JP2010143397A - 車両用サスペンション装置、電動モータの制御方法、及びアクチュエータ制御装置 - Google Patents
車両用サスペンション装置、電動モータの制御方法、及びアクチュエータ制御装置 Download PDFInfo
- Publication number
- JP2010143397A JP2010143397A JP2008322616A JP2008322616A JP2010143397A JP 2010143397 A JP2010143397 A JP 2010143397A JP 2008322616 A JP2008322616 A JP 2008322616A JP 2008322616 A JP2008322616 A JP 2008322616A JP 2010143397 A JP2010143397 A JP 2010143397A
- Authority
- JP
- Japan
- Prior art keywords
- compensation amount
- thrust
- speed
- stroke
- friction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Vehicle Body Suspensions (AREA)
Abstract
【解決手段】電動モータが発生する推力で車輪2の上下位置を規制する。その際に、推力指令値T1と実推力T0との偏差に応じたフィードバック補償量HF1とフリクション補償量HF2との2つの補償量で、上記電動モータへの推力指令値T1を補償する。このとき、上記推力指令値T1に対する上記2つの補償量を、サスペンションの上下ストローク速度VSに応じて変更する。
【選択図】 図3
Description
上記従来技術を電動モータでストローク制御する電動サスペンションに適用して、ストロークに伴うフリクション補償を実施した場合、制御時のサスペンションのストローク量や速度の変化の幅が大きく高周波領域も頻繁に利用するため、フリクションの補償が不足するおそれがある。
本発明は、上記のような点に着目してなされたもので、より適切にフリクションを補償可能な構成として、電動モータによる発生推力をより推力指令値に近い状態に制御可能とすることを課題とする。
(サスペンション装置)
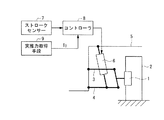
図1は、本実施形態に係るサスペンション装置を説明する模式図であり、車両前方から見た図である。本実施形態は、ダブルウィシュボーン式サスペンション形式を例示するものである。
車輪支持部材であるナックル1は、車輪2を回転自在に支持する。サスペンションリンクであるアッパアーム3及びロアアーム4は、上記ナックル1を車体5に対し上下揺動可能に連結する。そして、ショックアブソーバが、上記ロアアーム4と車体5との間に介装している。すなわち、ショックアブソーバは、その下端部をロアアーム4に連結すると共に、上端部を車体5に連結する。
また、ストロークセンサ7は、サスペンションの上下ストロークを検出する。ストロークセンサ7は、サスペンションの上下ストロークとして、上記電動アクチュエータ6のストロークや車輪2の上下ストロークを検出する。また、ロアアーム4などの上下揺動角などからサスペンションの上下ストロークを検出しても良い。ストロークセンサ7は、検出したストローク量をコントローラ8に出力する。
なお、図2に示すように、ショックアブソーバと共に、車両重量を支えるサスペンションスプリング23を設けていても良いし、サスペンションスプリング23は無くても良い。
次に、本実施形態における電動アクチュエータ6の構造について、図2を参照して説明する。
本実施形態では、駆動部である電動モータとしてリニアモータ12を採用した例である。
本電動アクチュエータ6は、図2に示すように、内筒10、外筒11、及びリニアモータ12を備える。外筒11は、例えば断面円形をした有底の筒体である。外筒11は、開放端部を下側に向けて配置してある。その外筒11内に内筒10の一部を進退可能に挿入する。内筒10の断面形状は、上記外筒11の内径面と同じ断面形状となっており、例えば断面円形となっている。
すなわち、上記複数の永久磁石12aを、内筒10の外径面に同軸に固定する。その複数の永久磁石12aは、内筒10の軸に沿って配列する。また、複数のコイル12bを、外筒11の内径面に固定する。その複数のコイル12bを、外筒11の軸に沿って配列する。なお、各コイル12bは鉄心を有する。そして、上記コイル12bに対し、供給電流(励磁電流)や供給電圧を推力指令値として供給する。これによって、電動アクチュエータ6は、軸方向に推力を発生する。本実施形態では、供給電圧を推力指令値とする。
ここで、内筒10内に粘性流体(油)を収容することで、機械的なダンパー機能を有していてもよい。また、上記滑り軸受からなるガイド16,17は、上記粘性流体が漏れることを防止したり、永久磁石12aに砂等が付着することを防止したりするシール機能の役割もある。
コントローラ8は、図3に示すように、推力指令演算部8A、推力補償部8B、及び供給電力調整部8Cを備える。
推力指令演算部8Aは、車両挙動を検出するセンサからの信号に基づき、車両の挙動を所定の状態に制御するためにアクチュエータで発生させる推力に応じた推力指令値T1を演算する。演算した推力指令値T1は、供給電力調整部8C及び推力補償部8Bに出力する。
推力フィードバック手段8Baは、まず、推力指令値T1と実際の推力である実推力T0とを入力する。次に、推力指令値T1と実推力T0との差分である推力偏差ΔTをフィードバック補償量HF1として求める。そして、フィードバック補償量HF1を補償量配分調整手段8Bdに出力する。
ΔT =K・(T1 −T0)
但し、Kはゲインである。
また、ストローク速度演算手段8Bbは、ストロークを微分することでストローク速度VSを演算し、演算したストローク速度VSを補償量配分調整手段8Bd及びフリクション補正手段8Bcに出力する。
フリクション補正手段8Bcは、サスペンションの上下ストローク方向を判断し、その分のフリクションであるフリクション補償量HF2を求める。求めたフリクション補償量HF2は補償量配分調整手段8Bdに出力する。
この処理は、所定のサンプリング周期で実施する。
まずステップS10にて、ストローク速度VSが超極低速域か否かを判定する。ストローク速度VSが超極低速である場合には、ステップS50に移行してフリクション補償量HF2をゼロとして復帰する。ストローク速度VSが超極低速でない場合にはステップS30に移行する。超極低速域とは、センサの感度に応じストローク方向の判断が困難と考えられるほど速度が遅い場合である。
ステップS30では、サスペンションの上下ストローク方向を算出する。ストローク方向の算出は、例えば次のように実施する。
過去Nサンプリング前のデータ中に略ゼロが存在せず、且つ複数回以上(例えば6回)同符号が連続しているか否かの判断を行う。上記判断に該当する場合には、ステップS40に移行する。上記判断に該当しない場合にはステップS50に移行する。
フリクション補償量HF2 =Ffric × Sign(ストローク速度VS)
Ffricは、サスペンションストロークの際において発生するフリクション定数である。Sign(ストローク速度VS)は符号関数であり、ストローク速度VSの符号によって「+」若しくは「−」となる。
また、ステップS50では、ストローク速度VSはゼロであると判断し、フリクション補償量HF2をゼロとする。
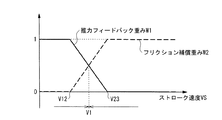
まず、ストローク速度VSに基づき推力フィードバック重みW1と、フリクション補償重みW2とを求める。
本実施形態では、推力フィードバック重みW1、及びフリクション補償重みW2を、図6に示すように、ストローク速度VSによって変更する。ここで、推力フィードバック重みW1、及びフリクション補償重みW2の和を、下記のように設定する。
W1 +W2 = 1
すなわち、ストローク速度VSが第1速度V1未満の場合には、推力フィードバック重みW1がフリクション補償重みW2よりも大きい。また、ストローク速度VSが第1速度V1以上の場合には、フリクション補償重みW2が推力フィードバック重みW1よりも大きくなるように設定している。
次に、ステップS110において、補償フィードバック補償量HF1に対し推力フィードバック重みW1で重み付けした第1の補償量H1を演算する。
第1の補償量H1=補償フィードバック補償量HF1×推力フィードバック重みW1
また、フィードバック補償量HF1に対しフリクション補償重みW2で重み付けした第2の補償量H2を演算する。
そして、ステップS130では、下記式のように、最終的な補償量Hを算出し、その算出した最終的な補償量Hで、推力指令値T1を補償する。
最終的な補償量H = 上記第1の補償量H1 +第2の補償量H2
そして、最終的な補償量Hによって、下記式のように、推力指令値T1を補償する。
T1 = T1 +H
そして、供給電力調整部8Cは、補償後の推力指令値T1を電力値に変換して電動アクチュエータ6のリニアモータ12に出力する。
基本的な制御動作は、次の通りである。すなわち、コントローラ8で、電動アクチュエータ6が発生すべき力である推力指令値T1を演算し、その演算した推力指令値T1を電圧に変換して電動アクチュエータ6に供給することで、電動アクチュエータ6を動作させる。
しかし、これだけでは電動アクチュエータ6自身のフリクションや、サスペンション部品の結合部のフリクション等によって、指令通りの力を発生してばね上の振動を抑制したら、車輪2の接地性を向上させることはできないおそれがある。
そして、最終的な推力の補償量Hについて、低速側(ストローク速度VS<V1)であれば、推力フィードバック重みW1が大きい事から、推力フィードバック補償量HF1の割合が大きくなる。一方、ストローク速度VSが第1速度V1を越えた高速側では、フリクション補償重み(W1)を高くすることで高速でのストローク方向の推測が可能となる。
図7に、その効果を示す。これは、ある高速加振条件で任意の推力を発生させて、その実推力T0と推力指令値T1と比較した結果である。なお、横軸は推力指令値T1、縦軸は実推力T0である。高周波な推力指令を与えた際、電動アクチュエータ6の推力発生時に遅れの特性があったり、フリクションが大きかったりした場合、指令に対して実際の推力は大幅に異なる値を示す。この図7は、制御指令に従い推力が発生出来ていれば、遅れやフリクションの影響を受けずに推力が発生できていることを意味している。
なお、上述の従来例のような操舵系に比べ、サスペンション装置の場合の方が、フリクションが大きい。そして、ストローク量やストローク速度VSに応じてフリクションが変動するため、すべての走行シーンにおいて、単に線形の外乱オブザーバーを適用することは出来ない。
ここで、推力フィードバック手段8Baは、推力フィードバック取得手段を構成する。フリクション補正手段8Bcは、フリクション補償量取得手段を構成する。補償量配分調整手段8Bdは、補償手段を構成する。供給電力調整部8Cは、制御量出力手段を構成する。リニアモータ12は、電動モータを構成する。
(1)実推力取得手段9は、電動モータが発生している実推力T0を検出若しくは推定して取得する。推力フィードバック取得手段は、電動モータへの推力指令値T1と上記実推力取得手段9が取得した実推力T0との偏差である推力偏差ΔTに応じたフィードバック補償量HF1を求める。フリクション補償量取得手段は、上記サスペンションの上下ストローク方向に基づきサスペンション装置で発生するフリクション分のフリクション補償量HF2を求める。補償手段は、上記ストローク速度VSに応じて、上記フィードバック補償量HF1及びフリクション補償量HF2の上記推力指令値T1に対する各補償量を変更する。
推力フィードバックとフリクション補償の長所を生かし、主として補償する量を、ストローク速度VSに応じて、推力フィードバック補償とフリクション補償の各補償量を変更する。これによって、速度依存が高いフリクションを補償し所望の推力を発生することが可能となる。
これによって、確実に、主として補償する量を、推力フィードバック補償とフリクション補償とのいずれかに切り替えることが出来るようになる。
ストローク速度VSが比較的に低くサスペンション特性をひとつの線形近似モデルで表現可能な領域においては、フリクション相当を補償することで、所望の推力を任意に発生することが可能となる。さらにストローク速度VSが比較的に高く低速領域で線形近似したモデルとの差異が大きくなってしまうような領域においては、フィードバック補償量HF1で主として補償することで、所望の推力を任意に発生することが可能となる。
この結果、低周波から高周波の振動領域までも電動モータにより制振効果を発揮することが可能となる。
これによって、サスペンションの上下ストロークを、電動アクチュエータ6のストロー得によって直接規制することが可能となる。
推力フィードバックとフリクション補償の長所を生かし、主として補償する量を、ストローク速度VSに応じて、推力フィードバック補償とフリクション補償を切り替えることが可能となる。これによって、速度依存が高いフリクションを補償し所望の推力を発生することが可能となる。
(1)上記実施形態では、電動モータとしてリニアモータ12を使用した直動型の電動アクチュエータ6を例示した。電動アクチュエータ6としては、次のような電動アクチュエータ6であっても良い。
すなわち、図8に示すように、電動モータが電動回転モータからなる直動型の電動アクチュエータ6であっても良い。
この場合には、回転モータ6aでボールねじ機構6bのねじ軸を軸回転させることで、回転運動を直進運動に変換するアクチュエータである。すなわち、電動アクチュエータ6は、回転式の電動モータ6aと、回転運動を直線運動に変換するボールねじ機構6bとからなる。そして、電動アクチュエータ6の上端部を車体5に連結する。また電動アクチュエータ6の下端部をロアアーム4に連結する。そして、回転モータ6aが発生する力により、ボールねじ機構6bが伸縮する。この結果、回転モータ6aが発生する回転力を車輪2上下方向の力に変換することで、ばね上の乗心地や車輪2接地性を自在に制御することが可能となる。
(3)サスペンション装置の基本とするサスペンション形式は、ウイッシュボーン形式に限定しない。他の形式のサスペンション形式であって良い。
次に、第2実施形態について図面を参照しつつ説明する。なお、第1実施形態と同様な装置などについて同一の符号を付して説明する。
本実施形態の基本構成は、上記第1実施形態と同様である。
但し、補償量配分調整手段8Bdにおける、ストローク速度VSに基づく、推力フィードバック重みW1と、フリクション補償重みW2との割合の変更の設定が若干、異なる。
すなわち、本実施形態では、推力フィード重みW1とフリクション補償重みW2とを、図9に示す重み付け特性としたものである。
第1実施形態での重み付け特性の差異は、極低速の条件においては推力フィードバックの重みを下げると共に、フリクション補償の重みを上げている。すなわち、第1速度V1よりも低速の第2速度V2より小さい場合には、フリクション補償重みW2の方を大きくする。
その他の構成は、上記実施形態と同様である。
推力フィードバックは、実際にロードセルなどの力を直接計測できるセンサによって実推力T0が明らかとなればまだ問題はない。しかし、実際の車両の動き(ばね上Gやストローク速度VSなど)の情報から発生する実推力T0を推測する場合には、次の課題がある。すなわち、推定した実推力T0を補償する外乱オブザーバーを用いた場合、ストローク速度VSが極低速の条件で電動アクチュエータ6が発生する実推力T0を推定するのは困難である。すなわち、極低速では、外乱オブザーバーの誤差が大きくなるため、所望の推力となるように制御することが困難となるおそれがある。そこで、極低速ではサスペンションのストローク速度VSによって方向を判断するフリクション補償で補償する方が有効となるので、フリクション補償重みW2の方を大きくする。
すなわち、2つの周波数(ローパス、ハイパス)で2つの信号を分離すると、信号の遅れや信号にノイズが乗る。これに鑑み、信号の遅れや信号にノイズが乗りやすいストローク速度VSについては、フィードバック補償量HF1を抑え、主としてフリクション補償量HF2で対応する。
(1)補償手段は、上記推力指令値T1に対する補償量として、上記ストローク速度VSが第1速度V1よりも低速である第2速度V2未満では、上記ストローク速度VSが低いほど、フィードバック補償量HF1の割合を減少すると共にフリクション補償量HF2の割合を増加する。
実推力T0を外乱オブザーバーで推測した場合には、極低速では外乱オブザーバーの誤差が大きくなる。このため、極低速では、フリクション補償量HF2の割合を増加する。
これにより、上屋の上下挙動が少なくばね上の加速度や、サスペンションのストロークが緩やかに変化するような状況に対しても、所望の推力を発生することが可能となる。
装置などについて同一の符号を付して説明する。
本実施形態の基本構成は、上記第1及び第2実施形態と同様である。
但し、補償量配分調整手段8Bdにおける、ストローク速度VSに基づく推力フィードバック重みW1とフリクション補償重みW2との割合との変更が異なる。
すなわち、本実施形態では、推力フィード重みW1及びフリクション補償重みW2を、図10に示す重み付け特性としたものである。
上記第2実施形態の重み付け特性との差異は、第1速度V1よりも大きな速度であるV3以上の超高速の条件においては、フリクション補償重みW2を速度が大きくなるほど小さく設定する。
その他の構成は、上記各実施形態と同様である。
フリクション補償は、サスペンションのストローク速度VSによって、その方向を判断し、フリクション相当を指令値に対し行う補償である。このフリクション補償は、サスペンションが高速で動き、その方向が刻々と変化する条件においては、ストローク方向の誤判定が発生しやすい。特に、インパルス的な入力が入った場合は、誤判定を招きやすい。このため、超高速の条件では推力フィードバックおよびフリクションの補償は行わないこととする。
(1)補償手段は、ストローク速度VSが第1速度V1よりも高速である第3速度V3以上では、上記推力指令値T1に対する補償量として、上記ストローク速度VSが大きいほど、上記フィードバック補償量HF1及びフリクション補償量HF2をともに小さく変更する。
フリクション補償すらも追従できないような超高速でストロークするような状況においては、補償量自体を小さくすることで、推力の誤差を小さく抑える。
次に、第4実施形態について図面を参照しつつ説明する。なお、上記各実施形態と同様な構成については同一の符号を付して説明する。
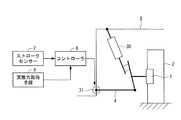
本実施形態は、ストラット形式のサスペンション装置に適用した場合の例である。
ナックル1の上端部と車体5との間にストラットを配置する。また、ナックル1を、ロアアーム4によって、上下揺動可能に車体5へ連結する。
そして、本実施形態では、ロアアーム4の車体5側端部を、回転式の電動モータを介して接続する。この電動モータは、ロアアーム4の軸に直行する略車両前後方向の軸周りに回転する。その回転力によって、ロアアーム4を車体5との連結部周りに回転させる構造とすることで、車輪2の上下位置を規制可能となっている。
その他の構成は、上記各実施形態と同様であり、同様な作用効果を奏する。
(1)直動型の電動アクチュエータ6の代わりに回転式の電動モータで、サスペンションリンクを上下に揺動させる。
これによって、ショックアブソーバに直動型の電動アクチュエータ6を使用する必要が無い。
2 車輪
3 アッパアーム
4 ロアアーム
5 車体
6 電動アクチュエータ
7 ストロークセンサ(ストローク速度検出手段)
8 コントローラ
8A 推力指令演算部
8B 推力補償部
8Ba 推力フィードバック手段(推力フィードバック取得手段)
8Bb 演算手段
8Bc フリクション補正手段(フリクション補償量取得手段)
8Bd 補償量配分調整手段(補償手段)
8C 供給電力調整部
9 実推力取得手段
10 内筒
11 外筒
12 リニアモータ(電動モータ)
12a 永久磁石
12b コイル
HF1 フィードバック補償量
HF2 フリクション補償量
H 最終的な補償量
H1 第1の補償量
H2 第2の補償量
T0 実推力
T1 推力指令値
VS ストローク速度
V1 第1速度
V2 第2速度
V3 第3速度
Claims (9)
- 電動モータの推力によって、軸方向変位であるストロークを発生する電動アクチュエータにより、車輪を車体に対して車両上下方向に変位させる車両用サスペンション装置であって、
上記ストロークの速度を検出するストローク速度検出手段と、
電動モータが発生している実推力を検出若しくは推定して取得する実推力取得手段と、
電動モータへの推力指令値と上記実推力取得手段が取得した実推力との偏差である推力偏差に応じたフィードバック補償量を求める推力フィードバック取得手段と、
上記ストローク方向に基づきサスペンション装置で発生するフリクション分のフリクション補償量を求めるフリクション補償量取得手段と、
電動モータへの上記推力指令値を、上記フィードバック補償量及びフリクション補償量で補償する補償手段と、
補償手段による補償後の推力指令値を上記電動モータに出力する制御量出力手段と、を備え、
上記補償手段は、上記ストロークの速度に応じて、上記フィードバック補償量及びフリクション補償量の上記推力指令値に対する各補償量を変更することを特徴とする車両用サスペンション装置。 - 上記補償手段は、上記フィードバック補償量及びフリクション補償量に対しそれぞれ重み付けを行い、その各重み付けを上記ストロークの速度に応じて変更することで、上記フィードバック補償量及びフリクション補償量の上記推力指令値に対する補償量の割合を変更することを特徴とする請求項1に記載した車両用サスペンション装置。
- 上記補償手段は、上記推力指令値に対する補償量として、ストロークの速度が第1速度未満では、フリクション補償量よりもフィードバック補償量の割合を大きくし、上記ストロークの速度が第1速度以上では、フィードバック補償量よりもフリクション補償量の割合を大きくすることを特徴とする請求項2に記載した車両用サスペンション装置。
- 上記補償手段は、上記推力指令値に対する補償量として、上記ストロークの速度が第1速度よりも低速である第2速度未満では、上記ストロークの速度が低いほど、フィードバック補償量の割合を減少すると共にフリクション補償量の割合を増加することを特徴とする請求項3に記載した車両用サスペンション装置。
- 上記補償手段は、上記ストロークの速度が第1速度よりも高速である第3速度以上では、上記推力指令値に対する補償量として、上記ストロークの速度が大きいほど、上記フィードバック補償量及びフリクション補償量をともに小さく変更することを特徴とする請求項3又は請求項4に記載した車両用サスペンション装置。
- 上記ストローク速度検出手段で検出する上記ストロークの速度は、上記電動アクチュエータの軸方向変位の速度、または、上記車輪の上下方向変位の速度であることを特徴とする請求項1〜請求項5のいずれか1項に記載した車両用サスペンション装置。
- 電動モータの推力によって、軸方向変位であるストロークを発生する電動アクチュエータにより、車輪を車体に対して車両上下方向に変位させる車両用サスペンション装置における上記電動モータの制御方法であって、
電動モータへの推力指令値と電動モータの実推力との偏差に応じたフィードバック補償量と、上記ストローク方向に基づくフリクション補償量とで、上記電動モータへの推力指令値を補償し、
上記フィードバック補償量とフリクション補償量の上記推力指令値に対する補償量の割合を、上記ストロークの速度に応じて変更することを特徴とする電動モータの制御方法。 - 上記ストロークの速度は、上記電動アクチュエータの軸方向変位の速度、または、上記車輪の上下方向変位の速度であることを特徴とする請求項7に記載した電動モータの制御方法。
- 電動モータを駆動部として軸方向にストローク可能な電動アクチュエータを力制御するアクチュエータ制御装置であって、
電動アクチュエータのストローク速度を検出する速度検出手段と、
電動アクチュエータで発生している実推力を検出若しくは推定して取得する実推力取得手段と、
電動アクチュエータへの推力指令値と実推力取得手段が取得した実推力との偏差である推力偏差に応じたフィードバック補償量を求める推力フィードバック取得手段と、
電動アクチュエータのストローク方向を判定してフリクション分のフリクション補償量を求めるフリクション補償量取得手段と、
電動アクチュエータへの推力指令値を、上記フィードバック補償量及びフリクション補償量で補償する補償手段と、を備え、
上記補償手段は、上記フィードバック補償量及びフリクション補償量に対しそれぞれ重み付けを行い、その各重み付けを上記ストローク速度に応じて変更することで、上記推力指令値に対する、上記フィードバック補償量とフリクション補償量との補償の割合を変更することを特徴とするアクチュエータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322616A JP5369662B2 (ja) | 2008-12-18 | 2008-12-18 | 車両用サスペンション装置、電動モータの制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322616A JP5369662B2 (ja) | 2008-12-18 | 2008-12-18 | 車両用サスペンション装置、電動モータの制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010143397A true JP2010143397A (ja) | 2010-07-01 |
| JP5369662B2 JP5369662B2 (ja) | 2013-12-18 |
Family
ID=42564275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008322616A Expired - Fee Related JP5369662B2 (ja) | 2008-12-18 | 2008-12-18 | 車両用サスペンション装置、電動モータの制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5369662B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014230400A (ja) * | 2013-05-22 | 2014-12-08 | 日産自動車株式会社 | 車両挙動制御装置及び車両挙動制御方法 |
| JP2020142553A (ja) * | 2019-03-04 | 2020-09-10 | トヨタ自動車株式会社 | 車両用サスペンション装置 |
| WO2023181521A1 (ja) * | 2022-03-21 | 2023-09-28 | 日立Astemo株式会社 | 制御装置、車両挙動制御装置および力発生機構システム |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0417591A (ja) * | 1990-05-09 | 1992-01-22 | Mitsubishi Heavy Ind Ltd | サーボ制御装置 |
| JPH04159117A (ja) * | 1990-10-24 | 1992-06-02 | Kayaba Ind Co Ltd | 油圧回路の制御方法 |
| JPH10226347A (ja) * | 1997-02-12 | 1998-08-25 | Honda Motor Co Ltd | 車両の操舵装置 |
| JPH1165677A (ja) * | 1997-08-26 | 1999-03-09 | Mitsubishi Heavy Ind Ltd | 電機油圧式振動台のアクチュエータ制御方法及び装置 |
| JP2002029437A (ja) * | 2000-07-13 | 2002-01-29 | Nissan Motor Co Ltd | 車両の車線追従制御装置 |
| JP2002227927A (ja) * | 2001-01-31 | 2002-08-14 | Tokico Ltd | 電磁サスペンション装置 |
| JP2003081119A (ja) * | 2001-09-14 | 2003-03-19 | Mazda Motor Corp | 自動車の電動パワーステアリング装置 |
| JP2005088610A (ja) * | 2003-09-12 | 2005-04-07 | Toyota Central Res & Dev Lab Inc | 車両用操舵装置 |
| JP2005223163A (ja) * | 2004-02-06 | 2005-08-18 | Hitachi High-Technologies Corp | ステージ制御装置,ステージ制御方法、および製造装置 |
-
2008
- 2008-12-18 JP JP2008322616A patent/JP5369662B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0417591A (ja) * | 1990-05-09 | 1992-01-22 | Mitsubishi Heavy Ind Ltd | サーボ制御装置 |
| JPH04159117A (ja) * | 1990-10-24 | 1992-06-02 | Kayaba Ind Co Ltd | 油圧回路の制御方法 |
| JPH10226347A (ja) * | 1997-02-12 | 1998-08-25 | Honda Motor Co Ltd | 車両の操舵装置 |
| JPH1165677A (ja) * | 1997-08-26 | 1999-03-09 | Mitsubishi Heavy Ind Ltd | 電機油圧式振動台のアクチュエータ制御方法及び装置 |
| JP2002029437A (ja) * | 2000-07-13 | 2002-01-29 | Nissan Motor Co Ltd | 車両の車線追従制御装置 |
| JP2002227927A (ja) * | 2001-01-31 | 2002-08-14 | Tokico Ltd | 電磁サスペンション装置 |
| JP2003081119A (ja) * | 2001-09-14 | 2003-03-19 | Mazda Motor Corp | 自動車の電動パワーステアリング装置 |
| JP2005088610A (ja) * | 2003-09-12 | 2005-04-07 | Toyota Central Res & Dev Lab Inc | 車両用操舵装置 |
| JP2005223163A (ja) * | 2004-02-06 | 2005-08-18 | Hitachi High-Technologies Corp | ステージ制御装置,ステージ制御方法、および製造装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014230400A (ja) * | 2013-05-22 | 2014-12-08 | 日産自動車株式会社 | 車両挙動制御装置及び車両挙動制御方法 |
| JP2020142553A (ja) * | 2019-03-04 | 2020-09-10 | トヨタ自動車株式会社 | 車両用サスペンション装置 |
| JP7099366B2 (ja) | 2019-03-04 | 2022-07-12 | トヨタ自動車株式会社 | 車両用サスペンション装置 |
| WO2023181521A1 (ja) * | 2022-03-21 | 2023-09-28 | 日立Astemo株式会社 | 制御装置、車両挙動制御装置および力発生機構システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5369662B2 (ja) | 2013-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10471788B2 (en) | Electromagnetic suspension apparatus | |
| JP5628811B2 (ja) | 直線出力を伴った対向回転モータを備えたアクチュエータ | |
| JP6417443B1 (ja) | 電磁サスペンション装置 | |
| US7665585B2 (en) | Vehicle suspension system and method for operating | |
| US7270335B2 (en) | Electromagnetic suspension apparatus for automotive vehicles and method for controlling electric motor of the same | |
| JP5157861B2 (ja) | 電磁アクチュエータ装置および電磁アクチュエータの制御方法 | |
| KR101198800B1 (ko) | 자동차의 액티브 롤 제어장치 | |
| US11377003B2 (en) | Suspension system, preferably driver seat | |
| JP2009179106A (ja) | 車両用サスペンションシステム | |
| US10160283B2 (en) | Electromagnetic damper system | |
| JP5369662B2 (ja) | 車両用サスペンション装置、電動モータの制御方法 | |
| US20190366791A1 (en) | Electromagnetic suspension apparatus | |
| US20160159185A1 (en) | Electromagnetic damper | |
| JP2009234323A (ja) | 車両用サスペンションシステム | |
| US10857848B2 (en) | Electromagnetic suspension device | |
| JP6993450B2 (ja) | 電動サスペンション装置 | |
| US20130154208A1 (en) | Suspension system and method of varying a stiffness of a suspension of a vehicle | |
| US12036836B2 (en) | Electrically powered suspension system | |
| JP2009234472A (ja) | 電磁サスペンションユニットおよび電磁サスペンション装置 | |
| JP2012076682A (ja) | サスペンション装置 | |
| JP4142551B2 (ja) | 車両懸架装置 | |
| JP2010006343A (ja) | 車両用サスペンションシステム | |
| JP2012179970A (ja) | サスペンション制御装置 | |
| JP4872782B2 (ja) | 車両用サスペンションシステム | |
| JP2013112313A (ja) | 減衰力調整式シリンダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100917 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130326 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130820 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130902 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |