JP2010023759A - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP2010023759A JP2010023759A JP2008189824A JP2008189824A JP2010023759A JP 2010023759 A JP2010023759 A JP 2010023759A JP 2008189824 A JP2008189824 A JP 2008189824A JP 2008189824 A JP2008189824 A JP 2008189824A JP 2010023759 A JP2010023759 A JP 2010023759A
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- rotational speed
- speed
- clutch
- rotation speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/387—Actuated clutches, i.e. clutches engaged or disengaged by electric, hydraulic or mechanical actuating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/101—Infinitely variable gearings
- B60W10/105—Infinitely variable gearings of electric type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/081—Speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H2037/0866—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft
- F16H2037/0873—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft with switching, e.g. to change ranges
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/915—Specific drive or transmission adapted for hev
- Y10S903/917—Specific drive or transmission adapted for hev with transmission for changing gear ratio
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19014—Plural prime movers selectively coupled to common output
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19251—Control mechanism
Abstract
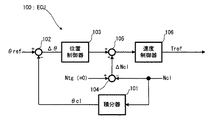
【解決手段】動力分割機構300にクラッチ機構350を備えたハイブリッド車両10において、ECU100は、変速制御を実行する。当該制御において、クラッチ機構350のクラッチ板同士を係合させる必要が生じると、ECU100は、係合準備処理を実行する。当該処理において、係合要素たるクラッチ板351の回転速度たるクラッチ回転速度Nclが基準値Ncl以下に低下すると、ECU100は、クラッチ板351の回転同期及び位置同期を図るためのフィードバック制御において参照されるクラッチ回転速度Nclの参照値を、クラッチ板351に付設された第1回転センサ600のパルス信号から算出された算出値から、各モータジェネレータの回転速度を検出するための第2及び第3回転センサのパルス信号から推定された推定値に切り替える。
【選択図】図5
Description
以下、図面を参照して、本発明の好適な実施形態について説明する。
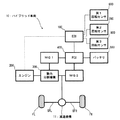
始めに、図1を参照し、本発明の一実施形態に係るハイブリッド車両10の構成について説明する。ここに、図1は、ハイブリッド車両10の構成を概念的に表してなる概略構成図である。
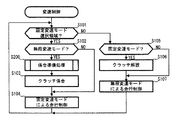
<変速モードの詳細>
動力分割機構300は、ハイブリッド車両10の変速装置として機能する。この際、動力分割機構300では、無段変速モードと固定変速モードの二種類の変速モードが実現される。
Claims (4)
- 内燃機関と、第1電動機と、駆動軸に連結された第2電動機とを動力源として備え、
回転同期状態において相互に係合可能な第1係合要素及び第2係合要素を含む係合手段と、
前記第1係合要素の回転速度たる第1回転速度を検出可能な第1検出手段と、
相互に差動回転可能に構成された、前記内燃機関の出力軸に連結される第1回転要素、前記第1電動機の出力軸に連結される第2回転要素、前記第2電動機の出力軸に連結される第3回転要素及び前記第1係合要素に連結される第4回転要素を少なくとも含む複数の回転要素を有する動力分割手段と、
前記複数の回転要素のうち前記第4回転要素を除く他の回転要素の回転速度たる第2回転速度を検出可能な第2検出手段と
を備え、
前記第1係合要素と前記第2係合要素とを係合させるに際し、前記第1回転速度を前記回転同期状態に対応する目標回転速度に収束させるためのフィードバック制御がなされるハイブリッド車両の制御装置であって、
前記検出された第1回転速度が所定の低回転領域に該当するか否かを判別する判別手段と、
前記検出された第1回転速度が前記所定の低回転領域に該当する旨が判別された場合に、前記検出された第2回転速度に基づいて前記第1回転速度を推定する推定手段と、
前記検出された第1回転速度が前記所定の低回転領域に該当する旨が判別された場合に、前記フィードバック制御においてフィードバック制御量を決定するに際し参照される前記第1回転速度を、前記検出された第1回転速度から前記推定された第1回転速度へ切り替える切り替え制御手段と
を具備することを特徴とするハイブリッド車両の制御装置。 - 前記判別手段は、前記検出された第1回転速度が所定の基準値未満である場合に前記検出された第1回転速度が前記所定の低回転領域に該当すると判別する
ことを特徴とする請求項1に記載のハイブリッド車両の制御装置。 - 前記第1及び第2係合要素は、位置同期状態において相互に係合可能に構成され、
前記フィードバック制御においては、前記第1係合要素と前記第2係合要素とが前記位置同期状態となるように前記参照される第1回転速度に基づいて前記第1係合要素の位置制御がなされ、
前記切り替え制御手段は、前記参照される第1回転速度を前記推定された第1回転速度へ切り替える際に、切り替え時点に同期して前記推定された第1回転速度を参照した前記位置制御が開始されるように、前記第2検出手段における前記位置制御の基準を規定する原点位置を設定する
ことを特徴とする請求項1又は2に記載のハイブリッド車両の制御装置。 - 前記ハイブリッド車両は、前記第1係合要素が前記第2係合要素から解放されてなる解放状態にある場合に、前記第2回転要素が前記内燃機関の出力トルクの反力トルクを負担することにより、変速モードとして前記内燃機関の出力軸と前記駆動軸との回転速度比を連続変化させることが可能な無段変速モードを採り、前記第1係合要素が前記第2係合要素と係合してなる係合状態にある場合に、前記第1係合要素の回転が阻止され、前記第4回転要素が前記反力トルクを負担することにより、前記変速モードとして前記回転速度比を所定値に固定する固定変速モードを採ることが可能に構成される
ことを特徴とする請求項1から3のいずれか一項に記載のハイブリッド車両の制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008189824A JP4430723B2 (ja) | 2008-07-23 | 2008-07-23 | ハイブリッド車両の制御装置 |
| US12/500,958 US8095255B2 (en) | 2008-07-23 | 2009-07-10 | Control apparatus for hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008189824A JP4430723B2 (ja) | 2008-07-23 | 2008-07-23 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010023759A true JP2010023759A (ja) | 2010-02-04 |
| JP4430723B2 JP4430723B2 (ja) | 2010-03-10 |
Family
ID=41569379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008189824A Expired - Fee Related JP4430723B2 (ja) | 2008-07-23 | 2008-07-23 | ハイブリッド車両の制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8095255B2 (ja) |
| JP (1) | JP4430723B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112319460A (zh) * | 2020-11-11 | 2021-02-05 | 同济大学 | 一种双行星排功率分流混合动力系统的构型优化方法 |
| JP2021526997A (ja) * | 2018-08-17 | 2021-10-11 | 寧波上中下自動変速器有限公司Ningbo Umd Automatic Transmission Co., Ltd. | ハイブリッド車輌用パワーシステム |
| US20220176940A1 (en) * | 2020-12-04 | 2022-06-09 | Hyundai Motor Company | Method and device for controlling charging of vehicle battery |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112010003165T5 (de) * | 2009-06-25 | 2012-11-08 | Fisker Automotive, Inc. | Direkte elektrische verbindung für ein mehrmotorigeshybridantriebssystem |
| GB2487731B (en) * | 2011-02-01 | 2018-05-02 | Jaguar Land Rover Ltd | Hybrid electric vehicle controller and method of controlling a hybrid electric vehicle |
| EP2748670B1 (en) | 2011-08-24 | 2015-11-18 | Rockwell Collins, Inc. | Wearable data display |
| EP2832608B1 (en) * | 2012-03-26 | 2019-10-09 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle drive control device |
| JP5983640B2 (ja) * | 2014-01-20 | 2016-09-06 | トヨタ自動車株式会社 | モータジェネレータの制御装置 |
| JP6229690B2 (ja) * | 2014-06-12 | 2017-11-15 | トヨタ自動車株式会社 | 車両用駆動装置 |
| CN106314125A (zh) * | 2016-08-19 | 2017-01-11 | 福建农林大学 | 一种用于增程式电动车的动力合成机构 |
| JP6569632B2 (ja) * | 2016-09-29 | 2019-09-04 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6546967B2 (ja) * | 2017-07-10 | 2019-07-17 | 本田技研工業株式会社 | 動力装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3706675B2 (ja) | 1996-05-16 | 2005-10-12 | 本田技研工業株式会社 | 電動車両におけるモータ駆動制御装置 |
| JP2001001779A (ja) | 1999-06-22 | 2001-01-09 | Honda Motor Co Ltd | 前後輪駆動車両 |
| JP2001171369A (ja) | 1999-10-06 | 2001-06-26 | Daihatsu Motor Co Ltd | ハイブリッド自動車の制御装置 |
| GB2375576A (en) | 2001-05-19 | 2002-11-20 | Luk Lamellen & Kupplungsbau | Gear changing method and apparatus |
| JP4471091B2 (ja) | 2004-03-22 | 2010-06-02 | 株式会社豊田中央研究所 | 回転体制御装置及び方法 |
| JP4140581B2 (ja) | 2004-08-19 | 2008-08-27 | 日産自動車株式会社 | ハイブリッド車の締結要素故障診断装置 |
| JP4244944B2 (ja) * | 2005-03-16 | 2009-03-25 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4614811B2 (ja) * | 2005-04-04 | 2011-01-19 | トヨタ自動車株式会社 | 駆動装置およびこれを搭載する自動車並びに駆動装置の制御方法 |
| EP1762452A3 (en) * | 2005-09-08 | 2009-05-27 | Nissan Motor Co., Ltd. | Engine starting control device and method |
| JP4052329B2 (ja) * | 2005-10-26 | 2008-02-27 | トヨタ自動車株式会社 | 自動変速機の変速制御装置 |
| JP4069941B2 (ja) * | 2005-10-26 | 2008-04-02 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4341631B2 (ja) * | 2006-01-31 | 2009-10-07 | トヨタ自動車株式会社 | 車両の異常判定装置 |
| JP4396661B2 (ja) * | 2006-05-26 | 2010-01-13 | 日産自動車株式会社 | ハイブリッド車両のクラッチ締結制御装置 |
| JP2008247251A (ja) * | 2007-03-30 | 2008-10-16 | Toyota Motor Corp | 動力出力装置およびその制御方法並びに車両、駆動装置 |
-
2008
- 2008-07-23 JP JP2008189824A patent/JP4430723B2/ja not_active Expired - Fee Related
-
2009
- 2009-07-10 US US12/500,958 patent/US8095255B2/en not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021526997A (ja) * | 2018-08-17 | 2021-10-11 | 寧波上中下自動変速器有限公司Ningbo Umd Automatic Transmission Co., Ltd. | ハイブリッド車輌用パワーシステム |
| US11267329B2 (en) | 2018-08-17 | 2022-03-08 | Ningbo Umd Automatic Transmission Co., Ltd | Power system for hybrid vehicle |
| JP7053951B2 (ja) | 2018-08-17 | 2022-04-12 | 寧波上中下自動変速器有限公司 | ハイブリッド車輌用パワーシステム |
| CN112319460A (zh) * | 2020-11-11 | 2021-02-05 | 同济大学 | 一种双行星排功率分流混合动力系统的构型优化方法 |
| US20220176940A1 (en) * | 2020-12-04 | 2022-06-09 | Hyundai Motor Company | Method and device for controlling charging of vehicle battery |
| US11584356B2 (en) * | 2020-12-04 | 2023-02-21 | Hyundai Motor Company | Method and device for controlling charging of vehicle battery |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100023193A1 (en) | 2010-01-28 |
| JP4430723B2 (ja) | 2010-03-10 |
| US8095255B2 (en) | 2012-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4430723B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4566233B2 (ja) | ハイブリッド駆動装置の制御装置 | |
| US8469859B2 (en) | Control apparatus for hybrid vehicle | |
| JP5846217B2 (ja) | 内燃機関の停止制御装置 | |
| JP4450068B2 (ja) | ハイブリッド駆動装置の制御装置 | |
| US8509979B2 (en) | Control apparatus for hybrid vehicle | |
| JP5472541B1 (ja) | 内燃機関の停止制御装置 | |
| JP2009234359A (ja) | ハイブリッド駆動装置の制御装置 | |
| JP2009274671A (ja) | ハイブリッド自動車およびその制御方法 | |
| JP4793278B2 (ja) | 車両およびその制御方法 | |
| JP4586929B1 (ja) | ハイブリッド車両の制御装置 | |
| JP2012086735A (ja) | ハイブリッド車両の制御装置 | |
| JP2010143281A (ja) | ハイブリッド駆動装置の制御装置 | |
| JP2012081793A (ja) | ハイブリッド車両の制御装置 | |
| JP5444837B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2010158979A (ja) | 車両の制御装置 | |
| JP2012192885A (ja) | ハイブリッド車両の制御装置 | |
| JP5510165B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2012056421A (ja) | ハイブリッド車両の制御装置 | |
| JP5831359B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5217954B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2009298174A (ja) | ハイブリッド駆動装置の制御装置 | |
| JP2012046133A (ja) | ハイブリッド車両の制御装置 | |
| JP2012171598A (ja) | ハイブリッド車両の制御装置 | |
| JP2012035653A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091208 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091217 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313532 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131225 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |