JP2010032544A - 走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 - Google Patents
走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 Download PDFInfo
- Publication number
- JP2010032544A JP2010032544A JP2009256181A JP2009256181A JP2010032544A JP 2010032544 A JP2010032544 A JP 2010032544A JP 2009256181 A JP2009256181 A JP 2009256181A JP 2009256181 A JP2009256181 A JP 2009256181A JP 2010032544 A JP2010032544 A JP 2010032544A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- signal
- specimen
- scanning
- filter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 10
- 230000008569 process Effects 0.000 title claims abstract description 10
- 230000000694 effects Effects 0.000 title abstract description 10
- 238000005259 measurement Methods 0.000 claims description 27
- 238000006073 displacement reaction Methods 0.000 claims description 16
- 230000008859 change Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000013016 damping Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000005641 tunneling Effects 0.000 description 1
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q10/00—Scanning or positioning arrangements, i.e. arrangements for actively controlling the movement or position of the probe
- G01Q10/04—Fine scanning or positioning
- G01Q10/06—Circuits or algorithms therefor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/04—Arrangements of electrodes and associated parts for generating or controlling the discharge, e.g. electron-optical arrangement or ion-optical arrangement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q30/00—Auxiliary means serving to assist or improve the scanning probe techniques or apparatus, e.g. display or data processing devices
- G01Q30/18—Means for protecting or isolating the interior of a sample chamber from external environmental conditions or influences, e.g. vibrations or electromagnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q70/00—General aspects of SPM probes, their manufacture or their related instrumentation, insofar as they are not specially adapted to a single SPM technique covered by group G01Q60/00
- G01Q70/02—Probe holders
- G01Q70/04—Probe holders with compensation for temperature or vibration induced errors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/02—Details
- H01J2237/0216—Means for avoiding or correcting vibration effects
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/28—Scanning microscopes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/304—Controlling tubes
- H01J2237/30472—Controlling the beam
- H01J2237/30483—Scanning
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S977/00—Nanotechnology
- Y10S977/84—Manufacture, treatment, or detection of nanostructure
- Y10S977/849—Manufacture, treatment, or detection of nanostructure with scanning probe
- Y10S977/85—Scanning probe control process
- Y10S977/851—Particular movement or positioning of scanning tip
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Microscoopes, Condenser (AREA)
- Feedback Control In General (AREA)
Abstract
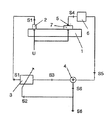
【解決手段】装置は、機械振動を感知する、かつその出力を、z信号の発生装置の出力と一緒に、加算器に接続するフィルタを駆動するセンサを含み、加算器の出力は標本とセンサの間の距離を変える装置を駆動する。
【選択図】図1
Description
図1に示す本発明による装置は、走査過程へ及ぼす機械振動の騒乱効果を補償してラスタモードで走査し、かつ顕微鏡台1上に支えられる標本7へのセンサの距離に依存する測定信号S4を感知するためのセンサ5を含む。
2 振動感知センサ
3 フィルタ
4 加算器
5 センサ
6 電子回路
7 標本
S1 センサ2からの信号
S2 フィルタ3への信号
S3 フィルタからの信号
S4 測定信号
S5 調節信号
S6 結果信号
U 騒乱
Claims (1)
- 顕微鏡台(1)上の標本(7)について、ラスタモードによる走査を実行する走査顕微鏡であって、
該標本(7)から所定の距離に配置される第1のセンサ(5)であって、該標本(7)から該第1のセンサ(5)への距離に依存する測定信号(S4)を感知する第1のセンサ(5)と、
前記ラスタモードによる走査を実行する際に、該標本(7)を有する該顕微鏡台(1)と該第1のセンサ(5)とを互いに変位させて、該走査において、該標本(7)と該第1のセンサ(5)との間の前記距離を一定に保つ変位装置と、
該変位装置には直接的には接続されない電子回路(6)であって、該電子回路(6)は該第1のセンサが感知した該測定信号(S4)を処理して、該標本(7)と該第1のセンサ(5)との間の前記距離に関する調整信号(S5)を発生させる電子回路(6)と、
該走査の進行中に発生している該顕微鏡台(1)における機械的な振動であって、該顕微鏡台にほぼ平行な平面内での相対位置が変化する振動を感知して、振動指標信号(S1)を発生する第2のセンサ(2)と、
該第2のセンサ(2)に接続され、該振動指標信号(S1)を処理してフィルター信号(S3)を得るフィルタ(3)と、
該電子回路(6) と該フィルタ(3)とに接続され、該調節信号(S5)と該フィルター信号(S3)とを加算することによって、該標本(7)と該第1のセンサ(5)との間の前記距離を一定に保つ該変位装置を制御するための最終調整信号(S6)を獲得する加算器とを備え、
該変位装置は、前記ラスタモードによる走査を実行する際に、該フィルタ信号(S3)の設定によって該最終調整信号(S6)が一定となるように調整して、前記該顕微鏡にほぼ平行な平面内で該標本(7)と該第1のセンサ(5)との間の前記距離を一定に保つ第1の機器を備えることを特徴とする走査顕微鏡。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19754681A DE19754681A1 (de) | 1997-12-10 | 1997-12-10 | In einem Rastermodus abtastende Vorrichtung mit einer Kompensation des Störeinflusses vonmechanischen Schwingungen auf dem Abtastvorgang |
| DE19754681.1 | 1997-12-10 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10349435A Division JPH11264834A (ja) | 1997-12-10 | 1998-12-09 | 走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010032544A true JP2010032544A (ja) | 2010-02-12 |
| JP4833329B2 JP4833329B2 (ja) | 2011-12-07 |
Family
ID=7851289
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10349435A Pending JPH11264834A (ja) | 1997-12-10 | 1998-12-09 | 走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 |
| JP2009256181A Expired - Fee Related JP4833329B2 (ja) | 1997-12-10 | 2009-11-09 | 走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10349435A Pending JPH11264834A (ja) | 1997-12-10 | 1998-12-09 | 走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6308557B1 (ja) |
| EP (1) | EP0922929B1 (ja) |
| JP (2) | JPH11264834A (ja) |
| KR (1) | KR100567860B1 (ja) |
| DE (2) | DE19754681A1 (ja) |
| TW (1) | TW457479B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58102538A (ja) * | 1981-12-14 | 1983-06-18 | Fujitsu Ltd | 半導体装置の製造方法 |
| DE10356561A1 (de) * | 2003-12-04 | 2005-06-30 | Carl Zeiss Smt Ag | Vorrichtung zur Positionierung einer Stelleinrichtung |
| US7249002B1 (en) | 2004-08-30 | 2007-07-24 | Kla-Tencor Technologies Corporation | Direct relative motion measurement for vibration induced noise and drift cancellation |
| DE102011055945A1 (de) * | 2011-12-01 | 2013-06-06 | Leica Microsystems Cms Gmbh | Verfahren und Vorrichtung zum Untersuchen einer Probe |
| DE102014117474A1 (de) * | 2014-11-27 | 2016-06-02 | Märzhäuser Wetzlar GmbH & Co. KG | Scanning-Tisch |
| WO2016143052A1 (ja) * | 2015-03-10 | 2016-09-15 | 株式会社島津製作所 | 走査型プローブ顕微鏡 |
| CN106653538A (zh) * | 2016-11-28 | 2017-05-10 | 聚束科技(北京)有限公司 | 一种扫描带电粒子显微镜系统及振动补偿方法 |
| DE102019116471B4 (de) | 2019-06-18 | 2021-06-10 | Bruker Nano Gmbh | Messvorrichtung für ein Rastersondenmikroskop und Verfahren zum rastersondenmikroskopischen Untersuchen einer Messprobe mit einem Rastersondenmikroskop |
| DE102019131421A1 (de) * | 2019-11-21 | 2021-05-27 | Bruker Nano Gmbh | Messvorrichtung für ein Rastersondenmikroskop und Verfahren zum rastersondenmikroskopischen Untersuchen einer Messprobe mit einem Rastersondenmikroskop |
| DE102022202996A1 (de) | 2022-03-28 | 2023-01-12 | Carl Zeiss Smt Gmbh | Messverfahren und Messvorrichtung zur Messung der Oberflächenrauheit |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0312503A (ja) * | 1989-06-09 | 1991-01-21 | Hitachi Ltd | 表面顕微鏡 |
| JPH03231110A (ja) * | 1990-02-07 | 1991-10-15 | Hitachi Ltd | 表面顕微鏡および表面顕微法 |
| JPH0579811A (ja) * | 1991-09-19 | 1993-03-30 | Nikon Corp | 走査型顕微鏡 |
| JPH06752A (ja) * | 1992-06-23 | 1994-01-11 | Agency Of Ind Science & Technol | 位置決め制御方法及び装置 |
| JPH06273428A (ja) * | 1993-03-24 | 1994-09-30 | Ricoh Co Ltd | 物理量測定センサ |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2896794B2 (ja) * | 1988-09-30 | 1999-05-31 | キヤノン株式会社 | 走査型トンネル電流検出装置,走査型トンネル顕微鏡,及び記録再生装置 |
| US5049745A (en) * | 1988-11-14 | 1991-09-17 | Amray, Inc. | Phase-compensating vibration cancellation system for scanning electron microscopes |
| US5206702A (en) * | 1989-10-09 | 1993-04-27 | Olympus Optical Co., Ltd. | Technique for canceling the effect of external vibration on an atomic force microscope |
| JPH06162982A (ja) * | 1992-11-26 | 1994-06-10 | Hitachi Ltd | 走査電子顕微鏡 |
| JPH08321274A (ja) * | 1995-05-25 | 1996-12-03 | Hitachi Ltd | 電子顕微鏡のアクティブ除振装置 |
| US5652374A (en) * | 1995-07-10 | 1997-07-29 | Delco Electronics Corp. | Method and apparatus for detecting failure in vibrating sensors |
| DE19718799A1 (de) * | 1997-05-03 | 1998-11-05 | Peter Heiland | Abbildende und/oder in einem Rastermodus abtastende Vorrichtung mit einer Einrichtung zur Kompensation von Abbildungsverschlechterungen, die durch Umgebungseinflüsse verursacht werden |
-
1997
- 1997-12-10 DE DE19754681A patent/DE19754681A1/de not_active Withdrawn
-
1998
- 1998-11-21 EP EP98122085A patent/EP0922929B1/de not_active Expired - Lifetime
- 1998-11-21 DE DE59811323T patent/DE59811323D1/de not_active Expired - Lifetime
- 1998-12-09 KR KR1019980053919A patent/KR100567860B1/ko not_active IP Right Cessation
- 1998-12-09 JP JP10349435A patent/JPH11264834A/ja active Pending
- 1998-12-09 US US09/209,057 patent/US6308557B1/en not_active Expired - Lifetime
- 1998-12-14 TW TW087120465A patent/TW457479B/zh not_active IP Right Cessation
-
2009
- 2009-11-09 JP JP2009256181A patent/JP4833329B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0312503A (ja) * | 1989-06-09 | 1991-01-21 | Hitachi Ltd | 表面顕微鏡 |
| JPH03231110A (ja) * | 1990-02-07 | 1991-10-15 | Hitachi Ltd | 表面顕微鏡および表面顕微法 |
| JPH0579811A (ja) * | 1991-09-19 | 1993-03-30 | Nikon Corp | 走査型顕微鏡 |
| JPH06752A (ja) * | 1992-06-23 | 1994-01-11 | Agency Of Ind Science & Technol | 位置決め制御方法及び装置 |
| JPH06273428A (ja) * | 1993-03-24 | 1994-09-30 | Ricoh Co Ltd | 物理量測定センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| DE59811323D1 (de) | 2004-06-09 |
| JP4833329B2 (ja) | 2011-12-07 |
| EP0922929B1 (de) | 2004-05-06 |
| US6308557B1 (en) | 2001-10-30 |
| KR19990062925A (ko) | 1999-07-26 |
| JPH11264834A (ja) | 1999-09-28 |
| KR100567860B1 (ko) | 2006-06-13 |
| DE19754681A1 (de) | 1999-06-17 |
| TW457479B (en) | 2001-10-01 |
| EP0922929A1 (de) | 1999-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4833329B2 (ja) | 走査過程に及ぼす機械振動の騒乱効果を補償するラスタモード走査装置 | |
| KR100909700B1 (ko) | 탐침위치 제어장치 및 방법 | |
| US7282655B2 (en) | Electronic balance having a position control mechanism | |
| US7041963B2 (en) | Height calibration of scanning probe microscope actuators | |
| US4948971A (en) | Vibration cancellation system for scanning electron microscopes | |
| US5729015A (en) | Position control system for scanning probe microscope | |
| US6509969B1 (en) | System for inspecting and/or processing a sample | |
| JP5662464B2 (ja) | 動的撓曲部配列を組み込んだ支持台を有する走査型プローブ顕微鏡 | |
| US7249002B1 (en) | Direct relative motion measurement for vibration induced noise and drift cancellation | |
| JP2010054310A (ja) | カンチレバー、カンチレバーシステム及びプローブ顕微鏡並びに吸着質量センサ | |
| US11664187B2 (en) | Beam steering correction for attenuating the degradation of positional accuracy of charged particle and laser light beams caused by mechanical vibrations | |
| JPH08321274A (ja) | 電子顕微鏡のアクティブ除振装置 | |
| US20110247107A1 (en) | Method for processing output of scanning type probe microscope, and scanning type probe microscope | |
| JP2005308406A (ja) | 走査型プローブ顕微鏡 | |
| KR100814141B1 (ko) | 전자 빔 측정 툴을 위한 진동 절연 방법 및 진동 절연 장치 | |
| JP2005520281A (ja) | 顕微鏡のひずみの影響を低減するためのデバイス | |
| JP3167495B2 (ja) | スキャナーシステム、及びそれを具備した走査型プローブ顕微鏡 | |
| RU2703607C1 (ru) | Устройство компенсации собственных колебаний иглы зонда сканирующего микроскопа | |
| WO2005098869A1 (en) | Scanning probe microscope with integrated calibration | |
| JPH08201402A (ja) | 走査型プローブ顕微鏡の位置制御システム | |
| TW202307435A (zh) | 使用即時漂移修正的afm成像 | |
| JPH10221061A (ja) | プローブ顕微鏡の校正装置 | |
| JP2008008778A (ja) | 薄片状の被測定物の形状測定方法およびその装置 | |
| JPH08262037A (ja) | 走査型プローブ顕微鏡 | |
| JPH0414112A (ja) | 圧電素子による微動機構の較正装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100317 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100617 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110124 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110422 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110427 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110829 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110921 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140930 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |