JP2010030017A - プレス装置及びそれを用いたプレス方法 - Google Patents
プレス装置及びそれを用いたプレス方法 Download PDFInfo
- Publication number
- JP2010030017A JP2010030017A JP2008197409A JP2008197409A JP2010030017A JP 2010030017 A JP2010030017 A JP 2010030017A JP 2008197409 A JP2008197409 A JP 2008197409A JP 2008197409 A JP2008197409 A JP 2008197409A JP 2010030017 A JP2010030017 A JP 2010030017A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- motor
- ball screw
- punching
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Abstract
【課題】基材に印刷されたパターン等を打ち抜くに際して、正確に所望する箇所を打ち抜くことができるプレス装置を提供すること。
【解決手段】基台2と、基台2の上方に備えた台盤3と、台盤3上の基材を台盤3の長手方向へ移動するためのX軸稼動機構と、台盤3上に昇降自在に備えられるとともに内部に撮影用カメラ24を装備した打抜ヘッド13と、該打抜ヘッド13を台盤3の長手方向に直交する方向に往復移動するためのY軸稼働機構と、前記打抜ヘッド13の一部を回転させるためのθ軸稼働機構と、X軸稼働機構、Y軸稼働機構及びθ軸稼働機構を制御するための制御部とを有しており、X軸稼働機構により打抜ヘッド13の下方に移動された基材に備えられたマーク位置をカメラにより撮影し、撮影用カメラからの信号を受けて、X軸稼働機構、Y軸稼働機構、θ軸稼働機構を制御して打抜ヘッド13の位置を補正する。
【選択図】図1
【解決手段】基台2と、基台2の上方に備えた台盤3と、台盤3上の基材を台盤3の長手方向へ移動するためのX軸稼動機構と、台盤3上に昇降自在に備えられるとともに内部に撮影用カメラ24を装備した打抜ヘッド13と、該打抜ヘッド13を台盤3の長手方向に直交する方向に往復移動するためのY軸稼働機構と、前記打抜ヘッド13の一部を回転させるためのθ軸稼働機構と、X軸稼働機構、Y軸稼働機構及びθ軸稼働機構を制御するための制御部とを有しており、X軸稼働機構により打抜ヘッド13の下方に移動された基材に備えられたマーク位置をカメラにより撮影し、撮影用カメラからの信号を受けて、X軸稼働機構、Y軸稼働機構、θ軸稼働機構を制御して打抜ヘッド13の位置を補正する。
【選択図】図1
Description
本発明は、フィルム等の基材に印刷等されたパターン等を打ち抜くために用いるプレス装置及びこのプレス装置を用いたプレス方法に係り、より詳しくは、刃物の上方から基材に備えられたマークの位置の確認をしつつ、その確認結果に基づいて基材の位置に合わせて刃物を可動自在としたプレス装置、及び、刃物の上方から基材に備えられたマークの位置の確認をし、その確認結果に基づいて基材の位置に合わせて刃物の位置を補正し、その後、マークの位置を再度確認した後にプレスするプレス方法に関する。
従来から、フィルム、テープ、紙等の基材に印刷されたパターン等を打ち抜いていくための装置としてプレス装置が用いられている。
例えば、半導体チップを製造する場合には、フィルム等の基材に複数のチップを印刷しておき、その後、プレス装置によって基材に印刷されているチップ部分を同時に多数個取りすることが行われている。
ここで、過去に提案された従来のプレス装置を説明すると、特開平11−277494号公報に開示されている従来のプレス装置では、基板の打抜部を打ち抜くための抜型を有しているとともに、基材をY方向に往復運動可能とした第1テーブルと、この第1テーブルの上に配置された、基材をX方向に往復運動可能とした第2テーブルと、基材をX方向と回転角θ方向への位置調整をするための機構を設け、更に、基材の位置ズレを検出する位置センサーを有しており、位置センサーにより基材位置を検出するとともにこの検出結果に基づいて基材位置を調整して打ち抜くことを可能にしている。
特開平11−277494号公報
しかし、前述の従来のプレス装置では、基材の位置ズレを検出するためのセンサーを抜型の手前に配置し、センサーで基材位置を検出した後に基材を抜型の下方まで搬送するため、センサーで基材位置を検出した後に基材を搬送する過程で基材がずれてしまった場合には何らの対応もできず、ずれた状態のままでプレスが行われてしまうという問題点がある。
そこで、本発明は、基材に印刷されたパターン等を打ち抜くに際して、正確に所望する箇所を打ち抜くことができるプレス装置及びそれを用いたプレス方法を提供することを課題としている。
本発明のプレス装置は、基台と、該基台の上方に備えた台盤と、該台盤に載置した基材を前記台盤の長手方向へ移動するためのX軸稼動機構と、前記台盤上に昇降自在に備えられるとともに、Y軸稼動機構によって前記台盤の長手方向に直交する方向に移動自在とされた打抜ヘッドと、制御部と、を備え、前記打抜ヘッドの下方に配置した基材に印刷されたパターンを打ち抜くためのプレス装置であって、
前記X軸稼動機構は、X軸稼動用モーターと、該X軸稼動用モーターのモーター軸に連結した第1のボールネジと、該第1のボールネジに螺合された、前記台盤上に配設されたチャックを備えた可動板と、を具備し、前記X軸稼動用モーターを駆動して前記第1のボールネジを回動することで前記チャックを前記台盤の長手方向へ往復移動自在とし、
前記打抜ヘッドは、前記台盤の長手方向に直交する方向に向けて備えたガイドレールにガイドレールの長手方向へ往復移動自在に連結したレールベアリングと、該レールベアリングに連結したY軸稼働ワークと、該Y軸稼働ワークに連結された固定ワークと、係止部材を介して前記固定ワークに回動自在に連結され、θ軸稼動機構を介して回動される、センシング孔を有するとともに刃物が装着されるホルダーを備えたθ軸稼動ワークと、該θ軸稼動ワーク内に配設した撮影用カメラと、前記Y軸稼働ワークに連結したレール部と、を具備し、
前記Y軸稼動機構は、Y軸稼動用モーターと、該Y軸稼動用モーターのモーター軸に連結した第2のボールネジと、該第2のボールネジに螺合されるとともに前記打抜ヘッドのレール部が昇降自在に係止されたた連結体と、を具備し、前記Y軸稼動用モーターを駆動して第2の前記ボールネジを回動することで、前記連結体を第2のボールネジの長手方向へ往復移動するとともに前記打抜ヘッドを同方向へ往復移動自在とし、
前記θ軸稼動機構は、θ軸稼動用モーターと、該θ軸稼動用モーターのモーター軸に連結された第3のボールネジと、前記固定ワークにスライド自在に連結されたスライド部材と、該スライド部材に連結されたホルダーと、該ホルダーに回動自在に連結されるとともに、前記θ軸稼動ワークに連結した軸受クランプに挟持されたローラーと、を具備し、前記θ軸稼働用モーターを駆動して前記第3のボールネジを回動することで、前記スライド部材を前記固定ワークに対してスライドさせるとともに前記ホルダーをスライドさせ、これにより前記ローラーによって前記軸受クランプを押圧して前記回転体を回転可能として、
前記制御部は、前記撮影用カメラにより撮影した前記基材に印刷されたマークの位置信号を受けて、前記マークが予め設定した位置になるように、前記X軸稼動用モーター、Y軸稼動用モーター、及びθ軸稼動用モーターの作動を制御する、ことを特徴としている。
前記X軸稼動機構は、X軸稼動用モーターと、該X軸稼動用モーターのモーター軸に連結した第1のボールネジと、該第1のボールネジに螺合された、前記台盤上に配設されたチャックを備えた可動板と、を具備し、前記X軸稼動用モーターを駆動して前記第1のボールネジを回動することで前記チャックを前記台盤の長手方向へ往復移動自在とし、
前記打抜ヘッドは、前記台盤の長手方向に直交する方向に向けて備えたガイドレールにガイドレールの長手方向へ往復移動自在に連結したレールベアリングと、該レールベアリングに連結したY軸稼働ワークと、該Y軸稼働ワークに連結された固定ワークと、係止部材を介して前記固定ワークに回動自在に連結され、θ軸稼動機構を介して回動される、センシング孔を有するとともに刃物が装着されるホルダーを備えたθ軸稼動ワークと、該θ軸稼動ワーク内に配設した撮影用カメラと、前記Y軸稼働ワークに連結したレール部と、を具備し、
前記Y軸稼動機構は、Y軸稼動用モーターと、該Y軸稼動用モーターのモーター軸に連結した第2のボールネジと、該第2のボールネジに螺合されるとともに前記打抜ヘッドのレール部が昇降自在に係止されたた連結体と、を具備し、前記Y軸稼動用モーターを駆動して第2の前記ボールネジを回動することで、前記連結体を第2のボールネジの長手方向へ往復移動するとともに前記打抜ヘッドを同方向へ往復移動自在とし、
前記θ軸稼動機構は、θ軸稼動用モーターと、該θ軸稼動用モーターのモーター軸に連結された第3のボールネジと、前記固定ワークにスライド自在に連結されたスライド部材と、該スライド部材に連結されたホルダーと、該ホルダーに回動自在に連結されるとともに、前記θ軸稼動ワークに連結した軸受クランプに挟持されたローラーと、を具備し、前記θ軸稼働用モーターを駆動して前記第3のボールネジを回動することで、前記スライド部材を前記固定ワークに対してスライドさせるとともに前記ホルダーをスライドさせ、これにより前記ローラーによって前記軸受クランプを押圧して前記回転体を回転可能として、
前記制御部は、前記撮影用カメラにより撮影した前記基材に印刷されたマークの位置信号を受けて、前記マークが予め設定した位置になるように、前記X軸稼動用モーター、Y軸稼動用モーター、及びθ軸稼動用モーターの作動を制御する、ことを特徴としている。
そして、このプレス装置を用いた本発明のプレス方法は、X軸稼動機構によって基材を打抜ヘッドの下方に移動し、基材に印刷されているマークを撮影用カメラによって撮影し、撮影したマークの位置信号を制御部に送信するとともに、制御部においてマークの位置信号と予め記憶している位置情報とを比較し、マークの位置信号と予め記憶している位置情報とが異なっている場合には、前記X軸稼動用モーター、Y軸稼動用モーター、θ軸稼動用モーターを作動させて、打抜ヘッドの位置を、打抜パターンを正確に打ち抜く位置に補正し、その後、撮影用カメラを介して、基材に印刷されているマークの位置を再度確認し、打抜ヘッドの位置が正確な位置に配置されている場合に、打抜ヘッドによってパターンを打ち抜く、ことを特徴としている。
本発明のプレス装置では、基台上に載置した基材を基台の長手方向(X軸方向)へ移動するためのX軸稼動機構と、基材に印刷されたパターンを打ち抜くための打抜ヘッドを基台の長手方向に直交する方向(Y軸方向)へ移動するためのY軸稼動機構と、刃物が装着されるθ軸稼働ワークを回転するためのθ軸稼動機構を有するとともに、打抜きヘッド内に撮影用カメラを挿装し、刃物の下方に基材が搬送された後に刃物の上方から基材の位置の確認を行うことが可能である。
そのために、本発明のプレス装置では、基材に設けられているマークを撮影用カメラで撮影して打抜ヘッドの位置調整を行い、その状態で、再度マークの位置を確認した後に打抜きヘッドにより基材を打ち抜くことが可能である。
従って、本発明のプレス装置では、位置センサーを抜型の手前に配置している従来のプレス装置と異なり、基材が打抜きヘッドの下方に搬送された後に基材の位置の確認を行うことができるとともに、位置の確認をしながら打抜ヘッドの位置調整を行うことができ、これにより位置調整が正確に行われたどうかを確認することもできるため、所望する箇所を正確に打ち抜くことができる。
本発明のプレス装置では、基台と、この基台上に備えた台盤を有するとともに、台盤に載置した基材を前記台盤の長手方向へ移動するためのX軸稼動機構と、前記台盤上に昇降自在に備えられるとともに、Y軸稼動機構によって前記台盤の長手方向に直交する方向に移動自在とされた打抜ヘッドと、制御部と、を備えている。
そして、X軸稼動機構は、X軸稼動用モーターと、該X軸稼動用モーターのモーター軸に連結した第1のボールネジと、該第1のボールネジに螺合された、前記台盤上に配設されたチャックを備えた可動板とを具備しており、この構成によって、X軸稼動用モーターを駆動して前記第1のボールネジを回動することで前記チャックを前記台盤の長手方向へ往復移動自在としている。
また、打抜ヘッドは、前記台盤の長手方向に直交する方向に向けて備えたガイドレールにガイドレールの長手方向へ往復移動自在に連結したレールベアリングと、該レールベアリングに連結したY軸稼働ワークと、該Y軸稼働ワークに連結された固定ワークと、係止部材を介して前記固定ワークに回動自在に連結され、θ軸稼動機構を介して回動される、センシング孔を有するとともに刃物が装着されるホルダーを備えたθ軸稼動ワークと、該θ軸稼動ワーク内に配設した撮影用カメラと、前記Y軸稼働ワークに連結したレール部とを具備している。
そして、Y軸稼動機構は、Y軸稼動用モーターと、該Y軸稼動用モーターのモーター軸に連結した第2のボールネジと、該第2のボールネジに螺合されるとともに、前記打抜ヘッドのレール部が昇降自在に係止されたた連結体とを具備しており、これにより、Y軸稼動用モーターを駆動して第2の前記ボールネジを回動することで、前記連結体を第2のボールネジの長手方向へ往復移動するとともに前記打抜ヘッドを同方向へ往復移動自在としている。
また、θ軸稼動機構は、θ軸稼動用モーターと、該θ軸稼動用モーターのモーター軸に連結された第3のボールネジと、前記固定ワークにスライド自在に連結されたスライド部材と、該スライド部材に連結されたホルダーと、該ホルダーに回動自在に連結されるとともに、前記θ軸稼動ワークに連結した軸受クランプに挟持されたローラーとを具備しており、前記θ軸稼働用モーターを駆動して前記第3のボールネジを回動することで、前記スライド部材を前記固定ワークに対してスライドさせるとともに前記ホルダーをスライドさせ、これにより前記ローラーによって前記軸受クランプを押圧して前記回転体を回転可能としている。
そして、制御部は、前記撮影用カメラにより撮影した前記基材に印刷されたマークの位置信号を受けて、前記マークが予め設定した位置になるように、前記X軸稼動用モーター、Y軸稼動用モーター、及びθ軸稼動用モーターの作動を制御して打抜ヘッドの位置調整を可能としている。
また、この構成において、基材に印刷された打ち抜きパターンを打ち抜く場合には、まず、X軸稼動機構によって基材を打抜ヘッドの下方に移動し、基材に印刷されているマークを撮影用カメラによって撮影し、撮影したマークの位置信号を制御部に送信する。
そして、マークの位置信号を受けた制御部においては、マークの位置信号と予め記憶している位置情報とを比較し、マークの位置信号と予め記憶している位置情報とが異なっている場合には、前記X軸稼動用モーター、Y軸稼動用モーター、θ軸稼動用モーターを作動させて、打抜ヘッドの位置を、打抜パターンを正確に打ち抜く位置に補正し、その後、撮影用カメラを介して、基材に印刷されているマークの位置を再度確認し、打抜ヘッドの位置が正確な位置に配置されている場合に、打抜ヘッドによってパターンを打ち抜く。
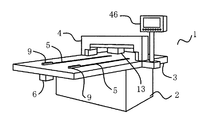
本発明のプレス装置の実施例について図面を参照して説明すると、図1は本実施例のプレス装置の概略斜視図であり、図において1が本実施例のプレス装置である。
そして、本実施例のプレス装置1では、基台を有しており、この基台の上には、基材が載置されるとともに搬送される台盤を有している。即ち、図において2が基台であり、本実施例においてこの基台2の内部には後述する昇降機構が装備されている。
また、図において3が台盤であり、本実施例においてこの台盤3は、平面形状を長方形状としており、長手方向に沿った一端側には、門形としたフレーム4を備えており、このフレーム4内には基材に印刷された打ち抜きパターンを打ち抜くための打抜ヘッドが装備されている。なお、図1において46は操作スイッチを備えたモニター装置であり、本実施例におけるプレス装置1では、前記フレーム4の上方にモニター46を備えるとともに、前記台盤3の下方には図示しない制御盤を備え、モニター46に備えた操作スイッチを用いて各種の設定等を可能にしている。
そして、前記台盤3には、台盤3の上面に載置した基材を台盤3の長手方向(以下「X軸方向」という。)に往復移動するためのX軸稼働機構を有している。
ここで、前記X軸稼働機構を説明すると、本実施例において前記X軸稼働機構は、X軸稼働用モーターと、このX軸稼働用モーターのモーター軸に連結された第1のボールネジと、このボールネジに螺合された可動板と、この可動板に装備されたチャックとで構成される。
即ち、図1において6がX軸稼働用モーターであり、本実施例においては、前記台盤3における反フレーム側の端部近傍の下面に、モーター軸が台盤3の長手方向と同方向に向くような配置でX軸稼働用モーター6が備えられている。そして、このX軸稼働用モーター6のモーター軸には、台盤3の長手方向に向けて、第1のボールネジ(図示せず)が連結されており、この第1のボールネジに可動板8が螺合されている。
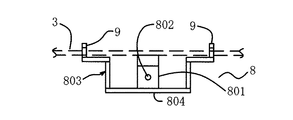
ここで、図2は前記可動板8を説明するための図であり、正面側から見た状態を示している。また、点線で示した部分3は前記台盤3の部分である。
そして、本実施例においてこの可動板8は、前記第1のボールネジが螺合される螺合孔802を有した可動部801を有しており、この可動部801には連通板804を、前記台盤3の長手方向に直交する方向に向けて連設するとともに、この連通板804の両端部にはそれぞれ、上方に向けてアーム803を連設しており、このアーム803の先端部に、基材を挟持するチャック9が装備されている。なお本実施例において前記アーム803はそれぞれ、図にも示されるように、鉤状としている。
一方、前記台盤3には、長手方向に向けて平行して2本の溝5が形成されており、前記チャック9は、溝5内を往復移動自在にして溝5を貫通している。
ここで、図3は前記チャック9の斜視図であり、また、図4は前記チャック9の構造を示す断面図であり、本実施例において前記チャック9は、長尺の角棒状とした本体部901と、ピン部材903によって前記本体部901の上部にシーソー状に可動自在に連結した挟持部902を有している。
そして、前記本体部901はその先端部上面を僅かに切り欠いており、一方、前記挟持部902は先端部下面を僅かに切り欠いており、これにより前記チャック9は、先端部に、基材の端部を挿装するための挟持空間904を形成し、この挟持空間904内に基材の端部を挿装した状態で前記挟持部902の先端を下側に押圧することで、基材を挟持して固定することを可能としている。従って、前記チャック9は、挟持空間904が台盤3の上面に突出するような配置で前記アーム803の先端に装備されている。
また、前記本体部901には、前記挟持部902における基端側で閉鎖される配置でエアー孔905を有しており、このエアー孔905には、図示しないエアー管が連結され、このエアー管を介してエアー孔905の上方に向けてエアーを噴出することで、エアー孔905内に配設したボールプラグ906を介して、前記挟持部902の基端側を上方に押し上げ、これにより挟持部902の先端を下側に押圧することを可能としている。
そして、このように構成される本実施例のX軸稼働機構では、前記X軸稼働用モーター6を駆動して第1のボールネジを回転することで、前記可動板8が台盤3の長手方向に向けて移動するとともに、この可動板8の移動に伴って前記チャック9が、前記溝5内を往復移動可能となるため、チャック9により基材の端部を挟持した状態で前記X軸稼働用モーター6を駆動することで、基材を前記フレーム4内に移動することが可能となる。
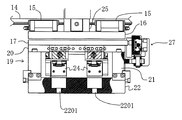
次に、前記フレーム4内に備えられた打抜ヘッドについて説明すると、図5乃至図15は打ち抜きヘッドを説明するための図であり、図5は打抜ヘッドの正面を示す図、図6は打抜ヘッドの縦断正面構造を示す図、図7は打抜ヘッドの左側面を示す図、図8は打抜ヘッドの平面を示す図、図9は打抜ヘッドの背面を示す一部断面図、図10は図5におけるC−C断面構造を示す図、図11は図5におけるD−D断面構造を示す図、図12は図5におけるE−E断面構造を示す図、図13は図5におけるI−I断面構造を示す図、図14は図5におけるG−G断面構造を示す図、図15は図5におけるF−F断面構造を示す図である。
そして、図において13が打抜ヘッドであり、本実施例において前記打抜ヘッド13は、前記フレーム4内に、X軸方向と直交する方向(以下「Y軸方向」という。)と同方向に向けて備えたガイドレール14に、ガイドレール14の長手方向へ往復移動自在に連結したレールベアリング15を有している。
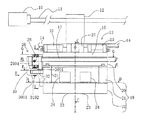
また、このレールベアリング15にはY軸稼動ワーク16が固定されており、更にY軸稼動ワーク16には固定ワーク17が連結され、この固定ワーク17には、係止部材18を介して、θ軸稼働ワーク19が回動自在に連結されている。
即ち、図6において、前記固定ワーク17の下面には、円柱形状の本体部1801とこの本体部1801の下端部をフランジ状に大径にした係止部1802とで構成される係止部材18が連結されている。
一方、前記θ軸稼働ワーク19は、前記係止部材18に回動自在に係止される回転体20と、ホルダー22と、前記回転体20とホルダー22とを連通する左右の壁部21を有している。
そして、前記回転体20は、前記係止部材18の前記本体部1801の外径と摺動可能な内径の係止孔2001を有するとともに、前記本体部1801の厚み寸法と同程度の厚み寸法を有しており、この回転体20における前記係止孔2001の周囲が前記係止部1802上に載置される形態において、前記回転体20は、前記固定ワーク17と前記係止部1802間に係止されており、これにより、θ軸稼働ワーク19は、前記固定ワーク17に対して回動自在とされている。
また、前記θ軸稼働ワーク19内には撮影用カメラ24が挿装されているとともに、前記ホルダー22には、撮影用のセンシング孔2201が形成され、更に、前記ホルダー22の下面には、打抜用の刃物23が装着されている。
次に、図5において、前記フレーム4内には、モーター軸がY軸方向と同方向に向くような配置でY軸稼働用モーター10が備えられており、このY軸稼働用モーター10のモーター軸には第2のボールネジ11が連結され、この第2のボールネジ11には連結体12が螺合され、これによりY軸稼働機構が構成されている。
一方、前記打抜ヘッド13における前記Y軸稼働ワーク16には、前記連結体12に上下動自在に連結されたレール部25が連結されており、これにより、前記Y軸稼働用モーター10を駆動して第2のボールネジ11を回転することで、前記連結体12がY軸方向に向けて移動するとともに、この連結体12の移動に伴って、この連結体12に上下動自在に連結したレール部25を有する前記打抜ヘッド13がY軸方向に往復移動を可能としている。
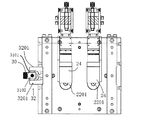
次に、図5において26はθ軸稼働機構である。すなわち、本実施例において前記打抜ヘッド13は、θ軸稼働機構26によって、固定ワーク17に対して回転自在とされている
ここで、θ軸稼働機構26について説明すると、本実施例においては、モーター軸をX軸方向と同方向としたθ軸稼働用モーター27と、このθ軸稼働用モーター27が連結されたボールネジユニットを有しており、ボールネジユニットは、第3のボールネジ28を内部に有するユニット枠2902と、前記第3のボールネジ28が貫通しているとともに前記ユニット枠2902に対してスライド自在とされたスライダー2903とを有している。そして、前記第3のボールネジ28は、前記θ軸稼働用モーター27におけるモーター軸に連結しており、これにより、前記θ軸稼働用モーター27を駆動することで、第3のボールネジ28を回転させ、それにより、前記スライダー2903を、ユニット枠2902に対してスライドすることとしている。
一方、前記固定ワーク17には連結部材2901が固定されており、前記ユニット枠2902は、この連結部材2901に固定され、これにより、ボールネジユニットとθ軸稼働用モーター27は前記固定ワーク17に固定されている。
次に、前記スライダー2903には、スライド部材2904が固定されており、更に、スライド部材2904には、上下二段とした挟持部3001をθ軸稼働ワーク19側に備えたホルダー30が連結され、これにより、前記θ軸稼働用モーター27を駆動して第3のボールネジ28を回動することで、スライダー2903を介してスライド部材2904がX軸方向に移動するとともに、それに伴ってホルダー30もまたX軸方向に移動可能としている。
また、前記ホルダー30における上下二段の挟持部3001間には、ローラー3101が、その軸線方向が上下方向に向くような配置で、挿入ピン3102を介して回動自在に配設されている。
一方、前記θ軸稼働ワーク19を構成する壁部21には、前記ホルダー30側に向けて軸受クランプ32を突設しており、この軸受クランプ32は、鍬状に二股にした挟持片3201を有しており(図12、15参照)、この挟持片3201によって、前記ローラー3101の側部を摺動自在に挟持している。
従って、上記のような構成において、θ軸稼働用モーター27を駆動して第3のボールネジ28を回転すると、この第3のボールネジ28の回転に伴って、スライダー2903とともに前記スライド部材2904がX軸方向へ移動し、それに伴って前記ホルダー30もまたX軸方向へ移動する。
そうすると、ホルダー30の挟持部3001間のローラー3101は、軸受クランプ32の挟持片3201に挟持された状態で軸受クランプ32をX軸方向へ押圧するが、軸受クランプ32が突設されている壁部21は固定ワーク17に対しては回転方向へのみ移動可能であるため、軸受クランプ32に対するローラー3101の押圧により、θ軸稼働ワーク19はθ軸方向に回転していく。
従って、本実施例においては、θ軸稼働用モーター27を駆動することで、θ軸稼働ワーク19を所定角度だけ回転することが可能となる。
なお、図16は前記撮影用カメラ24の装着方法を説明するための図であり、本実施例においては、前記回転体20にフレーム33を装着するとともに、このフレーム33内にはスライド板34を可動自在に配設し、更にこのスライド板34は、前記フレーム33を貫通した第4のボールネジ35に螺合している。
一方、前記スライド板34の下面には、逆L字状とした装着板36を連結し、この装着板36に撮影用カメラ24を装着している。
従って本実施例においては、前記第4のボールネジ35を回動することで、前記スライド板34、及び装着板36を介して、撮影用カメラ24のX軸方向への微調整を行うことが可能である。但し必ずしもこのような構成を採用する必要はない。
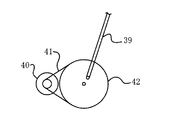
次に、図17は、前記打抜ヘッド13を昇降させるための機構を説明する図であり、図において、前記ガイドレール14には、下方に向けて昇降用可動部材37が連結されており、この昇降用可動部材37は、前記フレーム4に備えた昇降用ガイド38に上下動自在に係合されている。
一方、図18は図17におけるA方向から見た状態の前記基台2の内部を示しており、前記基台2の内部には、昇降用モーター40と、ベルト41を介して前記昇降用モーター40に連結された大プーリー42が備えられており、前記大プーリー42には、中心軸から外れた箇所に、連結棒39の一端が回動自在に連結されている。そして、前記昇降用可動部材37は、前記連結棒39の他端に連結されており、これにより、昇降用モーター40を駆動することで、前記連結棒39が前記昇降用可動部材37を下方に引き、及び上方に押し上げ、これにより前記打抜ヘッド13を昇降することを可能としている。
次に、本実施例におけるプレス装置1の制御系について図19のブロック図を参照して説明すると、本実施例においては、いずれもマイコン等により構成される主演算部と画像処理演算部とを有しており、この主演算部と画像処理演算部とで制御部が構成され、画像処理演算部は主演算部に接続されている。また、画像処理演算部には、撮影用カメラが接続されているとともに、予め、基材の配置位置が正しい場合における基材に印刷したマークの位置が記憶されている。一方、主演算部には、前記X軸稼動用モーター6、Y軸稼動用モーター11、前記θ軸稼動用モーター27、及び昇降用モーター40が接続されるとともに、その他、操作スイッチ、モニター、電源等が接続されている。
そして、画像処理演算部は、撮影用カメラ24より送信されたマーク45の位置信号と予め記憶している位置情報とを比較し、異なっている場合には、前記マークが予め設定した位置になるように、補正データを演算して主演算部に送信する。
一方、前記主演算部は、前記補正データを受けて、前記X軸稼動用モーター6、Y軸稼動用モーター11、及びθ軸稼動用モーター27の作動を制御して打抜ヘッド3の位置の補正を行う。
そして、前記マーク45が予め設定した位置になった後に、撮影用カメラ24を介してマーク45の位置を再度確認し、その後に、前記昇降用モーター40を駆動して、打抜ヘッド13を搭載した昇降用可動部材37を下降して、基材に印刷された打ち抜きパターン44を打ち抜く。
次に、このように構成される本実施例のプレス装置の作用について説明すると、図20は本実施例のプレス装置1により基材に印刷された打ち抜きパターンを打ち抜く方法を説明するための図であり、図において43が基材である。即ち、本実施例のプレス装置1では、複数の打ち抜きパターン44が印刷されるとともに、この打ち抜きパターン44の周囲に位置確認用のマーク45が印刷された1枚物の基材43に効果的に適用される。
即ち、本実施例のプレス装置1によって基材43に印刷された打ち抜きパターン44を打ち抜く場合には、予め操作スイッチにより、打ち抜きヘッド13との関係で基材43が正確な位置に配置されたときにおけるマーク45の位置を画像処理演算部に記憶させておく。
そして、その後に、基材43を台盤3上に載置し、更に、チャック9によって基材43の端部を挟持する。
そして、その状態でX軸稼働モーター6を駆動し、基材43をフレーム4内に移動させるとともに、基材43に印刷されているマーク45を撮影用カメラ24によって撮影し、撮影用カメラ24は、マーク45の位置信号を画像処理演算部に送信する。
そうすると、画像処理演算部においては、マーク45の位置信号と予め記憶している位置情報とを比較して、異なっている場合には、補正データを演算するとともにその補正データを主演算部に送信し、主演算部はそれを受けて、前記X軸稼動用モーター6、Y軸稼動用モーター11、θ軸稼動用モーター27を作動させて、打抜ヘッド13の位置を、打抜パターン44を正確に打ち抜く位置に補正する。即ち、マーク45の位置信号と予め記憶している位置情報とが一致するように打抜ヘッド13の位置を補正する。そして更にその後に、撮影用カメラ24により、再度、マーク45の位置を確認する。
そして、打抜ヘッド13の位置が正確な位置に配置された後に、昇降用モーター40を駆動して打抜ヘッド13を下降させ、刃物23によって基材43に印刷されたパターン44を打ち抜く。そして、この動作をすべての打ち抜きパターン44を打ち抜くまで継続していく。即ち、一つの打ち抜きパターン44を打ち抜いた後に打抜ヘッド13を移動させて他の打ち抜きパターン44の上方に打抜ヘッド13を移動させて打ち抜きパターン44を打ち抜き、このようにして、すべての打ち抜きパターン44を打ち抜くまで継続していく。
そして、このとき、本実施例のプレス装置1では、θ軸稼働ワーク19内に撮影用カメラ24を配置し、打抜ヘッド13の内部において、刃物23の上方から基材に印刷されたマークを撮影し、更に基材の位置補正を行った後に再度マークの位置の確認を行うために、抜型の手前にセンサーを配置し、マークを検出した後に基材を搬送する従来の方法と異なり、基材の位置を正確に刃物に合せることが可能である。
即ち、センサーを抜型の手前に配置している場合には、センサーで基板位置を検出した後に基材を搬送する過程で基材がずれてしまった場合には何らの対応もできず、ずれた状態のままでプレスが行われてしまうという問題点があるが、本実施例のプレス装置では、θ軸稼働ワーク19内に撮影用カメラ24を配置しており、刃物の上方から打ち抜きパターンの位置を確認することができるために、打ち抜きパターン44の周囲に配置されたマーク45を確実に確認することができ、従って、正確に打ち抜きパターンを打ち抜くことが可能である。
また、センサーを抜型の手前に配置している場合等、抜型の外側にセンサーを配置しているプレス装置では、図20に示すような一枚の基材に複数の打ち抜きパターン44が印刷されるとともにこの打ち抜きパターン44の周囲に位置確認用のマーク45が印刷されている場合には、位置確認用のマークが抜型の下方に入ってしまうためにパターンの位置を確認することは不可能であるが、本実施例のプレス装置では、θ軸稼働ワーク19内に撮影用カメラ24を配置しているために、このような基材の打ち抜きパターンを打ち抜く場合でも、正確に打ち抜きパターンを打ち抜くことが可能である。
なお、前述したように、画像処理演算部には予め、基材の配置位置が正しい場合における基材に印刷したマークの位置が記憶されているが、撮影用カメラを組み付けたときのズレ、マークのピッチの変更等により、撮影用カメラから送信されるマークの位置信号と予め記憶している位置情報とが一致した場合であっても、必ずしも正確に打抜パターンを打ち抜くことができるとは限らない。そこで、本実施例においては、特に撮影用カメラを組み付け直した場合や新たな基材等の場合には、打抜ヘッド13の位置を補正した後に試し抜きを行い、この試し抜きの結果、マークの位置信号と予め記憶している位置情報とが一致した場合においても打ち抜きパターンを正確に打ち抜くことができない場合には、手動によりずれている分をオフセットデータとして入力し、画像処理演算部から主演算部へ補正データを送信する場合に、このオフセットデータを考慮して補正データを作成することとしている。
本発明のプレス装置は、基材に印刷されたパターンを打ち抜くための刃物の上方において基材に印刷されたマークを撮影し、その撮影結果に基づいて、刃物が装着された打抜ヘッドを、基材に印刷されたマークを撮影しながら、X軸方向、Y軸方向、θ方向へ補正可能とし、これにより正確にパターンを打ち抜くことを可能としているため、基材に印刷等されたパターン等を打ち抜くプレス装置の全般に適用可能である。
1 プレス装置
2 基台
3 台盤
4 フレーム
5 溝
6 X軸稼働用モーター
8 可動板
801 可動部
802 螺合孔
803 アーム
9 チャック
901 本体部
902 挟持部
903 ピン部材
904 挟持空間
905 エアー孔
10 Y軸稼働用モーター
11 第2のボールネジ
12 連結体
13 打抜ヘッド
14 ガイドレール
15 レールベアリング
16 Y軸稼働ワーク
17 固定ワーク
18 係止部材
1801 本体部
1802 係止部
19 θ軸稼働ワーク
20 回転体
21 壁部
22 ホルダー
2201 センシング孔
23 刃物
24 撮影用カメラ
25 レール部
26 θ軸稼働機構
27 θ軸稼働用モーター
28 第3のボールネジ
2901 連結部材
2902 ユニット枠
2903 スライダー
2904 スライド部材
30 ホルダー
3001 挟持部
3101 ローラー
3102 挿入ピン
32 軸受クランプ
3201 挟持片
33 フレーム枠
34 スライド板
35 第4のボールネジ
36 装着板
37 昇降用可動部材
38 昇降用ガイド
39 連結棒
40 昇降用モーター
41 ベルト
42 大プーリー
43 基材
44 打ち抜きパターン
45 マーク
46 モニター
2 基台
3 台盤
4 フレーム
5 溝
6 X軸稼働用モーター
8 可動板
801 可動部
802 螺合孔
803 アーム
9 チャック
901 本体部
902 挟持部
903 ピン部材
904 挟持空間
905 エアー孔
10 Y軸稼働用モーター
11 第2のボールネジ
12 連結体
13 打抜ヘッド
14 ガイドレール
15 レールベアリング
16 Y軸稼働ワーク
17 固定ワーク
18 係止部材
1801 本体部
1802 係止部
19 θ軸稼働ワーク
20 回転体
21 壁部
22 ホルダー
2201 センシング孔
23 刃物
24 撮影用カメラ
25 レール部
26 θ軸稼働機構
27 θ軸稼働用モーター
28 第3のボールネジ
2901 連結部材
2902 ユニット枠
2903 スライダー
2904 スライド部材
30 ホルダー
3001 挟持部
3101 ローラー
3102 挿入ピン
32 軸受クランプ
3201 挟持片
33 フレーム枠
34 スライド板
35 第4のボールネジ
36 装着板
37 昇降用可動部材
38 昇降用ガイド
39 連結棒
40 昇降用モーター
41 ベルト
42 大プーリー
43 基材
44 打ち抜きパターン
45 マーク
46 モニター
Claims (4)
- 基台(2)と、該基台(2)の上方に備えた台盤(3)と、該台盤(3)に載置した基材(43)を前記台盤(3)の長手方向へ移動するためのX軸稼動機構と、前記台盤(3)上に昇降自在に備えられるとともに、Y軸稼動機構によって前記台盤(3)の長手方向に直交する方向に移動自在とされた打抜ヘッド(13)と、制御部と、を備え、前記打抜ヘッド(13)の下方に配置した基材(43)に印刷された打ち抜きパターン(44)を打ち抜くためのプレス装置であって、
前記X軸稼動機構は、X軸稼動用モーター(6)と、該X軸稼動用モーター(6)のモーター軸に連結した第1のボールネジと、該第1のボールネジに螺合された、前記台盤(3)上に配設されたチャック(9)を備えた可動板(8)と、を具備し、前記X軸稼動用モーター(6)を駆動して前記第1のボールネジを回動することで前記チャック(9)を前記台盤(3)の長手方向へ往復移動自在とし、
前記打抜ヘッド(13)は、前記台盤(3)の長手方向に直交する方向に向けて備えたガイドレール(14)にガイドレール(14)の長手方向へ往復移動自在に連結したレールベアリング(15)と、該レールベアリング(15)に固定したY軸稼働ワーク(16)と、該Y軸稼働ワーク(16)に連結された固定ワーク(17)と、係止部材(18)を介して前記固定ワーク(17)に回動自在に連結され、θ軸稼動機構を介して回動される、センシング孔(2201)を有するとともに刃物(23)が装着されるホルダー(22)を備えたθ軸稼動ワーク(19)と、該θ軸稼動ワーク(19)内に配設した撮影用カメラ(24)と、前記Y軸稼働ワーク(16)に連結したレール部(25)と、を具備し、
前記Y軸稼動機構は、Y軸稼動用モーター(10)と、該Y軸稼動用モーター(10)のモーター軸に連結した第2のボールネジ(11)と、該第2のボールネジ(11)に螺合されるとともに前記打抜ヘッド(13)のレール部(25)が昇降自在に係止された連結体(12)と、を具備し、前記Y軸稼動用モーター(10)を駆動して第2の前記ボールネジ(11)を回動することで、前記連結体(12)を第2のボールネジ(11)の長手方向へ往復移動するとともに前記打抜ヘッド(13)を同方向へ往復移動自在とし、
前記θ軸稼動機構(26)は、θ軸稼動用モーター(27)と、該θ軸稼動用モーター(27)のモーター軸に連結された第3のボールネジ(28)と、前記固定ワーク(17)にスライド自在に連結されたスライド部材(2904)と、該スライド部材(2904)に連結されたホルダー(30)と、該ホルダー(30)に回動自在に連結されるとともに、前記θ軸稼動ワーク(19)に連結した軸受クランプ(32)に挟持されたローラー(3101)と、を具備し、前記θ軸稼働用モーター(27)を駆動して前記第3のボールネジ(28)を回動することで、前記スライド部材(2904)を前記固定ワーク(17)に対してスライドさせるとともに前記ホルダー(30)をスライドさせ、これにより前記ローラー(3101)によって前記軸受クランプ(32)を押圧して前記回転体(20)を回転可能として、
前記制御部は、前記撮影用カメラ(24)により撮影した前記基材に印刷されたマークの位置信号を受けて、前記マークが予め設定した位置になるように、前記X軸稼動用モーター(6)、Y軸稼動用モーター(10)、及びθ軸稼動用モーター(27)の作動を制御して前記打抜ヘッド(13)の位置を調整する、
ことを特徴とするプレス装置。 - 前記回転体(20)にフレーム(33)を装着し、該フレーム(33)内にスライド自在にスライド板(34)を配設するとともに、該スライド板(34)を第4のボールネジ(35)に螺合させ、前記スライド板(34)の下面に装着板(36)を連結し、該装着板(36)に前記撮影用カメラ(24)を装着したことを特徴とする請求項1に記載のプレス装置。
- 前記ガイドレール(14)に下方に向けて昇降用可動部材(37)を連結し、該昇降用可動部材(37)を昇降用ガイド(38)に上下動自在に係合するとともに前記昇降用可動部材(37)に連結棒(39)の一端を回動自在に連結し、該連結棒(39)の他端を、ベルト(41)を介して昇降用モータ(40)に連結された大プーリー(42)の中心軸から外れた箇所に回動自在に連結し、昇降用モーター(40)を駆動することで、前記大プーリー(42)及び連結棒(39)を介して前記昇降用可動部材(37)を下方に引き、これにより前記打抜ヘッド(13)を昇降可能としたことを特徴とする請求項1又は請求項2に記載のプレス装置。
- 請求項1乃至請求項3のいずれかのプレス装置を用いて、基材(43)に印刷された打ち抜きパターン(44)を打ち抜くためのプレス方法であって、
前記X軸稼動機構によって基材(43)を前記打抜ヘッド(13)の下方に移動させ、
基材(43)に印刷されているマーク(45)を撮影用カメラ(24)によって撮影し、該撮影したマーク(45)の位置信号を制御部に送信するとともに、制御部においてマーク(45)の位置信号と予め記憶している位置情報とを比較し、
マーク(45)の位置信号と予め記憶している位置情報とが異なっている場合には、前記X軸稼動用モーター(6)、Y軸稼動用モーター(11)、θ軸稼動用モーター(27)を作動させて、打抜ヘッド(13)の位置を、打抜パターン(44)を正確に打ち抜く位置に補正し、
その後、撮影用カメラ(24)を介して、基材(43)に印刷されているマーク(45)を再度確認し、打抜ヘッド(13)の位置が正確な位置に配置されている場合に、打抜ヘッド(13)によってパターン(44)を打ち抜く、ことを特徴とするプレス方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008197409A JP4376951B1 (ja) | 2008-07-31 | 2008-07-31 | プレス装置及びそれを用いたプレス方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008197409A JP4376951B1 (ja) | 2008-07-31 | 2008-07-31 | プレス装置及びそれを用いたプレス方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4376951B1 JP4376951B1 (ja) | 2009-12-02 |
| JP2010030017A true JP2010030017A (ja) | 2010-02-12 |
Family
ID=41459708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008197409A Active JP4376951B1 (ja) | 2008-07-31 | 2008-07-31 | プレス装置及びそれを用いたプレス方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4376951B1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101624220B1 (ko) * | 2014-10-21 | 2016-05-26 | 주식회사 테크아이 | 롤 비전 프레스 |
| CN107139264A (zh) * | 2016-03-01 | 2017-09-08 | 顶瑞机械股份有限公司 | 裁切装置 |
| CN111216169A (zh) * | 2019-12-02 | 2020-06-02 | 浙江慧诚包装材料有限公司 | 一种纸板裁切设备 |
| WO2021088096A1 (zh) * | 2019-11-08 | 2021-05-14 | 易力声科技(深圳)有限公司 | 一种音控主板背胶和sr保压自动机 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107293512B (zh) * | 2017-08-05 | 2023-12-05 | 广州明森科技股份有限公司 | 一种多芯智能卡的芯片封装装置 |
| CN109047456B (zh) * | 2018-09-02 | 2019-11-22 | 周哉云 | 一种联动式三步自检测冲孔装置 |
-
2008
- 2008-07-31 JP JP2008197409A patent/JP4376951B1/ja active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101624220B1 (ko) * | 2014-10-21 | 2016-05-26 | 주식회사 테크아이 | 롤 비전 프레스 |
| CN107139264A (zh) * | 2016-03-01 | 2017-09-08 | 顶瑞机械股份有限公司 | 裁切装置 |
| CN107139264B (zh) * | 2016-03-01 | 2022-11-18 | 顶瑞机械股份有限公司 | 裁切装置 |
| WO2021088096A1 (zh) * | 2019-11-08 | 2021-05-14 | 易力声科技(深圳)有限公司 | 一种音控主板背胶和sr保压自动机 |
| CN111216169A (zh) * | 2019-12-02 | 2020-06-02 | 浙江慧诚包装材料有限公司 | 一种纸板裁切设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4376951B1 (ja) | 2009-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4376951B1 (ja) | プレス装置及びそれを用いたプレス方法 | |
| KR100955449B1 (ko) | 천공 방법 및 천공 장치 | |
| US6874395B2 (en) | Punching device and workpiece processing method | |
| US10716250B2 (en) | Component mounting apparatus | |
| JP4210692B2 (ja) | 穿孔装置 | |
| JP2009143110A (ja) | スクリーン印刷機 | |
| JP4522366B2 (ja) | 穿孔装置 | |
| JP4503635B2 (ja) | ワーク位置決め装置 | |
| TWI221438B (en) | Perforating device and method for plate-like works | |
| JP2010131792A (ja) | スクリーン印刷装置 | |
| JP2006212754A (ja) | 部品の打ち抜き方法 | |
| KR20160126122A (ko) | 연성회로기판 보호용 커버레이 천공장치 | |
| JP2561166B2 (ja) | プリント基板の穴明け方法及びその装置 | |
| TWI235701B (en) | Perforating device | |
| JP6738898B2 (ja) | 対基板作業機 | |
| JP2008307719A (ja) | スクリーン印刷機及び印刷位置補正方法 | |
| JP2001341099A (ja) | 穿孔装置 | |
| JP2007266334A (ja) | 電子部品装着方法及び装置 | |
| KR100381810B1 (ko) | 플랙시블 프린트기판의 가이드마크 타발장치 | |
| JPH1170436A (ja) | 板状ワークの搬送装置 | |
| JP3112737U (ja) | プレス装置 | |
| JP2002263750A (ja) | パンチ金型 | |
| JP2008307718A (ja) | スクリーン取付構造 | |
| JP3737978B2 (ja) | 電子部品の吸着ノズル | |
| JP2008116867A (ja) | 刷版識別装置および刷版製造装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090909 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120918 Year of fee payment: 3 |