の選択手段と、
前記振動の時間特性について、前記振動のうちの前記検波周波数に起因して前記画像に生じる被写体像の歪み量の周波数分布を解析する解析手段と、
前記歪み量の周波数分布から、当該歪み量が極大となる周波数を前記歪み量の中心周波数として決定する決定手段と、
少なくとも前記中心周波数について、前記取得手段により生じた位相ズレがなくなるように、前記振動の時間特性を補償する補償手段と、
前記補償手段により補償された前記振動から算出された補正量を用いて、前記撮像素子のラインごとに前記振動に起因して生じた被写体像の歪みを補正する補正手段と、
を備えることを特徴とする撮像装置。 - 前記解析手段で解析された前記歪み量の周波数分布に基づいて、前記検波周波数とは異なる新たな検波周波数を選択する第2の選択手段をさらに備え、
前記解析手段は、前記振動の時間特性について前記振動のうちの前記新たな検波周波数に起因して前記画像に生じる被写体像の歪み量の周波数分布を解析し、
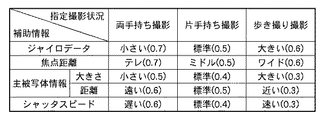
前記決定手段は、前記検波周波数についての歪み量の周波数分布、及び前記新たな検波周波数についての歪み量の周波数分布を用いて、前記中心周波数を決定することを特徴とする請求項2に記載の撮像装置。 - 前記撮像時のパラメータは、撮像時の振動、焦点距離、主被写体情報、及びシャッタスピードの少なくともいずれかであり、
前記第1の選択手段は、前記撮像時のパラメータに基づいて前記画像を撮像時の前記撮像装置の撮影状況を推定し、当該推定された撮影状況ごとに予め定められた周波数を用いて前記検波周波数を選択することを特徴とする請求項2または3に記載の撮像装置。 - 前記第1の選択手段は、前記推定された撮影状況ごとに予め定められた周波数と当該撮影状況の推定の信頼度とに基づいて前記検波周波数を選択することを特徴とする請求項4に記載の撮像装置。
- 前記解析手段は、前記撮像素子の連続するライン間で前のラインが露光開始してから次のラインが露光開始するまでの期間の前記振動に起因して前記画像に生じる被写体像の歪み量の周波数分布を解析することを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。
- ローリングシャッタ方式で駆動する撮像素子を備える撮像装置の制御方法であって、
検出手段が、前記撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における前記撮像装置の振動を検出する検出工程と、
取得手段が、前記検出工程において検出された前記振動の時間特性を取得する取得工程と、
解析手段が、前記振動の時間特性について、前記振動に起因して前記画像に生じる被写体像の歪み量の周波数分布を解析する解析工程と、
決定手段が、前記歪み量の周波数分布から、当該歪み量が極大となる周波数を前記歪み量の中心周波数として決定する決定工程と、
補償手段が、少なくとも前記中心周波数について、前記取得工程において生じた位相ズレがなくなるように、前記振動の時間特性を補償する補償工程と、
補正手段が、前記補償工程において補償された前記振動から算出された補正量を用いて、前記撮像素子のラインごとに前記振動に起因して生じた被写体像の歪みを補正する補正工程と、
を備えることを特徴とする撮像装置の制御方法。 - ローリングシャッタ方式で駆動する撮像素子を備える撮像装置の制御方法であって、
検出手段が、前記撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における前記撮像装置の振動を検出する検出工程と、
取得手段が、前記検出工程において検出された前記振動の時間特性を取得する取得工程と、
第1の選択手段が、前記画像の撮像時のパラメータから、前記振動に起因して前記画像に生じる被写体像の歪み量の中心周波数が存在すると推定される周波数帯を含む複数の周波数を検波周波数として選択する第1の選択工程と、
解析手段が、前記振動の時間特性について、前記振動のうちの前記検波周波数に起因して前記画像に生じる被写体像の歪み量の周波数分布を解析する解析工程と、
決定手段が、前記歪み量の周波数分布から、当該歪み量が極大となる周波数を前記歪み量の中心周波数として決定する決定工程と、
補償手段が、少なくとも前記中心周波数について、前記取得工程において生じた位相ズレがなくなるように、前記振動の時間特性を補償する補償工程と、
補正手段が、前記補償工程において補償された前記振動から算出された補正量を用いて、前記撮像素子のラインごとに前記振動に起因して生じた被写体像の歪みを補正する補正工程と、
を備えることを特徴とする撮像装置の制御方法。 - コンピュータを、請求項1乃至6のいずれか1項に記載の撮像装置の各手段として機能させるためのプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011062925A JP5249377B2 (ja) | 2011-03-22 | 2011-03-22 | 撮像装置、及びその制御方法、プログラム |
| US13/407,897 US8970712B2 (en) | 2011-03-22 | 2012-02-29 | Image sensing apparatus for correcting image distortion caused by hand shake, and control method thereof |
| CN201210078556.3A CN102694979B (zh) | 2011-03-22 | 2012-03-22 | 摄像设备和摄像设备的控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011062925A JP5249377B2 (ja) | 2011-03-22 | 2011-03-22 | 撮像装置、及びその制御方法、プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012199802A true JP2012199802A (ja) | 2012-10-18 |
| JP5249377B2 JP5249377B2 (ja) | 2013-07-31 |
Family
ID=46860246
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011062925A Active JP5249377B2 (ja) | 2011-03-22 | 2011-03-22 | 撮像装置、及びその制御方法、プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8970712B2 (ja) |
| JP (1) | JP5249377B2 (ja) |
| CN (1) | CN102694979B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015190317A1 (ja) * | 2014-06-11 | 2015-12-17 | ソニー株式会社 | 画像処理装置、画像処理方法、およびプログラム |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9460495B2 (en) * | 2012-04-06 | 2016-10-04 | Microsoft Technology Licensing, Llc | Joint video stabilization and rolling shutter correction on a generic platform |
| WO2014068779A1 (ja) * | 2012-11-05 | 2014-05-08 | 株式会社モルフォ | 画像処理装置、画像処理方法、画像処理プログラム及び記録媒体 |
| JP5794705B2 (ja) * | 2013-02-01 | 2015-10-14 | キヤノン株式会社 | 撮像装置、その制御方法及びプログラム |
| JP6097936B2 (ja) * | 2013-03-22 | 2017-03-22 | パナソニックIpマネジメント株式会社 | ブレ補正装置、交換レンズ、カメラシステム |
| US10136063B2 (en) * | 2013-07-12 | 2018-11-20 | Hanwha Aerospace Co., Ltd | Image stabilizing method and apparatus |
| JP6150655B2 (ja) * | 2013-08-01 | 2017-06-21 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、レンズ鏡筒、光学機器、並びに撮像装置 |
| JP6257207B2 (ja) * | 2013-08-01 | 2018-01-10 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、レンズ鏡筒、並びに撮像装置 |
| CN103841336B (zh) * | 2014-03-28 | 2016-09-28 | 深圳市大疆创新科技有限公司 | 成像设备及其快门控制方法 |
| WO2015156151A1 (ja) * | 2014-04-11 | 2015-10-15 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法及びプログラム |
| JP2016019076A (ja) * | 2014-07-07 | 2016-02-01 | ソニー株式会社 | 撮像装置、撮像方法、およびプログラム、並びに再生装置 |
| FR3027143B1 (fr) * | 2014-10-10 | 2016-11-11 | Parrot | Appareil mobile, notamment drone a voilure tournante, muni d'une camera video delivrant des sequences d'images corrigees dynamiquement de l'effet "wobble" |
| JP6598549B2 (ja) * | 2015-07-23 | 2019-10-30 | キヤノン株式会社 | 画像処理装置およびその制御方法、撮像装置およびその制御方法 |
| CN105657273B (zh) * | 2016-02-19 | 2018-09-04 | 广东欧珀移动通信有限公司 | 安全快门时间的设定方法、装置及移动终端 |
| CN107493686B (zh) * | 2016-04-13 | 2019-11-29 | 华为技术有限公司 | 一种设定曝光时长的方法、装置以及照相设备 |
| CN106027885B (zh) * | 2016-05-18 | 2020-01-10 | Oppo广东移动通信有限公司 | 电子装置方法及装置、第一电子装置及第二电子装置 |
| WO2017206079A1 (zh) * | 2016-05-31 | 2017-12-07 | 深圳曼塔智能科技有限公司 | 一种无人机及其影像防抖装置和方法 |
| CN110166697B (zh) * | 2019-06-28 | 2021-08-31 | Oppo广东移动通信有限公司 | 摄像头防抖方法、装置、电子设备和计算机可读存储介质 |
| CN112308783A (zh) * | 2019-07-24 | 2021-02-02 | 株式会社理光 | 一种卷帘效应校正方法、装置及计算机可读存储介质 |
| CN112161694B (zh) * | 2020-09-21 | 2022-07-05 | 武汉大学 | 高速摄像机自身受环境激振引起误差的测量方法 |
| CN112215782B (zh) * | 2020-10-29 | 2022-10-14 | 中国科学院长春光学精密机械与物理研究所 | 一种卷帘快门成像装置图像校正方法及装置 |
| CN112637496B (zh) * | 2020-12-21 | 2022-05-31 | 维沃移动通信有限公司 | 图像矫正方法及装置 |
| CN113472991B (zh) * | 2021-07-09 | 2023-04-25 | Oppo广东移动通信有限公司 | 控制方法、控制装置、摄像头组件、电子设备和介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007189602A (ja) * | 2006-01-16 | 2007-07-26 | Pentax Corp | 撮像装置 |
| JP2010016700A (ja) * | 2008-07-04 | 2010-01-21 | Canon Inc | 振れ補正装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4389779B2 (ja) | 2004-12-27 | 2009-12-24 | ソニー株式会社 | 撮像画像信号の歪み補正方法および撮像画像信号の歪み補正装置 |
| EP2023610A4 (en) * | 2006-03-22 | 2010-09-22 | Victor Company Of Japan | FIXED IMAGE ACQUISITION DEVICE, FIXED IMAGE ACQUISITION METHOD, AND IMAGE FLUCTUATION CORRECTION DEVICE |
| US20100085436A1 (en) * | 2007-03-23 | 2010-04-08 | Kabushiki Kaisha Toshiba | Hand movement correction apparatus, image pickup apparatus, hand movement correction program, image pickup program, hand movement correction method |
| JP5298269B2 (ja) * | 2007-12-25 | 2013-09-25 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | 振動補償制御回路 |
| JP2011039340A (ja) * | 2009-08-13 | 2011-02-24 | Sony Corp | 撮像装置 |
-
2011
- 2011-03-22 JP JP2011062925A patent/JP5249377B2/ja active Active
-
2012
- 2012-02-29 US US13/407,897 patent/US8970712B2/en not_active Expired - Fee Related
- 2012-03-22 CN CN201210078556.3A patent/CN102694979B/zh not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007189602A (ja) * | 2006-01-16 | 2007-07-26 | Pentax Corp | 撮像装置 |
| JP2010016700A (ja) * | 2008-07-04 | 2010-01-21 | Canon Inc | 振れ補正装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015190317A1 (ja) * | 2014-06-11 | 2015-12-17 | ソニー株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| JP2016001771A (ja) * | 2014-06-11 | 2016-01-07 | ソニー株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| US9906693B2 (en) | 2014-06-11 | 2018-02-27 | Sony Semiconductor Solutions Corporation | Image processing apparatus, image processing method, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| US8970712B2 (en) | 2015-03-03 |
| US20120242847A1 (en) | 2012-09-27 |
| CN102694979A (zh) | 2012-09-26 |
| CN102694979B (zh) | 2016-01-20 |
| JP5249377B2 (ja) | 2013-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5249377B2 (ja) | 撮像装置、及びその制御方法、プログラム | |
| JP5501119B2 (ja) | 撮像装置およびその制御方法 | |
| JP5409342B2 (ja) | 撮像装置及びその制御方法 | |
| JP6530602B2 (ja) | 撮像装置及びその制御方法 | |
| JP6478504B2 (ja) | 撮像装置およびその制御方法 | |
| JP7277513B2 (ja) | レンズ装置、レンズ装置の制御方法およびレンズ装置の制御プログラム、 | |
| US10425584B2 (en) | Image pickup system, control method thereof, image pickup apparatus, and lens device | |
| JP2011139167A (ja) | 撮像装置及び振れ補正方法 | |
| JP6108940B2 (ja) | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 | |
| JP2017090580A (ja) | 像ブレ補正装置及び方法 | |
| JP2011029735A (ja) | 画像処理装置、撮像装置及び画像処理方法 | |
| JP2011139167A5 (ja) | 撮像装置及びその制御方法 | |
| US20150256753A1 (en) | Image stabilization apparatus, method of controlling the same, image capturing apparatus, lens apparatus, and storage medium | |
| JP2007114466A (ja) | 手ぶれ補正機能を有する撮影装置 | |
| JP2018056753A (ja) | カメラコントローラ、画像処理モジュール、および半導体システム | |
| JP2012058545A (ja) | 撮像装置 | |
| JP5249378B2 (ja) | 撮像装置、及びその制御方法、プログラム | |
| US10771700B2 (en) | Image blur correction apparatus, interchangeable lens, camera body, image blur correction method, and storage medium | |
| JP3865126B2 (ja) | 画像処理装置および方法、記録媒体、並びにプログラム | |
| US10848675B2 (en) | Image blur correction apparatus, camera body, image blur correction method, and storage medium | |
| JP7236268B2 (ja) | 像ブレ補正装置、交換レンズ、カメラ本体、像ブレ補正方法、及びプログラム | |
| JP3865125B2 (ja) | 画像処理装置および方法、記録媒体、並びにプログラム | |
| JP2008148049A (ja) | 振動補正装置、およびこれを用いた撮像装置、並びに振動補正装置の駆動方法 | |
| JP2014126859A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2005141207A (ja) | ブレ補正装置、およびカメラシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130411 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160419 Year of fee payment: 3 |