JP2010057357A - リニアモータアクチュエータ及び多軸リニアモータアクチュエータ - Google Patents
リニアモータアクチュエータ及び多軸リニアモータアクチュエータ Download PDFInfo
- Publication number
- JP2010057357A JP2010057357A JP2009178165A JP2009178165A JP2010057357A JP 2010057357 A JP2010057357 A JP 2010057357A JP 2009178165 A JP2009178165 A JP 2009178165A JP 2009178165 A JP2009178165 A JP 2009178165A JP 2010057357 A JP2010057357 A JP 2010057357A
- Authority
- JP
- Japan
- Prior art keywords
- shaft member
- linear motor
- rod
- axial direction
- motor actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005096 rolling process Methods 0.000 claims description 44
- 230000002093 peripheral effect Effects 0.000 claims description 23
- 239000000463 material Substances 0.000 description 11
- 238000010791 quenching Methods 0.000 description 8
- 230000000171 quenching effect Effects 0.000 description 8
- 229910000831 Steel Inorganic materials 0.000 description 6
- 239000010959 steel Substances 0.000 description 6
- 239000000758 substrate Substances 0.000 description 6
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 4
- 229910001315 Tool steel Inorganic materials 0.000 description 4
- 229910052799 carbon Inorganic materials 0.000 description 4
- 239000011796 hollow space material Substances 0.000 description 4
- 230000002265 prevention Effects 0.000 description 4
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 125000006850 spacer group Chemical group 0.000 description 4
- 230000003746 surface roughness Effects 0.000 description 4
- 230000000052 comparative effect Effects 0.000 description 3
- 230000001788 irregular Effects 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000001125 extrusion Methods 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000001746 injection moulding Methods 0.000 description 2
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 206010044565 Tremor Diseases 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000036316 preload Effects 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/18—Machines moving with multiple degrees of freedom
Landscapes
- Linear Motors (AREA)
Abstract
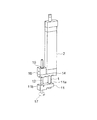
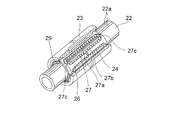
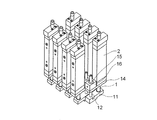
【解決手段】リニアモータのロッド1に平行に第二の軸部材12を配置する。ロッド1の直線運動に連れて第二の軸部材12が直線運動するように、ロッド1の先端部と第二の軸部材12の先端部とを第一の連結部材11で連結する。第二の連結部材14は、第二の軸部材12が直線運動できるように第二の軸部材12とハウジング2とを連結し、ロッド1の軸線の回りを第二の軸部材12が旋回するのを防止する。
【選択図】図1
Description
Claims (9)
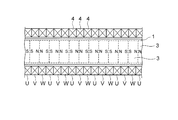
- 複数のマグネットを有し、軸線方向にN極及びS極が交互に形成される第一の軸部材と、
前記第一の軸部材を囲み、前記第一の軸部材の軸線方向に積層される複数のコイルと、
前記複数のコイルが収容されるハウジングと、
前記第一の軸部材と平行に配置される第二の軸部材と、
前記ハウンジングに対して前記第一の軸部材がその軸線方向に直線運動するのに連れて、前記第二の軸部材がその軸線方向に直線運動するように、前記第一の軸部材と前記第二の軸部材を連結する第一の連結部材と、
前記第二の軸部材がその軸線方向に直線運動できるように前記第二の軸部材と前記ハウジングとを連結すると共に、前記第一の軸部材の軸線の回りを前記第二の軸部材が旋回するのを防止する第二の連結部材と、を備えるリニアモータアクチュエータ。 - 前記ハウジングに対して前記第一の軸部材がその軸線の回りを回転できないように、前記第一の軸部材が前記第一の連結部材に固定されることを特徴とする請求項1に記載のリニアモータアクチュエータ。
- 前記第一の連結部材に対して前記第二の軸部材がその軸線の回りを回転できないように、前記第二の軸部材が前記第一の連結部材に固定されることを特徴とする請求項1又は2に記載のリニアモータアクチュエータ。
- 前記第二の軸部材が中空であり、前記第二の軸部材の先端部に設けた吸着具で移動体を吸着できるように真空吸引されることを特徴とする請求項1ないし3のいずれかに記載のリニアモータアクチュエータ。
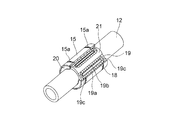
- 前記第二の連結部材には、ケーシングが取り付けれ、当該ケーシングには前記第二の軸部材がその軸線方向に直線運動するのを案内する外筒が収容されることを特徴とする請求項1ないし4のいずれかに記載のリニアモータアクチュエータ。
- 前記外筒は、前記第二の軸部材の軸線方向に離間させた状態で少なくとも二つ設けられることを特徴とする請求項5に記載のリニアモータアクチュエータ。
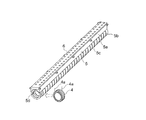
- 前記第二の軸部材の外周面には、前記第二の軸部材の軸線方向に伸びる複数のスプライン溝が形成され、
前記少なくとも二つの外筒それぞれには、前記複数本のスプライン溝に対向する複数の転動体転走溝が形成されると共に、前記複数のスプライン溝と前記複数の転動体転走溝との間を転がる転動体を循環させる複数の転動体循環経路が設けられ、
前記少なくとも二つの外筒が前記第二の軸部材に対して反対方向にねじられた状態で前記ケーシングに収容されることを特徴とする請求項6に記載のリニアモータアクチュエータ。 - 前記第二の軸部材、前記第一の連結部材、及び前記第二の連結部材から構成される回転阻止構造が、前記第一の軸部材の軸線方向の両端部に設けられることを特徴とする請求項1ないし7のいずれかに記載のリニアモータアクチュエータ。
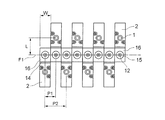
- 請求項1ないし8のいずれかに記載のリニアモータアクチュエータが複数組み合わされた多軸リニアモータアクチュエータであって、
複数の第二の軸部材の軸線が平行に配置され、かつ、隣り合う一対のリニアモータアクチュエータの一対の第一の軸部材が、隣り合う一対の第二の軸部材の軸線が含まれる平面を挟んで当該平面の両側に配置されることを特徴とする多軸リニアモータアクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009178165A JP5542384B2 (ja) | 2008-07-30 | 2009-07-30 | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008195761 | 2008-07-30 | ||
| JP2008195761 | 2008-07-30 | ||
| JP2009178165A JP5542384B2 (ja) | 2008-07-30 | 2009-07-30 | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013223411A Division JP5552566B2 (ja) | 2008-07-30 | 2013-10-28 | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010057357A true JP2010057357A (ja) | 2010-03-11 |
| JP5542384B2 JP5542384B2 (ja) | 2014-07-09 |
Family
ID=42072678
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009178165A Active JP5542384B2 (ja) | 2008-07-30 | 2009-07-30 | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ |
| JP2013223411A Active JP5552566B2 (ja) | 2008-07-30 | 2013-10-28 | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013223411A Active JP5552566B2 (ja) | 2008-07-30 | 2013-10-28 | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP5542384B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2403118A2 (en) | 2010-07-01 | 2012-01-04 | Kabushiki Kaisha Yaskawa Denki | Actuator |
| JP2012075287A (ja) * | 2010-09-29 | 2012-04-12 | Thk Co Ltd | リニアモータアクチュエータ |
| CN104124853A (zh) * | 2013-04-25 | 2014-10-29 | 山洋电气株式会社 | 轴旋转型线性电动机及轴旋转型线性电动机机组 |
| CN104467268A (zh) * | 2013-09-24 | 2015-03-25 | 山洋电气株式会社 | 直线电机单元 |
| WO2015046033A1 (ja) * | 2013-09-25 | 2015-04-02 | Thk株式会社 | ボールスプライン付きリニアモータアクチュエータ及びその製造方法 |
| CN109391118A (zh) * | 2017-08-07 | 2019-02-26 | 山洋电气株式会社 | 轴转动直线电机 |
| JP7503833B2 (ja) | 2020-09-11 | 2024-06-21 | 日本パルスモーター株式会社 | 多軸リニアモータアクチュエータ |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6543686B1 (ja) | 2017-12-26 | 2019-07-10 | ミネベアミツミ株式会社 | 荷重センサおよび荷重センサ一体型多軸アクチュエータ |
| JP6872475B2 (ja) * | 2017-12-26 | 2021-05-19 | ミネベアミツミ株式会社 | 荷重センサおよび荷重センサ一体型多軸アクチュエータ |
| JP6543687B1 (ja) | 2017-12-26 | 2019-07-10 | ミネベアミツミ株式会社 | 荷重センサおよび荷重センサ一体型多軸アクチュエータ |
| TWI660133B (zh) | 2018-06-22 | 2019-05-21 | 和碩聯合科技股份有限公司 | 伸縮調整裝置 |
| JP2020065426A (ja) * | 2018-10-19 | 2020-04-23 | Thk株式会社 | アクチュエータユニットおよびアクチュエータ |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000092813A (ja) * | 1998-09-11 | 2000-03-31 | Minolta Co Ltd | リニアモータ駆動装置 |
| JP2002307360A (ja) * | 2001-04-13 | 2002-10-23 | Juki Corp | 電子部品実装機の装着ヘッド |
-
2009
- 2009-07-30 JP JP2009178165A patent/JP5542384B2/ja active Active
-
2013
- 2013-10-28 JP JP2013223411A patent/JP5552566B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000092813A (ja) * | 1998-09-11 | 2000-03-31 | Minolta Co Ltd | リニアモータ駆動装置 |
| JP2002307360A (ja) * | 2001-04-13 | 2002-10-23 | Juki Corp | 電子部品実装機の装着ヘッド |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2403118A3 (en) * | 2010-07-01 | 2014-10-29 | Kabushiki Kaisha Yaskawa Denki | Actuator |
| KR101475555B1 (ko) * | 2010-07-01 | 2014-12-31 | 가부시키가이샤 야스카와덴키 | 액추에이터 |
| EP2403118A2 (en) | 2010-07-01 | 2012-01-04 | Kabushiki Kaisha Yaskawa Denki | Actuator |
| JP2012075287A (ja) * | 2010-09-29 | 2012-04-12 | Thk Co Ltd | リニアモータアクチュエータ |
| US9712030B2 (en) | 2013-04-25 | 2017-07-18 | Sanyo Denki Co., Ltd. | Shaft rotary type linear motor and shaft rotary type linear motor unit |
| CN104124853A (zh) * | 2013-04-25 | 2014-10-29 | 山洋电气株式会社 | 轴旋转型线性电动机及轴旋转型线性电动机机组 |
| DE102014105677A1 (de) | 2013-04-25 | 2014-10-30 | Sanyo Denki Co., Ltd. | Drehwellenartiger Linearantriebsmotor und drehwellenartige Linearantriebsmotor-Einheit |
| KR20140127764A (ko) | 2013-04-25 | 2014-11-04 | 산요 덴키 가부시키가이샤 | 축 회전형 직선형 모터 및 축 회전형 직선형 모터 유닛 |
| TWI618338B (zh) * | 2013-04-25 | 2018-03-11 | 山洋電氣股份有限公司 | 軸旋轉型線性馬達及軸旋轉型線性馬達單元 |
| US9853530B2 (en) | 2013-09-24 | 2017-12-26 | Sanyo Denki Co., Ltd. | Linear motor unit |
| DE102014112022A1 (de) | 2013-09-24 | 2015-03-26 | Sanyo Denki Co., Ltd. | Linearmotoreinheit |
| CN104467268A (zh) * | 2013-09-24 | 2015-03-25 | 山洋电气株式会社 | 直线电机单元 |
| CN104467268B (zh) * | 2013-09-24 | 2018-10-02 | 山洋电气株式会社 | 直线电机单元 |
| TWI657645B (zh) * | 2013-09-24 | 2019-04-21 | 山洋電氣股份有限公司 | 線性馬達單元 |
| JP2015065757A (ja) * | 2013-09-25 | 2015-04-09 | Thk株式会社 | ボールスプライン付きリニアモータアクチュエータ及びその製造方法 |
| KR20160039294A (ko) | 2013-09-25 | 2016-04-08 | 티에치케이 가부시끼가이샤 | 볼 스플라인이 구비된 리니어 모터 액추에이터 및 그 제조 방법 |
| CN105594109A (zh) * | 2013-09-25 | 2016-05-18 | Thk株式会社 | 带滚珠花键的线性电动机致动器及其制造方法 |
| KR101666340B1 (ko) * | 2013-09-25 | 2016-10-13 | 티에치케이 가부시끼가이샤 | 볼 스플라인이 구비된 리니어 모터 액추에이터 및 그 제조 방법 |
| WO2015046033A1 (ja) * | 2013-09-25 | 2015-04-02 | Thk株式会社 | ボールスプライン付きリニアモータアクチュエータ及びその製造方法 |
| CN109391118A (zh) * | 2017-08-07 | 2019-02-26 | 山洋电气株式会社 | 轴转动直线电机 |
| TWI791565B (zh) * | 2017-08-07 | 2023-02-11 | 日商山洋電氣股份有限公司 | 軸旋轉線性馬達 |
| JP7503833B2 (ja) | 2020-09-11 | 2024-06-21 | 日本パルスモーター株式会社 | 多軸リニアモータアクチュエータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5552566B2 (ja) | 2014-07-16 |
| JP5542384B2 (ja) | 2014-07-09 |
| JP2014018072A (ja) | 2014-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5552566B2 (ja) | リニアモータアクチュエータ及び多軸リニアモータアクチュエータ | |
| JP4860623B2 (ja) | マイクロアクチュエータ | |
| US8143750B2 (en) | Linear motor having coils surrounding an axially moving magnetic rod | |
| KR101279247B1 (ko) | 리니어 모터 및 그 제조 방법 | |
| JP4176075B2 (ja) | 磁気軸受スピンドル | |
| JP5620503B2 (ja) | 電動式ステージ | |
| JP6082646B2 (ja) | 軸回転型リニアモータ、および軸回転型リニアモータユニット | |
| US9853530B2 (en) | Linear motor unit | |
| JP2011155827A (ja) | 直線・回転複合アクチュエータシステム | |
| JP2019536415A (ja) | 特に空気循環弁用のギアモータ | |
| JP2000004575A (ja) | リニア駆動アクチュエ―タ | |
| JPWO2009008247A1 (ja) | リニアアクチュエータユニット | |
| US6798087B1 (en) | Rotary-linear actuator system, method of manufacturing and method of using a rotary-linear actuator | |
| JP4580847B2 (ja) | リニアモータユニット及びその組み合わせ方法 | |
| EP2474081A1 (en) | Transverse flux electrical motor | |
| KR101460400B1 (ko) | 리니어 모터 | |
| JP4734946B2 (ja) | アクチュエータ | |
| JP6611966B2 (ja) | 電動機およびその製造方法 | |
| EP1748537B1 (en) | Z-theta table activated by two rotary motors | |
| JP5097989B2 (ja) | スパイラルモータおよびスパイラルモータの製造方法 | |
| US20010026101A1 (en) | Variable reluctance motor | |
| WO2008100224A1 (en) | Improved linear-rotary servo actuator | |
| WO2019142116A1 (en) | Electric machine magnet insertion | |
| JP2009011157A (ja) | リニアモータユニット及びその組み合わせ方法 | |
| EP0020750A1 (en) | Stepper motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120606 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5542384 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |