JP2010014664A - 目標追尾装置および目標追尾方法 - Google Patents
目標追尾装置および目標追尾方法 Download PDFInfo
- Publication number
- JP2010014664A JP2010014664A JP2008176969A JP2008176969A JP2010014664A JP 2010014664 A JP2010014664 A JP 2010014664A JP 2008176969 A JP2008176969 A JP 2008176969A JP 2008176969 A JP2008176969 A JP 2008176969A JP 2010014664 A JP2010014664 A JP 2010014664A
- Authority
- JP
- Japan
- Prior art keywords
- target
- tracking
- side lobe
- range side
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 24
- 238000004364 calculation method Methods 0.000 claims abstract description 44
- 238000001514 detection method Methods 0.000 claims description 26
- 230000006866 deterioration Effects 0.000 abstract description 8
- 230000006835 compression Effects 0.000 description 10
- 238000007906 compression Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 3
- 239000006185 dispersion Substances 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images


Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】目標の信号を検出する目標検出器10と、目標検出器10により検出した信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブとの相関の程度を計算し、レンジサイドローブ相関処理の相関計算結果から重み付け計算によって目標検出器10により検出した信号に対し重み付けを行い、重み付け計算の結果を考慮したMHT(Multiple Hypothesis Tracking)により追尾処理を行う追尾処理器20と、追尾処理器20の結果を表示するための航跡表示器30を備える。
【選択図】図1
Description
特許文献1(特開2002−98755号公報)には、「観測ベクトルと航跡の相関に関して、それぞれの観測ベクトルが既存航跡と相関する可能性、新航跡である可能性、誤信号である可能性を考慮し、複数の仮説を維持しつつ追尾処理を行う延期決定型の目標追尾装置において、航跡相関行列と既存の仮説から新しい仮説を作成する仮説更新部が、仮説の信頼度計算に目標観測装置からのそれぞれの観測ベクトル毎に得られる情報を利用することを特徴とする目標追尾装置」が記載されている。
なお、「時刻t−1の航跡」に対し、「時刻tに検出した目標の信号」が、「時刻t−1の航跡」の目標信号であると仮定した場合、その仮定を「仮説」といい、その仮定に対する確からしさを「信頼度」という。
また、従来のレーダー装置では、S/N比を具体的に目標追尾に組み込む方法は示されていない。
一般的に、目標を検出するためにパルス圧縮技術が用いられる。
パルス圧縮を実施すると、レンジサイドローブと呼ばれる不要信号が目標信号の近傍に現れる。
従来では、レンジサイドローブの対策として、パルス圧縮時にウェイティング手法を利用してレンジサイドローブを用いているが、目標信号のS/N比が低くなるというデメリットがある。
パルス自体の電力は保持されるため、圧縮後のパルスの振幅は、圧縮前より大きくなり、目標を探知し易くなる。
また、「ウェイティング」とは、パルス圧縮時に発生するレンジサイドローブを抑圧する処理のことをいう。
一般に、ウェイティングを行うと、S/N比の劣化を伴い、探知距離が減る。
本発明では、S/N比の劣化を防ぐためにウェイティンクを削除している。
上記目標検出ステップにおいて検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理ステップ、上記レンジサイドローブ相関処理ステップにおける相関計算結果から上記目標検出ステップにおいて検出した上記目標の信号に対して重み付け計算を行う重み付け計算ステップ、上記重み付け計算ステップにおける重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)処理ステップを有し、上記目標の追尾処理を行う追尾処理ステップと、上記追尾処理ステップにおける目標対追尾結果を表示する航跡表示ステップからなるものである。
また、パルス圧縮におけるウェイティングをすることなく、レンジサイドローブにより発生する誤航跡を抑圧することができるため、ウェイティングによる信号レベルの劣化を防ぐことができる。
以下、図面に基づいてこの発明の実施の形態1について説明する。
図1は、実施の形態1による目標追尾装置の構成を示すブロック図である。
図1において、10は受信信号から目標の信号(即ち、目標で反射されてくるレーダー信号)を検出するための目標検出器(目標検出手段)、20は目標検出器(目標検出手段)10が検出する検出信号に対し追尾処理を行うための追尾処理器(追尾処理手段)、30は追尾処理器(追尾処理手段)20により得られる追尾処理の結果(即ち、航跡)を表示するための航跡表示器(航跡表示手段)である。
そして、その仮説は検出した信号分について発生する。
追尾動作を維持するためには、複数の仮説の中から航跡に対する目標信号を判定しなければならない。
従って、各仮説に対して、現在追尾中の目標である確率を計算し、航跡と目標信号との対応に様々な組み合わせが考えられて1つに決められない場合、確からしい複数の仮説を保持しながら追尾を維持する。このようなアルゴリズムを“MHT”という。
まず、目標検出器10により検出された目標の信号が追尾処理器20へ出力される。
次に、目標検出器10から出力された信号は、追尾処理器20において、以前の追尾結果から算出された目標の予測位置と目標検出器10から出力される信号との相関を計算し、追尾対象となる目標の信号を算出する追尾処理を行う。
追尾処理の際に、レンジサイドローブによる誤目標追尾を抑圧するため、レンジサイドローブ相関処理手段21は、検出した目標の観測ベクトルとS/N比からレンジサイドローブパターン22との相関を計算し、レンジサイドローブである確からしさを求め、レンジサイドローブである確からしさが高い目標については相関対象から外す処理を行う。
このように、本実施の形態においては、レンジサイドローブによる誤目標追尾が抑圧できるため、レンジサイドローブ自体を抑圧する際に生じる、信号レベルの劣化を防ぐことができ、レーダーの性能は向上することが期待できる。
レンジサイドローブパターン22は、予めシミュレーション等により、ビームごとに、ノイズフリーで第1サイドローブから第kサイドローブ(kはパラメータ)までのメインローブとのレンジ差ΔRk、S/N差ΔPkを求めておく。
また、重み付けを考慮したMHTの信頼度計算を式(1)に示す。
なお、MHT信頼度計算式を示す式(1)において、Pl(Zm)およびPs(Zm)が重み付けに相当している。
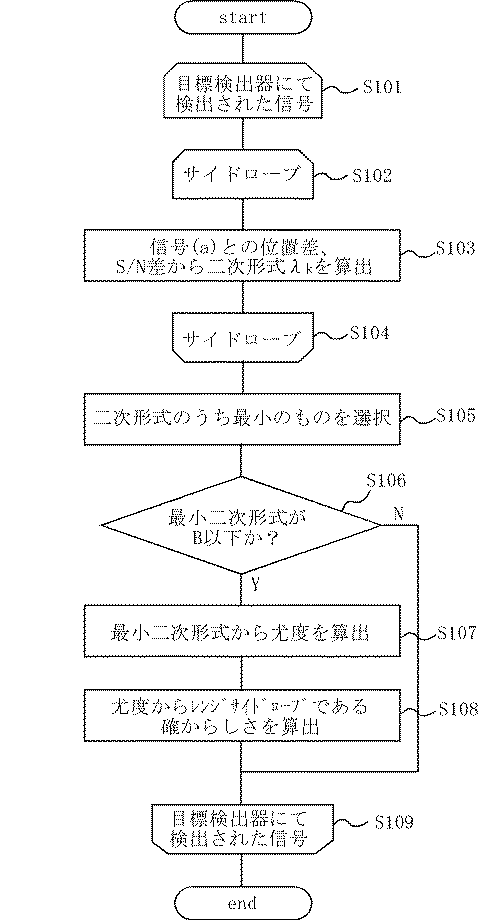
まず、当該信号(即ち、目標検出器10にて検出された信号)を中心にした所定の距離、方位角、仰角のゲート内に、当該信号のS/N比より大きい信号(信号(a)と呼ぶ)の有無を調べる。(ステップS101)
信号(a)が無い場合、当該信号については、重み付けを行わないが、信号(a)が有る場合、当該信号についてレンジ差およびS/N差から、レンジサイドローブパターンにおいて、該当すると思われるレンジサイドローブを抽出する。(ステップS102)
ステップS101において、目標検出器10にて検出された信号を中心にした所定の距離、方位角、仰角のゲート内に、当該信号のS/N比より大きい信号(信号(a)が有る場合、当該信号とレンジサイドローブのレンジ差△RkおよびS/N比の差△Pkから、当該信号と信号(a)とのレンジ差△R0およびS/N比の差△P0との分散値を算出し、パラメータとして設定しているレンジ差およびS/N比の差の分散値σRk2、σPk2と比較した結果を式(2)の2次形式λkとして算出する。
信号(a)に対して、第1レンジサイドローブから第nレンジサイドローブについて、式(2)を算出する。(ステップS103)
ステップS106での判定後、λminが所定の閾値(B)以下でない場合には、レンジサイドローブとの相関はなく、目標とは異なるとして扱う。
ステップS106での判定後、λminが所定の閾値(B)以下であると判定した場合は、正規分布の密度関数から尤度gを式(3)に基づいて算出する。(ステップS107)
Psは0から1の値でありね1に近いほどレンジサイドローブである可能性が高いと見なす。
重み付けについては、式(1)のMHT信頼度計算式にステップ106で求めた確率が反映されている。
レンジサイドローブである確率Psが大きいならば、当該信号を不要信号として扱い、航跡確立の確立を低くし、誤航跡の発生を抑圧する。
20 追尾処理器(追尾処理手段)
21 レンジサイドローブ相関処理手段
22 レンジサイドローブパターン
23 重み付け(ウェイティング)計算手段
24 MHT(Multiple Hypothesis Tracking)
30 航跡表示器(航跡表示手段)
Claims (2)
- 目標の信号を検出する目標検出手段と、
上記目標検出手段により検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理手段、上記レンジサイドローブ相関処理手段の相関計算結果から上記目標検出手段により検出した上記目標の信号に対して重み付け計算を行う重み付け計算手段、上記重み付け計算手段による重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)で構成され、上記目標の追尾処理を行う追尾処理手段と、
上記追尾処理手段による目標対追尾結果を表示する航跡表示手段を備えたことを特徴とする目標追尾装置。 - 目標の信号を検出する目標検出カステップと、
上記目標検出ステップにおいて検出した上記目標の信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブ相関処理によりレンジサイドローブとの相関の程度を計算するレンジサイドローブ相関処理ステップ、上記レンジサイドローブ相関処理ステップにおける相関計算結果から上記目標検出ステップにおいて検出した上記目標の信号に対して重み付け計算を行う重み付け計算ステップ、上記重み付け計算ステップにおける重み付け計算の結果を反映して検出した信号の仮説の信頼度計算を実施して上記目標の信号の誤検出を抑圧するMHT(Multiple Hypothesis Tracking)処理ステップを有し、上記目標の追尾処理を行う追尾処理ステップと、
上記追尾処理ステップにおける目標対追尾結果を表示する航跡表示ステップからなることを特徴とする目標追尾方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008176969A JP5379415B2 (ja) | 2008-07-07 | 2008-07-07 | 目標追尾装置および目標追尾方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008176969A JP5379415B2 (ja) | 2008-07-07 | 2008-07-07 | 目標追尾装置および目標追尾方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010014664A true JP2010014664A (ja) | 2010-01-21 |
| JP5379415B2 JP5379415B2 (ja) | 2013-12-25 |
Family
ID=41700897
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008176969A Active JP5379415B2 (ja) | 2008-07-07 | 2008-07-07 | 目標追尾装置および目標追尾方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5379415B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111289954A (zh) * | 2020-03-31 | 2020-06-16 | 四川长虹电器股份有限公司 | 用于毫米波雷达目标跟踪的点云划分与航迹匹配方法 |
| CN113589252A (zh) * | 2021-08-03 | 2021-11-02 | 东风汽车集团股份有限公司 | 一种基于mht算法的多雷达传感器多目标跟踪方法 |
| JP7537750B2 (ja) | 2021-02-26 | 2024-08-21 | 株式会社光電製作所 | レーダ受信機、サイドローブ抑圧装置 |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58113773A (ja) * | 1981-12-26 | 1983-07-06 | Mitsubishi Electric Corp | パルス圧縮レ−ダ |
| JPS58195172A (ja) * | 1982-05-08 | 1983-11-14 | Mitsubishi Electric Corp | レ−ダ装置 |
| JPH04113290A (ja) * | 1990-09-04 | 1992-04-14 | Tech Res & Dev Inst Of Japan Def Agency | 多目標追尾方法及びその装置 |
| JPH10115678A (ja) * | 1996-10-15 | 1998-05-06 | Mitsubishi Electric Corp | 目標相関統合装置 |
| JPH10197624A (ja) * | 1997-01-16 | 1998-07-31 | Tech Res & Dev Inst Of Japan Def Agency | 信号抽出装置 |
| JPH11231043A (ja) * | 1998-02-17 | 1999-08-27 | Tech Res & Dev Inst Of Japan Def Agency | パルス圧縮方法及び装置 |
| JP2000221265A (ja) * | 1999-02-03 | 2000-08-11 | Mitsubishi Electric Corp | 目標相関統合装置 |
| JP2002098755A (ja) * | 2000-09-22 | 2002-04-05 | Mitsubishi Electric Corp | 目標追尾装置 |
| JP2002328164A (ja) * | 2001-05-02 | 2002-11-15 | Mitsubishi Electric Corp | 目標追尾方法およびレーダシステム |
| JP2004144543A (ja) * | 2002-10-23 | 2004-05-20 | Omron Corp | 物体検知方法および物体検知装置 |
| JP2004219300A (ja) * | 2003-01-16 | 2004-08-05 | Mitsubishi Electric Corp | 目標追尾装置 |
| JP2005127977A (ja) * | 2003-10-27 | 2005-05-19 | Mitsubishi Electric Corp | 目標追尾装置 |
| JP2005148051A (ja) * | 2003-10-22 | 2005-06-09 | Mitsubishi Electric Corp | 不要信号抑圧装置 |
| WO2006013689A1 (ja) * | 2004-08-06 | 2006-02-09 | Murata Manufacturing Co., Ltd. | レーダ |
| JP2007040953A (ja) * | 2005-06-30 | 2007-02-15 | Toshiba Corp | 相関受信処理装置 |
| JP2009128278A (ja) * | 2007-11-27 | 2009-06-11 | Japan Radio Co Ltd | パルス圧縮レーダ装置 |
-
2008
- 2008-07-07 JP JP2008176969A patent/JP5379415B2/ja active Active
Patent Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58113773A (ja) * | 1981-12-26 | 1983-07-06 | Mitsubishi Electric Corp | パルス圧縮レ−ダ |
| JPS58195172A (ja) * | 1982-05-08 | 1983-11-14 | Mitsubishi Electric Corp | レ−ダ装置 |
| JPH04113290A (ja) * | 1990-09-04 | 1992-04-14 | Tech Res & Dev Inst Of Japan Def Agency | 多目標追尾方法及びその装置 |
| JPH10115678A (ja) * | 1996-10-15 | 1998-05-06 | Mitsubishi Electric Corp | 目標相関統合装置 |
| JPH10197624A (ja) * | 1997-01-16 | 1998-07-31 | Tech Res & Dev Inst Of Japan Def Agency | 信号抽出装置 |
| JPH11231043A (ja) * | 1998-02-17 | 1999-08-27 | Tech Res & Dev Inst Of Japan Def Agency | パルス圧縮方法及び装置 |
| JP2000221265A (ja) * | 1999-02-03 | 2000-08-11 | Mitsubishi Electric Corp | 目標相関統合装置 |
| JP2002098755A (ja) * | 2000-09-22 | 2002-04-05 | Mitsubishi Electric Corp | 目標追尾装置 |
| JP2002328164A (ja) * | 2001-05-02 | 2002-11-15 | Mitsubishi Electric Corp | 目標追尾方法およびレーダシステム |
| JP2004144543A (ja) * | 2002-10-23 | 2004-05-20 | Omron Corp | 物体検知方法および物体検知装置 |
| JP2004219300A (ja) * | 2003-01-16 | 2004-08-05 | Mitsubishi Electric Corp | 目標追尾装置 |
| JP2005148051A (ja) * | 2003-10-22 | 2005-06-09 | Mitsubishi Electric Corp | 不要信号抑圧装置 |
| JP2005127977A (ja) * | 2003-10-27 | 2005-05-19 | Mitsubishi Electric Corp | 目標追尾装置 |
| WO2006013689A1 (ja) * | 2004-08-06 | 2006-02-09 | Murata Manufacturing Co., Ltd. | レーダ |
| JP2007040953A (ja) * | 2005-06-30 | 2007-02-15 | Toshiba Corp | 相関受信処理装置 |
| JP2009128278A (ja) * | 2007-11-27 | 2009-06-11 | Japan Radio Co Ltd | パルス圧縮レーダ装置 |
Non-Patent Citations (1)
| Title |
|---|
| JPN6012043445; 小幡 康 , 亀田 洋志 , 系 正義 , 辻道 信吾 , 小菅 義夫: '航跡型MHTによる追尾開始性能のシミュレーション評価' 電子情報通信学会技術研究報告. SANE, 宇宙・航行エレクトロニクス 99(654), 20000225, 79-86, 社団法人電子情報通信学会 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111289954A (zh) * | 2020-03-31 | 2020-06-16 | 四川长虹电器股份有限公司 | 用于毫米波雷达目标跟踪的点云划分与航迹匹配方法 |
| JP7537750B2 (ja) | 2021-02-26 | 2024-08-21 | 株式会社光電製作所 | レーダ受信機、サイドローブ抑圧装置 |
| CN113589252A (zh) * | 2021-08-03 | 2021-11-02 | 东风汽车集团股份有限公司 | 一种基于mht算法的多雷达传感器多目标跟踪方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5379415B2 (ja) | 2013-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4670446B2 (ja) | レーダ信号処理装置及びそれに用いるcfar処理方法 | |
| US9453911B2 (en) | Target tracking system and target tracking method | |
| RU2004130472A (ru) | Адаптивная система и способ обнаружения цели | |
| JP2008170287A (ja) | レーダ装置 | |
| KR20160094728A (ko) | 위성 항법해를 생성하는 장치 및 방법 | |
| KR20140083568A (ko) | 레퍼런스 셀 분할 평균 기법에 의한 cfar 검파 방법 및 이를 적용한 레이더 시스템 | |
| JP5379415B2 (ja) | 目標追尾装置および目標追尾方法 | |
| JP2010276475A (ja) | 目標追跡装置及び目標追跡方法 | |
| JP2013007578A (ja) | 信号検出装置、信号検出方法及び信号検出プログラム | |
| US8416118B1 (en) | Chaff cloud detection and centroid estimation | |
| KR101041926B1 (ko) | 최소값 선택 추정방식을 이용한 잡음재밍 추정방법 | |
| JP2005337732A (ja) | レーダ装置 | |
| KR102011959B1 (ko) | 펄스 압축 과정에서 간섭신호를 탐지하는 레이더 수신신호 처리 방법 및 그를 위한 장치 | |
| JP2008051615A (ja) | 物体検知装置 | |
| KR102092278B1 (ko) | 비균질 클러터 환경에서 표적을 탐지하는 2d go ca-cfar 탐지 방법 및 그 시스템 | |
| KR101770742B1 (ko) | 클러터를 억제하는 표적 탐지 장치 및 그 방법 | |
| JP2007232412A (ja) | 物体検出装置 | |
| JP2009250925A (ja) | レーダ信号処理装置 | |
| JP5991599B2 (ja) | 目標探知装置 | |
| JP6031269B2 (ja) | ノイズ抑圧装置、ノイズ抑圧方法およびノイズ抑圧プログラム | |
| JP4541817B2 (ja) | レーダ信号処理装置 | |
| KR20170054168A (ko) | 레이더 시스템의 씨파를 기반으로 하는 신호 처리 방법 및 그 장치 | |
| JP4046713B2 (ja) | 周波数変調レーダの信号処理装置 | |
| EP2730941B1 (en) | A method of estimating a local plot density in a radar system; a plot density estimator and a radar system with a plot density estimator | |
| KR102216650B1 (ko) | 적응형 가드 셀 선택을 기초로 한 cfar 탐지 방법 및 그 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110520 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130927 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5379415 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |