JP2010268564A - 超音波アクチュエータ - Google Patents
超音波アクチュエータ Download PDFInfo
- Publication number
- JP2010268564A JP2010268564A JP2009116556A JP2009116556A JP2010268564A JP 2010268564 A JP2010268564 A JP 2010268564A JP 2009116556 A JP2009116556 A JP 2009116556A JP 2009116556 A JP2009116556 A JP 2009116556A JP 2010268564 A JP2010268564 A JP 2010268564A
- Authority
- JP
- Japan
- Prior art keywords
- state
- detection
- piezoelectric vibrator
- protrusions
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 209
- 230000008859 change Effects 0.000 claims abstract description 22
- 238000006243 chemical reaction Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 13
- 239000000463 material Substances 0.000 description 11
- 238000000605 extraction Methods 0.000 description 10
- 238000005452 bending Methods 0.000 description 6
- 239000010410 layer Substances 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 230000003746 surface roughness Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- 229910001080 W alloy Inorganic materials 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000005121 nitriding Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- SWELZOZIOHGSPA-UHFFFAOYSA-N palladium silver Chemical compound [Pd].[Ag] SWELZOZIOHGSPA-UHFFFAOYSA-N 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 238000007650 screen-printing Methods 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images













Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【解決手段】超音波アクチュエータ100において、圧電振動子2bの振動状態は、移動体1が移動することにより、突起部のすべてが第1の領域に位置する駆動状態と、突起部の一部が前記第1の領域に位置し、突起部の残りの突起部が第2の領域に位置する検出状態とがあり、さらに、検出状態においては、第1の領域に位置する突起部の数によって第1検出状態および第2検出状態があり、演算部17は、移動体が移動することにより生じる、圧電振動子2bの振動状態の変化に基づいて、移動体1の位置情報を算出する。
【選択図】図3
Description
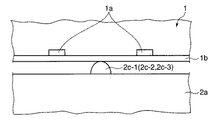
1b 薄板 2 振動体
2a 接触部 2b 圧電振動子
2b−1〜2b−4 駆動電極 2b−5 検知信号取出し電極
2b−6 接地電極 2c、2c−1〜2c−3 突起部
2d〜2h 内部電極 3 回転軸
5 錘部 6 加圧部
7 ケース 11 制御部
12 駆動電圧生成部 13 駆動電流生成部
14 振動状態検知電極 15 検知電圧変換部
16 駆動電圧変換部 17 演算部
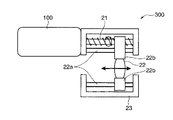
20 圧電薄板 21 リードスクリュー
22 レンズ 22a ガイドレール
22b レンズ支持部 23 ケース
24 支持フレーム 25、27 軸受け
26 キャップ 26a 窪み
100 超音波アクチュエータ 300 レンズ駆動ユニット
P 節
Claims (7)
- 電気信号が入力されることで振動する多層構造の圧電振動子と、前記圧電振動子に対して前記圧電振動子の積層方向側に位置する3つ以上の突起部とを有する振動体と、
前記突起部と接触し、前記突起部に対して移動する移動体と、
前記移動体の位置情報を算出する演算部とを備え、
前記移動体は前記突起部と接触する面に、前記移動体の移動方向に沿って交互に複数形成された、構造的に互いに異なる第1の領域および第2の領域を有し、
前記圧電振動子の振動状態は、前記移動体が移動することにより、前記突起部のすべてが第1の領域に位置する駆動状態と、前記突起部の一部が前記第1の領域に位置し、前記突起部の残りの突起部が前記第2の領域に位置する検出状態とを含み、さらに、前記検出状態においては、前記第1の領域に位置する前記突起部の数によって第1検出状態および第2検出状態があり、
前記演算部は、前記移動体が移動することにより生じる、前記圧電振動子の振動状態の変化に基づいて、前記移動体の位置情報を算出する、超音波アクチュエータ。 - 前記突起部のそれぞれの間隔のうち、少なくとも1つは等間隔ではないように、前記突起部は配置され、かつ、前記第2の領域のそれぞれは等間隔に配置されている、請求項1に記載の超音波アクチュエータ。
- 前記突起部のそれぞれは、等間隔に配置され、かつ、前記第2の領域のそれぞれの間隔のうち、少なくとも1つは等間隔ではないように、前記第2の領域は配置されている、請求項1に記載の超音波アクチュエータ。
- 前記第2の領域は、前記移動体において前記突起部と接触する面に形成された溝であり、前記第1の領域は、該面における前記第2の領域以外の領域である、請求項1に記載の超音波アクチュエータ。
- 前記振動体は、前記圧電振動子の振動状態を検出する振動状態検知電極をさらに有し、
前記演算部は、前記振動状態検知電極により検出された前記圧電振動子の振動状態を用いて、前記移動体の位置情報を算出する、請求項1ないし請求項4のいずれかに記載の超音波アクチュエータ。 - 前記振動状態検知電極は、前記圧電振動子の層間に設置された内部電極である、請求項5に記載の超音波アクチュエータ。
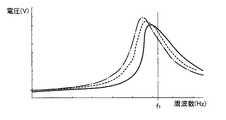
- 前記演算部は、前記圧電振動子の駆動電圧に対する、前記振動状態検知電極により検出された振動検知電圧の位相に基づいて移動体の位置情報を算出する、請求項5に記載の超音波アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009116556A JP5229098B2 (ja) | 2009-05-13 | 2009-05-13 | 超音波アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009116556A JP5229098B2 (ja) | 2009-05-13 | 2009-05-13 | 超音波アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010268564A true JP2010268564A (ja) | 2010-11-25 |
| JP5229098B2 JP5229098B2 (ja) | 2013-07-03 |
Family
ID=43365050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009116556A Expired - Fee Related JP5229098B2 (ja) | 2009-05-13 | 2009-05-13 | 超音波アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5229098B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9263972B2 (en) | 2012-04-19 | 2016-02-16 | Canon Kabushiki Kaisha | Vibrator, vibration type driving apparatus and manufacturing method of vibrator |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63220780A (ja) * | 1987-03-09 | 1988-09-14 | Marcon Electronics Co Ltd | 超音波モ−タ |
| JPH03135383A (ja) * | 1989-10-16 | 1991-06-10 | Canon Inc | 振動波アクチュエータ装置 |
| JPH0880071A (ja) * | 1994-09-06 | 1996-03-22 | Sumitomo Heavy Ind Ltd | 超音波モータの回転速度検出装置及び等速制御装置 |
-
2009
- 2009-05-13 JP JP2009116556A patent/JP5229098B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63220780A (ja) * | 1987-03-09 | 1988-09-14 | Marcon Electronics Co Ltd | 超音波モ−タ |
| JPH03135383A (ja) * | 1989-10-16 | 1991-06-10 | Canon Inc | 振動波アクチュエータ装置 |
| JPH0880071A (ja) * | 1994-09-06 | 1996-03-22 | Sumitomo Heavy Ind Ltd | 超音波モータの回転速度検出装置及び等速制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9263972B2 (en) | 2012-04-19 | 2016-02-16 | Canon Kabushiki Kaisha | Vibrator, vibration type driving apparatus and manufacturing method of vibrator |
| US10541630B2 (en) | 2012-04-19 | 2020-01-21 | Canon Kabushiki Kaisha | Manufacturing method of vibrator |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5229098B2 (ja) | 2013-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7576472B2 (en) | Ultrasonic motor | |
| US7573180B2 (en) | Ultrasonic motor | |
| US7759840B2 (en) | Ultrasonic motor and vibration detection method for ultrasonic motor | |
| KR101524447B1 (ko) | 전기 기계 변환 소자, 진동 액추에이터, 진동 액추에이터의구동 장치, 렌즈 경통 및 카메라 | |
| CN105324928B (zh) | 超声电机 | |
| JP5152336B2 (ja) | 超音波アクチュエータ | |
| JP5229098B2 (ja) | 超音波アクチュエータ | |
| JP5470954B2 (ja) | 超音波アクチュエータ | |
| JP5206425B2 (ja) | 超音波アクチュエータ | |
| JP5353881B2 (ja) | 超音波アクチュエータ | |
| JP7254631B2 (ja) | 振動波モータ、駆動制御システムおよび光学機器 | |
| KR101124807B1 (ko) | 압전 초음파 모터 | |
| JP2010141979A (ja) | 超音波モータ | |
| JP2010074912A (ja) | 超音波モータ | |
| JP2002165469A (ja) | 圧電アクチュエータ | |
| JP2020089161A (ja) | 圧電駆動装置およびロボット | |
| JP4461736B2 (ja) | アクチュエータの駆動装置 | |
| JP2003107389A (ja) | スキャナ駆動装置、スキャナ及び三次元計測装置 | |
| JP5621662B2 (ja) | 圧電モーターの制御方法及び圧電モーター | |
| KR100688012B1 (ko) | 자이로센싱 기능이 부가된 초음파모터 | |
| JPH0583962A (ja) | 振動波モータ装置 | |
| JP2011024312A (ja) | 超音波モータ | |
| JP2013186301A (ja) | 駆動装置、レンズ鏡筒、及びカメラ | |
| JPH11341845A (ja) | 超音波モータ | |
| WO2010041533A1 (ja) | 超音波モータおよび圧電振動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111101 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130304 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160329 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |