JP2010196532A - 車両用内燃機関の制御装置 - Google Patents
車両用内燃機関の制御装置 Download PDFInfo
- Publication number
- JP2010196532A JP2010196532A JP2009040450A JP2009040450A JP2010196532A JP 2010196532 A JP2010196532 A JP 2010196532A JP 2009040450 A JP2009040450 A JP 2009040450A JP 2009040450 A JP2009040450 A JP 2009040450A JP 2010196532 A JP2010196532 A JP 2010196532A
- Authority
- JP
- Japan
- Prior art keywords
- valve
- intake
- vehicle
- timing
- intake valve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000002485 combustion reaction Methods 0.000 title claims abstract description 47
- 230000007246 mechanism Effects 0.000 claims description 68
- 230000008859 change Effects 0.000 claims description 48
- 230000001133 acceleration Effects 0.000 claims description 17
- 238000013459 approach Methods 0.000 abstract description 12
- 238000012937 correction Methods 0.000 abstract description 12
- 230000003111 delayed effect Effects 0.000 abstract description 5
- 239000000446 fuel Substances 0.000 description 37
- 239000007789 gas Substances 0.000 description 23
- 238000002347 injection Methods 0.000 description 23
- 239000007924 injection Substances 0.000 description 23
- 239000003921 oil Substances 0.000 description 16
- 238000005086 pumping Methods 0.000 description 11
- 230000007423 decrease Effects 0.000 description 9
- 238000000034 method Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 4
- 239000010705 motor oil Substances 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 230000000994 depressogenic effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000010720 hydraulic oil Substances 0.000 description 3
- 238000005192 partition Methods 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 230000003197 catalytic effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000003134 recirculating effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【解決手段】走行中にアクセルを放した車両の減速要求状態において、吸気バルブの閉時期IVCを下死点BDCに固定する一方、車速VSPの変化量ΔVSPが目標に近づくように、前記吸気バルブの開時期IVOを上死点TDC後に遅角補正する。前記開時期IVOの遅角補正においては、排気バルブの閉時期EVCに応じて遅角限界値を設定し、該遅角限界値を超える遅角補正を禁止する。
【選択図】図6
Description
図1は、実施形態における車両用の内燃機関を示す。
図1に示す内燃機関101は、2つのバンク101a,101bからなるV型6気筒機関であり、その出力軸が図外の変速機を介して車両の駆動輪に連結されている。
前記燃焼室102(シリンダ)の吸気口102aは、吸気バルブ106で開閉され、ピストン107が降下するときに前記吸気バルブ106が開くと、燃焼室102内に空気が吸引される。
尚、燃料噴射弁108が燃焼室102内に燃料を直接噴射する筒内直接噴射式内燃機関であってもよい。
また、前記吸気ダクト103には、電子制御スロットル116(吸気絞り弁)が介装されている。
まず、前記エアフローセンサ127で検出される吸入空気流量QAと、クランク角センサ125からの出力信号に基づいて算出される機関回転速度NEとから基本燃料噴射パルス幅TPを演算する。
前記燃料噴射弁108は、前記燃料噴射パルス幅TIに相当する時間だけ開弁し、開弁時間に比例する量の燃料を噴射する。
具体的には、アクセル開度が全閉でかつ機関回転速度NEがカット開始回転速度よりも高い場合に、燃料噴射の中止を開始させ、アクセルが開かれるか(アクセルペダルが踏み込まれるか)、及び/又は、機関回転速度NEがリカバー回転速度(0<リカバー回転速度<カット開始回転速度)を下回るようになると、燃料噴射弁108による燃料噴射を再開させる。
前記ECM121は、例えば、機関負荷(基本燃料噴射パルス幅TP)と機関回転速度NEとに基づいて点火時期を算出し、該点火時期及び点火エネルギを得るための通電時間とから、前記点火コイルへの通電開始時期及び通電遮断時期を決定し、該通電開始時期及び通電遮断時期に対応する点火制御信号で前記パワートランジスタのオン・オフを制御し、前記点火時期での火花点火を気筒毎に実行させる。
このように、前記油圧ブレーキ装置200では、マスタバック202で倍力作用を行わせるために吸気負圧が必要であり、また、排気還流装置250では、排気を吸気系に還流させるために吸気負圧が必要となる。
前記吸気バルブ106の上方に、前記クランクシャフト110によって回転駆動される吸気カムシャフト131が、気筒列方向に沿って回転可能に図外のシリンダヘッドに支持されている。
前記吸気カムシャフト131と揺動カム4との間には、吸気バルブ106のバルブ作動角及びバルブリフト量を連続的に変更するための可変リフト機構134a,134bが設けられている。
上記の構成により、クランクシャフト110に連動して吸気カムシャフト131が回転すると、駆動カム11を介してリング状リンク12がほぼ並進移動すると共に、ロッカアーム15が制御カム14の軸心周りに揺動し、ロッド状リンク16を介して揺動カム4が揺動して吸気バルブ106が開駆動される。
尚、バルブ作動角及びバルブリフト量が連続的に変化すると同時、バルブ作動角の中心位相が変化するように構成した可変リフト機構134a,134bであってもよい。
前記油圧回路54は、進角側油圧室82に対して油圧を給排する第1油圧通路91と、遅角側油圧室83に対して油圧を給排する第2油圧通路92との2系統の油圧通路を有し、この両油圧通路91,92には、供給通路93とドレン通路94a,94bとがそれぞれ通路切り換え用の電磁切換弁95を介して接続されている。
前記ECM121は、前記電磁切換弁95を駆動する電磁アクチュエータ99に対する通電量を、ディザ信号が重畳されたデューティ制御信号(操作量)に基づいて制御する。
図5に示すように、可変リフト機構134a,134bを動作させると、矢印(イ)に示すように、吸気バルブ106のバルブ作動角の中心位相が略一定のままで、吸気バルブ106のバルブ作動角及びバルブリフト量の双方が連続的に増減変化する。
そして、アクセル開度ACCが全閉でなく、車両の運転者がアクセルペダルを踏んでいる場合には、ステップS602へ進み、前記可変バルブタイミング機構133a,133b及び可変リフト機構134a,134bを、残留ガス量,シリンダ吸入空気量の要求(運転条件に対応してマップに記憶されている目標値)に基づいて制御する通常制御を実施する。
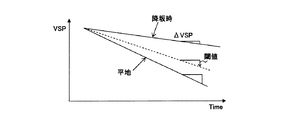
ステップS605では、前記変化量ΔVSP(車両の加速度)と予め記憶された閾値VSPSLとを比較し、変化量ΔVSPが閾値VSPSLを超えているか否かを判断する。
上記閉時期IVCを下死点BDCに固定する設定は、ポンピングロスを大きくし、より強いエンジンブレーキを発生させるために行われる。
尚、車両の減速要求状態での閉時期IVCの目標は、下死点BDCに限定するものではなく、閉時期IVCを下死点BDCよりも僅かに進角又は遅角した位置としても、充分なエンジンブレーキ力が得られるのであれば、下死点BDCから僅かにずれた位置を閉時期IVCとすべく、可変動弁機構(可変バルブタイミング機構133a,133b及び可変リフト機構134a,134b)の目標値を設定させることができる。
即ち、ステップS611では、前回までの開時期IVOを一定角度だけ遅角補正して、今回の目標開時期IVOとし、次回も実際の変化量ΔVSPが目標値以上であると判断された場合には、更に、一定角度だけ開時期IVOを遅角変化させる。
一方、ステップS610で、実際の変化量ΔVSPが目標値未満であると判断された場合、換言すれば、降坂中であるものの、平地での減速よりも急に車速が減少変化している場合には、ステップS612へ進む。
前記遅角限界値とは、許容される最も遅い開時期IVOであって、例えば上死点TDC後のクランク角度として設定される。
そして、開時期IVOが遅角限界値よりも遅角側に設定されている場合は、ステップS615へ進み、開時期IVOを遅角限界値に設定し(開時期IVOを遅角限界値まで進角し)、遅角限界値よりも遅角側に開時期IVOが設定されることを回避する。
一方、開時期IVOが遅角限界値に一致するか、遅角限界値よりも進角側に設定されている場合には、ステップS615を迂回することで、遅角限界値に基づき修正することなくそのときの開時期IVOの設定を保持させる。
吸気バルブ106及び排気バルブ111のバルブタイミングが、減速時において固定である場合には、運転状態に対してエンジンブレーキが利きすぎたり、減速度合いの調整がブレーキ装置200に依存されることになり、ブレーキ操作が煩雑に行われることになったりして、運転性が悪い。
また、本実施形態では、電子制御スロットル116を負圧制御弁として用い、減速時に負圧を確保するようにスロットル開度を制御することができるので、ブレーキ装置200(負圧倍力手段としてのマスタバック202)が必要とする負圧を確保することができ、エンジンブレーキを使用しつつ、ブレーキ装置200により十分なブレーキ力を得ることが可能となり、運転性が向上する。
(イ)請求項3記載の車両用内燃機関の制御装置において、
前記遅角限界値が、前記内燃機関の排気バルブの閉時期に応じて設定されることを特徴とする車両用内燃機関の制御装置。
(ロ)請求項1〜3のいずれか1つに記載の車両用内燃機関の制御装置において、
アクセルの全閉状態であって、かつ、車両の加速度が閾値を越える場合に、前記車両の減速要求状態を判定することを特徴とする車両用内燃機関の制御装置。
(ハ)請求項1〜3のいずれか1つに記載の車両用内燃機関の制御装置において、
前記内燃機関の前記吸気バルブの上流側に吸気絞り弁が備えられると共に、前記吸気絞り弁と前記吸気バルブとの間の吸気負圧を利用してブレーキ操作力を倍力する負圧倍力手段が車両に備えられ、
前記車両の減速要求状態が判定されたとき、前記負圧倍力手段が要求する吸気負圧に近づくように、前記吸気絞り弁の開度を制御することを特徴とする車両用内燃機関の制御装置。
Claims (3)
- 吸気バルブのバルブタイミングを可変とする可変動弁機構を備えた車両用内燃機関に適用される制御装置であって、
車両の減速要求状態において、実際の加速度が目標加速度よりも高い場合に、前記可変動弁機構を制御して前記吸気バルブの開時期を遅角変化させることを特徴とする車両用内燃機関の制御装置。 - 吸気バルブのバルブタイミングを可変とする可変動弁機構を備えた車両用内燃機関に適用される制御装置であって、
車両の減速要求状態において、前記可変動弁機構を制御して、前記吸気バルブの閉時期を下死点に固定し、かつ、前記吸気バルブの開時期を前記車両の加速度に応じて変化させることを特徴とする車両用内燃機関の制御装置。 - 吸気バルブのバルブタイミングを可変とする可変動弁機構を備えた車両用内燃機関に適用される制御装置であって、
車両の減速要求状態において、前記可変動弁機構を制御して、前記吸気バルブの閉時期を下死点に固定し、かつ、前記吸気バルブの開時期を前記車両の加速度に応じて変化させると共に、前記吸気バルブの開時期の遅角限界値を設定し、前記加速度に応じた前記開時期の変化を、前記遅角限界値に基づいて制限することを特徴とする車両用内燃機関の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009040450A JP2010196532A (ja) | 2009-02-24 | 2009-02-24 | 車両用内燃機関の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009040450A JP2010196532A (ja) | 2009-02-24 | 2009-02-24 | 車両用内燃機関の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010196532A true JP2010196532A (ja) | 2010-09-09 |
Family
ID=42821501
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009040450A Pending JP2010196532A (ja) | 2009-02-24 | 2009-02-24 | 車両用内燃機関の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010196532A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2426187A2 (en) | 2010-09-02 | 2012-03-07 | Kabushiki Kaisha Toshiba | Fluorescent substance and light-emitting device employing the same |
| EP2698509A4 (en) * | 2011-04-15 | 2014-07-23 | Toyota Motor Co Ltd | ENGINE CONTROL DEVICE |
| JP2015055220A (ja) * | 2013-09-12 | 2015-03-23 | 日立オートモティブシステムズ株式会社 | 内燃機関の制御装置 |
| JP2017180352A (ja) * | 2016-03-31 | 2017-10-05 | マツダ株式会社 | エンジンの制御装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04187806A (ja) * | 1990-11-21 | 1992-07-06 | Nissan Motor Co Ltd | 内燃機関の制御装置 |
| JPH08200107A (ja) * | 1995-01-19 | 1996-08-06 | Toyota Motor Corp | 内燃機関のバルブタイミング制御装置 |
| JP2002089302A (ja) * | 2000-09-08 | 2002-03-27 | Nissan Motor Co Ltd | 内燃機関のバルブ制御装置 |
| JP2003176733A (ja) * | 2001-12-11 | 2003-06-27 | Denso Corp | 車両のエンジンブレーキ制御装置 |
| JP2005315232A (ja) * | 2004-04-30 | 2005-11-10 | Toyota Motor Corp | 内燃機関及び内燃機関の制御装置 |
| JP2007085188A (ja) * | 2005-09-20 | 2007-04-05 | Toyota Motor Corp | エンジンの制御装置 |
| JP2007327363A (ja) * | 2006-06-06 | 2007-12-20 | Toyota Motor Corp | エンジンの制御装置 |
-
2009
- 2009-02-24 JP JP2009040450A patent/JP2010196532A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04187806A (ja) * | 1990-11-21 | 1992-07-06 | Nissan Motor Co Ltd | 内燃機関の制御装置 |
| JPH08200107A (ja) * | 1995-01-19 | 1996-08-06 | Toyota Motor Corp | 内燃機関のバルブタイミング制御装置 |
| JP2002089302A (ja) * | 2000-09-08 | 2002-03-27 | Nissan Motor Co Ltd | 内燃機関のバルブ制御装置 |
| JP2003176733A (ja) * | 2001-12-11 | 2003-06-27 | Denso Corp | 車両のエンジンブレーキ制御装置 |
| JP2005315232A (ja) * | 2004-04-30 | 2005-11-10 | Toyota Motor Corp | 内燃機関及び内燃機関の制御装置 |
| JP2007085188A (ja) * | 2005-09-20 | 2007-04-05 | Toyota Motor Corp | エンジンの制御装置 |
| JP2007327363A (ja) * | 2006-06-06 | 2007-12-20 | Toyota Motor Corp | エンジンの制御装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2426187A2 (en) | 2010-09-02 | 2012-03-07 | Kabushiki Kaisha Toshiba | Fluorescent substance and light-emitting device employing the same |
| EP2698509A4 (en) * | 2011-04-15 | 2014-07-23 | Toyota Motor Co Ltd | ENGINE CONTROL DEVICE |
| JPWO2012140779A1 (ja) * | 2011-04-15 | 2014-07-28 | トヨタ自動車株式会社 | エンジンの制御装置 |
| US8869772B2 (en) | 2011-04-15 | 2014-10-28 | Toyota Jidosha Kabushiki Kaisha | Engine control apparatus |
| JP2015055220A (ja) * | 2013-09-12 | 2015-03-23 | 日立オートモティブシステムズ株式会社 | 内燃機関の制御装置 |
| JP2017180352A (ja) * | 2016-03-31 | 2017-10-05 | マツダ株式会社 | エンジンの制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4850744B2 (ja) | 内燃機関の吸気制御装置 | |
| US8180552B2 (en) | Variable valve timing apparatus and control method thereof | |
| US7440827B2 (en) | Method of controlling series hybrid electric vehicle powertrain | |
| US7077085B2 (en) | Variable valve control system and method for multi-cylinder internal combustion engine | |
| US7690338B2 (en) | Method of starting internal combustion engine | |
| US8355857B2 (en) | Control apparatus of internal combustion engine for vehicle | |
| US7082923B2 (en) | Idling speed control system and method | |
| JP2010196532A (ja) | 車両用内燃機関の制御装置 | |
| JP5216925B2 (ja) | 内燃機関の制御装置 | |
| US8265857B2 (en) | Apparatus for and method of controlling engine | |
| CN110382844A (zh) | 发动机的控制装置 | |
| JP5026446B2 (ja) | 内燃機関の制御装置 | |
| JP3771101B2 (ja) | 内燃機関の制御装置 | |
| JP5249814B2 (ja) | 可変動弁機構の制御装置 | |
| JP4937188B2 (ja) | 内燃機関の可変動弁装置 | |
| JP4777331B2 (ja) | 内燃機関の制御装置 | |
| JP2010077813A (ja) | 内燃機関の制御装置 | |
| JP2010203383A (ja) | 内燃機関の制御装置 | |
| JP5092956B2 (ja) | 車両用の内燃機関を制御する方法及び内燃機関システム | |
| JP2010024970A (ja) | 駆動力制御装置 | |
| JP2010174742A (ja) | 内燃機関の制御装置 | |
| JP2009079578A (ja) | 火花点火式内燃機関の点火時期制御装置 | |
| JP5108811B2 (ja) | 車両用内燃機関の可変動弁装置 | |
| JP5165621B2 (ja) | 内燃機関の制御装置 | |
| JP2006070824A (ja) | 内燃機関のバルブタイミング制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120823 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121022 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121113 |