JP2010247683A - 搬送車システム - Google Patents
搬送車システム Download PDFInfo
- Publication number
- JP2010247683A JP2010247683A JP2009099747A JP2009099747A JP2010247683A JP 2010247683 A JP2010247683 A JP 2010247683A JP 2009099747 A JP2009099747 A JP 2009099747A JP 2009099747 A JP2009099747 A JP 2009099747A JP 2010247683 A JP2010247683 A JP 2010247683A
- Authority
- JP
- Japan
- Prior art keywords
- branch
- guide roller
- transport vehicle
- pair
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Landscapes
- Platform Screen Doors And Railroad Systems (AREA)
Abstract
【解決手段】搬送車システム1において、第1走行レール4aおよび第2走行レール4bは、直線部7および曲線部8を有する。第1ガイドレール6aは、走行レール(4a,4b)に沿って設けられている。搬送車3は、搬送車本体と、搬送車本体に設けられ走行レール(4a,4b)上に置かれた左右の第1駆動輪25および第2駆動輪28と、搬送車本体に設けられ第1ガイドレール6aにガイドされる第1固定ガイドローラ31を有する。第1モータ26および第2モータ29は、第1駆動輪25および第2駆動輪28にそれぞれ接続されている。走行制御部88は、第1駆動輪25および第2駆動輪28に速度差を生じさせるように第1モータ26および第2モータ29を制御する。
【選択図】図5
Description
このシステムでは、搬送車が曲線部を走行する際には、制御装置が左右の駆動輪に速度差をつけるようにモータを制御する。したがって、ガイドローラからガイドレールに作用する荷重が軽減され、ガイドレールの強度を下げることができる。この結果、コスト低減を実現できる。
さらに、ガイドローラからガイドレールに作用する荷重が軽減することで、騒音が減ったり、摩擦を原因とする粉塵が減ったりする。
このシステムでは、左右の駆動車輪とガイドローラによってボギー台車が回動させられるので、各部材に大きな荷重が作用しない。
このシステムでは、搬送車は、曲線部走行や分岐部走行において、ガイドレールによって確実に支持されたまま、走行できる。また、曲線部においては左右車輪速度差が得られているので、ガイドレールの内側にのみガイドローラを当接させていても、曲線部でのガイドを確実に行うことができる。
このシステムでは、移動機構は曲線部においても一対の分岐ガイドローラの両方をガイドレールから離れさせている。これは、曲線部において左右車輪速度差が得られており、一対の分岐ガイドローラをガイドレールに当接させている必要がないからである。また、左右方向(曲線部の曲がり方向)が異なる曲線部が連続している区間でも、ガイドを切り換えるための準備時間を必要としない。
図1〜図4を用いて、本発明の一実施形態としての搬送車システムについて説明する。図1は、本発明の一実施形態における搬送車3の概略平面図である。図2は、搬送車3の概略平面図である。図3は、搬送車3の概略平面図である。図4は、搬送車3の概略側面図である。
走行レール4は、左右一対の第1走行レール4aおよび第2走行レール4bから構成されている。第1走行レール4aおよび第2走行レール4bは、平坦な走行面を有している。
載置部11は、物品17を載置するための構造である。載置部11は、走行方向前後両端において左右両側に延びる一対の載置部材13と、一対の支持部材を連結するために走行方向前後に延びる複数の連結部材14とを有している。載置部材13は、左右方向に延び載置部13aと、載置部の左右方向両端から下方に延びる柱部13bと、柱部13bの下端同士を連結するために左右方向に延びる連結部13cとを有している。連結部材14は、載置部材13の連結部13c同士を連結している。連結部材14は、4本の部材からなり、それらは一対の左右方向外側部材14aと一対の左右方向内側部材14bとからなる。左右方向内側部材14bの前後両端間には、走行部12が取り付けられる第1取り付け部15および第2取り付け部16が設けられている。載置部11において、第1取り付け部15は走行方向前側に配置され、第2取り付け部16は走行方向後側に配置されている。
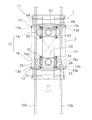
図5を用いて、駆動走行部18を説明する。図5は、駆動走行部18の平面図である。
本体フレーム20は、各部材を支持するための薄板状の部材である。本体フレーム20は左右方向に長く延びており、第1取り付け部15からの延びるシャフト(図示せず)を支持する軸受35が中心部分に設けられている。
第1駆動輪ユニット21は、本体フレーム20の右側端部に装着されており、第1駆動輪25と、第1モータ26と、第1減速機27と、第1エンコーダ96とを有している。第1駆動輪25は、第1走行レール4aの走行面の上に載っている。第1モータ26は、第1減速機27を介して第1駆動輪25に連結されている。第1エンコーダ96は、第1モータ26の回転を計測して、パルス信号を送信する。これにより、第1モータ26の回転速度や回転回数を得ることができる。
第2駆動輪ユニット22は、本体フレーム20の左側端部に装着されており、第2駆動輪28と、第2モータ29と、第2減速機30と、第2エンコーダ97とを有している。第2駆動輪28は、第2走行レール4bの走行面の上に載っている。第2モータ29は、第2減速機30を介して第2駆動輪28に連結されている。第2エンコーダ97は、第2モータ29の回転を計測して、パルス信号を送信する。これにより、第2モータ29の回転速度や回転回数を得ることができる。
固定ガイドローラ機構23は、第1固定ガイドローラ31と、第2固定ガイドローラ32と、第3固定ガイドローラ33と、第4固定ガイドローラ34とを有している。
分岐ガイドローラ機構24は、分岐部9において分岐動作を行うための機構であり、第1分岐ガイドローラ36と、第2分岐ガイドローラ37と、第3分岐ガイドローラ38と、第4分岐ガイドローラ39と、分岐ガイドローラ駆動機構40とを有している。
第2状態では、図12に示すように、第1分岐ガイドローラ36および第2分岐ガイドローラ37が第1ガイドレール6aに当接または近接しており(ガイド位置にあり)、第3分岐ガイドローラ38および第4分岐ガイドローラ39が第2ガイドレール6bから離れている(第2非ガイド位置にある)。
第3状態では、図13に示すように、第1分岐ガイドローラ36および第2分岐ガイドローラ37が第1ガイドレール6aから離れており(第2非ガイド位置にあり)、第3分岐ガイドローラ38および第4分岐ガイドローラ39が第2ガイドレール6bに当接または近接している(ガイド位置にある)。
(3)従動走行部
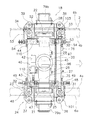
図6を用いて、従動走行部19を説明する。図6は、従動走行部19の平面図である。
本体フレーム57は、各部材を支持するための薄板状の部材である。本体フレーム57は左右方向に長く延びており、第2取り付け部16からの延びるシャフト(図示せず)を支持する軸受74が中間部分に設けられている。
第1従動輪ユニット58は、本体フレーム57の右側端部に装着されており、第1従動輪62を有している。第1従動輪62は、走行レール4の走行面の上に載っている。第1従動輪62は、本体フレーム57に固定されたシャフト98に回転自在に支持されている。
第2従動輪ユニット59は、本体フレーム57の左側端部に装着されており、第2従動輪63を有している。第2従動輪63は、走行レール4の走行面の上に載っている。第2従動輪63は、本体フレーム57に固定されたシャフト99に回転自在に支持されている。
固定ガイドローラ機構60は、第1固定ガイドローラ65と、第2固定ガイドローラ66と、第3固定ガイドローラ67と、第4固定ガイドローラ68とを有している。
なお、固定ガイドローラ機構60は固定ガイドローラ機構23と同様であるので、以下説明を省略する。
分岐ガイドローラ機構61は、分岐部9において分岐動作を行うための機構であり、第1分岐ガイドローラ69と、第2分岐ガイドローラ70と、第3分岐ガイドローラ71と、第4分岐ガイドローラ72と、分岐ガイドローラ駆動機構73とを有している。
なお、分岐ガイドローラ機構61は、分岐ガイドローラ機構24と同様であるので、以下説明を省略する。
図7を用いて、分岐部9について説明する。図7は、本発明の一実施形態としての搬送車システム1の分岐部9および曲線部8の概略平面図である。
第2部分7aにおいて、第2ガイドレール6bは連続して形成されているが、第1ガイドレール6aは一部が途切れている。
駆動走行部18は、さらに、第1光電センサ75と、第2光電センサ76とを有している。第1光電センサ75は、第1走行レール4aに張られた反射テープ104を検出するためのものであり、特に、右曲線部を走行中に反射テープ104を検出するためのものである。第2光電センサ76は、第2走行レール4bに張られた反射テープ(図示せず)を検出するためのものであり、特に、左曲線部を走行中に反射テープ(図示せず)を検出するためのものである。
図8は、本発明の一実施形態としての搬送車システム1の制御構成を示すブロック図である。
ルートマップとは、走行ルートの配置、原点の位置、原点を基準とする基準位置や移載位置の座標を記載したマップである。座標は、原点からの走行距離を搬送車のエンコーダの出力パルス数などに換算したものである。
搬送車3は、ルートマップに記載の座標と自機の内部座標(エンコーダによって求めた座標)とを比較しながら走行を続ける。
図9は、分岐部9における搬送車3の制御動作を示すフローチャートである。ここでは、主に、搬送車コントローラ80による制御動作を説明する。
分岐先が曲線部の場合は、ステップS10に移行して、曲線制御を実行する。
図10は、曲線部における搬送車の制御動作を示すフローチャートである。ここでは、主に、搬送車コントローラ80による制御動作を説明する。
第1駆動輪ユニット21および第2駆動輪ユニット22の着脱構造および着脱動作を説明する。図14は、第1駆動輪ユニット21の概略平面図である。図15は、第1駆動輪ユニット21の概略縦断面図である。第1駆動輪ユニット21および第2駆動輪ユニット22の構造は同じであるので、以下、第1駆動輪ユニット21のみを説明する。
搬送車システム1は、第1走行レール4aおよび第2走行レール4bと、第1ガイドレール6aと、搬送車3と、第1モータ26および第2モータ29と、走行制御部88とを備えている。第1走行レール4aおよび第2走行レール4bは、直線部7および曲線部8を有する。第1ガイドレール6aは、第1走行レール4aおよび第2走行レール4bに沿って設けられている。搬送車3は、搬送車本体と、搬送車本体に設けられ第1走行レール4aおよび第2走行レール4b上に置かれた左右の第1駆動輪25および第2駆動輪28と、搬送車本体に設けられ第1ガイドレール6aにガイドされる第1固定ガイドローラ31および第3固定ガイドローラ33とを有する。第1モータ26および第2モータ29は、第1駆動輪25および第2駆動輪28にそれぞれ接続されている。走行制御部88は、第1駆動輪25および第2駆動輪28に速度差を生じさせるように第1モータ26および第2モータ29を制御することができる。
この搬送車システム1では、搬送車3が曲線部8を走行する際には、走行制御部88が第1駆動輪25および第2駆動輪28に速度差をつけるように第1モータ26および第2モータ29を制御する。したがって、第1固定ガイドローラ31および第3固定ガイドローラ33から第1ガイドレール6aおよび第2ガイドレール6bに作用する荷重が軽減され、第1ガイドレール6aおよび第2ガイドレール6bの強度を下げることができる。この結果、コスト低減を実現できる。
さらに、ガイドローラからガイドレールに作用する荷重が軽減することで、騒音が減ったり、摩擦を原因とする粉塵が減ったりする。
この搬送車システム1では、第1駆動輪25および第2駆動輪28と第1固定ガイドローラ31および第3固定ガイドローラ33によって駆動走行部18および従動走行部19が回動させられるので、各部材に大きな荷重が作用しない。
この搬送車システム1では、搬送車は、曲線部走行や分岐部走行において、ガイドレールによって確実に支持されたまま、走行できる。また、曲線部8においては左右車輪速度差が得られているので、第1ガイドレール6aおよび第2ガイドレール6bの内側にのみ第1固定ガイドローラ31および第3固定ガイドローラ33を当接または近接させていても、曲線部8でのガイドを確実に行うことができる。
この搬送車システム1では、分岐ガイドローラ駆動機構40は曲線部8においても第1分岐ガイドローラ36および第3分岐ガイドローラ38の両方を第1ガイドレール6aおよび第2ガイドレール6bから離れさせている。これは、曲線部8において左右車輪速度差が得られており第1分岐ガイドローラ36および第3分岐ガイドローラ38を第1ガイドレール6aおよび第2ガイドレール6bに当接させている必要がないからである。また、左右方向(曲線部の曲がり方向)が異なる曲線部が連続している区間でも、ガイドを切り換えるための準備時間を必要としない。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
被検出部の設置位置や数は、前記実施形態に限定されない。
2 軌道
3 搬送車
4 走行レール
4a 第1走行レール
4b 第2走行レール
6 ガイドレール
6a 第1ガイドレール
6b 第2ガイドレール
7 直線部
7a 第2部分
8 曲線部
9 分岐部
9a 分岐地点
10a 第1給電線
10b 第2給電線
11 載置部
12 走行部
13 載置部材
13a 載置部
13b 柱部
13c 連結部
14 連結部材
14a 左右方向外側部材
14b 左右方向内側部材
15 第1取り付け部
16 第2取り付け部
17 物品
18 駆動走行部(ボギー台車)
19 従動走行部(ボギー台車)
20 本体フレーム
20a ねじ孔
21 第1駆動輪ユニット
22 第2駆動輪ユニット
23 固定ガイドローラ機構
24 分岐ガイドローラ機構
25 第1駆動輪
26 第1モータ
27 第1減速機
28 第2駆動輪
29 第2モータ
30 第2減速機
31 第1固定ガイドローラ
32 第2固定ガイドローラ
33 第3固定ガイドローラ
34 第4固定ガイドローラ
35 軸受
36 第1分岐ガイドローラ
37 第2分岐ガイドローラ
38 第3分岐ガイドローラ
39 第4分岐ガイドローラ
40 分岐ガイドローラ駆動機構(移動機構)
42 第1シリンダ
43 第1シャフト
44 第2シャフト
45 連結シャフト
47 第1部分
48 第2部分
49 第3部分
51 回動中心部
52 第4部分
53 第5部分
54 第6部分
55 回動中心部
57 本体フレーム
58 第1従動輪ユニット
59 第2従動輪ユニット
60 固定ガイドローラ機構
61 分岐ガイドローラ機構
62 第1従動輪
63 第2従動輪
65 第1固定ガイドローラ
66 第2固定ガイドローラ
67 第3固定ガイドローラ
68 第4固定ガイドローラ
69 第1分岐ガイドローラ
70 第2分岐ガイドローラ
71 第3分岐ガイドローラ
72 第4分岐ガイドローラ
73 分岐ガイドローラ駆動機構
74 軸受
75 第1光電センサ
76 第2光電センサ
77 リニアスケール
78 バーコードリーダ
79a 第1ピックアップユニット
79b 第2ピックアップユニット
80 搬送車コントローラ
81 CADシステム
82 コントローラ本体
83 第1メモリ
84 システム本体
85 第2メモリ
87 制御部
88 走行制御部(制御装置)
89 分岐制御部
90 第3メモリ
91 第2シリンダ
92 第3シャフト
93 第4シャフト
94 第2連結シャフト
96 第1エンコーダ
97 第2エンコーダ
98 シャフト
99 シャフト
101 第1部材
103 第2部材
104 反射テープ
105 鉄板
106 バーコード
110 第1取付プレート
111 第1部分
111a 固定部
111b 連結部
111c ボルト貫通孔
111d 端部
112 第2部分
115 第2取付プレート
116 第3部分
117 第4部分
118 搬送車停止位置
119 ボルト
Claims (4)
- 直線部および曲線部を有する一対の走行レールと、
前記一対の走行レールに沿って設けられたガイドレールと、
搬送車本体と、前記搬送車本体に設けられ前記一対の走行レール上に置かれた左右の駆動輪と、前記搬送車本体に設けられ前記ガイドレールにガイドされるガイドローラとを有する搬送車と、
前記左右の駆動輪にそれぞれ接続されたモータと、
前記左右の駆動輪に速度差を生じさせるように前記モータを制御する制御装置と、
を備えた搬送車システム。 - 前記搬送車は、前記搬送車本体に軸支され前後に配置された一対のボギー台車をさらに備え、
前記左右の駆動車輪と前記ガイドローラは、少なくとも一方の前記ボギー台車に設けられている、請求項1に記載の搬送車システム。 - 前記一対の走行レールは分岐部をさらに有しており、
前記ガイドレールは、前記一対の走行レールに沿った一対のガイドレールであり、
前記ガイドローラは、前記一対のガイドレールの内側に当接または近接する一対の固定ローラであり、
前記搬送車は、分岐切換を行うための一対の分岐ガイドローラをさらに有しており、
前記一対の分岐ガイドローラを、前記一対のガイドレールの外側に当接または近接するガイド位置と、前記一対のガイドレールの外側から離れる非ガイド位置とで移動させることができる移動機構をさらに備えている、請求項1または2に記載の搬送車システム。 - 前記移動機構は、前記直線部および前記曲線部では前記一対の分岐ガイドローラの両方を前記非ガイド位置に移動させており、前記分岐部では前記一対の分岐ガイドローラの一方のみを前記ガイド位置に移動させて分岐動作を実行する、請求項3に記載の搬送車システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009099747A JP5521381B2 (ja) | 2009-04-16 | 2009-04-16 | 搬送車システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009099747A JP5521381B2 (ja) | 2009-04-16 | 2009-04-16 | 搬送車システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010247683A true JP2010247683A (ja) | 2010-11-04 |
| JP5521381B2 JP5521381B2 (ja) | 2014-06-11 |
Family
ID=43310556
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009099747A Active JP5521381B2 (ja) | 2009-04-16 | 2009-04-16 | 搬送車システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5521381B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010247684A (ja) * | 2009-04-16 | 2010-11-04 | Murata Machinery Ltd | 搬送車 |
| JP2012006434A (ja) * | 2010-06-23 | 2012-01-12 | Murata Machinery Ltd | 搬送車システム |
| WO2013069535A1 (ja) * | 2011-11-08 | 2013-05-16 | 株式会社Ihi | 台車及び台車搬送システム |
| CN109398373A (zh) * | 2018-12-05 | 2019-03-01 | 辽宁工业大学 | 一种悬挂式双驱换道系统及其轨道 |
| CN109572723A (zh) * | 2018-11-29 | 2019-04-05 | 曾上容 | 一种无人驾驶无轮车辆系统 |
| CN111908123A (zh) * | 2019-05-10 | 2020-11-10 | 赛努斯科技有限公司 | 储料器输送机 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4844913A (ja) * | 1971-10-04 | 1973-06-27 | ||
| JPS4881274A (ja) * | 1972-02-02 | 1973-10-31 | ||
| JPS63110160U (ja) * | 1987-01-09 | 1988-07-15 | ||
| JPH0687436A (ja) * | 1992-09-04 | 1994-03-29 | Murata Mach Ltd | 物品搬送装置 |
| JP2000142386A (ja) * | 1998-11-05 | 2000-05-23 | Toyota Autom Loom Works Ltd | 搬送台車 |
| JP2000159099A (ja) * | 1998-11-27 | 2000-06-13 | Nkk Corp | 有軌道台車 |
| JP2000318603A (ja) * | 1999-05-12 | 2000-11-21 | Mitsubishi Heavy Ind Ltd | 自走台車による搬送装置 |
| JP2001071895A (ja) * | 1999-09-06 | 2001-03-21 | Kawasaki Heavy Ind Ltd | 舵取り装置付の台車を用いた搬送設備 |
| JP2005219643A (ja) * | 2004-02-06 | 2005-08-18 | Murata Mach Ltd | 有軌道台車 |
| JP2005297683A (ja) * | 2004-04-08 | 2005-10-27 | Murata Mach Ltd | 有軌道台車システム |
| JP2008079373A (ja) * | 2006-09-19 | 2008-04-03 | Murata Mach Ltd | 天井走行車システム |
| JP2010247684A (ja) * | 2009-04-16 | 2010-11-04 | Murata Machinery Ltd | 搬送車 |
| JP2010247685A (ja) * | 2009-04-16 | 2010-11-04 | Murata Machinery Ltd | 搬送車システム |
-
2009
- 2009-04-16 JP JP2009099747A patent/JP5521381B2/ja active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4844913A (ja) * | 1971-10-04 | 1973-06-27 | ||
| JPS4881274A (ja) * | 1972-02-02 | 1973-10-31 | ||
| JPS63110160U (ja) * | 1987-01-09 | 1988-07-15 | ||
| JPH0687436A (ja) * | 1992-09-04 | 1994-03-29 | Murata Mach Ltd | 物品搬送装置 |
| JP2000142386A (ja) * | 1998-11-05 | 2000-05-23 | Toyota Autom Loom Works Ltd | 搬送台車 |
| JP2000159099A (ja) * | 1998-11-27 | 2000-06-13 | Nkk Corp | 有軌道台車 |
| JP2000318603A (ja) * | 1999-05-12 | 2000-11-21 | Mitsubishi Heavy Ind Ltd | 自走台車による搬送装置 |
| JP2001071895A (ja) * | 1999-09-06 | 2001-03-21 | Kawasaki Heavy Ind Ltd | 舵取り装置付の台車を用いた搬送設備 |
| JP2005219643A (ja) * | 2004-02-06 | 2005-08-18 | Murata Mach Ltd | 有軌道台車 |
| JP2005297683A (ja) * | 2004-04-08 | 2005-10-27 | Murata Mach Ltd | 有軌道台車システム |
| JP2008079373A (ja) * | 2006-09-19 | 2008-04-03 | Murata Mach Ltd | 天井走行車システム |
| JP2010247684A (ja) * | 2009-04-16 | 2010-11-04 | Murata Machinery Ltd | 搬送車 |
| JP2010247685A (ja) * | 2009-04-16 | 2010-11-04 | Murata Machinery Ltd | 搬送車システム |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010247684A (ja) * | 2009-04-16 | 2010-11-04 | Murata Machinery Ltd | 搬送車 |
| JP2012006434A (ja) * | 2010-06-23 | 2012-01-12 | Murata Machinery Ltd | 搬送車システム |
| WO2013069535A1 (ja) * | 2011-11-08 | 2013-05-16 | 株式会社Ihi | 台車及び台車搬送システム |
| JP2013099990A (ja) * | 2011-11-08 | 2013-05-23 | Ihi Corp | 台車搬送システム |
| CN103842233A (zh) * | 2011-11-08 | 2014-06-04 | 株式会社Ihi | 台车以及台车搬运系统 |
| TWI495587B (zh) * | 2011-11-08 | 2015-08-11 | Ihi Corp | Trolley and Trolley Handling System |
| CN103842233B (zh) * | 2011-11-08 | 2016-05-04 | 株式会社Ihi | 台车以及台车搬运系统 |
| CN109572723A (zh) * | 2018-11-29 | 2019-04-05 | 曾上容 | 一种无人驾驶无轮车辆系统 |
| CN109398373A (zh) * | 2018-12-05 | 2019-03-01 | 辽宁工业大学 | 一种悬挂式双驱换道系统及其轨道 |
| CN109398373B (zh) * | 2018-12-05 | 2024-05-28 | 辽宁工业大学 | 一种悬挂式双驱换道系统及其轨道 |
| CN111908123A (zh) * | 2019-05-10 | 2020-11-10 | 赛努斯科技有限公司 | 储料器输送机 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5521381B2 (ja) | 2014-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5045705B2 (ja) | 搬送車システム | |
| JP5104909B2 (ja) | 搬送車システム | |
| JP5521381B2 (ja) | 搬送車システム | |
| EP2511150B1 (en) | Item conveyance infrastructure | |
| JP2009280134A (ja) | 車体に対する足回り部品の同期搬送装置及び同期搬送方法 | |
| JP4683143B2 (ja) | 搬送車 | |
| JP5115513B2 (ja) | 搬送車 | |
| JP2008036714A (ja) | ワーク搬送装置の制御方法および制御装置 | |
| JP2000159099A (ja) | 有軌道台車 | |
| JP5598183B2 (ja) | 搬送装置 | |
| JP2012006432A (ja) | 搬送車システム | |
| JP2012010444A (ja) | 搬送車システム | |
| JP2007320545A (ja) | 走行車および走行車システム | |
| JP5170190B2 (ja) | 搬送車システム | |
| JP5348107B2 (ja) | 搬送車 | |
| JP5678560B2 (ja) | 自走式キャリア | |
| JP4308746B2 (ja) | 自動走行台車 | |
| JP2010282329A (ja) | 無人搬送車 | |
| JP2007004374A (ja) | 搬送車 | |
| JPH09110398A (ja) | 無人搬送車の誘導ガイド方式 | |
| JP5252003B2 (ja) | 搬送車システム | |
| JP4220948B2 (ja) | 無軌道式の自動走行台車 | |
| KR20140070027A (ko) | 주행 시스템 및 주행 방법 | |
| JP4145859B2 (ja) | トラバーサの停止制御方法および停止制御システム | |
| JP2005104407A (ja) | 無人搬送車およびこれの走行制御方法並びに無人搬送車を用いた自動搬送システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120321 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120918 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140324 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5521381 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |