JP5670357B2 - 角速度の振動微小機械センサ - Google Patents
角速度の振動微小機械センサ Download PDFInfo
- Publication number
- JP5670357B2 JP5670357B2 JP2011552481A JP2011552481A JP5670357B2 JP 5670357 B2 JP5670357 B2 JP 5670357B2 JP 2011552481 A JP2011552481 A JP 2011552481A JP 2011552481 A JP2011552481 A JP 2011552481A JP 5670357 B2 JP5670357 B2 JP 5670357B2
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- excitation
- vibration
- structures
- micromechanical sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5733—Structural details or topology
- G01C19/574—Structural details or topology the devices having two sensing masses in anti-phase motion
- G01C19/5747—Structural details or topology the devices having two sensing masses in anti-phase motion each sensing mass being connected to a driving mass, e.g. driving frames
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
- B81B3/0018—Structures acting upon the moving or flexible element for transforming energy into mechanical movement or vice versa, i.e. actuators, sensors, generators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/02—Devices characterised by the use of mechanical means
- G01P3/14—Devices characterised by the use of mechanical means by exciting one or more mechanical resonance systems
Description
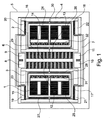
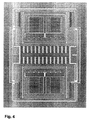
本発明による角速度の振動微小機械センサでは、一次運動は、対向する励起コーム構造12、13によって、共通モードの信号を用いて、静電的に励起され、それは、検出コーム構造によって差分的に検出される。
Claims (5)
- 角速度の振動微小機械センサであって、当該角速度の振動微小機械センサは、
複数の固定点(8〜11)を有し;
少なくとも2つの励起構造(3、4)を有し、それら励起構造は、前記固定点(8〜11)にそれぞれ接続された第一のバネ(6、7)に接続され、それにより、該励起構造は、該第一のバネによって支持されており;
少なくとも2つの振動質量構造(1、2)を有し、それら振動質量構造は、互いに離れて位置しており、かつ、複数の第二のバネ(27〜30)を介して、前記励起構造(3、4)にそれぞれに接続され、それにより、該振動質量構造は、該励起構造によってそれぞれに支持されており、
当該角速度の振動微小機械センサの特徴は、
前記第一のバネのうちの少なくとも1つが連結シーソータイプのバネであって、該連結シーソータイプのバネは、前記の少なくとも2つの励起構造(3、4)を固い支持構造で連結しており、該支持構造は、固定軸の周りにおいて表面の平面内で回転し得るように構成されており、該固定軸は前記表面の平面に対して直角をなす軸であり、これらの構成によって、前記少なくとも2つの励起構造は、前記表面の平面内における平行で互いに逆の位相の振動を行うものとなっており;
平行で互いに逆の位相の振動を行うものとなっている励起構造のうちの、1つの励起構造の動作の経路と、他の励起構造の動作の経路とが、前記表面の平面内において隣り合って並んだ2つの弧形または2つの線を形成するものとなっていることである、
前記角速度の振動微小機械センサ。 - 当該角速度の振動微小機械センサが、さらに、励起コーム構造(12、13)を有し、該励起コーム構造は、上記の少なくとも2つの振動質量構造(1、2)を有する上記の励起構造(3、4)の間に位置している、請求項1記載の角速度の振動微小機械センサ。
- 上記励起コーム構造(12、13)が、中央に位置する固定構造(14)に支持されている、請求項2記載の角速度の振動微小機械センサ。
- 当該角速度の振動微小機械センサが、さらに、直交運動補償コーム構造(31、32)を有し、該直交運動補償コーム構造は、上記の振動質量構造(1、2)のそれぞれの内部に位置している、請求項1から3のいずれか一項に記載の角速度の振動微小機械センサ。
- 当該角速度の振動微小機械センサが、さらに、検出コーム構造(23−26)を有し、該検出コーム構造(23−26)は、角速度によって生じるコリオリの力の二重差動検出のために配置されている、請求項1から4のいずれか一項に記載の角速度の振動微小機械センサ。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FI20095201A FI20095201A0 (fi) | 2009-03-02 | 2009-03-02 | Värähtelevä mikromekaaninen kulmanopeusanturi |
| FI20095201 | 2009-03-02 | ||
| FI20095903 | 2009-09-02 | ||
| FI20095903A FI122232B (fi) | 2009-03-02 | 2009-09-02 | Mikromekaaninen kulmanopeusanturi |
| PCT/FI2010/050160 WO2010100334A1 (en) | 2009-03-02 | 2010-03-01 | Vibrating micro-mechanical sensor of angular velocity |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012519295A JP2012519295A (ja) | 2012-08-23 |
| JP2012519295A5 JP2012519295A5 (ja) | 2014-08-07 |
| JP5670357B2 true JP5670357B2 (ja) | 2015-02-18 |
Family
ID=40510201
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011552481A Active JP5670357B2 (ja) | 2009-03-02 | 2010-03-01 | 角速度の振動微小機械センサ |
| JP2011552480A Active JP5670356B2 (ja) | 2009-03-02 | 2010-03-01 | 角速度の微小機械センサ |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011552480A Active JP5670356B2 (ja) | 2009-03-02 | 2010-03-01 | 角速度の微小機械センサ |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US8997565B2 (ja) |
| EP (2) | EP2404139B1 (ja) |
| JP (2) | JP5670357B2 (ja) |
| KR (2) | KR101676264B1 (ja) |
| CN (2) | CN102369414B (ja) |
| FI (2) | FI20095201A0 (ja) |
| IL (2) | IL214926A (ja) |
| TW (2) | TWI481817B (ja) |
| WO (2) | WO2010100334A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI119895B (fi) * | 2007-10-05 | 2009-04-30 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| FI20095201A0 (fi) * | 2009-03-02 | 2009-03-02 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| DE102010029630A1 (de) * | 2010-06-02 | 2011-12-08 | Robert Bosch Gmbh | Drehratensensor |
| FI124020B (fi) * | 2011-03-04 | 2014-02-14 | Murata Electronics Oy | Jousirakenne, resonaattori, resonaattorimatriisi ja anturi |
| US10914584B2 (en) | 2011-09-16 | 2021-02-09 | Invensense, Inc. | Drive and sense balanced, semi-coupled 3-axis gyroscope |
| US9863769B2 (en) | 2011-09-16 | 2018-01-09 | Invensense, Inc. | MEMS sensor with decoupled drive system |
| US8833162B2 (en) | 2011-09-16 | 2014-09-16 | Invensense, Inc. | Micromachined gyroscope including a guided mass system |
| US9170107B2 (en) | 2011-09-16 | 2015-10-27 | Invensense, Inc. | Micromachined gyroscope including a guided mass system |
| US9714842B2 (en) | 2011-09-16 | 2017-07-25 | Invensense, Inc. | Gyroscope self test by applying rotation on coriolis sense mass |
| TWI416070B (zh) | 2011-12-26 | 2013-11-21 | Ind Tech Res Inst | 陀螺儀的讀取電路 |
| DE102012200132A1 (de) * | 2012-01-05 | 2013-07-11 | Robert Bosch Gmbh | Drehratensensor und Verfahren zum Betrieb eines Drehratensensors |
| TWI649565B (zh) | 2012-01-12 | 2019-02-01 | 芬蘭商村田電子公司 | 加速度感測器結構和其之使用 |
| US9366690B2 (en) | 2012-01-12 | 2016-06-14 | Murata Electronics Oy | Vibration tolerant acceleration sensor structure |
| US8991250B2 (en) * | 2012-09-11 | 2015-03-31 | The United States Of America As Represented By Secretary Of The Navy | Tuning fork gyroscope time domain inertial sensor |
| DE102013206414A1 (de) | 2013-04-11 | 2014-10-16 | Robert Bosch Gmbh | Drehratensensor |
| FR3013445B1 (fr) * | 2013-11-20 | 2015-11-20 | Sagem Defense Securite | Capteur a element sensible mobile ayant un fonctionnement mixte vibrant et pendulaire, et procedes de commande d'un tel capteur |
| US9958271B2 (en) | 2014-01-21 | 2018-05-01 | Invensense, Inc. | Configuration to reduce non-linear motion |
| FI126071B (en) | 2014-01-28 | 2016-06-15 | Murata Manufacturing Co | Improved gyroscope structure and gyroscope |
| TWI580632B (zh) | 2014-03-14 | 2017-05-01 | 財團法人工業技術研究院 | 具用於旋轉元件之摺疊彈簧的微機電裝置 |
| DE102015213447A1 (de) * | 2015-07-17 | 2017-01-19 | Robert Bosch Gmbh | Drehratensensor mit minimierten Störbewegungen in der Antriebsmode |
| CN106871885A (zh) * | 2015-12-10 | 2017-06-20 | 上海矽睿科技有限公司 | 用于mems传感器的折叠弹簧组以及mems传感器 |
| KR101844595B1 (ko) | 2016-12-09 | 2018-04-03 | 한국철도기술연구원 | 철도차량용 공기압축기의 진동 테스트 장치와 이를 이용하여 균형추를 설계하는 방법 |
| US10466053B2 (en) * | 2017-04-04 | 2019-11-05 | Invensense, Inc. | Out-of-plane sensing gyroscope robust to external acceleration and rotation |
| TWI669267B (zh) | 2017-04-04 | 2019-08-21 | 日商村田製作所股份有限公司 | 用於角速度的微機械感測器元件 |
| JP6696530B2 (ja) * | 2017-05-24 | 2020-05-20 | 株式会社村田製作所 | 圧電ジャイロスコープにおける連結懸架 |
| JP6610706B2 (ja) * | 2017-05-24 | 2019-11-27 | 株式会社村田製作所 | 横駆動変換器を備える圧電ジャイロスコープ |
| CN108731659A (zh) * | 2018-05-25 | 2018-11-02 | 中国电子科技集团公司第二十九研究所 | 一种多检测振动单元微惯性导航陀螺仪 |
| JP6922961B2 (ja) * | 2018-10-18 | 2021-08-18 | 株式会社村田製作所 | 回転運動検出用微小電気機械デバイス |
| US11624613B2 (en) * | 2020-12-03 | 2023-04-11 | Murata Manufacturing Co., Ltd. | Synchronized four mass gyroscope |
Family Cites Families (64)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5002A (en) * | 1847-03-06 | Godlove k | ||
| US3015A (en) * | 1843-03-21 | Improvement in gilding, silvering | ||
| US3016A (en) * | 1843-03-21 | Burning bricks | ||
| US4025A (en) * | 1845-05-01 | Feinting press | ||
| US8028A (en) * | 1851-04-08 | Hokse-poweb | ||
| US10021A (en) * | 1853-09-13 | Screw-eastemtito- for boots and shoes | ||
| US5635638A (en) * | 1995-06-06 | 1997-06-03 | Analog Devices, Inc. | Coupling for multiple masses in a micromachined device |
| DE19530007C2 (de) * | 1995-08-16 | 1998-11-26 | Bosch Gmbh Robert | Drehratensensor |
| US5992233A (en) * | 1996-05-31 | 1999-11-30 | The Regents Of The University Of California | Micromachined Z-axis vibratory rate gyroscope |
| US6250156B1 (en) | 1996-05-31 | 2001-06-26 | The Regents Of The University Of California | Dual-mass micromachined vibratory rate gyroscope |
| US6122961A (en) | 1997-09-02 | 2000-09-26 | Analog Devices, Inc. | Micromachined gyros |
| US5920012A (en) * | 1998-06-16 | 1999-07-06 | Boeing North American | Micromechanical inertial sensor |
| JP3106395B2 (ja) * | 1998-07-10 | 2000-11-06 | 株式会社村田製作所 | 角速度センサ |
| JP2000131071A (ja) * | 1998-10-22 | 2000-05-12 | Hitachi Ltd | 回転角速度センサ |
| FR2798993B1 (fr) | 1999-09-28 | 2001-12-07 | Thomson Csf Sextant | Gyrometre de type diapason |
| KR100343211B1 (ko) * | 1999-11-04 | 2002-07-10 | 윤종용 | 웨이퍼 레벨 진공 패키징이 가능한 mems의 구조물의제작방법 |
| KR100374812B1 (ko) | 1999-11-04 | 2003-03-03 | 삼성전자주식회사 | 두개의 공진판을 가진 마이크로 자이로스코프 |
| FR2809174B1 (fr) * | 2000-05-16 | 2002-07-12 | Commissariat Energie Atomique | Structure vibrante a deux oscillateurs couples, notamment pour un gyrometre |
| JP3531918B2 (ja) * | 2000-07-12 | 2004-05-31 | キヤノン株式会社 | 光ジャイロ、及びその駆動方法並びに信号処理方法 |
| DE10108196A1 (de) | 2001-02-21 | 2002-10-24 | Bosch Gmbh Robert | Drehratensensor |
| DE10108197A1 (de) | 2001-02-21 | 2002-09-12 | Bosch Gmbh Robert | Drehratensensor |
| FR2834055B1 (fr) * | 2001-12-20 | 2004-02-13 | Thales Sa | Capteur inertiel micro-usine pour la mesure de mouvements de rotation |
| JP3870895B2 (ja) * | 2002-01-10 | 2007-01-24 | 株式会社村田製作所 | 角速度センサ |
| WO2003058167A1 (de) | 2002-01-12 | 2003-07-17 | Robert Bosch Gmbh | Drehratensensor |
| AU2003259814A1 (en) * | 2002-08-12 | 2004-02-25 | The Boeing Company | Isolated planar gyroscope with internal radial sensing and actuation |
| US6860151B2 (en) * | 2003-02-07 | 2005-03-01 | Honeywell International Inc. | Methods and systems for controlling movement within MEMS structures |
| US6978673B2 (en) * | 2003-02-07 | 2005-12-27 | Honeywell International, Inc. | Methods and systems for simultaneously fabricating multi-frequency MEMS devices |
| US6867543B2 (en) * | 2003-03-31 | 2005-03-15 | Motorola, Inc. | Microdevice assembly having a fine grain getter layer for maintaining vacuum |
| US6843127B1 (en) * | 2003-07-30 | 2005-01-18 | Motorola, Inc. | Flexible vibratory micro-electromechanical device |
| US7036372B2 (en) * | 2003-09-25 | 2006-05-02 | Kionix, Inc. | Z-axis angular rate sensor |
| JP4433747B2 (ja) * | 2003-09-29 | 2010-03-17 | 株式会社村田製作所 | 角速度検出装置 |
| FR2860865B1 (fr) * | 2003-10-10 | 2006-01-20 | Thales Sa | Gyrometre micromecanique infertiel a diapason |
| US6892575B2 (en) * | 2003-10-20 | 2005-05-17 | Invensense Inc. | X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging |
| DE10350037A1 (de) * | 2003-10-27 | 2005-05-25 | Robert Bosch Gmbh | Drehratensensor |
| DE10360963B4 (de) * | 2003-12-23 | 2007-05-16 | Litef Gmbh | Verfahren zur Messung von Drehraten/Beschleunigungen unter Verwendung eines Drehraten-Corioliskreisels sowie dafür geeigneter Corioliskreisel |
| US7043985B2 (en) * | 2004-01-13 | 2006-05-16 | Georgia Tech Research Corporation | High-resolution in-plane tuning fork gyroscope and methods of fabrication |
| EP1735590B1 (en) | 2004-04-14 | 2013-11-27 | Analog Devices, Inc. | Coupling apparatus for inertial sensors |
| KR100652952B1 (ko) | 2004-07-19 | 2006-12-06 | 삼성전자주식회사 | 커플링 스프링을 구비한 멤스 자이로스코프 |
| FR2874257B1 (fr) * | 2004-08-13 | 2006-10-13 | Commissariat Energie Atomique | Micro gyrometre a detection frenquentielle |
| JP2006105698A (ja) * | 2004-10-01 | 2006-04-20 | Star Micronics Co Ltd | 加速度角速度複合センサ |
| FR2876180B1 (fr) * | 2004-10-06 | 2006-12-08 | Commissariat Energie Atomique | Resonateur a masses oscillantes. |
| KR100616641B1 (ko) | 2004-12-03 | 2006-08-28 | 삼성전기주식회사 | 튜닝포크형 진동식 mems 자이로스코프 |
| FI116543B (fi) | 2004-12-31 | 2005-12-15 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| CN101180516B (zh) * | 2005-05-24 | 2011-09-14 | 独立行政法人宇宙航空研究开发机构 | 陀螺仪 |
| US7228738B2 (en) * | 2005-06-06 | 2007-06-12 | Bei Technologies, Inc. | Torsional rate sensor with momentum balance and mode decoupling |
| US7617728B2 (en) | 2006-05-17 | 2009-11-17 | Donato Cardarelli | Tuning fork gyroscope |
| FR2888318B1 (fr) * | 2005-07-05 | 2007-09-14 | Thales Sa | Capteur gyrometrique micro-usine realisant une mesure differentielle du mouvement des masses vibrantes |
| JP4887034B2 (ja) * | 2005-12-05 | 2012-02-29 | 日立オートモティブシステムズ株式会社 | 慣性センサ |
| FR2894661B1 (fr) * | 2005-12-13 | 2008-01-18 | Thales Sa | Gyrometre vibrant equilibre par un dispositif electrostatique |
| FR2895501B1 (fr) * | 2005-12-23 | 2008-02-29 | Commissariat Energie Atomique | Microsysteme, plus particulierement microgyrometre, avec au moins deux massesm oscillantes couplees mecaniquement |
| WO2007104742A1 (de) * | 2006-03-10 | 2007-09-20 | Continental Teves Ag & Co. Ohg | Drehratensensor mit kopplungsbalken |
| US8342022B2 (en) * | 2006-03-10 | 2013-01-01 | Conti Temic Microelectronic Gmbh | Micromechanical rotational speed sensor |
| US7444868B2 (en) * | 2006-06-29 | 2008-11-04 | Honeywell International Inc. | Force rebalancing for MEMS inertial sensors using time-varying voltages |
| FR2905457B1 (fr) * | 2006-09-01 | 2008-10-17 | Commissariat Energie Atomique | Microsysteme, plus particulierement microgyrometre, avec element de detection a electrodes capacitives. |
| JP4859649B2 (ja) * | 2006-12-12 | 2012-01-25 | 日立オートモティブシステムズ株式会社 | 角速度センサ |
| TWI317812B (en) | 2006-12-22 | 2009-12-01 | Delta Electronics Inc | Capacitance acceleration sensing structure |
| FI120921B (fi) | 2007-06-01 | 2010-04-30 | Vti Technologies Oy | Menetelmä kulmanopeuden mittaamiseksi ja värähtelevä mikromekaaninen kulmanopeusanturi |
| DE102007030120B4 (de) * | 2007-06-29 | 2010-04-08 | Litef Gmbh | Drehratensensor |
| US8061201B2 (en) | 2007-07-13 | 2011-11-22 | Georgia Tech Research Corporation | Readout method and electronic bandwidth control for a silicon in-plane tuning fork gyroscope |
| WO2009119470A1 (ja) * | 2008-03-24 | 2009-10-01 | アルプス電気株式会社 | 角速度センサ |
| JP5228675B2 (ja) * | 2008-07-29 | 2013-07-03 | 富士通株式会社 | 角速度センサおよび電子装置 |
| US8146424B2 (en) * | 2008-12-16 | 2012-04-03 | Honeywell International Inc. | Systems and methods for an inertial sensor suspension that minimizes proof mass rotation |
| FI20095201A0 (fi) * | 2009-03-02 | 2009-03-02 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| DE102010029630A1 (de) * | 2010-06-02 | 2011-12-08 | Robert Bosch Gmbh | Drehratensensor |
-
2009
- 2009-03-02 FI FI20095201A patent/FI20095201A0/fi not_active Application Discontinuation
- 2009-09-02 FI FI20095903A patent/FI122232B/fi active IP Right Grant
-
2010
- 2010-03-01 EP EP10748388.5A patent/EP2404139B1/en active Active
- 2010-03-01 EP EP10748387.7A patent/EP2404138B1/en active Active
- 2010-03-01 JP JP2011552481A patent/JP5670357B2/ja active Active
- 2010-03-01 WO PCT/FI2010/050160 patent/WO2010100334A1/en active Application Filing
- 2010-03-01 JP JP2011552480A patent/JP5670356B2/ja active Active
- 2010-03-01 CN CN201080015565.7A patent/CN102369414B/zh active Active
- 2010-03-01 KR KR1020117022831A patent/KR101676264B1/ko active IP Right Grant
- 2010-03-01 KR KR1020117022849A patent/KR101673887B1/ko active IP Right Grant
- 2010-03-01 CN CN201080014785.8A patent/CN102365524B/zh active Active
- 2010-03-01 WO PCT/FI2010/050159 patent/WO2010100333A1/en active Application Filing
- 2010-03-02 TW TW099106031A patent/TWI481817B/zh active
- 2010-03-02 US US12/715,803 patent/US8997565B2/en active Active
- 2010-03-02 TW TW099106035A patent/TWI481872B/zh active
- 2010-03-02 US US12/715,767 patent/US8904865B2/en active Active
-
2011
- 2011-09-01 IL IL214926A patent/IL214926A/en active IP Right Grant
- 2011-09-01 IL IL214925A patent/IL214925A0/en active IP Right Grant
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5670357B2 (ja) | 角速度の振動微小機械センサ | |
| JP2012519295A5 (ja) | ||
| JP5620903B2 (ja) | 振動型マイクロメカニカル角速度センサ | |
| JP4719751B2 (ja) | 角速度のための振動マイクロ−メカニカルセンサー | |
| KR101178692B1 (ko) | 코리올리 자이로스코프 | |
| US7454971B2 (en) | Oscillating micro-mechanical sensor of angular velocity | |
| JP4290986B2 (ja) | 回転レートセンサー | |
| KR101823325B1 (ko) | 개선된 자이로스코프 구조체 및 자이로스코프 | |
| JP2008542788A (ja) | 運動量平衡及びモード分離を有するねじれ速度センサ | |
| JP5884603B2 (ja) | ロールオーバージャイロセンサ | |
| JP2014130129A (ja) | ジャイロセンサ | |
| JP2020091280A (ja) | 回転運動検出用微小電気機械デバイス | |
| JP2008014727A (ja) | 加速度角速度センサ | |
| JP6527235B2 (ja) | ジャイロスコープ | |
| JP4710926B2 (ja) | 角速度センサ | |
| KR100319920B1 (ko) | 비대칭 내부 비틀림 짐벌을 가진 측면 구동 방식의 짐벌형 자이로스코프 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130508 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131217 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20140218 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140310 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140311 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140317 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140516 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140523 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140617 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20140617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5670357 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |