JP2010144596A - 内燃機関の制御装置 - Google Patents
内燃機関の制御装置 Download PDFInfo
- Publication number
- JP2010144596A JP2010144596A JP2008321947A JP2008321947A JP2010144596A JP 2010144596 A JP2010144596 A JP 2010144596A JP 2008321947 A JP2008321947 A JP 2008321947A JP 2008321947 A JP2008321947 A JP 2008321947A JP 2010144596 A JP2010144596 A JP 2010144596A
- Authority
- JP
- Japan
- Prior art keywords
- control shaft
- control
- rotation angle
- combustion engine
- internal combustion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Abstract
【課題】アクチュエータを駆動してバルブの動作特性を可変に設定可能な内燃機関において、アクチュエータのコギングトルクを利用して、該アクチュエータを安定位置に停止させる。
【解決手段】内燃機関のバルブのリフト量を可変に設定するための制御軸12を有し、制御軸12を回転させてリフト量を可変させる可変動弁機構10と、制御軸12を所定の回転角度域へ回転させるモータ14と、内燃機関の停止時に、モータ14を駆動して制御軸12を所定の回転角度域へ回転させる停止時制御手段と、を備える。モータ14の駆動トルクは、制御軸12の回転角度に応じて脈動するコギングトルクを含んでおり、停止時制御手段は、コギングトルクの付勢方向が該制御軸の回転方向から反対方向へ切り替わる位置(安定位置)を含む回転角度域へ制御軸12を回転させる。
【選択図】図4
【解決手段】内燃機関のバルブのリフト量を可変に設定するための制御軸12を有し、制御軸12を回転させてリフト量を可変させる可変動弁機構10と、制御軸12を所定の回転角度域へ回転させるモータ14と、内燃機関の停止時に、モータ14を駆動して制御軸12を所定の回転角度域へ回転させる停止時制御手段と、を備える。モータ14の駆動トルクは、制御軸12の回転角度に応じて脈動するコギングトルクを含んでおり、停止時制御手段は、コギングトルクの付勢方向が該制御軸の回転方向から反対方向へ切り替わる位置(安定位置)を含む回転角度域へ制御軸12を回転させる。
【選択図】図4
Description
この発明は、内燃機関の制御装置に関し、特に、バルブの動作特性を可変に設定可能な可変動弁装置を有する内燃機関の制御装置に関する。
従来、例えば、特開2008−215313号公報には、電動モータを駆動することによりバルブタイミングを調整する内燃機関のバルブタイミング調整装置が開示されている。この装置は、電動モータのモータ軸に該モータ軸の回転方向に相反磁極を交互に形成する第1永久磁石部材と、該モータ軸を支持するハウジングに固定されて、磁気ギャップを挟んで第1永久磁石部材と向き合い相反磁極を回転方向に交互に形成する第2永久磁石部材と、を有している。これらの磁石部材の間には磁界が形成される。このため、回転側となる第1永久磁石部材には、モータ軸の回転ずれを妨げる向きに保持トルクが発生する。そこで、上記従来の装置では、内燃機関の停止状態にこの保持トルクを利用して、モータ軸を所望の始動位相に保持することとしている。また、電動モータは、固有のコギングトルクを有している。そこで、上記従来の技術では、かかるコギングトルクをも利用して、モータ軸を保持することとしている。
電動モータ等のアクチュエータに作用するコギングトルクは、回転軸の回転角度に依存して細かく脈動している。より具体的には、コギングトルクの付勢方向が回転軸の回転方向から反対方向へ切り替わる位置は、該コギングトルクが回転軸の位置ずれを妨げる方向に付勢される安定位置となる。一方、コギングトルクの付勢方向が回転軸の回転方向と反対の方向から回転方向へ切り替わる位置は、該コギングトルクが回転軸の位置ずれを助長する方向に付勢される不安定位置となる。このように、回転軸に付勢されるコギングトルクの大きさおよび向きは、回転軸の停止位置によって異なることとなる。
しかしながら、上記従来の技術では、内燃機関の停止時におけるモータ軸の停止位置とコギングトルクとの関係についての考察はなされていない。つまり、上記従来の技術では、所望の始動位相を実現した後にモータへの通電をカットすることとしているが、かかる始動位相が該モータの回転軸の安定位置である補償はない。このため、かかる始動位相が安定位置でない場合には、位相がずれてしまい次回の始動時に所望の始動位相を実現できないおそれがある。このように、アクチュエータの安定位置についての考察がなされていない上記従来の装置は、未だ改善の余地を残すものであった。
この発明は、上述のような課題を解決するためになされたもので、アクチュエータを駆動してバルブの動作特性を可変に設定可能な内燃機関において、アクチュエータのコギングトルクを利用して、該アクチュエータを安定位置に停止させることのできる内燃機関の制御装置を提供することを目的とする。
第1の発明は、上記の目的を達成するため、内燃機関の制御装置であって、
内燃機関のバルブのリフト量を可変に設定するための制御軸を有し、前記制御軸をリフト増大方向へ回転させることによって前記リフト量が増大し、前記制御軸をリフト減少方向へ回転させることによって前記リフト量が減少する可変動弁装置と、
前記バルブに作用するバルブ反力で、前記制御軸をリフト減少方向へ付勢するバルブ反力付勢機構と、
前記制御軸を所定の回転角度域へ回転させるアクチュエータと、
前記内燃機関の停止時に、前記アクチュエータを駆動して前記制御軸を所定の回転角度域へ回転させる停止時制御手段と、を備え、
前記制御軸に付勢される前記アクチュエータの駆動トルクは、前記制御軸の回転角度に応じて脈動するコギングトルクを含み、
前記停止時制御手段は、前記コギングトルクの付勢方向が該制御軸の回転方向から反対方向へ切り替わる位置(以下、安定位置)を含む回転角度域へ前記制御軸を回転させることを特徴とする。
内燃機関のバルブのリフト量を可変に設定するための制御軸を有し、前記制御軸をリフト増大方向へ回転させることによって前記リフト量が増大し、前記制御軸をリフト減少方向へ回転させることによって前記リフト量が減少する可変動弁装置と、
前記バルブに作用するバルブ反力で、前記制御軸をリフト減少方向へ付勢するバルブ反力付勢機構と、
前記制御軸を所定の回転角度域へ回転させるアクチュエータと、
前記内燃機関の停止時に、前記アクチュエータを駆動して前記制御軸を所定の回転角度域へ回転させる停止時制御手段と、を備え、
前記制御軸に付勢される前記アクチュエータの駆動トルクは、前記制御軸の回転角度に応じて脈動するコギングトルクを含み、
前記停止時制御手段は、前記コギングトルクの付勢方向が該制御軸の回転方向から反対方向へ切り替わる位置(以下、安定位置)を含む回転角度域へ前記制御軸を回転させることを特徴とする。
第2の発明は、第1の発明において、
前記停止制御手段は、前記制御軸を前記コギングトルクの谷側となる回転角度域へ前記制御軸を回転させることを特徴とする。
前記停止制御手段は、前記制御軸を前記コギングトルクの谷側となる回転角度域へ前記制御軸を回転させることを特徴とする。
第3の発明は、第1または第3の発明において、
前記停止制御手段は、前記制御軸をリフト増大方向へ回転させて、前記停止回転角度域へ前記制御軸を回転させることを特徴とする。
前記停止制御手段は、前記制御軸をリフト増大方向へ回転させて、前記停止回転角度域へ前記制御軸を回転させることを特徴とする。
第4の発明は、第1乃至第3の何れか1つの発明において、
前記停止制御手段は、前記停止回転角度域へ前記制御軸を回転させた後に、前記アクチュエータの駆動トルクを徐々に減少させることを特徴とする。
前記停止制御手段は、前記停止回転角度域へ前記制御軸を回転させた後に、前記アクチュエータの駆動トルクを徐々に減少させることを特徴とする。
第5の発明は、第1乃至第3の何れか1つの発明において、
前記停止制御手段は、前記停止回転角度域へ前記制御軸を回転させた後に、前記アクチュエータにリフト減少方向の駆動トルクを一時的に付勢することを付与することを特徴とする。
前記停止制御手段は、前記停止回転角度域へ前記制御軸を回転させた後に、前記アクチュエータにリフト減少方向の駆動トルクを一時的に付勢することを付与することを特徴とする。
第6の発明は、第1乃至第5の何れか1つの発明において、
前記アクチュエータの駆動トルクが回転角度によらず一定となるように、前記アクチュエータへ付与するデューティ値を学習する学習手段を更に備えたことを特徴とする。
前記アクチュエータの駆動トルクが回転角度によらず一定となるように、前記アクチュエータへ付与するデューティ値を学習する学習手段を更に備えたことを特徴とする。
第7の発明は、第1乃至第6の何れか1つの発明において、
前記内燃機関のアイドリング時における前記制御軸の回転角度域が、前記制御軸をリフト増大方向に付勢するコギングトルクが最も大きくなる角度域を含むように、前記制御軸と前記アクチュエータとの相対位相を補正する補正手段を更に備えることを特徴とする。
前記内燃機関のアイドリング時における前記制御軸の回転角度域が、前記制御軸をリフト増大方向に付勢するコギングトルクが最も大きくなる角度域を含むように、前記制御軸と前記アクチュエータとの相対位相を補正する補正手段を更に備えることを特徴とする。
脈動するコギングトルクの付勢方向が制御軸の回転方向から反対方向へ切り替わる安定位置は、該コギングトルクが制御軸の位置ずれを妨げる方向に付勢される。第1の発明によれば、内燃機関の停止時に、アクチュエータを駆動して制御軸を回転角度域に回転させる場合に、安定位置を含む停止回転角度域に回転される。このため、本発明によれば、コギングトルクを利用して、制御軸を効果的に保持することができる。
第2の発明によれば、内燃機関の停止時に、アクチュエータを駆動して制御軸を停止回転角度域に回転させる場合に、コギングトルクの谷側となる回転角度域に回転される。脈動するコギングトルクの谷側の位置は、アクチュエータの駆動トルクが小さくなる。このため、本発明によれば、コギングトルクを利用して、制御軸を効果的に保持することができる。
アクチュエータを駆動して制御軸を停止回転角度域に回転させる場合には、制御不感帯がある関係上、目標の回転角度域より手前側にずれることも想定される。第3の発明によれば、内燃機関の停止時に制御軸を所定の回転角度域に停止させる場合に、該制御軸がリフト増大方向に回転されて所定の回転角度域に停止される。このため、本発明によれば、所定の回転角度域よりも小リフト側の角度域にずれたとしても、かかる角度域はコギングトルクの谷側に位置する角度域であるため、制御軸を効果的に保持することができる。
第4の発明によれば、内燃機関の停止時に制御軸を所定の回転角度域に回転させた後、アクチュエータ駆動トルク(保持トルク)が徐々に減少される。制御軸を所定の回転角度域へ回転させた後に、アクチュエータの駆動トルクを突然オフにすると、停止位置によっては安定位置方向へ回転した制御軸がフリクションによる停止範囲を超えて回り続けてしまうおそれがある。このため、本発明によれば、駆動トルクを徐々に減少させることができるので、制御軸が停止範囲を越えて回転してしまう事態を効果的に回避することができる。
第5の発明によれば、内燃機関の停止時に制御軸を所定の回転角度域に回転させた後、制御軸にリフト減少方向の駆動トルクが一時的に付勢される。このため、本発明によれば、制御軸が不安定な位置で停止していた場合に、当該制御軸を安定位置へ回転させることができる。また、制御軸はリフト減少方向に付勢されているため、小さなトルクで制御軸を回転させることができる。
第6の発明によれば、アクチュエータの駆動トルクが回転角度によらず一定となるように、すなわちコギングトルクによる駆動トルクの脈動が平滑化されるように該アクチュエータへ付与するデューティ値が学習される。このため、本発明によれば、回転角度によって締め込み位置やたわみ量が変化してしまう事態を効果的に回避することができる。
第7の発明によれば、内燃機関のアイドリング時における制御軸の回転角度域がコギングトルクの谷側となるように、制御軸とアクチュエータとの相対位相が補正される。このため、本発明によれば、駆動トルクがコギングトルクにより有効にサポートされるので、アクチュエータの消費電力を低減するとともに、該アクチュエータの電磁音を低減することができる。
以下、図面に基づいてこの発明のいくつかの実施の形態について説明する。尚、各図において共通する要素には、同一の符号を付して重複する説明を省略する。また、以下の実施の形態によりこの発明が限定されるものではない。
実施の形態1.
[実施の形態1の構成]
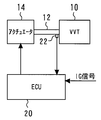
図1は、本実施の形態のシステム構成を説明するための全体構成図を示している。この図に示すように、本実施の形態のシステムは、可変動弁機構(VVT)10を備えている。可変動弁機構10は、例えば、後述する制御軸12の回転角に応じて、ロッカーアーム(図示せず)の揺動量や揺動タイミングを変化させて、リフト量、作用角、バルブタイミングといったバルブの開弁特性を連続的に変更できるように構成されている。具体的には、本実施の形態における可変動弁機構10は、例えば、特開2007−262965号公報等に記載されているような公知の技術を用いて構成されている。
[実施の形態1の構成]
図1は、本実施の形態のシステム構成を説明するための全体構成図を示している。この図に示すように、本実施の形態のシステムは、可変動弁機構(VVT)10を備えている。可変動弁機構10は、例えば、後述する制御軸12の回転角に応じて、ロッカーアーム(図示せず)の揺動量や揺動タイミングを変化させて、リフト量、作用角、バルブタイミングといったバルブの開弁特性を連続的に変更できるように構成されている。具体的には、本実施の形態における可変動弁機構10は、例えば、特開2007−262965号公報等に記載されているような公知の技術を用いて構成されている。
また、図1に示すとおり、本実施の形態の可変動弁機構10は、制御軸12を備えている。制御軸12は、バルブ反力等によって小リフト方向に付勢されている。また、可変動弁機構10には、制御軸12を任意の角度に回転駆動するためのモータ14が付設されている。モータ14は、固有のコギングトルクを有するモータとして構成されている。また、制御軸12には、該制御軸の回転角を検知するための回転角センサ22が設けられている。
また、本実施の形態のシステムは、その制御装置として、ECU(Electronic Control Unit)20が備えられている。ECU20は、内燃機関の運転状態などに基づいて、最適なリフト量を特定する他、当該リフト量を実現するためのモータ14の回転角制御等を実行する。
[実施の形態1における動作]
(コギングトルクについて)
モータ14の駆動トルクにはコギングトルクが含まれている。より具体的には、コギングトルクは、モータ内の電機子と回転子との磁気的吸引力が回転角度に依存して細かく脈動することにより発生するトルクである。図2は、モータの回転角度とトルクとの関係を示す図である。この図に示すとおり、コギングトルクを含む駆動トルクは、回転角度に依存して上下に脈動している。ここで、図2に示すとおり、モータ14や可変動弁機構10におけるフリクションによるトルクが発生していると仮定すると、駆動トルクがフリクショントルクよりも小さい角度域では、モータ14の回転軸、すなわち制御軸12を保持することができることとなる。
(コギングトルクについて)
モータ14の駆動トルクにはコギングトルクが含まれている。より具体的には、コギングトルクは、モータ内の電機子と回転子との磁気的吸引力が回転角度に依存して細かく脈動することにより発生するトルクである。図2は、モータの回転角度とトルクとの関係を示す図である。この図に示すとおり、コギングトルクを含む駆動トルクは、回転角度に依存して上下に脈動している。ここで、図2に示すとおり、モータ14や可変動弁機構10におけるフリクションによるトルクが発生していると仮定すると、駆動トルクがフリクショントルクよりも小さい角度域では、モータ14の回転軸、すなわち制御軸12を保持することができることとなる。
(機関停止時のVVT制御)
次に、機関停止時のVVT制御について説明する。内燃機関の運転中においては、所望のリフト量が実現されるように、制御軸12の回転角が、例えば100°〜260°の範囲で制御されている。ここで、内燃機関を停止する場合には、次回の始動時に備えて、始動性の良好な回転角度(例えば、200°)に設定しておくことが好ましい。そこで、本実施の形態のシステムでは、内燃機関のIGがオフにされる場合に、モータ14を駆動して、制御軸12を所定の回転角度に回転させることとしている。
次に、機関停止時のVVT制御について説明する。内燃機関の運転中においては、所望のリフト量が実現されるように、制御軸12の回転角が、例えば100°〜260°の範囲で制御されている。ここで、内燃機関を停止する場合には、次回の始動時に備えて、始動性の良好な回転角度(例えば、200°)に設定しておくことが好ましい。そこで、本実施の形態のシステムでは、内燃機関のIGがオフにされる場合に、モータ14を駆動して、制御軸12を所定の回転角度に回転させることとしている。
しかしながら、内燃機関の停止時に制御軸12を所定の回転角度に回転させたとしても、モータ14への通電をオフにした場合に、当該回転角度を保持できるとは限らない。図3は、モータ14への通電をオフにした場合のモータの回転角度と駆動トルクとの関係を説明するための図である。尚、この図において、θ1およびθ4は制御軸12の位置ずれを助長する方向にコギングトルクが作用する不安定点を、θ2は制御軸12の位置ずれを妨げる方向にコギングトルクが作用する安定点を、それぞれ示している。また、θ3は、図3中のAの面積、つまり、θ1〜θ2間に制御軸12に作用するトルクの積分値と、Bの面積、つまり、θ2〜θ3間に制御軸12に作用するトルクの積分値とが等しくなる回転角度を示している。
この図に示すとおり、モータ回転角度がθ1〜θ2の角度域では、フリクションによるトルクがコギングトルクよりも大きくなっている。このため、かかる角度域においてモータ14への通電がオフにされた場合には、制御軸12は回転されずにその回転角度で停止することができる。以下、この角度域を「安定域」と称する。
一方、回転角度がθ2〜θ3の角度域については、コギングトルクがフリクションによるトルクよりも大きくなっている。ここで、上述したとおり、θ3は、θ2〜θ3の制御軸12のトルク積分値が、安定域におけるそれと同等となる回転角度を示している。したがって、かかる角度域においてモータ14への通電がオフにされた場合には、制御軸12は、安定点であるθ2の方向に回転して安定域内で停止する。以下、この角度域を「回転後安定域」と称する。
更に、回転角度がθ3〜θ4の角度域については、条件付安定域と同様に、コギングトルクがフリクションによるトルクよりも大きくなっている。かかる角度域においてモータ14への通電がオフにされた場合には、制御軸12は、安定点であるθ2の方向に回転する。しかしながら、かかる角度域から回転した制御軸12は、安定域で停止せずに小リフト方向に回転し続けてしまう。以下、この角度域を「不安定域」と称する。
このように、内燃機関の停止時における制御軸12の回転角度が、安定域、回転後安定域、および不安定域の何れに属しているかによって、モータ14への通電をオフにした場合の制御軸12の保持特性が異なることとなる。そこで、本実施の形態では、内燃機関の停止時における制御軸12の回転角度が、安定域または回転後安定域に属するように、該制御軸12の回転角度を制御することとする。
図4は、モータ14の回転角度とセンサカウンタとの関係を示す図である。この図に示すとおり、制御軸12の回転角度は、回転角センサ22によって検出されるセンサカウンタに基づいて制御される。このため、制御軸12の回転角度は、各カウンタの角度域(例えば3.75°)の幅をもって制御されることとなる。更に、この図に示すとおり、制御不感帯を考慮すると、狙いのセンサカウンタから前後1つ程度ずれることを考慮する必要がある。
そこで、本実施の形態では、制御軸12を停止可能な角度域、すなわち、安定域と回転後安定域とで構成される角度域の中間部に位置するセンサカウンタを停止位置の狙いとして設定することとする。これにより、制御不感帯を考慮したとしても、停止位置の大半を安定域或いは回転後安定域にすることができる。
(実施の形態1の具体的処理)
次に、図5を参照して、内燃機関の停止時におけるVVT制御の具体的処理について説明する。図5は、内燃機関の停止時のVVT動作を示すタイミングチャートである。先ず、この図の(1)に示すとおり、IGがオフとされると、モータ14のデューティ値を制御して、制御軸12を所定のセンサカウンタまで回転させる処理が実行される。所定のセンサカウンタは、上述したように、安定域と回転後安定域とで構成される角度域の中間部に位置するセンサカウンタが設定される。尚、制御軸12の回転角度を制御する場合においては、設定されたセンサカウンタか、或いはこれより1つ手前のセンサカウンタになることが多い。このため、ここでは、大リフト方向へ制御軸12を回転させて所定のセンサカウンタを実現することが好ましい。これにより、制御軸12が1つ手前のセンサカウンタで停止したとしても、安定域に停止させることができる。
次に、図5を参照して、内燃機関の停止時におけるVVT制御の具体的処理について説明する。図5は、内燃機関の停止時のVVT動作を示すタイミングチャートである。先ず、この図の(1)に示すとおり、IGがオフとされると、モータ14のデューティ値を制御して、制御軸12を所定のセンサカウンタまで回転させる処理が実行される。所定のセンサカウンタは、上述したように、安定域と回転後安定域とで構成される角度域の中間部に位置するセンサカウンタが設定される。尚、制御軸12の回転角度を制御する場合においては、設定されたセンサカウンタか、或いはこれより1つ手前のセンサカウンタになることが多い。このため、ここでは、大リフト方向へ制御軸12を回転させて所定のセンサカウンタを実現することが好ましい。これにより、制御軸12が1つ手前のセンサカウンタで停止したとしても、安定域に停止させることができる。
次に、この図の(2)に示すとおり、制御軸12が所定のセンサカウンタで停止した後は、モータ14の駆動トルク(保持トルク)を徐々に小さくするために、デューティ値を徐変する処理が実行される。図6はコギングトルクと保持トルクとの関係を説明するための図である。デューティ値をいきなり0%へ変化させると、保持トルクとフリクションとの差が大きいため、制御軸12の回転を加速させる原因となる。そこで、この図に示すとおり、デューティ値を例えば、2%から徐々に低下させることとする。これにより、制御軸12が徐々に回転することとなるため、確実に安定域で停止させることができる。
また、この図の(3)に示すとおり、上記デューティ値の徐変制御を実行中に、制御軸12が必要以上に回転し始めた場合には、デューティ値を一時的に増大させることが好ましい。これにより、制御軸12が不安定域へ回転してしまう事態を効果的に回避することが可能となる。
上記処理によってデューティ値が0にされると、制御軸12は安定域で停止する。しかしながら、場合によっては、制御軸12が不安定域や回転後安定域の途中で停止していることも考えられる。そこで、この図の(4)に示すとおり、ここでは、モータ14へ一時的にマイナスデューティをかけることとする。これにより、制御軸12が不安定な位置に停止していた場合に、該制御軸12を安定域へ回転させて停止させることができる。また、制御軸12は、バルブ反力等によって小リフト側に付勢されている。このため、マイナスデューティをかけて小リフト側に駆動トルクを付勢することにより、小さな駆動トルクで制御軸12を安定域まで回転させることができる。尚、この図に示すとおり、マイナスデューティ処理は、小さなマイナスデューティを複数回かけることが好ましい。
以上説明した通り、本実施の形態のシステムによれば、内燃機関を停止する際に、モータ14のコギングトルクを利用して、制御軸12を所定の回転角度域で停止させることができる。これにより、次回始動時の始動性を確保することができる。
尚、上述した実施の形態1においては、可変動弁機構10が前記第1の発明における「可変動弁装置」に、モータ14が前記第1の発明における「アクチュエータ」に、それぞれ相当している。
実施の形態2.
[実施の形態2の特徴]
上述した実施の形態1において、モータ14のコギングトルクを大きくすると、コギングトルクの谷側、すなわち安定域における安定性を向上させることができる。しかしながら、その一方において、コギングトルクが大きいと、可変動弁機構10の可変モードにおいて、制御軸12の回転トルクに脈動が重畳してトルクが安定しない問題が生じる。つまり、制御軸12の回転角度によって、同一のデューティ値でも回転トルクが異なることとなるため、制御軸12の締め込み位置やたわみ量にバラツキが発生してしまうおそれがある。
[実施の形態2の特徴]
上述した実施の形態1において、モータ14のコギングトルクを大きくすると、コギングトルクの谷側、すなわち安定域における安定性を向上させることができる。しかしながら、その一方において、コギングトルクが大きいと、可変動弁機構10の可変モードにおいて、制御軸12の回転トルクに脈動が重畳してトルクが安定しない問題が生じる。つまり、制御軸12の回転角度によって、同一のデューティ値でも回転トルクが異なることとなるため、制御軸12の締め込み位置やたわみ量にバラツキが発生してしまうおそれがある。
そこで、本実施の形態では、コギングトルクの脈動を抑制するように、制御デューティ値の学習を実行することとする。図8は、コギングトルクと学習時の制御デューティ値との関係を説明するための図である。この図に示すとおり、コギングトルク脈動が平滑化されるように、学習時のデューティ値(学習デューティ値)を変化させることとする。これにより、モータ14の出力としての回転トルクを一定に制御することができる。
実施の形態3.
[実施の形態3の特徴]
上述した実施の形態1において、モータ14のコギングトルクを大きくすると、コギングトルクの谷側、すなわち安定域における安定性を向上させることができる。しかしながら、その一方において、コギングトルクが大きいと、コギングの山側における保持デューティ値が大きくなってしまう。特に、可変動弁機構10が可変モードに入る前の内燃機関の始動時(アイドリング時)においては、制御軸12が所定の大リフト側の回転角度(例えば240°)で保持される。このため、かかる回転角度がコギングトルクの山側に位置してしまうと、保持デューティ値が大きいことによる消費電力の増大や電磁音の増大が問題となってしまう。
[実施の形態3の特徴]
上述した実施の形態1において、モータ14のコギングトルクを大きくすると、コギングトルクの谷側、すなわち安定域における安定性を向上させることができる。しかしながら、その一方において、コギングトルクが大きいと、コギングの山側における保持デューティ値が大きくなってしまう。特に、可変動弁機構10が可変モードに入る前の内燃機関の始動時(アイドリング時)においては、制御軸12が所定の大リフト側の回転角度(例えば240°)で保持される。このため、かかる回転角度がコギングトルクの山側に位置してしまうと、保持デューティ値が大きいことによる消費電力の増大や電磁音の増大が問題となってしまう。
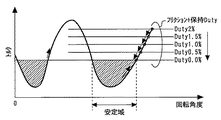
そこで、本実施の形態では、アイドリング時の制御軸12(モータ14)の回転角度がコギングトルクの谷側に位置するように、原点学習を実行することとする。図7は、制御軸12の回転角度とコギングトルクとの関係を説明するための図である。この図に示すとおり、コギングトルクの山側では保持デューティ値が増大し、谷側では減少する。そこで、この図に示すとおり、アイドリング時の制御軸12の回転角度がコギングトルクの谷側となるように、モータ14の回転角度と制御軸12の回転角度との相対位相を調整することとする。これにより、保持デューティ値を低減することができるので、消費電力や電磁音の増大を効果的に抑止することができる。
10 可変動弁機構
12 制御軸
14 モータ
20 ECU(Electronic Control Unit)
22 回転角センサ
12 制御軸
14 モータ
20 ECU(Electronic Control Unit)
22 回転角センサ
Claims (7)
- 内燃機関のバルブのリフト量を可変に設定するための制御軸を有し、前記制御軸をリフト増大方向へ回転させることによって前記リフト量が増大し、前記制御軸をリフト減少方向へ回転させることによって前記リフト量が減少する可変動弁装置と、
前記バルブに作用するバルブ反力で、前記制御軸をリフト減少方向へ付勢するバルブ反力付勢機構と、
前記制御軸を所定の回転角度域へ回転させるアクチュエータと、
前記内燃機関の停止時に、前記アクチュエータを駆動して前記制御軸を所定の回転角度域へ回転させる停止時制御手段と、を備え、
前記制御軸に付勢される前記アクチュエータの駆動トルクは、前記制御軸の回転角度に応じて脈動するコギングトルクを含み、
前記停止時制御手段は、前記コギングトルクの付勢方向が該制御軸の回転方向から反対方向へ切り替わる位置(以下、安定位置)を含む回転角度域へ前記制御軸を回転させることを特徴とする内燃機関の制御装置。 - 前記停止制御手段は、前記制御軸を前記コギングトルクの谷側となる回転角度域へ前記制御軸を回転させることを特徴とする請求項1記載の内燃機関の制御装置。
- 前記停止制御手段は、前記制御軸をリフト増大方向へ回転させて、前記停止回転角度域へ前記制御軸を回転させることを特徴とする請求項1または2記載の内燃機関の制御装置。
- 前記停止制御手段は、前記停止回転角度域へ前記制御軸を回転させた後に、前記アクチュエータの駆動トルクを徐々に減少させることを特徴とする請求項1乃至3の何れか1項記載の内燃機関の制御装置。
- 前記停止制御手段は、前記停止回転角度域へ前記制御軸を回転させた後に、前記アクチュエータにリフト減少方向の駆動トルクを一時的に付勢することを付与することを特徴とする請求項1乃至3の何れか1項記載の内燃機関の制御装置。
- 前記アクチュエータの駆動トルクが回転角度によらず一定となるように、前記アクチュエータへ付与するデューティ値を学習する学習手段を更に備えたことを特徴とする請求項1乃至5の何れか1項記載の内燃機関の制御装置。
- 前記内燃機関のアイドリング時における前記制御軸の回転角度域が、前記制御軸をリフト増大方向に付勢するコギングトルクが最も大きくなる角度域を含むように、前記制御軸と前記アクチュエータとの相対位相を補正する補正手段を更に備えることを特徴とする請求項1乃至6の何れか1項記載の内燃機関の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008321947A JP2010144596A (ja) | 2008-12-18 | 2008-12-18 | 内燃機関の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008321947A JP2010144596A (ja) | 2008-12-18 | 2008-12-18 | 内燃機関の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010144596A true JP2010144596A (ja) | 2010-07-01 |
Family
ID=42565284
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008321947A Withdrawn JP2010144596A (ja) | 2008-12-18 | 2008-12-18 | 内燃機関の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010144596A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014178118A1 (ja) * | 2013-04-30 | 2014-11-06 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2017175777A (ja) * | 2016-03-23 | 2017-09-28 | 株式会社デンソー | 電子制御装置 |
-
2008
- 2008-12-18 JP JP2008321947A patent/JP2010144596A/ja not_active Withdrawn
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014178118A1 (ja) * | 2013-04-30 | 2014-11-06 | トヨタ自動車株式会社 | 車両制御装置 |
| KR20150138292A (ko) * | 2013-04-30 | 2015-12-09 | 도요타지도샤가부시키가이샤 | 차량 제어 장치 |
| CN105209308A (zh) * | 2013-04-30 | 2015-12-30 | 丰田自动车株式会社 | 车辆控制装置 |
| JP6028855B2 (ja) * | 2013-04-30 | 2016-11-24 | トヨタ自動車株式会社 | 車両制御装置 |
| KR101682326B1 (ko) | 2013-04-30 | 2016-12-05 | 도요타지도샤가부시키가이샤 | 차량 제어 장치 |
| US10208815B2 (en) | 2013-04-30 | 2019-02-19 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device |
| JP2017175777A (ja) * | 2016-03-23 | 2017-09-28 | 株式会社デンソー | 電子制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4552902B2 (ja) | バルブタイミング調整装置 | |
| US8220426B2 (en) | Valve timing control device | |
| US20050076867A1 (en) | Valve controller | |
| JP6090178B2 (ja) | バルブタイミング調整装置 | |
| JP2010127192A (ja) | バルブタイミング調整装置 | |
| JP2000041372A (ja) | 直流トルクモ―タ、およびこれを用いた駆動制御装置、スロットル弁制御装置 | |
| JP2010144596A (ja) | 内燃機関の制御装置 | |
| JP2007285483A (ja) | 送りねじ機構を備えるアクチュエータ | |
| JP5598444B2 (ja) | 電動バルブタイミング可変装置 | |
| JP4888160B2 (ja) | 内燃機関の可変動弁装置 | |
| JP5907008B2 (ja) | バルブタイミング調整装置 | |
| JP5104983B2 (ja) | バルブタイミング調整装置 | |
| JP2011094581A (ja) | 電動式可変バルブタイミング装置の制御装置 | |
| JP6459886B2 (ja) | 電動バルブタイミング制御装置 | |
| JP2007198320A (ja) | 内燃機関の回転直線運動変換機構の制御装置 | |
| JPH11206092A (ja) | トルクモータ | |
| JP6436056B2 (ja) | エンジン制御装置 | |
| JP3241661B2 (ja) | ディーゼル機関の吸気絞り弁制御方法及び制御装置 | |
| JP2007162479A (ja) | 内燃機関のバルブ特性制御装置 | |
| JP2007288947A (ja) | 駆動装置及び同駆動装置を具備する内燃機関の可変動弁装置 | |
| JP2008215313A (ja) | バルブタイミング調整装置 | |
| JP2011205778A (ja) | ブラシレスモータおよびブラシ付きモータ | |
| JP6642350B2 (ja) | 電動バルブタイミング調整装置 | |
| JPH1162631A (ja) | ステップモ−タ駆動スロットル制御装置 | |
| JP2009062895A (ja) | バルブタイミング調整装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20110629 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A761 | Written withdrawal of application |
Effective date: 20120125 Free format text: JAPANESE INTERMEDIATE CODE: A761 |