JP2011199936A - リニアモータおよびその電機子構造 - Google Patents
リニアモータおよびその電機子構造 Download PDFInfo
- Publication number
- JP2011199936A JP2011199936A JP2010060931A JP2010060931A JP2011199936A JP 2011199936 A JP2011199936 A JP 2011199936A JP 2010060931 A JP2010060931 A JP 2010060931A JP 2010060931 A JP2010060931 A JP 2010060931A JP 2011199936 A JP2011199936 A JP 2011199936A
- Authority
- JP
- Japan
- Prior art keywords
- armature
- tooth
- width dimension
- root
- teeth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/16—Stator cores with slots for windings
- H02K1/165—Shape, form or location of the slots
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Linear Motors (AREA)
Abstract
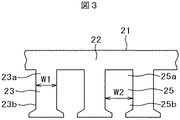
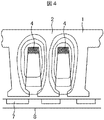
【解決手段】複数の永久磁石を並べて配置した磁極と、上記永久磁石列と磁気的空間を介して対向すると共に、対向面に複数のスロットとティースを有する電機子に電機子コイルを巻装した電機子とを備え、上記磁極と上記電機子との何れか一方を固定子に、他方を可動子として、上記磁極と上記電機子を相対的に走行するようにしたリニアモータにおいて、上記電機子の上記ティース幅寸法がティース先端から付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加している。
【選択図】図1
Description
上記電機子の上記ティース幅寸法がティース先端から付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加していることを特徴とする。
上記電機子の上記ティース幅寸法がティース先端から付根部に向い所定の長さ区間一定であり、上記区間からティース付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加していることを特徴とする。
Claims (8)
- 複数の永久磁石を並べて配置した磁極と、上記永久磁石列と磁気的空間を介して対向すると共に、対向面に複数のスロットとティースを有する電機子に電機子コイルを巻装した電機子とを備え、上記磁極と上記電機子との何れか一方を固定子に、他方を可動子として、上記磁極と上記電機子を相対的に走行するようにしたリニアモータにおいて、
上記電機子の上記ティース幅寸法がティース先端から付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加していることを特徴とするリニアモータ。 - 請求項1記載のリニアモータにおいて、上記電機子に巻装される電機子コイルの巻回数が、ティース先端側よりティース付根部側で少なく設定されたことを特徴とするリニアモータ。
- 複数の永久磁石を並べて配置した磁極と、上記永久磁石列と磁気的空間を介して対向すると共に、対向面に複数のスロットとティースを有する電機子に電機子コイルを巻装した電機子とを備え、上記磁極と上記電機子との何れか一方を固定子に、他方を可動子として、上記磁極と上記電機子を相対的に走行するようにしたリニアモータにおいて、
上記電機子の上記ティース幅寸法がティース先端から付根部に向い所定の長さ区間一定であり、上記区間からティース付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加していることを特徴とするリニアモータ。 - 請求項3記載のリニアモータにおいて、上記電機子に巻装される電機子コイルの巻回数が、ティース先端側よりティース付根部側で少なく設定されたことを特徴とするリニアモータ。
- 複数の永久磁石を並べて配置した磁極と、上記永久磁石列と磁気的空間を介して対向すると共に、対向面に複数のスロットとティースを有する電機子に電機子コイルを巻装した電機子とを備え、上記磁極と上記電機子との何れか一方を固定子に、他方を可動子として、上記磁極と上記電機子を相対的に走行するようにしたリニアモータの電機子構造において、
上記電機子の上記ティース幅寸法がティース先端から付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加していることを特徴とする電機子構造。 - 請求項5記載の電機子構造において、上記電機子に巻装される電機子コイルの巻回数が、ティース先端側よりティース付根部側で少なく設定されたことを特徴とする電機子構造。
- 複数の永久磁石を並べて配置した磁極と、上記永久磁石列と磁気的空間を介して対向すると共に、対向面に複数のスロットとティースを有する電機子に電機子コイルを巻装した電機子とを備え、上記磁極と上記電機子との何れか一方を固定子に、他方を可動子として、上記磁極と上記電機子を相対的に走行するようにしたリニアモータの電機子構造において、
上記電機子の上記ティース幅寸法がティース先端から付根部に向い所定の長さ区間一定であり、上記区間からティース付根部に向い漸次増加し、ティースとスロットとの幅寸法の比率(ティース幅寸法/スロットとの幅寸法)がティース先端から付根部に向い漸次増加していることを特徴とする電機子構造。 - 請求項7記載の電機子構造において、上記電機子に巻装される電機子コイルの巻回数が、ティース先端側よりティース付根部側で少なく設定されたことを特徴とする電機子構造。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010060931A JP5452299B2 (ja) | 2010-03-17 | 2010-03-17 | リニアモータおよびその電機子構造 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010060931A JP5452299B2 (ja) | 2010-03-17 | 2010-03-17 | リニアモータおよびその電機子構造 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011199936A true JP2011199936A (ja) | 2011-10-06 |
| JP5452299B2 JP5452299B2 (ja) | 2014-03-26 |
Family
ID=44877460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010060931A Expired - Fee Related JP5452299B2 (ja) | 2010-03-17 | 2010-03-17 | リニアモータおよびその電機子構造 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5452299B2 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014020695A1 (ja) * | 2012-07-31 | 2014-02-06 | 株式会社安川電機 | リニアモータ |
| JP2014166131A (ja) * | 2013-02-26 | 2014-09-08 | Toru Nagaike | 推力モーター及び移動体への取り付け方法 |
| CN107565716A (zh) * | 2016-06-30 | 2018-01-09 | 罗伯特·博世有限公司 | 绕组载体 |
| WO2019202919A1 (ja) * | 2018-04-17 | 2019-10-24 | Kyb株式会社 | 筒型リニアモータ |
| JP2020142912A (ja) * | 2019-03-08 | 2020-09-10 | 株式会社日立ハイテク | 搬送装置、およびそれを備えた検体分析システム、検体前処理装置 |
| JP2020201167A (ja) * | 2019-06-12 | 2020-12-17 | 株式会社日立ハイテク | 搬送装置 |
| EP3637600A4 (en) * | 2017-11-24 | 2021-03-03 | KYB Corporation | TUBULAR LINEAR MOTOR |
| WO2021166338A1 (ja) * | 2020-02-18 | 2021-08-26 | 株式会社日立ハイテク | 搬送装置及び搬送装置を有する検体分析システム |
| CN115622301A (zh) * | 2022-10-26 | 2023-01-17 | 浙江大学 | 动子可自供电的双励磁源永磁直线电机及其优化设置方法 |
| WO2023135893A1 (ja) * | 2022-01-14 | 2023-07-20 | 日立Astemo株式会社 | リニアモータ及びこれを備えた電動サスペンション装置、制振システム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022070419A (ja) * | 2020-10-27 | 2022-05-13 | 株式会社日立ハイテク | 搬送装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11155277A (ja) * | 1997-11-25 | 1999-06-08 | Nippon Otis Elevator Co | リニアモータ |
| JP2007143398A (ja) * | 2007-02-26 | 2007-06-07 | Nsk Ltd | リニアモータ |
-
2010
- 2010-03-17 JP JP2010060931A patent/JP5452299B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11155277A (ja) * | 1997-11-25 | 1999-06-08 | Nippon Otis Elevator Co | リニアモータ |
| JP2007143398A (ja) * | 2007-02-26 | 2007-06-07 | Nsk Ltd | リニアモータ |
Cited By (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5472489B1 (ja) * | 2012-07-31 | 2014-04-16 | 株式会社安川電機 | リニアモータ |
| WO2014020695A1 (ja) * | 2012-07-31 | 2014-02-06 | 株式会社安川電機 | リニアモータ |
| JP2014166131A (ja) * | 2013-02-26 | 2014-09-08 | Toru Nagaike | 推力モーター及び移動体への取り付け方法 |
| CN107565716A (zh) * | 2016-06-30 | 2018-01-09 | 罗伯特·博世有限公司 | 绕组载体 |
| EP3637600A4 (en) * | 2017-11-24 | 2021-03-03 | KYB Corporation | TUBULAR LINEAR MOTOR |
| US11456654B2 (en) | 2017-11-24 | 2022-09-27 | Kyb Corporation | Tubular linear motor |
| WO2019202919A1 (ja) * | 2018-04-17 | 2019-10-24 | Kyb株式会社 | 筒型リニアモータ |
| JP2019187209A (ja) * | 2018-04-17 | 2019-10-24 | Kyb株式会社 | 筒型リニアモータ |
| JP7079444B2 (ja) | 2018-04-17 | 2022-06-02 | Kyb株式会社 | 筒型リニアモータ |
| WO2020183889A1 (ja) * | 2019-03-08 | 2020-09-17 | 株式会社日立ハイテク | 搬送装置、およびそれを備えた検体分析システム、検体前処理装置 |
| JP2020142912A (ja) * | 2019-03-08 | 2020-09-10 | 株式会社日立ハイテク | 搬送装置、およびそれを備えた検体分析システム、検体前処理装置 |
| CN113474980A (zh) * | 2019-03-08 | 2021-10-01 | 株式会社日立高新技术 | 输送装置和具有它的受检体分析系统、受检体前处理装置 |
| JP2020201167A (ja) * | 2019-06-12 | 2020-12-17 | 株式会社日立ハイテク | 搬送装置 |
| WO2020250555A1 (ja) * | 2019-06-12 | 2020-12-17 | 株式会社日立ハイテク | 搬送装置 |
| US11772911B2 (en) | 2019-06-12 | 2023-10-03 | Hitachi High-Tech Corporation | Conveying device |
| CN113905964A (zh) * | 2019-06-12 | 2022-01-07 | 株式会社日立高新技术 | 输送装置 |
| JP7319096B2 (ja) | 2019-06-12 | 2023-08-01 | 株式会社日立ハイテク | 搬送装置 |
| JP2021130519A (ja) * | 2020-02-18 | 2021-09-09 | 株式会社日立ハイテク | 搬送装置及び搬送装置を有する検体分析システム |
| JP7304831B2 (ja) | 2020-02-18 | 2023-07-07 | 株式会社日立ハイテク | 搬送装置及び搬送装置を有する検体分析システム |
| CN115023405B (zh) * | 2020-02-18 | 2023-07-07 | 株式会社日立高新技术 | 搬送装置及具有搬送装置的检体分析系统 |
| CN115023405A (zh) * | 2020-02-18 | 2022-09-06 | 株式会社日立高新技术 | 搬送装置及具有搬送装置的检体分析系统 |
| WO2021166338A1 (ja) * | 2020-02-18 | 2021-08-26 | 株式会社日立ハイテク | 搬送装置及び搬送装置を有する検体分析システム |
| US11933801B2 (en) | 2020-02-18 | 2024-03-19 | Hitachi High-Tech Corporation | Transport device and specimen analysis system including transport device |
| WO2023135893A1 (ja) * | 2022-01-14 | 2023-07-20 | 日立Astemo株式会社 | リニアモータ及びこれを備えた電動サスペンション装置、制振システム |
| CN115622301A (zh) * | 2022-10-26 | 2023-01-17 | 浙江大学 | 动子可自供电的双励磁源永磁直线电机及其优化设置方法 |
| CN115622301B (zh) * | 2022-10-26 | 2023-08-04 | 浙江大学 | 动子可自供电的双励磁源永磁直线电机及其优化设置方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5452299B2 (ja) | 2014-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5452299B2 (ja) | リニアモータおよびその電機子構造 | |
| JP5370313B2 (ja) | リニアモータ | |
| JP6125267B2 (ja) | 埋込磁石型誘導子リニアモータ | |
| CN102195431B (zh) | 永久磁铁同步电动机 | |
| JP4458238B2 (ja) | 永久磁石型同期リニアモータ | |
| US8884473B2 (en) | Mover, armature, and linear motor | |
| JP2010130871A (ja) | リニアモータ | |
| TW201212490A (en) | Linear motor | |
| CN104052238A (zh) | 一种双边初级永磁游标直线电机 | |
| JP5511713B2 (ja) | リニアモータ | |
| CN109149800A (zh) | 一种9n/10n极分段转子开关磁阻电机 | |
| KR20190112153A (ko) | 리니어 모터 | |
| JP5678025B2 (ja) | 推力発生機構 | |
| JP2018050430A (ja) | リニアモータ | |
| JP5525416B2 (ja) | リニアアクチュエータ | |
| JP2010098880A (ja) | 円筒形リニアモータ | |
| CN101005217B (zh) | 自励磁电机及其定子结构 | |
| JP7466475B2 (ja) | リニアモータ | |
| JP2010148167A (ja) | リニアモータ | |
| JP5874246B2 (ja) | リニア駆動装置の可動子 | |
| CN216056755U (zh) | 永磁体内嵌式直线电机 | |
| JPH0628502B2 (ja) | リニアモ−タ | |
| US11245321B2 (en) | Cylindrical linear motor | |
| JP2007209175A (ja) | 三相リニアモータ | |
| Goto et al. | A new linear actuator utilizing flux concentration type permanent magnet arrangement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20110916 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120517 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130903 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5452299 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |