JP2010276367A - 加速度角速度センサ - Google Patents
加速度角速度センサ Download PDFInfo
- Publication number
- JP2010276367A JP2010276367A JP2009126595A JP2009126595A JP2010276367A JP 2010276367 A JP2010276367 A JP 2010276367A JP 2009126595 A JP2009126595 A JP 2009126595A JP 2009126595 A JP2009126595 A JP 2009126595A JP 2010276367 A JP2010276367 A JP 2010276367A
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- spring
- acceleration
- movable electrode
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/14—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of gyroscopes
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
Abstract
【解決手段】対をなす、第1固定電極、第1可動電極、錘部、及び該錘部が設けられ、第1可動電極を支持する第1支持部を有する加速度検出部と、対をなす、第2固定電極、第2可動電極、及び該第2可動電極を支持する第2支持部を有する角速度検出部と、対をなす第1支持部をX方向に逆位相で加振し、対をなす第2支持部をX方向に逆位相で加振する加振部と、を備え、第1支持部間は、Y方向に変位可能な第1バネによって互いに連結され、第1支持部はX方向及びY方向に変位可能な第2バネによって基台に連結され、第2支持部の1つはX方向及びY方向に変位可能な第3バネによって第1支持部の1つと連結され、第2支持部と第2可動電極とは、Y方向に変位可能な第4バネによって連結されている。
【選択図】図1
Description
(第1実施形態)
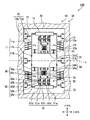
図1は、第1実施形態に係る加速度角速度センサの概略構成を示す平面図である。なお、本実施形態では、図1に示すように、加速度検出部10と角速度検出部30の振動方向をX方向、該X方向に対して垂直であり、慣性力の印加方向をY方向と示す。また、X方向及びY方向に垂直な方向をZ方向と示す。
11・・・第1駆動フレーム
11a,11b・・・第1支持部
12・・・第1可動電極
13・・・第1固定電極
30・・・角速度センサ
31・・・第2駆動フレーム
31a,31b・・・第2支持部
34・・・第2可動電極
35・・・第2固定電極
50・・・加振部
70・・・基台
100・・・加速度角速度センサ
Claims (11)
- 対をなす、第1固定電極、第1可動電極、錘部、及び該錘部が設けられ、前記第1可動電極を支持する第1支持部を有する加速度検出部と、
対をなす、第2固定電極、第2可動電極、及び該第2可動電極を支持する第2支持部を有する角速度検出部と、
対をなす前記第1支持部をX方向に逆位相で加振し、対をなす前記第2支持部をX方向に逆位相で加振する加振部と、を備え、
前記第1支持部間は、X方向に対して垂直な方向であるY方向に変位可能な第1バネによって互いに連結され、
前記第1支持部それぞれは、X方向、及びY方向に変位可能な第2バネによって基台に連結され、
前記第2支持部の1つは、X方向、及びY方向に変位可能な第3バネによって、前記第1支持部の1つと連結され、
前記第2支持部と前記第2可動電極とは、Y方向に変位可能な第4バネによって連結されていることを特徴とする加速度角速度センサ。 - 対をなす、第1固定電極、第1可動電極、及び該第1可動電極を支持する第1支持部を有する加速度検出部と、
対をなす、第2固定電極、第2可動電極、及び該第2可動電極を支持する第2支持部を有する角速度検出部と、
対をなす前記第1支持部をX方向に逆位相で加振し、対をなす前記第2支持部をX方向に逆位相で加振する加振部と、を備え、
前記第1支持部間は、X方向に変位可能な第1バネによって互いに連結され、
前記第1支持部それぞれは、X方向、及びX方向に対して垂直な方向であるY方向に変位可能な第1バネによって基台に連結され、
前記第2支持部の1つは、X方向、及びY方向に変位可能な第3バネによって、前記第1支持部の1つと連結され、
前記第2支持部と前記第2可動電極とは、Y方向に変位可能な第4バネによって連結され、
前記第2支持部間は、X方向に変位可能な第5バネによって互いに連結されていることを特徴とする加速度角速度センサ。 - 慣性力による、前記第1固定電極と、前記第1可動電極とによって構成される第1コンデンサの静電容量変化に基づいて加速度を検出し、
慣性力による、前記第2固定電極と、前記第2可動電極とによって構成される第2コンデンサの静電容量変化に基づいて角速度を検出することを特徴とする請求項1又は請求項2に記載の加速度角速度センサ。 - 前記第1固定電極、及び前記第1可動電極の形状は、櫛歯状であることを特徴とする請求項1〜3いずれか1項に記載の加速度角速度センサ。
- 前記第2固定電極、及び前記第2可動電極の形状は、櫛歯状であることを特徴とする請求項1〜4いずれか1項に記載の加速度角速度センサ。
- 前記加振部は、静電気力によって、対をなす前記第1支持部をX方向に逆位相で加振し、対をなす前記第2支持部をX方向に逆位相で加振することを特徴とする請求項1〜5いずれか1項に記載の加速度角速度センサ。
- 前記加振部は、櫛歯電極を有することを特徴とする請求項6に記載の加速度角速度センサ。
- 前記加振部は、電磁力によって、対をなす前記第1支持部をX方向に逆位相で加振し、対をなす前記第2支持部をX方向に逆位相で加振することを特徴とする請求項1〜5いずれか1項に記載の加速度角速度センサ。
- 前記加速度検出部、前記角速度検出部、及び前記加振部が、1つの半導体基板に集積されていることを特徴とする請求項1〜8いずれか1項に記載の加速度角速度センサ。
- 前記第1支持部は、コの字状であることを特徴とする請求項1〜9いずれか1項に記載の加速度角速度センサ。
- 前記第2支持部は、枠形状であることを特徴とする請求項1〜10いずれか1項に記載の加速度角速度センサ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009126595A JP4868027B2 (ja) | 2009-05-26 | 2009-05-26 | 加速度角速度センサ |
| US12/781,852 US8567248B2 (en) | 2009-05-26 | 2010-05-18 | Sensor for detecting acceleration and angular velocity |
| US13/772,638 US8621928B2 (en) | 2009-05-26 | 2013-02-21 | Sensor for detecting acceleration and angular velocity |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009126595A JP4868027B2 (ja) | 2009-05-26 | 2009-05-26 | 加速度角速度センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010276367A true JP2010276367A (ja) | 2010-12-09 |
| JP4868027B2 JP4868027B2 (ja) | 2012-02-01 |
Family
ID=43218694
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009126595A Expired - Fee Related JP4868027B2 (ja) | 2009-05-26 | 2009-05-26 | 加速度角速度センサ |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US8567248B2 (ja) |
| JP (1) | JP4868027B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012173055A (ja) * | 2011-02-18 | 2012-09-10 | Seiko Epson Corp | 物理量センサー、電子機器 |
| WO2013094208A1 (ja) * | 2011-12-23 | 2013-06-27 | 株式会社デンソー | 振動型角速度センサ |
| WO2014030492A1 (ja) * | 2012-08-22 | 2014-02-27 | 日立オートモティブシステムズ株式会社 | 慣性力センサ |
| JP2015507176A (ja) * | 2011-12-06 | 2015-03-05 | サジェム デファンス セキュリテ | 平衡化mems型慣性角度センサ及びそのようなセンサを平衡化するための方法 |
| WO2017056222A1 (ja) * | 2015-09-30 | 2017-04-06 | 株式会社日立製作所 | ジャイロスコープ |
| WO2018003692A1 (ja) * | 2016-07-01 | 2018-01-04 | 株式会社デンソー | 物理量センサ |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4797075B2 (ja) * | 2009-02-12 | 2011-10-19 | 株式会社豊田中央研究所 | 静電容量式センサ装置 |
| FI124020B (fi) * | 2011-03-04 | 2014-02-14 | Murata Electronics Oy | Jousirakenne, resonaattori, resonaattorimatriisi ja anturi |
| JP5963567B2 (ja) * | 2012-06-26 | 2016-08-03 | 日立オートモティブシステムズ株式会社 | 慣性センサ |
| CN103913595B (zh) * | 2014-04-02 | 2016-05-18 | 清华大学 | 三轴集成硅微谐振式加速度计 |
| US9360496B2 (en) * | 2014-10-03 | 2016-06-07 | Freescale Semiconductor, Inc. | Three-axis microelectromechanical systems device with single proof mass |
| JP6372361B2 (ja) * | 2015-01-16 | 2018-08-15 | 株式会社デンソー | 複合センサ |
| ITUA20162172A1 (it) | 2016-03-31 | 2017-10-01 | St Microelectronics Srl | Sensore accelerometrico realizzato in tecnologia mems avente elevata accuratezza e ridotta sensibilita' nei confronti della temperatura e dell'invecchiamento |
| DE102016215975A1 (de) * | 2016-08-25 | 2018-03-01 | Robert Bosch Gmbh | Verfahren zum Betrieb eines mikromechanischen Bauelements |
| DE102017217975A1 (de) * | 2017-10-10 | 2019-04-11 | Robert Bosch Gmbh | Mikromechanische Federstruktur |
| CN111551761B (zh) * | 2020-04-03 | 2021-11-30 | 四川知微传感技术有限公司 | 一种低噪声mems加速度计 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004518971A (ja) * | 2001-02-21 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転レートセンサー |
| JP2004518970A (ja) * | 2001-02-21 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転レートセンサー |
| JP2004518969A (ja) * | 2001-02-21 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | ヨーレートセンサ |
| JP2007333467A (ja) * | 2006-06-13 | 2007-12-27 | Hitachi Ltd | 慣性センサ |
| JP2008014727A (ja) * | 2006-07-04 | 2008-01-24 | Toyota Motor Corp | 加速度角速度センサ |
| JP2008039614A (ja) * | 2006-08-07 | 2008-02-21 | Toyota Motor Corp | 加速度角速度センサ |
| WO2009037751A1 (ja) * | 2007-09-19 | 2009-03-26 | Murata Manufacturing Co., Ltd. | 複合センサおよび加速度センサ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3123301B2 (ja) | 1993-04-16 | 2001-01-09 | 株式会社村田製作所 | 角速度センサ |
| JP3329068B2 (ja) | 1994-04-28 | 2002-09-30 | 株式会社村田製作所 | 角速度センサ |
| JP2000074673A (ja) | 1998-08-27 | 2000-03-14 | Miyota Kk | 複合運動センサ |
| JP2000337884A (ja) | 1999-03-25 | 2000-12-08 | Murata Mfg Co Ltd | 角速度センサ |
| JP3659160B2 (ja) * | 2000-02-18 | 2005-06-15 | 株式会社デンソー | 角速度センサ |
| JP3870895B2 (ja) * | 2002-01-10 | 2007-01-24 | 株式会社村田製作所 | 角速度センサ |
| JP3985796B2 (ja) * | 2004-03-30 | 2007-10-03 | 株式会社デンソー | 力学量センサ装置 |
| JP2006105698A (ja) | 2004-10-01 | 2006-04-20 | Star Micronics Co Ltd | 加速度角速度複合センサ |
| US8187902B2 (en) * | 2008-07-09 | 2012-05-29 | The Charles Stark Draper Laboratory, Inc. | High performance sensors and methods for forming the same |
-
2009
- 2009-05-26 JP JP2009126595A patent/JP4868027B2/ja not_active Expired - Fee Related
-
2010
- 2010-05-18 US US12/781,852 patent/US8567248B2/en active Active
-
2013
- 2013-02-21 US US13/772,638 patent/US8621928B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004518971A (ja) * | 2001-02-21 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転レートセンサー |
| JP2004518970A (ja) * | 2001-02-21 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転レートセンサー |
| JP2004518969A (ja) * | 2001-02-21 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | ヨーレートセンサ |
| JP2007333467A (ja) * | 2006-06-13 | 2007-12-27 | Hitachi Ltd | 慣性センサ |
| JP2008014727A (ja) * | 2006-07-04 | 2008-01-24 | Toyota Motor Corp | 加速度角速度センサ |
| JP2008039614A (ja) * | 2006-08-07 | 2008-02-21 | Toyota Motor Corp | 加速度角速度センサ |
| WO2009037751A1 (ja) * | 2007-09-19 | 2009-03-26 | Murata Manufacturing Co., Ltd. | 複合センサおよび加速度センサ |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012173055A (ja) * | 2011-02-18 | 2012-09-10 | Seiko Epson Corp | 物理量センサー、電子機器 |
| US9273962B2 (en) | 2011-02-18 | 2016-03-01 | Seiko Epson Corporation | Physical quantity sensor and electronic device |
| JP2015507176A (ja) * | 2011-12-06 | 2015-03-05 | サジェム デファンス セキュリテ | 平衡化mems型慣性角度センサ及びそのようなセンサを平衡化するための方法 |
| JP2018004653A (ja) * | 2011-12-06 | 2018-01-11 | サフラン エレクトロニクス アンド ディフェンス | 平衡化mems型慣性角度センサ及びそのようなセンサを平衡化するための方法 |
| WO2013094208A1 (ja) * | 2011-12-23 | 2013-06-27 | 株式会社デンソー | 振動型角速度センサ |
| JP2013134064A (ja) * | 2011-12-23 | 2013-07-08 | Denso Corp | 振動型角速度センサ |
| WO2014030492A1 (ja) * | 2012-08-22 | 2014-02-27 | 日立オートモティブシステムズ株式会社 | 慣性力センサ |
| WO2017056222A1 (ja) * | 2015-09-30 | 2017-04-06 | 株式会社日立製作所 | ジャイロスコープ |
| WO2018003692A1 (ja) * | 2016-07-01 | 2018-01-04 | 株式会社デンソー | 物理量センサ |
| JP2018004451A (ja) * | 2016-07-01 | 2018-01-11 | 株式会社デンソー | 物理量センサ |
| CN109416254A (zh) * | 2016-07-01 | 2019-03-01 | 株式会社电装 | 物理量传感器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100300203A1 (en) | 2010-12-02 |
| US8621928B2 (en) | 2014-01-07 |
| US20130152684A1 (en) | 2013-06-20 |
| JP4868027B2 (ja) | 2012-02-01 |
| US8567248B2 (en) | 2013-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4868027B2 (ja) | 加速度角速度センサ | |
| KR100616641B1 (ko) | 튜닝포크형 진동식 mems 자이로스코프 | |
| JP5670357B2 (ja) | 角速度の振動微小機械センサ | |
| JP3785261B2 (ja) | マイクロアクチュエータの相補型静電駆動装置 | |
| JP5884603B2 (ja) | ロールオーバージャイロセンサ | |
| JP6176001B2 (ja) | ジャイロセンサ | |
| JP5772873B2 (ja) | 静電容量式物理量センサ | |
| US9476897B2 (en) | Physical quantity sensor | |
| JP2012519295A5 (ja) | ||
| JPWO2008032415A1 (ja) | 角速度センサ | |
| WO2011158348A1 (ja) | 複合センサ | |
| JP2008014727A (ja) | 加速度角速度センサ | |
| WO2017007428A1 (en) | Motion measurement devices and methods for measuring motion | |
| JP2013096801A (ja) | 出力安定性に優れた振動型ジャイロ | |
| JP5018337B2 (ja) | 音叉振動型センサ、力学量検出装置、及び力学量検出方法 | |
| JP4710926B2 (ja) | 角速度センサ | |
| JP4816273B2 (ja) | ジャイロセンサ | |
| JP2012202799A (ja) | バイアス安定性に優れた振動型ジャイロ | |
| JP4320934B2 (ja) | 半導体角速度センサ | |
| JP6256215B2 (ja) | 角速度センサ | |
| KR102502062B1 (ko) | 구동 및 검출 겸용 mems 요레이트 센서 | |
| JP2008039614A (ja) | 加速度角速度センサ | |
| WO2018092449A1 (ja) | ジャイロセンサ及び電子機器 | |
| JP3992006B2 (ja) | 振動型マイクロジャイロセンサ | |
| JP2006071335A (ja) | 角速度センサおよびその駆動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110802 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111018 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111031 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141125 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |