JP2012144993A - 可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置 - Google Patents
可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置 Download PDFInfo
- Publication number
- JP2012144993A JP2012144993A JP2011001926A JP2011001926A JP2012144993A JP 2012144993 A JP2012144993 A JP 2012144993A JP 2011001926 A JP2011001926 A JP 2011001926A JP 2011001926 A JP2011001926 A JP 2011001926A JP 2012144993 A JP2012144993 A JP 2012144993A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- motor rotation
- abnormality diagnosis
- valve timing
- state detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003745 diagnosis Methods 0.000 claims abstract description 108
- 230000008859 change Effects 0.000 claims abstract description 22
- 230000005856 abnormality Effects 0.000 claims description 123
- 238000001514 detection method Methods 0.000 claims description 38
- 238000002485 combustion reaction Methods 0.000 claims description 7
- 230000002159 abnormal effect Effects 0.000 abstract description 18
- 230000007423 decrease Effects 0.000 abstract 1
- 238000003708 edge detection Methods 0.000 description 28
- 238000000034 method Methods 0.000 description 28
- 230000008569 process Effects 0.000 description 22
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000979 retarding effect Effects 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Valve-Gear Or Valve Arrangements (AREA)
- Valve Device For Special Equipments (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
【解決手段】エンジンのクランク軸10の回転速度の1/2の回転速度に対してモータ18の回転速度を調整することでクランク軸10に対するカム軸13の回転位相(カム軸位相)を変化させてバルブタイミングを変化させる。モータ18を駆動するEDU23は、モータ回転位置に応じた位置信号とモータ回転方向に応じた方向信号をECU22に出力する。モータ回転速度が小さくなると、位置信号や方向信号のエッジを検出できないためにモータ回転状態検出系の異常診断を誤判定する可能性がある。この対策として、ECU22は、カム軸位相変化速度とエンジン回転速度に基づいてモータ回転速度を推定し、モータ回転速度が0付近の所定範囲内にあるときに異常診断を禁止する。
【選択図】図1
Description
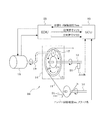
まず、図1に基づいて可変バルブタイミング制御システムの構成を説明する。
内燃機関であるエンジンのクランク軸10は、タイミングチェーン11(又はタイミングベルト)とカムスプロケット12を介してカムシャフト13に連結されている。カム軸13には、エンジンの吸気バルブ又は排気バルブを開閉駆動するためのカムが設けられている。カムスプロケット12とカム軸13との間にはバルブタイミング調整機構14が設けられている。
図2[a]に示すように、位置信号VTSは、モータ回転位置が所定角度変化する毎に変化するパルス信号である。また、図2[b]に示すように、方向信号VTDは、位置信号VTSと同期して変化するパルス信号であり、モータ18が正方向(カム軸13の回転方向と同一の方向)に回転するときには、方向信号VTDが位置信号VTSと同一位相で変化する。一方、図2[c]に示すように、モータ18が逆方向に回転するときには、方向信号VTDが位置信号VTSと逆位相で変化する。このような関係から、位置信号VTSと方向信号VTDとが同一位相であるときには、モータ回転方向が正方向であると判断し、位置信号VTSと方向信号VTDと逆位相であるときにはモータ回転方向が逆方向であると判断するといったように、位置信号VTSと方向信号VTDとの関係に基づいてモータ回転方向を推定することができる。
まず、図3を用いて位置信号VTSの異常診断方法の一例を説明する。
ハード回路又は高速ソフト処理により周期的に発生する位置信号VTSがHi→Lo又はLo→Hiに切り換わるタイミング(位置信号VTSのエッジ)を検出し、このエッジ検出情報を所定の診断処理周期(例えば40ms周期)で取り込んでエッジ検出フラグxvtsを次のようにしてセット/リセットする。例えば、エッジ検出フラグxvtsが「0」の状態で、位置信号VTSのエッジが検出されれば、エッジ検出フラグxvtsを「1」にセットし、エッジ検出フラグxvtsが「1」の状態で、位置信号VTSのエッジが検出されれば、エッジ検出フラグxvtsをそのまま「1」に維持する。所定の診断処理周期(例えば40ms周期)でエッジ検出フラグxvtsを判定し、エッジ検出フラグxvtsが「1」であれば、正常カウンタcvtsnorml をインクリメントして異常カウンタcvtsfault を「0」にリセットすると共に、エッジ検出フラグxvtsを「0」にリセットする。このような処理を繰り返して、正常カウンタcvtsnorml のカウント値が正常判定回数しきい値KJDGEOK を越えた時点で、位置信号VTSが正常であると判定して正常判定フラグを「1」にセットし、異常判定フラグを「0」に維持又はリセットする。
ハード回路又は高速ソフト処理により周期的に発生する方向信号VTDがHi→Lo又はLo→Hiに切り換わるタイミング(方向信号VTDのエッジ)を検出し、このエッジ検出情報を所定の診断処理周期(例えば40ms周期)で取り込んでエッジ検出フラグxvtdを次のようにしてセット/リセットする。例えば、エッジ検出フラグxvtdが「0」の状態で、方向信号VTDのエッジが検出されれば、エッジ検出フラグxvtdを「1」にセットし、エッジ検出フラグxvtdが「1」の状態で、方向信号VTDのエッジが検出されれば、エッジ検出フラグxvtdをそのまま「1」に維持する。所定の診断処理周期(例えば40ms周期)でエッジ検出フラグxvtdを判定し、エッジ検出フラグxvtdが「1」であれば、正常カウンタcvtdnorml をインクリメントして異常カウンタcvtdfault を「0」にリセットすると共に、エッジ検出フラグxvtdを「0」にリセットする。このような処理を繰り返して、正常カウンタcvtdnorml のカウント値が正常判定回数しきい値KJDGEOK を越えた時点で、方向信号VTDが正常であると判定して正常判定フラグを「1」にセットし、異常判定フラグを「0」に維持又はリセットする。
以上説明した本実施例1の異常診断処理は、ECU22によって図4、図6、図8の各ルーチンに従って実行される。以下、各ルーチンの処理内容を説明する。
図4の位置信号異常診断ルーチンは、所定の診断処理周期(例えば40ms周期)で繰り返し実行され、特許請求の範囲でいう異常診断手段として役割を果たす。本ルーチンが起動されると、まずステップ101で、異常診断が許可されているか否かを、異常診断許可フラグxjdge が「1」であるか否かで判定する。この異常診断許可フラグxjdge は、後述する図8の異常診断許可/禁止判定ルーチンによってセット/リセットされる。このステップ101で、異常診断が禁止されている(異常診断許可フラグxjdge =0)と判定されれば、以降の処理を行わずに本ルーチンを終了する。
図6の方向信号異常診断ルーチンは、所定の診断処理周期(例えば40ms周期)で繰り返し実行され、特許請求の範囲でいう異常診断手段として役割を果たす。本ルーチンが起動されると、まずステップ201で、異常診断が許可されているか否かを、異常診断許可フラグxjdge が「1」であるか否かで判定する。この異常診断許可フラグxjdge は、後述する図8の異常診断許可/禁止判定ルーチンによってセット/リセットされる。このステップ201で、異常診断が禁止されている(異常診断許可フラグxjdge =0)と判定されれば、以降の処理を行わずに本ルーチンを終了する。
図8の異常診断許可/禁止判定ルーチンは、所定の診断処理周期(例えば40ms周期)で繰り返し実行され、特許請求の範囲でいう異常診断手段として役割を果たす。本ルーチンが起動されると、まずステップ201で、現在のカム軸位相(実進角値)vvtaと、本ルーチンの前回終了時に取り込んだカム軸位相vvtaold との差を求め、この差を本ルーチンの処理周期である40ms(0.04)で除算した値vvtadev を求める。
vvtadev =(vvta−vvtaold )/0.04
この値vvtadev は、カム軸位相の1秒当たりの変化量、すなわちカム軸位相の変化速度となる。
nedev =vvtadev ×k
revmotor=ne+nedev
上述したステップ301〜303の処理は、特許請求の範囲でいうモータ回転速度推定手段として機能する。
その他、本発明は、異常診断方法を適宜変更しても良い等、要旨を逸脱しない範囲内で種々変更して実施できる。
Claims (3)
- 内燃機関のクランク軸の回転速度の1/2の回転速度に対してモータの回転速度を調整することで該クランク軸に対するカム軸の回転位相(以下「カム軸位相」という)を変化させて吸気側又は排気側のバルブタイミングを変化させる可変バルブタイミング装置と、前記モータの回転位置に応じた位置信号及び/又は該モータの回転方向に応じた方向信号を周期的に出力するモータ回転状態検出系と、前記モータ回転状態検出系の異常診断処理を周期的に実行する異常診断手段とを備えた可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置において、
モータ回転速度を推定するモータ回転速度推定手段を備え、
前記異常診断手段は、前記モータ回転速度推定手段で推定したモータ回転速度が所定範囲内にあるときに前記モータ回転状態検出系の異常診断を禁止又は診断結果を無効とする手段を有することを特徴とする可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置。 - 前記モータ回転速度推定手段は、前記カム軸位相の変化速度及び内燃機関回転速度に基づいてモータ回転速度を推定することを特徴とする請求項1に記載の可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置。
- 内燃機関のクランク軸の回転速度の1/2の回転速度に対してモータの回転速度を調整することで該クランク軸に対するカム軸の回転位相(以下「カム軸位相」という)を変化させて吸気側又は排気側のバルブタイミングを変化させる可変バルブタイミング装置と、前記モータの回転位置に応じた位置信号及び/又は該モータの回転方向に応じた方向信号を周期的に出力するモータ回転状態検出系と、前記モータ回転状態検出系の異常診断処理を周期的に実行する異常診断手段とを備えた可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置において、
前記異常診断手段は、前記カム軸位相が遅角側に変化しているときに前記モータ回転状態検出系の異常診断を禁止又は診断結果を無効とする手段を有することを特徴とする可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011001926A JP5573687B2 (ja) | 2011-01-07 | 2011-01-07 | 可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011001926A JP5573687B2 (ja) | 2011-01-07 | 2011-01-07 | 可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012144993A true JP2012144993A (ja) | 2012-08-02 |
| JP5573687B2 JP5573687B2 (ja) | 2014-08-20 |
Family
ID=46788819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011001926A Expired - Fee Related JP5573687B2 (ja) | 2011-01-07 | 2011-01-07 | 可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5573687B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105339608A (zh) * | 2013-07-10 | 2016-02-17 | 博格华纳公司 | 用于电相位器的致动器轴的位置控制和校准方法 |
| CN106788123A (zh) * | 2016-12-05 | 2017-05-31 | 潍柴动力股份有限公司 | 一种电机转速调节方法和装置 |
| JP2017536077A (ja) * | 2014-11-20 | 2017-11-30 | エムエムティー エスアー | トルク信号および電力信号の明確なステアリングによって駆動されるメカトロニックユニット |
| WO2020162308A1 (ja) * | 2019-02-07 | 2020-08-13 | 日立オートモティブシステムズ株式会社 | 可変バルブタイミング装置の制御装置及び制御方法 |
| WO2021002252A1 (ja) * | 2019-07-03 | 2021-01-07 | 日立オートモティブシステムズ株式会社 | 可変バルブタイミング機構の制御装置及びその制御方法 |
| WO2021033691A1 (ja) * | 2019-08-22 | 2021-02-25 | 株式会社デンソー | バルブタイミング調整装置 |
| JP2021110262A (ja) * | 2020-01-07 | 2021-08-02 | トヨタ自動車株式会社 | 電動可変動弁機構の制御装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0988643A (ja) * | 1995-09-28 | 1997-03-31 | Nissan Motor Co Ltd | 可変バルブタイミング装置の診断装置 |
| JP2000073794A (ja) * | 1998-08-27 | 2000-03-07 | Denso Corp | 内燃機関の可変バルブ機構制御装置 |
| JP2004190663A (ja) * | 2002-11-28 | 2004-07-08 | Denso Corp | 内燃機関の可変バルブタイミング制御装置 |
| JP2007170342A (ja) * | 2005-12-26 | 2007-07-05 | Toyota Motor Corp | 可変動弁機構の異常検出装置 |
| JP2009185786A (ja) * | 2008-02-08 | 2009-08-20 | Denso Corp | バルブタイミング調整装置 |
| JP2010259260A (ja) * | 2009-04-27 | 2010-11-11 | Toyota Motor Corp | モータ制御システムの異常判定装置 |
-
2011
- 2011-01-07 JP JP2011001926A patent/JP5573687B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0988643A (ja) * | 1995-09-28 | 1997-03-31 | Nissan Motor Co Ltd | 可変バルブタイミング装置の診断装置 |
| JP2000073794A (ja) * | 1998-08-27 | 2000-03-07 | Denso Corp | 内燃機関の可変バルブ機構制御装置 |
| JP2004190663A (ja) * | 2002-11-28 | 2004-07-08 | Denso Corp | 内燃機関の可変バルブタイミング制御装置 |
| JP2007170342A (ja) * | 2005-12-26 | 2007-07-05 | Toyota Motor Corp | 可変動弁機構の異常検出装置 |
| JP2009185786A (ja) * | 2008-02-08 | 2009-08-20 | Denso Corp | バルブタイミング調整装置 |
| JP2010259260A (ja) * | 2009-04-27 | 2010-11-11 | Toyota Motor Corp | モータ制御システムの異常判定装置 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105339608A (zh) * | 2013-07-10 | 2016-02-17 | 博格华纳公司 | 用于电相位器的致动器轴的位置控制和校准方法 |
| JP2016526642A (ja) * | 2013-07-10 | 2016-09-05 | ボーグワーナー インコーポレーテッド | 電気フェイザー用アクチュエータシャフトの位置制御及び較正方法 |
| CN105339608B (zh) * | 2013-07-10 | 2019-01-01 | 博格华纳公司 | 用于电相位器的致动器轴的位置控制和校准方法 |
| JP2017536077A (ja) * | 2014-11-20 | 2017-11-30 | エムエムティー エスアー | トルク信号および電力信号の明確なステアリングによって駆動されるメカトロニックユニット |
| CN106788123A (zh) * | 2016-12-05 | 2017-05-31 | 潍柴动力股份有限公司 | 一种电机转速调节方法和装置 |
| JP2020128703A (ja) * | 2019-02-07 | 2020-08-27 | 日立オートモティブシステムズ株式会社 | 可変バルブタイミング装置の制御装置及び制御方法 |
| WO2020162308A1 (ja) * | 2019-02-07 | 2020-08-13 | 日立オートモティブシステムズ株式会社 | 可変バルブタイミング装置の制御装置及び制御方法 |
| JP7064454B2 (ja) | 2019-02-07 | 2022-05-10 | 日立Astemo株式会社 | 可変バルブタイミング装置の制御装置及び制御方法 |
| WO2021002252A1 (ja) * | 2019-07-03 | 2021-01-07 | 日立オートモティブシステムズ株式会社 | 可変バルブタイミング機構の制御装置及びその制御方法 |
| JP2021011820A (ja) * | 2019-07-03 | 2021-02-04 | 日立オートモティブシステムズ株式会社 | 可変バルブタイミング機構の制御装置及びその制御方法 |
| WO2021033691A1 (ja) * | 2019-08-22 | 2021-02-25 | 株式会社デンソー | バルブタイミング調整装置 |
| JP2021032103A (ja) * | 2019-08-22 | 2021-03-01 | 株式会社デンソー | バルブタイミング調整装置 |
| JP7211302B2 (ja) | 2019-08-22 | 2023-01-24 | 株式会社デンソー | バルブタイミング調整装置 |
| JP2021110262A (ja) * | 2020-01-07 | 2021-08-02 | トヨタ自動車株式会社 | 電動可変動弁機構の制御装置 |
| JP7247900B2 (ja) | 2020-01-07 | 2023-03-29 | トヨタ自動車株式会社 | 電動可変動弁機構の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5573687B2 (ja) | 2014-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5573687B2 (ja) | 可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置 | |
| JP4196294B2 (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| JP5010659B2 (ja) | クランク角検出システムの異常診断装置 | |
| US10920626B2 (en) | Electric phaser startup control method | |
| JP4591842B2 (ja) | 電動式可変バルブタイミング装置の制御装置 | |
| CN107849993B (zh) | 用于确定车辆发动机的凸轮轴的旋转状态的方法 | |
| WO2011078130A1 (ja) | 回転センサの異常判定装置 | |
| JP5402984B2 (ja) | 可変バルブタイミング制御装置 | |
| EP2990283A1 (en) | Startup control device | |
| US10767552B2 (en) | Control apparatus and control method for variable valve timing mechanism | |
| CN101135272A (zh) | 用于内燃机的可变阀正时控制器 | |
| CN101128664A (zh) | 用于控制内燃机的设备和方法 | |
| JP2005256842A (ja) | 内燃機関のクランクシャフトの角度位置を決定する方法および装置 | |
| JP4596481B2 (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| US9777605B2 (en) | Motor control apparatus | |
| JP5370162B2 (ja) | 可変バルブタイミング制御装置 | |
| JP6390578B2 (ja) | 可変バルブタイミング装置 | |
| JP4868022B2 (ja) | モータ制御システムの異常判定装置 | |
| JP2011094581A (ja) | 電動式可変バルブタイミング装置の制御装置 | |
| JP6038743B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP2012073054A (ja) | 回転検出装置 | |
| JP2018066331A (ja) | 制御装置 | |
| JP6394447B2 (ja) | クランク角検出装置 | |
| WO2016152068A1 (ja) | 可変バルブシステム | |
| JP3963054B2 (ja) | 回転信号の異常検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131010 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131017 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140616 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5573687 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |