JP2008166830A - 真空処理方法及び真空処理装置 - Google Patents
真空処理方法及び真空処理装置 Download PDFInfo
- Publication number
- JP2008166830A JP2008166830A JP2008011466A JP2008011466A JP2008166830A JP 2008166830 A JP2008166830 A JP 2008166830A JP 2008011466 A JP2008011466 A JP 2008011466A JP 2008011466 A JP2008011466 A JP 2008011466A JP 2008166830 A JP2008166830 A JP 2008166830A
- Authority
- JP
- Japan
- Prior art keywords
- cassette
- processing
- wafer
- wafers
- vacuum processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
【課題】カセット内のウェハを処理装置に搬送して処理する際、1つのカセット内のウェハに共通の処理を施す処理及び2つのカセットを使用しカセット内のウェハに異なる処理を施す処理を選択的に施す。
【解決手段】少なくとも2つのカセット7−1、7−2を使用し、カセットに収納されたウエハをカセット毎にいずれかの真空処理室へ搬送し、搬送されたウエハに真空処理室毎に異なるレシピを適用する並列処理、及び1つのカセットに収納されたウエハに共通のレシピを適用して処理を施す並列処理の何れかを選択的に施すとともに処理後のウェハを切り替え可能な室を介してもとのカセットに戻し、かつ、いずれかの真空処理室に装置停止の必要が生じたとき、カセットからのウェハの搬出を中断し、真空処理室のウェハをもとのカセットに戻したのち装置停止の必要がない真空処理室に対するカセットからのウェハの搬出を継続し処埋を再開する。
【選択図】図1
【解決手段】少なくとも2つのカセット7−1、7−2を使用し、カセットに収納されたウエハをカセット毎にいずれかの真空処理室へ搬送し、搬送されたウエハに真空処理室毎に異なるレシピを適用する並列処理、及び1つのカセットに収納されたウエハに共通のレシピを適用して処理を施す並列処理の何れかを選択的に施すとともに処理後のウェハを切り替え可能な室を介してもとのカセットに戻し、かつ、いずれかの真空処理室に装置停止の必要が生じたとき、カセットからのウェハの搬出を中断し、真空処理室のウェハをもとのカセットに戻したのち装置停止の必要がない真空処理室に対するカセットからのウェハの搬出を継続し処埋を再開する。
【選択図】図1
Description
本発明は、プロセス処理を行う2つ以上のプロセス処理装置と、ウェハの搬送を行う搬
送処理装置で構成され、少なくとも2つ以上のプロセス処理装置を使って処理する処理方
法及び処理装置に関する。
送処理装置で構成され、少なくとも2つ以上のプロセス処理装置を使って処理する処理方
法及び処理装置に関する。
従来の装置は、例えば、特許文献1,2,3に示すように搬送室に処理室を接続したシ
ステムにおいて、別々のウェハを別々の処理室で同時に実行したり、又はウェハを順次に
2つ以上の処理室を経由して処理することのできる装置及びその搬送に関するものであっ
た。
特開昭63−133532号公報
特開昭63−252439号公報
特開昭63−129641号公報
ステムにおいて、別々のウェハを別々の処理室で同時に実行したり、又はウェハを順次に
2つ以上の処理室を経由して処理することのできる装置及びその搬送に関するものであっ
た。
上記従来技術は、2つ以上のプロセス処理を施すにつき、ウェハを真空雰囲気の搬送路
を介して2つ以上の処理室に搬送し、個々の処理室では、その処理室が持つ固有の処理を
施すことにより、大気状態にさらすことなく真空中で複数のプロセス処理をする為の装置
構成、搬送方法を考案したものであった。
を介して2つ以上の処理室に搬送し、個々の処理室では、その処理室が持つ固有の処理を
施すことにより、大気状態にさらすことなく真空中で複数のプロセス処理をする為の装置
構成、搬送方法を考案したものであった。
ところで、従来技術では2つ以上の処理室を処理経路として使って運転している運転中
に、どれかの処理室が故障等で使用できなくなった時に正常な処理室を使って処理を続行
する運転については、考慮されていなかった。
に、どれかの処理室が故障等で使用できなくなった時に正常な処理室を使って処理を続行
する運転については、考慮されていなかった。
又、運転開始時修復する必要のある処理室がある場合でも、正常な処理室のみを使って
装置を運転する方法についても考慮されていなかった。
装置を運転する方法についても考慮されていなかった。
又、2つ以上の処理室を処理経路として使って運転中にその運転を一時中断させ、中断
させる迄にその運転の処理経路に使っていなかった処理室を処理経路として使った割り込
み処理を優先的に実行し、その割り込み処理が終了した後は一時中断させていた処理を続
行させる運転する方法についても考慮されていなかった。
させる迄にその運転の処理経路に使っていなかった処理室を処理経路として使った割り込
み処理を優先的に実行し、その割り込み処理が終了した後は一時中断させていた処理を続
行させる運転する方法についても考慮されていなかった。
又、2つ以上の処理室を処理経路として使って運転中にその運転の処理経路に使用して
いない処理室の機器に対する操作指示の方法については考慮されていなかった。またその
運転の処理経路に使用していない処理室の機器に対する操作指示を通常操作する操作部と
離れた場所にある操作部で行う場合での操作上の安全性確保についても考慮されていなか
った。
いない処理室の機器に対する操作指示の方法については考慮されていなかった。またその
運転の処理経路に使用していない処理室の機器に対する操作指示を通常操作する操作部と
離れた場所にある操作部で行う場合での操作上の安全性確保についても考慮されていなか
った。
このように従来技術は処理室が正常な状態にあるときの運転を考慮したものであるが、
処理室が異常等で使用できない時の運転、割り込み処理、運転中での運転の一時中断及び
中断状態から再開運転や、運転中に処理経路に使用していない処理室の操作、運用等につ
いては考慮されていないため、例えば同種の処理室が接続されておれば、他方の正常な処
理室を使って運転を続行するという装置の運転方法が考慮されておらず、稼働率の低い装
置であった。
処理室が異常等で使用できない時の運転、割り込み処理、運転中での運転の一時中断及び
中断状態から再開運転や、運転中に処理経路に使用していない処理室の操作、運用等につ
いては考慮されていないため、例えば同種の処理室が接続されておれば、他方の正常な処
理室を使って運転を続行するという装置の運転方法が考慮されておらず、稼働率の低い装
置であった。
本発明は、プロセス処理を行う2つ以上のプロセス処理装置と、ウェハの搬送を行う搬
送処理装置で構成され、少なくとも2つ以上のプロセス処理装置を使って処理する真空処
理装置において、
1)2つ以上の処理室を処理経路として使って運転中に、処理室の内どれかが故障等で
使用できなくなった場合でも運転続行でき、又、
2)修復する必要のあるプロセス処理装置がある場合は、正常な処理室のみを処理経路
として使って運転でき、又
3)運転中に運転の一時中断、及び中断状態からの再開運転、及び運転中に運転を一時
中断させ、中断させる迄にその運転の処理経路に使っていなかった処理室を処理経路とし
て使った割り込み処理を実行し、その割り込み処理が終了した後は一時中断させていた処
理を続行させる運転ができ、又
4)2つ以上の処理室を処理経路として使って運転中に、その運転の処理経路に使用し
ていない処理室の機器に対する操作指示ができ、またその運転の処理経路に使用していな
い処理室の機器に対して操作指示をする場合や、通常の操作指示をする操作部と離れた場
所にある操作部で行う場合、操作上の安全性確保できるようにすることにより、装置の稼
働率を向上できる真空処理装置を提供することにある。
送処理装置で構成され、少なくとも2つ以上のプロセス処理装置を使って処理する真空処
理装置において、
1)2つ以上の処理室を処理経路として使って運転中に、処理室の内どれかが故障等で
使用できなくなった場合でも運転続行でき、又、
2)修復する必要のあるプロセス処理装置がある場合は、正常な処理室のみを処理経路
として使って運転でき、又
3)運転中に運転の一時中断、及び中断状態からの再開運転、及び運転中に運転を一時
中断させ、中断させる迄にその運転の処理経路に使っていなかった処理室を処理経路とし
て使った割り込み処理を実行し、その割り込み処理が終了した後は一時中断させていた処
理を続行させる運転ができ、又
4)2つ以上の処理室を処理経路として使って運転中に、その運転の処理経路に使用し
ていない処理室の機器に対する操作指示ができ、またその運転の処理経路に使用していな
い処理室の機器に対して操作指示をする場合や、通常の操作指示をする操作部と離れた場
所にある操作部で行う場合、操作上の安全性確保できるようにすることにより、装置の稼
働率を向上できる真空処理装置を提供することにある。
上記目的を達成するために、プロセス処理装置の運転有効/無効であることを示す運転
情報信号を発生する運転情報信号発生手段を各プロセス処理装置毎に設け、その運転情報
信号を記憶する運転情報信号記憶手段を設け、運転情報信号を元にして運転無効である該
プロセス処理装置を使用せず、他の有効なプロセス処理装置を使って運転続行する装置制
御手段を設けたものである。
情報信号を発生する運転情報信号発生手段を各プロセス処理装置毎に設け、その運転情報
信号を記憶する運転情報信号記憶手段を設け、運転情報信号を元にして運転無効である該
プロセス処理装置を使用せず、他の有効なプロセス処理装置を使って運転続行する装置制
御手段を設けたものである。
装置の運転においては、運転途中に或プロセス処理装置が故障等で使用できなくなった
場合は、装置運転を一時中断し、オペレータに運転続行/中止の判断を促し、続行する場
合は、装置運転続行の処置を施すことで運転続行が可能となるようにしたものである。
場合は、装置運転を一時中断し、オペレータに運転続行/中止の判断を促し、続行する場
合は、装置運転続行の処置を施すことで運転続行が可能となるようにしたものである。
又、運転開始時点で修復、保守等する必要のあるプロセス処理装置がある状態で運転を
開始する場合は、運転開始前に修復、保守等する必要のあるプロセス処理装置を使わず、
有効なプロセス処理装置を使って装置運転する処置を施すことで運転が可能となるように
したものである。
開始する場合は、運転開始前に修復、保守等する必要のあるプロセス処理装置を使わず、
有効なプロセス処理装置を使って装置運転する処置を施すことで運転が可能となるように
したものである。
本発明によれば、運転途中に或プロセス処理装置が故障等で使用できなくなった場合や
、運転開始時点で修復や保守の必要のあるプロセス処理装置がある状態で運転を開始する
場合や、運転途中に或プロセス処理装置の運転を中断させ他の有効なプロセス処理装置を
使って運転中に、先に中断させたプロセス処理装置を運転再開する場合に、装置運転続行
の処置を施すことで運転続行が可能となるようにしたことにより、プロセス処理を行う複
数のプロセス処理装置と、ウェハの搬送を行う搬送処理装置で構成された真空処理装置で
は、複数ある処理室の内、どれかが故障等で使用できなくなった場合でも運転続行ができ
、又運転開始時修復や保守する必要のあるプロセス処理装置がある場合でも、正常なプロ
セス処理装置を使って運転でき、装置の稼働率を向上することができる。
、運転開始時点で修復や保守の必要のあるプロセス処理装置がある状態で運転を開始する
場合や、運転途中に或プロセス処理装置の運転を中断させ他の有効なプロセス処理装置を
使って運転中に、先に中断させたプロセス処理装置を運転再開する場合に、装置運転続行
の処置を施すことで運転続行が可能となるようにしたことにより、プロセス処理を行う複
数のプロセス処理装置と、ウェハの搬送を行う搬送処理装置で構成された真空処理装置で
は、複数ある処理室の内、どれかが故障等で使用できなくなった場合でも運転続行ができ
、又運転開始時修復や保守する必要のあるプロセス処理装置がある場合でも、正常なプロ
セス処理装置を使って運転でき、装置の稼働率を向上することができる。
以下、本発明の一実施例を図1〜図10に示す。
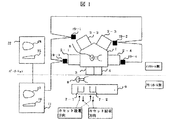
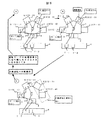
図1は、一実施例であり、プロセス処理装置が搬送処理装置に4室接続され、処理装置
にウエハを搬入する為のカセットは処理装置本体の前に設置した大気搬送装置に設置し、
該カセットから1枚ずつ取り出し処理装置に搬入し処理する装置構成図を示す。プロセス
処理装置が4つ以上接続されても構わない。1はウェハの搬送を行う搬送処理装置であり
ロードロック室のウエハをウエハの搬送スケジュールに従ってプロセス処理装置2−1〜
2−4に搬送し、プロセス処理装置で処理終了したウエハを次のプロセス処理装置に搬送
し、全てのプロセス処理が終了したウエハをアンロードロック室に搬送する。2−1〜2
−4はプロセス処理を行うプロセス処理装置である。プロセス処理としてはエッチング、
後処理、成膜、スパッタ、CVD、水洗処理等ウエハのプロセス処理全てを含む。3はロ
ードロック室であり大気搬送装置6にあるウエハを搬送処理装置に搬入する室、4はアン
ロードロック室であり真空処理室にあるウエハを大気搬送装置6に搬出する室、5は搬送
処理装置内に設置されウェハの搬送を行う真空ロボット、6はウェハを収納したカセット
を設置するための大気搬送装置、7は処理するウェハを収納したカセットであり製品用ウ
エハを収納したカセットやクリーニング用ウエハを収納したカセットである。8は大気搬
送装置上のカセット内のウェハをカセットから搬出し、ロードロック室3に搬入し、また
アンロードロック室4のウエハを元のカセットに戻す大気ロボットを示す。
にウエハを搬入する為のカセットは処理装置本体の前に設置した大気搬送装置に設置し、
該カセットから1枚ずつ取り出し処理装置に搬入し処理する装置構成図を示す。プロセス
処理装置が4つ以上接続されても構わない。1はウェハの搬送を行う搬送処理装置であり
ロードロック室のウエハをウエハの搬送スケジュールに従ってプロセス処理装置2−1〜
2−4に搬送し、プロセス処理装置で処理終了したウエハを次のプロセス処理装置に搬送
し、全てのプロセス処理が終了したウエハをアンロードロック室に搬送する。2−1〜2
−4はプロセス処理を行うプロセス処理装置である。プロセス処理としてはエッチング、
後処理、成膜、スパッタ、CVD、水洗処理等ウエハのプロセス処理全てを含む。3はロ
ードロック室であり大気搬送装置6にあるウエハを搬送処理装置に搬入する室、4はアン
ロードロック室であり真空処理室にあるウエハを大気搬送装置6に搬出する室、5は搬送
処理装置内に設置されウェハの搬送を行う真空ロボット、6はウェハを収納したカセット
を設置するための大気搬送装置、7は処理するウェハを収納したカセットであり製品用ウ
エハを収納したカセットやクリーニング用ウエハを収納したカセットである。8は大気搬
送装置上のカセット内のウェハをカセットから搬出し、ロードロック室3に搬入し、また
アンロードロック室4のウエハを元のカセットに戻す大気ロボットを示す。
通常の運転にあたっては、オペレータは、カセット7−1(又は7ー2)を大気搬送装
置6に設置する。その後表示手段13、入力手段14とを使って運転条件の設定を行った
後運転の開始指示を行うことで、ウェハの搬送が開始しプロセス処理装置2−1(2−2
〜2−4)に搬送され、プロセス処理を行って元のカセットに戻される。元のカセット内
のウェハが全て処理されるとそのカセットの回収の為にこの図に示していないブザーを鳴
らし、オペレータにカセット回収要求を通報し、オペレータがカセットを取り除く。尚、
運転条件設定の1部である処理経路の設定においては、その処理に使用するプロセス処理
装置をウェハの処理する順序にプロセス処理装置の記号等を使って設定する。
置6に設置する。その後表示手段13、入力手段14とを使って運転条件の設定を行った
後運転の開始指示を行うことで、ウェハの搬送が開始しプロセス処理装置2−1(2−2
〜2−4)に搬送され、プロセス処理を行って元のカセットに戻される。元のカセット内
のウェハが全て処理されるとそのカセットの回収の為にこの図に示していないブザーを鳴
らし、オペレータにカセット回収要求を通報し、オペレータがカセットを取り除く。尚、
運転条件設定の1部である処理経路の設定においては、その処理に使用するプロセス処理
装置をウェハの処理する順序にプロセス処理装置の記号等を使って設定する。
このウエハの処理順序は、運転モードとして表1に示す。

以下のこの運転モードの説明ではプロセス処理装置2ー2と2ー3は同一のプロセス処
理を(この実施例ではエッチング処理とする)、プロセス処理装置2ー1と2ー4は同一
のプロセス処理を(この実施例では後処理とする)するものとして説明する。またプロセ
ス処理の実施例としては、プロセス処理装置2ー2または2ー3を使ったエッチング処理
を行った後、プロセス処理装置2ー1と2ー4を使った後処理を行うものとする。またウ
エハの処理条件によってはエッチング処理のみであっても良い。
理を(この実施例ではエッチング処理とする)、プロセス処理装置2ー1と2ー4は同一
のプロセス処理を(この実施例では後処理とする)するものとして説明する。またプロセ
ス処理の実施例としては、プロセス処理装置2ー2または2ー3を使ったエッチング処理
を行った後、プロセス処理装置2ー1と2ー4を使った後処理を行うものとする。またウ
エハの処理条件によってはエッチング処理のみであっても良い。
1)1カセット1レシピ並列運転
同一のプロセス処理条件(以下では、プロセス処理条件をレシピと称する)で処理する
ウエハが収納されたカセット内の最下段もしくは最上段のウエハから順番にカセットから
抜き出し搬送処理装置に搬入しプロセス処理をするものである。ウエハは、プロセス処理
装置2ー2でエッチング処理した後プロセス処理装置2ー1で後処理をして元のカセット
に戻す経路(この経路Aという)と、プロセス処理装置2ー3でエッチング処理した後プ
ロセス処理装置2ー4で後処理をして元のカセットに戻す経路(この経路Bという)の両
方を使って処理する。
同一のプロセス処理条件(以下では、プロセス処理条件をレシピと称する)で処理する
ウエハが収納されたカセット内の最下段もしくは最上段のウエハから順番にカセットから
抜き出し搬送処理装置に搬入しプロセス処理をするものである。ウエハは、プロセス処理
装置2ー2でエッチング処理した後プロセス処理装置2ー1で後処理をして元のカセット
に戻す経路(この経路Aという)と、プロセス処理装置2ー3でエッチング処理した後プ
ロセス処理装置2ー4で後処理をして元のカセットに戻す経路(この経路Bという)の両
方を使って処理する。
この実施例での処理順序は
経路A:カセットC1→プロセス処理装置2ー2→プロセス処理装置2ー1→カ
セットC1
経路B:カセットC1→プロセス処理装置2ー3→プロセス処理装置2ー4→カ
セットC1
の組み合わせとしたが、
経路C:カセットC1→プロセス処理装置2ー2→プロセス処理装置2ー4→カ
セットC1
経路D:カセットC1→プロセス処理装置2ー3→プロセス処理装置2ー1→カ
セットC1
の組み合わせであっても良い。
経路A:カセットC1→プロセス処理装置2ー2→プロセス処理装置2ー1→カ
セットC1
経路B:カセットC1→プロセス処理装置2ー3→プロセス処理装置2ー4→カ
セットC1
の組み合わせとしたが、
経路C:カセットC1→プロセス処理装置2ー2→プロセス処理装置2ー4→カ
セットC1
経路D:カセットC1→プロセス処理装置2ー3→プロセス処理装置2ー1→カ
セットC1
の組み合わせであっても良い。
ウエハの処理は、1枚目のウエハは経路A、2枚目は経路B、3枚目のウエハは経路A
、4枚目は経路B、・・・という順序でカセット内の最終ウエハ迄処理を行う。C1カセ
ット内の全てを処理終了するとC1カセットの処理終了とカセット交換をオペレータに通
報する為にこの図に示していないブザーを鳴らす。この時迄にC2カセットが設置されて
あれば、C1カセットの処理終了に引き続きC2カセットの処理に移る。C2カセットに
ついてもC1カセットの場合と同じ順序で処理を行い、C2カセット内の全てを処理終了
するとC2カセットの処理終了とカセット交換をオペレータに通報する為にこの図に示し
ていないブザーを鳴らす。この時迄にC1カセットが設置されてあれば、C2カセットの
処理終了に引き続きC1カセットの処理に移る。以降この運転サイクル繰り返しを行う。
、4枚目は経路B、・・・という順序でカセット内の最終ウエハ迄処理を行う。C1カセ
ット内の全てを処理終了するとC1カセットの処理終了とカセット交換をオペレータに通
報する為にこの図に示していないブザーを鳴らす。この時迄にC2カセットが設置されて
あれば、C1カセットの処理終了に引き続きC2カセットの処理に移る。C2カセットに
ついてもC1カセットの場合と同じ順序で処理を行い、C2カセット内の全てを処理終了
するとC2カセットの処理終了とカセット交換をオペレータに通報する為にこの図に示し
ていないブザーを鳴らす。この時迄にC1カセットが設置されてあれば、C2カセットの
処理終了に引き続きC1カセットの処理に移る。以降この運転サイクル繰り返しを行う。
この運転を終了する場合は、主制御部11から運転終了の操作入力を行うことで運転が終
了する。
了する。
処理を終了する方法として、以下の5モードがある。
ア)ウエハ供給停止:処理中のカセットからのウエハ取り出しを中止する。
(2カセットを1ロットとして運転している場合は、指定した方のカセットか
らのウエハ取り出しを中止する。)
イ)カセット供給停止:現在処理中のカセット内のウエハを全て処理終了した後、
その処理終了迄に設置されてあったカセットの処理を中止する。
(2カセットを1ロットとして運転している場合は、指定した方のカセット内の
ウエハを全て処理終了した後、その時迄に設置されてあったカセットの処理を中
止する。)
ウ)サイクル停止:現在実行中のプロセス処理、排気、リーク、搬送等の動作終了
後その場で停止する。
エ)処理室一時停止:指定処理室について、現在処理中のプロセス処理終了後停止
する。この場合は、運転の再開操作により一時停止した状態から運転を再開す
ることができる。またその処理室のみ手動操作は可能である。
(2カセットを1ロットとして運転している場合は、指定した方のカセットか
らのウエハ取り出しを中止する。)
イ)カセット供給停止:現在処理中のカセット内のウエハを全て処理終了した後、
その処理終了迄に設置されてあったカセットの処理を中止する。
(2カセットを1ロットとして運転している場合は、指定した方のカセット内の
ウエハを全て処理終了した後、その時迄に設置されてあったカセットの処理を中
止する。)
ウ)サイクル停止:現在実行中のプロセス処理、排気、リーク、搬送等の動作終了
後その場で停止する。
エ)処理室一時停止:指定処理室について、現在処理中のプロセス処理終了後停止
する。この場合は、運転の再開操作により一時停止した状態から運転を再開す
ることができる。またその処理室のみ手動操作は可能である。
オ)即停止:実行中の全ての動作を即時停止する。
処理終了に当たってはいずれの方法によっても良い。
2)2カセット1レシピ並列運転
同一のプロセス処理条件(レシピ)で処理するウエハが収納されたカセット内の最下段
もしくは最上段のウエハから順番にカセットから抜き出し搬送処理装置に搬入しプロセス
処理をするものである。
同一のプロセス処理条件(レシピ)で処理するウエハが収納されたカセット内の最下段
もしくは最上段のウエハから順番にカセットから抜き出し搬送処理装置に搬入しプロセス
処理をするものである。
この場合のカセットから抜き出し搬送処理装置に搬入しプロセス処理をする運転が前記
の「1カセット1レシピ並列運転」の場合と異なる。
前記の「1カセット1レシピ並列運転」の場合は、同一カセットから順次ウエハを抜き
出し搬送処理装置に搬入しプロセス処理を実施し、そのカセットのウエハを全て終了した
後次のカセットのウエハの処理に移ったが、本「2カセット1レシピ並列運転」では、カ
セットC1とカセットC2から交互にウエハを抜き出し搬送処理装置に搬入しプロセス処
理を実施する。ウエハの処理経路は前記の「1カセット1レシピ並列運転」の場合と同様
に、プロセス処理装置2ー2でエッチング処理した後プロセス処理装置2ー1で後処理を
して元のカセットに戻す経路(この経路Aという)と、プロセス処理装置2ー3でエッチ
ング処理した後プロセス処理装置2ー4で後処理をして元のカセットに戻す経路(この経
路Bという)の両方を使って処理する。
の「1カセット1レシピ並列運転」の場合と異なる。
前記の「1カセット1レシピ並列運転」の場合は、同一カセットから順次ウエハを抜き
出し搬送処理装置に搬入しプロセス処理を実施し、そのカセットのウエハを全て終了した
後次のカセットのウエハの処理に移ったが、本「2カセット1レシピ並列運転」では、カ
セットC1とカセットC2から交互にウエハを抜き出し搬送処理装置に搬入しプロセス処
理を実施する。ウエハの処理経路は前記の「1カセット1レシピ並列運転」の場合と同様
に、プロセス処理装置2ー2でエッチング処理した後プロセス処理装置2ー1で後処理を
して元のカセットに戻す経路(この経路Aという)と、プロセス処理装置2ー3でエッチ
ング処理した後プロセス処理装置2ー4で後処理をして元のカセットに戻す経路(この経
路Bという)の両方を使って処理する。
この実施例での処理順序の経路A、Bもしくは経路C、Dについては前記前記「1カセ
ット1レシピ並列運転」の場合と同じである。
ット1レシピ並列運転」の場合と同じである。
ウエハの処理は、1枚目のウエハはC1カセットからの1枚目を経路A、2枚目はC2
カセットからの1枚目を経路B、3枚目のウエハはC1カセットからの2枚目を経路A、
4枚目はC2カセットからの2枚目を経路B、・・・という順序でカセット内の最終ウエ
ハ迄処理を行う。C1もしくはC2カセット内の全てを処理終了するとC1(またはC2
)カセットの処理終了とカセット交換をオペレータに通報する為にこの図に示していない
ブザーを鳴らす。この終了したカセットが取り除かれ新しいカセットが設置されるまでは
、他方のカセット側の処理のみ継続されている。新しいカセットが設置されると前記のよ
うにC1とC2カセットから交互ににウエハを抜き出し搬送処理装置に搬入しプロセス処
理を実施する。以降この運転サイクル繰り返しを行う。この運転を終了する場合は、主制
御部11から運転終了の操作入力を行う事で運転が終了する。終了方法は前記「1カセッ
ト1レシピ並列運転」の場合と同じである。
カセットからの1枚目を経路B、3枚目のウエハはC1カセットからの2枚目を経路A、
4枚目はC2カセットからの2枚目を経路B、・・・という順序でカセット内の最終ウエ
ハ迄処理を行う。C1もしくはC2カセット内の全てを処理終了するとC1(またはC2
)カセットの処理終了とカセット交換をオペレータに通報する為にこの図に示していない
ブザーを鳴らす。この終了したカセットが取り除かれ新しいカセットが設置されるまでは
、他方のカセット側の処理のみ継続されている。新しいカセットが設置されると前記のよ
うにC1とC2カセットから交互ににウエハを抜き出し搬送処理装置に搬入しプロセス処
理を実施する。以降この運転サイクル繰り返しを行う。この運転を終了する場合は、主制
御部11から運転終了の操作入力を行う事で運転が終了する。終了方法は前記「1カセッ
ト1レシピ並列運転」の場合と同じである。
3)2カセット2レシピ並列運転
この運転では、C1カセットとC2カセットとのウエハ処理レシピが異なる事以外は前
記「2カセット1レシピ並列運転」と同じある。
この運転では、C1カセットとC2カセットとのウエハ処理レシピが異なる事以外は前
記「2カセット1レシピ並列運転」と同じある。
4)1カセット1レシピ直列運転
この運転では、同一のプロセス処理条件(レシピ)で処理するウエハが収納されたカセ
ット内の最下段もしくは最上段のウエハから順番にカセットから抜き出し搬送処理装置に
搬入しプロセス処理をすることは前記「1カセット1レシピ並列運転」の場合と同じであ
る。ところがウエハの処理経路は前記「1カセット1レシピ並列運転」の場合と異なる。
この運転では、同一のプロセス処理条件(レシピ)で処理するウエハが収納されたカセ
ット内の最下段もしくは最上段のウエハから順番にカセットから抜き出し搬送処理装置に
搬入しプロセス処理をすることは前記「1カセット1レシピ並列運転」の場合と同じであ
る。ところがウエハの処理経路は前記「1カセット1レシピ並列運転」の場合と異なる。
本「1カセット1レシピ直列運転」では、ウエハはプロセス処理装置2ー2(もしくはプ
ロセス処理装置2ー3)でエッチング処理した後、更にプロセス処理装置2ー3(もしく
はプロセス処理装置2ー2)でエッチング処理した後、プロセス処理装置2ー1(もしく
はプロセス処理装置2ー4)で後処理をして元のカセットに戻す経路(この経路Eという
)で処理する。
ロセス処理装置2ー3)でエッチング処理した後、更にプロセス処理装置2ー3(もしく
はプロセス処理装置2ー2)でエッチング処理した後、プロセス処理装置2ー1(もしく
はプロセス処理装置2ー4)で後処理をして元のカセットに戻す経路(この経路Eという
)で処理する。
ウエハの処理は、1枚目のウエハは経路E、2枚目は経路E、3枚目のウエハは経路E
、4枚目は経路E、・・・という順序でカセット内の最終ウエハ迄処理を行う。C1カセ
ット内の全てを処理終了するとC1カセットの処理終了とカセット交換をオペレータに通
報する為にこの図に示していないブザーを鳴らす。この時迄にC2カセットが設置されて
あれば、C1カセットの処理終了に引き続きC2カセットの処理に移る。C2カセットに
ついてもC1カセットの場合と同じ順序で処理を行い、C2カセット内の全てを処理終了
するとC2カセットの処理終了とカセット交換をオペレータに通報する為にこの図に示し
ていないブザーを鳴らす。この時迄にC1カセットが設置されてあれば、C2カセットの
処理終了に引き続きC1カセットの処理に移る。以降この運転サイクル繰り返しを行う。
、4枚目は経路E、・・・という順序でカセット内の最終ウエハ迄処理を行う。C1カセ
ット内の全てを処理終了するとC1カセットの処理終了とカセット交換をオペレータに通
報する為にこの図に示していないブザーを鳴らす。この時迄にC2カセットが設置されて
あれば、C1カセットの処理終了に引き続きC2カセットの処理に移る。C2カセットに
ついてもC1カセットの場合と同じ順序で処理を行い、C2カセット内の全てを処理終了
するとC2カセットの処理終了とカセット交換をオペレータに通報する為にこの図に示し
ていないブザーを鳴らす。この時迄にC1カセットが設置されてあれば、C2カセットの
処理終了に引き続きC1カセットの処理に移る。以降この運転サイクル繰り返しを行う。
この運転を終了する場合は、主制御部11から運転終了の操作入力を行う事で運転が終了
する。終了方法は前記「1カセット1レシピ並列運転」の場合と同じである。
する。終了方法は前記「1カセット1レシピ並列運転」の場合と同じである。
また、装置を保守、メンテナンスする場合は補助操作盤22内にある表示手段26、入
力手段25とを使って装置の機側で操作することができる。この補助操作盤22は可搬型
の操作端末(例えばノートパソコン)であり装置の近くまで持ち運び、装置状態を目視し
ながら表示手段26に表示される装置情報(例えば入出力ビットのON/OFF情報、エ
ラー情報等)を保守、メンテナンスの操作に活用でき、保守、メンテナンスの操作性を向
上させているものである。この補助操作盤22では、主制御部11と同じ機能を有してい
るが、オペレータに対する安全性を確保する為に主制御部11と補助操作盤22とで同時
に操作する場合は、片方しか操作入力できないように誤操作防止機能を設けてある。
力手段25とを使って装置の機側で操作することができる。この補助操作盤22は可搬型
の操作端末(例えばノートパソコン)であり装置の近くまで持ち運び、装置状態を目視し
ながら表示手段26に表示される装置情報(例えば入出力ビットのON/OFF情報、エ
ラー情報等)を保守、メンテナンスの操作に活用でき、保守、メンテナンスの操作性を向
上させているものである。この補助操作盤22では、主制御部11と同じ機能を有してい
るが、オペレータに対する安全性を確保する為に主制御部11と補助操作盤22とで同時
に操作する場合は、片方しか操作入力できないように誤操作防止機能を設けてある。
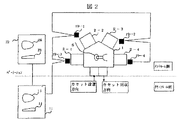
図2は、別の一実施例あり、プロセス処理装置が搬送処理装置に4室接続され、処理装
置にウエハを搬入する為のカセットは処理装置本体内のロードロック室に設置し、カセッ
トから1枚ずつ取り出し処理装置に搬入し処理する装置構成図を示す。プロセス処理装置
がこれ以上接続されても構わない。装置構成としては図1に示す構成からウェハを収納し
たカセットを設置するための大気搬送装置6、大気ロボット8を削除したものである。ウ
エハのカセットからの搬出がロードロック室3からとなり、カセットへの収納がアンロー
ドロック室4となる以外の各機器の機能及び構成は図1と同じである。また運転モードに
おいては、
1)1カセット1レシピ並列運転
同一のプロセス処理条件(レシピ)で処理するウエハが収納されたカセット内の最下
段もしくは最上段のウエハから順番にカセットから抜き出しプロセス処理装置に搬入しプ
ロセス処理をするものである。ウエハは、プロセス処理装置2ー2でエッチング処理した
後プロセス処理装置2ー1で後処理をして元のカセットに戻す経路(この経路Aという)
と、プロセス処理装置2ー3でエッチング処理した後プロセス処理装置2ー4で後処理を
して元のカセットに戻す経路(この経路Bという)の両方を使って処理する。
置にウエハを搬入する為のカセットは処理装置本体内のロードロック室に設置し、カセッ
トから1枚ずつ取り出し処理装置に搬入し処理する装置構成図を示す。プロセス処理装置
がこれ以上接続されても構わない。装置構成としては図1に示す構成からウェハを収納し
たカセットを設置するための大気搬送装置6、大気ロボット8を削除したものである。ウ
エハのカセットからの搬出がロードロック室3からとなり、カセットへの収納がアンロー
ドロック室4となる以外の各機器の機能及び構成は図1と同じである。また運転モードに
おいては、
1)1カセット1レシピ並列運転
同一のプロセス処理条件(レシピ)で処理するウエハが収納されたカセット内の最下
段もしくは最上段のウエハから順番にカセットから抜き出しプロセス処理装置に搬入しプ
ロセス処理をするものである。ウエハは、プロセス処理装置2ー2でエッチング処理した
後プロセス処理装置2ー1で後処理をして元のカセットに戻す経路(この経路Aという)
と、プロセス処理装置2ー3でエッチング処理した後プロセス処理装置2ー4で後処理を
して元のカセットに戻す経路(この経路Bという)の両方を使って処理する。
この実施例での処理順序は
経路A:ロードロック室内カセット→プロセス処理装置2ー2→プロセス処理装置
2ー1→アンロードロック室内カセット
経路B:ロードロック室内カセット→ プロセス処理装置2ー3→プロセス処理装
置2ー4→アンロードロック室内カセット
又は、
経路C:ロードロック室内カセット→プロセス処理装置2ー2→プロセス処理装置
2ー4→アンロードロック室内カセット
経路D:ロードロック室内カセット→プロセス処理装置2ー3→プロセス処理装置
2ー1→アンロードロック室内カセット
の組み合わせであっても良い。また上記処理順序では処理したウエハはアンロードロック
室内カセットに戻したがウエハを取り出したロードロック室内カセットに戻すこともでき
る。
経路A:ロードロック室内カセット→プロセス処理装置2ー2→プロセス処理装置
2ー1→アンロードロック室内カセット
経路B:ロードロック室内カセット→ プロセス処理装置2ー3→プロセス処理装
置2ー4→アンロードロック室内カセット
又は、
経路C:ロードロック室内カセット→プロセス処理装置2ー2→プロセス処理装置
2ー4→アンロードロック室内カセット
経路D:ロードロック室内カセット→プロセス処理装置2ー3→プロセス処理装置
2ー1→アンロードロック室内カセット
の組み合わせであっても良い。また上記処理順序では処理したウエハはアンロードロック
室内カセットに戻したがウエハを取り出したロードロック室内カセットに戻すこともでき
る。
本実施例では経路Aと経路Bを並行してロードロック室内のカセットから抜き出したウ
エハはアンロードロック室内のカセットに戻す処理の例を示す。ウエハの処理は、1枚目
のウエハは経路A、2枚目は経路B、3枚目のウエハは経路A、4枚目は経路B、・・・
という順序でカセット内の最終ウエハ迄処理を行う。
エハはアンロードロック室内のカセットに戻す処理の例を示す。ウエハの処理は、1枚目
のウエハは経路A、2枚目は経路B、3枚目のウエハは経路A、4枚目は経路B、・・・
という順序でカセット内の最終ウエハ迄処理を行う。
ロードロック室内カセット内の全てを処理終了するとロードロック室内カセットとアン
ロードロック室内カセットの処理終了とカセット交換をオペレータに通報する為にこの図
に示していないブザーを鳴らす。次に新たな未処理ウエハの入ったカセットをロードロッ
ク室に、空のカセットをアンロードロック室設置して、以降この運転サイクル繰り返しを
行う。この運転を終了する場合は、主制御部11から運転終了の操作入力を行う事で運転
が終了する。終了方法は前記「1カセット1レシピ並列運転」の場合と同じである。
ロードロック室内カセットの処理終了とカセット交換をオペレータに通報する為にこの図
に示していないブザーを鳴らす。次に新たな未処理ウエハの入ったカセットをロードロッ
ク室に、空のカセットをアンロードロック室設置して、以降この運転サイクル繰り返しを
行う。この運転を終了する場合は、主制御部11から運転終了の操作入力を行う事で運転
が終了する。終了方法は前記「1カセット1レシピ並列運転」の場合と同じである。
2)2カセット1レシピ並列運転
同一のプロセス処理条件(以下では、プロセス処理条件をレシピと称する)で処理する
ウエハが収納されたカセット内の最下段もしくは最上段のウエハから順番にカセットから
抜き出しプロセス処理装置に搬入しプロセス処理をするものである。
同一のプロセス処理条件(以下では、プロセス処理条件をレシピと称する)で処理する
ウエハが収納されたカセット内の最下段もしくは最上段のウエハから順番にカセットから
抜き出しプロセス処理装置に搬入しプロセス処理をするものである。
前記の「1カセット1レシピ並列運転」の場合は、同一カセットから順次ウエハを抜き
出しプロセス処理装置に搬入しプロセス処理を実施し、そのカセットのウエハを全て終了
した後次のカセットのウエハの処理に移ったが、本「2カセット1レシピ並列運転」では
、ロードロック室内のカセットとアンロードロック室内のカセットから交互にウエハを抜
き出しプロセス処理装置に搬入しプロセス処理を実施する。ウエハの処理経路は前記の「
1カセット1レシピ並列運転」の場合と同様に、プロセス処理装置2ー2でエッチング処
理した後プロセス処理装置2ー1で後処理をして元のカセットに戻す経路(この経路Aと
いう)と、プロセス処理装置2ー3でエッチング処理した後、プロセス処理装置2ー4で
後処理をして元のカセットに戻す経路(この経路Bという)の両方を使って処理する。
出しプロセス処理装置に搬入しプロセス処理を実施し、そのカセットのウエハを全て終了
した後次のカセットのウエハの処理に移ったが、本「2カセット1レシピ並列運転」では
、ロードロック室内のカセットとアンロードロック室内のカセットから交互にウエハを抜
き出しプロセス処理装置に搬入しプロセス処理を実施する。ウエハの処理経路は前記の「
1カセット1レシピ並列運転」の場合と同様に、プロセス処理装置2ー2でエッチング処
理した後プロセス処理装置2ー1で後処理をして元のカセットに戻す経路(この経路Aと
いう)と、プロセス処理装置2ー3でエッチング処理した後、プロセス処理装置2ー4で
後処理をして元のカセットに戻す経路(この経路Bという)の両方を使って処理する。
この実施例での処理順序の経路A、Bもしくは経路C、Dについては前記前記「1カセ
ット1レシピ並列運転」の場合と同じである。
ット1レシピ並列運転」の場合と同じである。
ウエハの処理は、1枚目のウエハはロードロック室内のカセットからの1枚目を経路A
、2枚目はアンロードロック室内のカセットからの1枚目を経路B、3枚目のウエハはロ
ードロック室内のカセットからの2枚目を経路A、4枚目はアンロードロック室内のカセ
ットからの2枚目を経路B、・・・という順序でカセット内の最終ウエハ迄処理を行う。
、2枚目はアンロードロック室内のカセットからの1枚目を経路B、3枚目のウエハはロ
ードロック室内のカセットからの2枚目を経路A、4枚目はアンロードロック室内のカセ
ットからの2枚目を経路B、・・・という順序でカセット内の最終ウエハ迄処理を行う。
ロードロック室内もしくはアンロードロック室カセット内の全てのウエハを処理終了する
とロードロック室内(またはアンロードロック室内)カセットの処理終了とカセット交換
をオペレータに通報する為にこの図に示していないブザーを鳴らす。この終了したカセッ
トが取り除かれ新しいカセットが設置されるまでは、他方のカセット側の処理のみ継続さ
れている。新しいカセットが設置されると前記のようにロードロック室内とアンロードロ
ック室内カセットから交互ににウエハを抜き出しプロセス処理装置に搬入しプロセス処理
を実施する。以降この運転サイクル繰り返しを行う。この運転を終了する場合は、主制御
部11から運転終了の操作入力を行う事で運転が終了する。終了方法は前記「1カセット
1レシピ並列運転」の場合と同じである。
とロードロック室内(またはアンロードロック室内)カセットの処理終了とカセット交換
をオペレータに通報する為にこの図に示していないブザーを鳴らす。この終了したカセッ
トが取り除かれ新しいカセットが設置されるまでは、他方のカセット側の処理のみ継続さ
れている。新しいカセットが設置されると前記のようにロードロック室内とアンロードロ
ック室内カセットから交互ににウエハを抜き出しプロセス処理装置に搬入しプロセス処理
を実施する。以降この運転サイクル繰り返しを行う。この運転を終了する場合は、主制御
部11から運転終了の操作入力を行う事で運転が終了する。終了方法は前記「1カセット
1レシピ並列運転」の場合と同じである。
3)2カセット2レシピ並列運転
この運転では、ロードロック室内のカセットとアンロードロック室内のカセットとのウ
エハ処理レシピが異なる事以外は前記「2カセット1レシピ並列運転」と同じある。
この運転では、ロードロック室内のカセットとアンロードロック室内のカセットとのウ
エハ処理レシピが異なる事以外は前記「2カセット1レシピ並列運転」と同じある。
4)1カセット1レシピ直列運転
この運転では、同一のプロセス処理条件(以下では、プロセス処理条件をレシピと称す
る)で処理するウエハが収納されたカセット内の最下段もしくは最上段のウエハから順番
にカセットから抜き出しプロセス処理装置に搬入しプロセス処理をすることは前記「1カ
セット1レシピ並列運転」の場合と同じである。ところがウエハの処理経路は前記「1カ
セット1レシピ並列運転」の場合と異なる。本「1カセット1レシピ直列運転」では、ウ
エハはプロセス処理装置2ー2(もしくはプロセス処理装置2ー3)でエッチング処理し
た後、更にプロセス処理装置2ー3(もしくはプロセス処理装置2ー2)でエッチング処
理した後、プロセス処理装置2ー1(もしくはプロセス処理装置2ー4)で後処理をして
元のカセットに戻す経路(この経路Eという)で処理する。
この運転では、同一のプロセス処理条件(以下では、プロセス処理条件をレシピと称す
る)で処理するウエハが収納されたカセット内の最下段もしくは最上段のウエハから順番
にカセットから抜き出しプロセス処理装置に搬入しプロセス処理をすることは前記「1カ
セット1レシピ並列運転」の場合と同じである。ところがウエハの処理経路は前記「1カ
セット1レシピ並列運転」の場合と異なる。本「1カセット1レシピ直列運転」では、ウ
エハはプロセス処理装置2ー2(もしくはプロセス処理装置2ー3)でエッチング処理し
た後、更にプロセス処理装置2ー3(もしくはプロセス処理装置2ー2)でエッチング処
理した後、プロセス処理装置2ー1(もしくはプロセス処理装置2ー4)で後処理をして
元のカセットに戻す経路(この経路Eという)で処理する。
本実施例では経路Eでロードロック室内のカセットから抜き出したウエハはアンロード
ロック室内のカセットに戻す処理の例を示す。ウエハの処理は、1枚目のウエハは経路E
、2枚目は経路E、3枚目のウエハは経路E、4枚目は経路E、・・・という順序でカセ
ット内の最終ウエハ迄処理を行う。カセット内の全てを処理終了するとロードロック室内
カセットとアンロードロック室内カセットの処理終了と交換をオペレータに通報する為に
この図に示していないブザーを鳴らす。
ロック室内のカセットに戻す処理の例を示す。ウエハの処理は、1枚目のウエハは経路E
、2枚目は経路E、3枚目のウエハは経路E、4枚目は経路E、・・・という順序でカセ
ット内の最終ウエハ迄処理を行う。カセット内の全てを処理終了するとロードロック室内
カセットとアンロードロック室内カセットの処理終了と交換をオペレータに通報する為に
この図に示していないブザーを鳴らす。
次に新たな未処理ウエハの入ったカセットをロードロック室に、空のカセットをアンロ
ードロック室に設置して、以降この運転サイクル繰り返しを行う。この運転を終了する場
合は、主制御部11から運転終了の操作入力を行う事で運転が終了する。終了方法は前記
「1カセット1レシピ並列運転」の場合と同じである。
ードロック室に設置して、以降この運転サイクル繰り返しを行う。この運転を終了する場
合は、主制御部11から運転終了の操作入力を行う事で運転が終了する。終了方法は前記
「1カセット1レシピ並列運転」の場合と同じである。
図3は、制御構成図を示す。本実施例では、装置全体の主制御部は、搬送処理装置に搭
載している場合を示す。尚、装置全体の主制御部は、搬送処理装置以外にあっても構わな
い。また表示手段13、入力手段14は主制御部とは別の制御ユニットとして構成しても
良い。11は、装置全体を制御する主制御部の構成を示す。制御手段としては、本発明の
請求範囲に該当する部分のみを抜き出して記述しており、装置を動かす上での必要な入出
力制御部分(DI/O、AI/O)については、記述していない。16は、処理装置内で
のウェハの処理順序を記憶する処理順序情報記憶手段であり、例えばRAM(Rando
m Access Memory)である。このウェハの処理順序は、運転開始前に表示
手段13、入力手段14とを使ってオペレータによって入力されたデータが記憶される。
載している場合を示す。尚、装置全体の主制御部は、搬送処理装置以外にあっても構わな
い。また表示手段13、入力手段14は主制御部とは別の制御ユニットとして構成しても
良い。11は、装置全体を制御する主制御部の構成を示す。制御手段としては、本発明の
請求範囲に該当する部分のみを抜き出して記述しており、装置を動かす上での必要な入出
力制御部分(DI/O、AI/O)については、記述していない。16は、処理装置内で
のウェハの処理順序を記憶する処理順序情報記憶手段であり、例えばRAM(Rando
m Access Memory)である。このウェハの処理順序は、運転開始前に表示
手段13、入力手段14とを使ってオペレータによって入力されたデータが記憶される。
17は、プロセス処理装置18−1〜18−4の運転有効/無効であることを示す運転情
報信号を記憶する運転情報信号記憶手段であり、例えばRAMである。13は、運転状態
、運転条件の設定内容、運転の開始指示/終了の表示を行う表示手段であり、例えばCR
Tである。14は、運転条件の設定、運転の開始指示入力、プロセス処理条件、保守やメ
ンテナンスの操作入力等を行う入力手段であり、例えばキーボードである。15は、上記
プロセス処理装置18−1〜18−4の運転有効/無効であることを示す運転情報信号状
態を判断し、自動運転中にプロセス処理装置18−1〜18−4のどれかが運転不可とな
っても該プロセス処理装置を使用せず、他のプロセス処理装置を使って運転続行する処理
手順を記憶した装置制御手段であり、例えばROM(Read Only Memory
)である。12は、上記13〜17を制御する中央制御手段であり、例えば、CPU(C
entral Processor Unit)である。18−1〜18−4は、ウェハ
のプロセス処理を行うプロセス処理装置である。この処理装置としては、エッチング、後
処理、成膜、スパッタ、CVD、水処理等ウエハのプロセス処理を行う処理であれば、何
であっても良い。19−1〜19−4は、プロセス処理装置18−1〜18−4の運転有
効/無効であることを示す運転情報信号を発生する運転情報信号発生手段である。本実施
例では、プロセス処理装置に設けているが、どこにあっても良い。この運転情報信号を発
生する手段として、
1)プロセス処理装置の装置電源の遮断信号を用いる
2)プロセス処理装置の使用の有効/無効を設定する運転切り替え信号(例えば、切り
替えスイッチ)を用いる
3)プロセス処理装置の使用の有効/無効を示す運転制御信号として、オペレータが設
定入力した入力情報を用いる
ことができる。
報信号を記憶する運転情報信号記憶手段であり、例えばRAMである。13は、運転状態
、運転条件の設定内容、運転の開始指示/終了の表示を行う表示手段であり、例えばCR
Tである。14は、運転条件の設定、運転の開始指示入力、プロセス処理条件、保守やメ
ンテナンスの操作入力等を行う入力手段であり、例えばキーボードである。15は、上記
プロセス処理装置18−1〜18−4の運転有効/無効であることを示す運転情報信号状
態を判断し、自動運転中にプロセス処理装置18−1〜18−4のどれかが運転不可とな
っても該プロセス処理装置を使用せず、他のプロセス処理装置を使って運転続行する処理
手順を記憶した装置制御手段であり、例えばROM(Read Only Memory
)である。12は、上記13〜17を制御する中央制御手段であり、例えば、CPU(C
entral Processor Unit)である。18−1〜18−4は、ウェハ
のプロセス処理を行うプロセス処理装置である。この処理装置としては、エッチング、後
処理、成膜、スパッタ、CVD、水処理等ウエハのプロセス処理を行う処理であれば、何
であっても良い。19−1〜19−4は、プロセス処理装置18−1〜18−4の運転有
効/無効であることを示す運転情報信号を発生する運転情報信号発生手段である。本実施
例では、プロセス処理装置に設けているが、どこにあっても良い。この運転情報信号を発
生する手段として、
1)プロセス処理装置の装置電源の遮断信号を用いる
2)プロセス処理装置の使用の有効/無効を設定する運転切り替え信号(例えば、切り
替えスイッチ)を用いる
3)プロセス処理装置の使用の有効/無効を示す運転制御信号として、オペレータが設
定入力した入力情報を用いる
ことができる。
20と21は、装置全体を制御する主制御部11と補助操作盤22とを接続する通信手
段である。補助操作盤22、25、26は上述した用途に使用するものである。24は補
助操作盤での端末機能を制御する処理手順を記憶した端末制御手段である。23は上記2
1、24から26を制御する中央制御手段であり、例えば、CPU(Central P
rocessor Unit)である。
段である。補助操作盤22、25、26は上述した用途に使用するものである。24は補
助操作盤での端末機能を制御する処理手順を記憶した端末制御手段である。23は上記2
1、24から26を制御する中央制御手段であり、例えば、CPU(Central P
rocessor Unit)である。
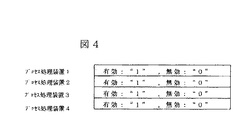
図4は、運転情報信号図である。各プロセス処理装置毎に運転の有効/無効を示す情報
が記憶される。この場合では、有効な場合は、1を、無効な場合は、0を示すが区別でき
る内容であれば、記号や数字であっても良い。この情報は、運転情報信号発生手段19−
1〜19−4の信号状態が反映されたものであり、運転情報信号記憶手段17に記憶され
る。
が記憶される。この場合では、有効な場合は、1を、無効な場合は、0を示すが区別でき
る内容であれば、記号や数字であっても良い。この情報は、運転情報信号発生手段19−
1〜19−4の信号状態が反映されたものであり、運転情報信号記憶手段17に記憶され
る。
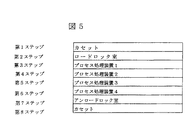
図5は、処理順序情報図である。運転条件設定の一つとして、オペレータが運転開始前
に表示手段13、入力手段14とを使ってウェハの処理する順序を設定した情報である。
に表示手段13、入力手段14とを使ってウェハの処理する順序を設定した情報である。
この情報は処理順序情報記憶手段に記憶される。
図6は、装置運転フロー図を示す。オペレータは運転開始前に処理装置として構成され
ているプロセス処理装置の内、故障等で運転に使用できない、又は保守(プラズマクリー
ニングも含む)の為使用しないプロセス処理装置があるか否かを判断する(30)。使用
できない(又は、使用しない)プロセス処理装置があれば、運転情報信号発生手段19を
用いて図4に記述した状態になるように設定する(32)。この設定の方法の一つとして
、
1)プロセス処理装置の装置電源の遮断信号を用いる場合は、該プロセス処理装置の装
置電源供給用電磁開閉器をOFFする。これにより、遮断信号が発生し、運転情報信号記
憶手段17に伝えられ、図4に記載された情報として記憶される。
ているプロセス処理装置の内、故障等で運転に使用できない、又は保守(プラズマクリー
ニングも含む)の為使用しないプロセス処理装置があるか否かを判断する(30)。使用
できない(又は、使用しない)プロセス処理装置があれば、運転情報信号発生手段19を
用いて図4に記述した状態になるように設定する(32)。この設定の方法の一つとして
、
1)プロセス処理装置の装置電源の遮断信号を用いる場合は、該プロセス処理装置の装
置電源供給用電磁開閉器をOFFする。これにより、遮断信号が発生し、運転情報信号記
憶手段17に伝えられ、図4に記載された情報として記憶される。
2)プロセス処理装置の使用の有無を設定する運転切り替え信号(例えば、切り替えス
イッチ)を用いる場合は、該プロセス処理装置に割り当てられた切り替えスイッチを有効
又は無効の状態に設定する。これにより、切り替え信号が確定し、運転情報信号記憶手段
17に伝えられ、図4に記載された情報として記憶される。
イッチ)を用いる場合は、該プロセス処理装置に割り当てられた切り替えスイッチを有効
又は無効の状態に設定する。これにより、切り替え信号が確定し、運転情報信号記憶手段
17に伝えられ、図4に記載された情報として記憶される。
3)プロセス処理装置の使用の有効/無効を示す運転制御信号として、オペレータが設
定入力した入力情報を用いる場合は、オペレータは、該プロセス処理装置に割り当てられ
た設定情報を入力手段14より入力する。これにより、設定情報が確定し、運転情報信号
記憶手段17に伝えられ、図4に記載された情報として記憶される。装置接続構成を決定
した後、自動運転をスタートする(34)。
定入力した入力情報を用いる場合は、オペレータは、該プロセス処理装置に割り当てられ
た設定情報を入力手段14より入力する。これにより、設定情報が確定し、運転情報信号
記憶手段17に伝えられ、図4に記載された情報として記憶される。装置接続構成を決定
した後、自動運転をスタートする(34)。
尚、ウェハの処理する順序は以下のように製品処理条件として設定する。
1)ウエハの運転モードを選択する。
「1カセット1レシピ並列」、「2カセット1レシピ並列」、
「2カセット2レシピ並列」、「1カセット1レシピ直列」のいずれかを選択
2)ウエハの搬送経路を設定する。
「2カセット2レシピ並列」、「1カセット1レシピ直列」のいずれかを選択
2)ウエハの搬送経路を設定する。
カセット毎にウエハの処理経路をプロセス処理装置の記号を使ってパラレルまたはシリ
ーズ処理を設定する。代表的な設定例を以下に示す。(ウエハ処理経路は、前述のように
組み合わせが可能である)
2ー1)パラレル処理の場合:
C1:E1→A1、C1:E2→A2
C2:E1→A1、C2:E2→A2
E1:プロセス処理装置2ー2、E2:プロセス処理装置2ー3
A1:プロセス処理装置2ー1、A2:プロセス処理装置2ー4
2ー2)シリーズ処理の場合:
C1:E1→E2→A1
C2:E2→E1→A2
3)プロセス処理室毎にプロセス処理条件(プロセスレシピともいう)を設定する。
ーズ処理を設定する。代表的な設定例を以下に示す。(ウエハ処理経路は、前述のように
組み合わせが可能である)
2ー1)パラレル処理の場合:
C1:E1→A1、C1:E2→A2
C2:E1→A1、C2:E2→A2
E1:プロセス処理装置2ー2、E2:プロセス処理装置2ー3
A1:プロセス処理装置2ー1、A2:プロセス処理装置2ー4
2ー2)シリーズ処理の場合:
C1:E1→E2→A1
C2:E2→E1→A2
3)プロセス処理室毎にプロセス処理条件(プロセスレシピともいう)を設定する。
以上の製品処理条件を設定した後、自動運転開始の起動をかける。
図7は、自動運転フロー図を示す。自動運転を開始すると、処理すべきウェハを全て搬
送したかを判断し、搬送済であれば処理が終了し、搬送必要であれば、自動運転処理に進
む(40)。自動運転中に異常等が発生し、運転が一時中断した状態にあるか否かを判断
する(42)。異常が無ければ、運転を続行する(44へ)。運転に使用できないプロセ
ス処理装置がある場合は、該プロセス処理装置を使わないで運転続行が可能か否かをオペ
レータが判断する(70)。続行が不可能な場合は、オペレータが自動運転の中止設定を
行うことにより、装置は自動運転停止処理を行う(90)。
送したかを判断し、搬送済であれば処理が終了し、搬送必要であれば、自動運転処理に進
む(40)。自動運転中に異常等が発生し、運転が一時中断した状態にあるか否かを判断
する(42)。異常が無ければ、運転を続行する(44へ)。運転に使用できないプロセ
ス処理装置がある場合は、該プロセス処理装置を使わないで運転続行が可能か否かをオペ
レータが判断する(70)。続行が不可能な場合は、オペレータが自動運転の中止設定を
行うことにより、装置は自動運転停止処理を行う(90)。
続行が可能な場合でも、プロセス処理装置にウェハが残っている場合、真空ロボットの
ハンド上にウェハが残っている場合、ロードロック室やアンロードロック室にウェハが残
っている場合等がある。
ハンド上にウェハが残っている場合、ロードロック室やアンロードロック室にウェハが残
っている場合等がある。
このように自動運転中に異常が発生し、自動運転の続行ができなくなり自動運転が一時
中断した状態から引き続き自動運転を再開し、続行するため、異常が発生した機器内に残
存しているウェハを元のカセットに搬出する処理を行なう。これは自動運転中に異常が発
生した時点では処理装置内の全ウェハの搬送・処理のスケジュールが確定しているため、
異常が発生した機器にあるウェハを取り出したカセット7に戻さないとウェハの搬送・処
理のスケジュールが狂ってしまい、自動運転の一時中断状態からの再開、自動運転続行が
できなくなるためである。処理装置内に残存しているウェハの処置例を以下に示す。装置
内に残存ウェハがあるか否か判断する(72)。残存しているウェハのうちエッチング処
理をするか否かを判断する(74)。処理室内に残存しているウェハのうち、エッチング
処理の途中で異常が発生した場合は、残りのエッチング処理を実施した後(76)、ウェ
ハを元のカセットに戻す(78)。これはできうる限りウェハを救済するために行なうも
のである。また真空ロボットのウェハハンド上にウェハが残っている場合や、ロードロッ
ク室アンロードロック室にウェハが残っている場合は、機器個別の操作(ロック室の排気
/リーク,ウェハの搬送)を行なって、そのウェハを元のカセットに戻す(78)。以上
のように異常の発生した機器にあったウェハは必要な処置を実施し元のカセットに戻した
後、一時中断していた自動運転を再開する操作を行なう。このようにすることで異常が発
生した機器(処理室や真空ロボット等)にあったウェハのトラッキング情報は、正常な経
路で処理されたのと同等となり、自動運転が再開できることになる。以上のような処理装
置内に残存していたウェハの処置を行なった後、使用しないプロセス処理装置に対して図
6の(32)にて示した内容と同じ運転情報信号発生手段の切り替え操作(80)を行う
。異常発生情報をリセットし(82)、自動運転を続行する。
中断した状態から引き続き自動運転を再開し、続行するため、異常が発生した機器内に残
存しているウェハを元のカセットに搬出する処理を行なう。これは自動運転中に異常が発
生した時点では処理装置内の全ウェハの搬送・処理のスケジュールが確定しているため、
異常が発生した機器にあるウェハを取り出したカセット7に戻さないとウェハの搬送・処
理のスケジュールが狂ってしまい、自動運転の一時中断状態からの再開、自動運転続行が
できなくなるためである。処理装置内に残存しているウェハの処置例を以下に示す。装置
内に残存ウェハがあるか否か判断する(72)。残存しているウェハのうちエッチング処
理をするか否かを判断する(74)。処理室内に残存しているウェハのうち、エッチング
処理の途中で異常が発生した場合は、残りのエッチング処理を実施した後(76)、ウェ
ハを元のカセットに戻す(78)。これはできうる限りウェハを救済するために行なうも
のである。また真空ロボットのウェハハンド上にウェハが残っている場合や、ロードロッ
ク室アンロードロック室にウェハが残っている場合は、機器個別の操作(ロック室の排気
/リーク,ウェハの搬送)を行なって、そのウェハを元のカセットに戻す(78)。以上
のように異常の発生した機器にあったウェハは必要な処置を実施し元のカセットに戻した
後、一時中断していた自動運転を再開する操作を行なう。このようにすることで異常が発
生した機器(処理室や真空ロボット等)にあったウェハのトラッキング情報は、正常な経
路で処理されたのと同等となり、自動運転が再開できることになる。以上のような処理装
置内に残存していたウェハの処置を行なった後、使用しないプロセス処理装置に対して図
6の(32)にて示した内容と同じ運転情報信号発生手段の切り替え操作(80)を行う
。異常発生情報をリセットし(82)、自動運転を続行する。
正常な運転状態では、次のウェハの搬送経路を処理順序情報記憶手段16に記憶されて
ある情報を読み出し(44)、運転情報信号記憶手段17に記憶されてある情報と整合処
理し搬送順路を決定する(46)。決定した搬送順路はカセットより搬出するウェハ毎に
搬送順路データを持っても良いし、処理順序情報記憶手段16とは別の処理順序情報テー
ブルを作成し、ウェハを搬送する際には、このテーブルを参照するようにしても良い。搬
送順路が決定すると大気ロボット8はカセット7よりウェハを搬出し(48)、上記決定
した搬送順路に登録されてあるプロセス処理装置に搬送し(50)、ウェハの処理を行う
(52)。このウェハ搬送処理及びプロセス処理で異常が発生した場合は、引き続き自動
運転を継続する為に処理続行可能な処理はその個々の処理を終了させるまで実行した後、
自動運転を一時中断状態にする。(例えばN枚目のウェハのエッチング処理中であれば、
そのN枚目のウェハのエッチング処理が終了するまでエッチング処理を継続し、終了した
時点で自動運転を一時中断する。また真空ロボット5によるウェハ搬送中に他の処理で異
常が発生したら、真空ロボット5は、所定の場所へのウェハ搬送を終了した時点で自動運
転を一時中断する。)この後異常発生したことを示す異常発生情報(図示は無し)を記憶
させた後、装置を一時中断状態にオペレータに中断したことを表示手段13に表示すると
ともに図示しないブザーを鳴らす。この後(42)に戻り、所定のフローで処理する。
ある情報を読み出し(44)、運転情報信号記憶手段17に記憶されてある情報と整合処
理し搬送順路を決定する(46)。決定した搬送順路はカセットより搬出するウェハ毎に
搬送順路データを持っても良いし、処理順序情報記憶手段16とは別の処理順序情報テー
ブルを作成し、ウェハを搬送する際には、このテーブルを参照するようにしても良い。搬
送順路が決定すると大気ロボット8はカセット7よりウェハを搬出し(48)、上記決定
した搬送順路に登録されてあるプロセス処理装置に搬送し(50)、ウェハの処理を行う
(52)。このウェハ搬送処理及びプロセス処理で異常が発生した場合は、引き続き自動
運転を継続する為に処理続行可能な処理はその個々の処理を終了させるまで実行した後、
自動運転を一時中断状態にする。(例えばN枚目のウェハのエッチング処理中であれば、
そのN枚目のウェハのエッチング処理が終了するまでエッチング処理を継続し、終了した
時点で自動運転を一時中断する。また真空ロボット5によるウェハ搬送中に他の処理で異
常が発生したら、真空ロボット5は、所定の場所へのウェハ搬送を終了した時点で自動運
転を一時中断する。)この後異常発生したことを示す異常発生情報(図示は無し)を記憶
させた後、装置を一時中断状態にオペレータに中断したことを表示手段13に表示すると
ともに図示しないブザーを鳴らす。この後(42)に戻り、所定のフローで処理する。
図8は、異常発生後の自動運転再開処理図を示す。以下に図7で述べた自動運転中に異
常が発生した後の自動運転再開迄の処理について説明する。図Aは表1での「1カセット
1レシピ並列運転」の運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転し、E2では(N)枚目
のウエハがエッチング処理中でA1では(Nー1)枚目のウエハが後処理中の時に図Bに
示すようにE2で異常が発生すると、エッチング処理は終了しA1の(Nー1)枚目のウ
エハは後処理終了後、アンロードロック室4に搬出しないで自動運転を一時中断する。E
2で異常の発生した(N)枚目ウエハについては図7の76と78の処置を行う。その後
E2とA2については図7の80の運転情報信号発生手段による切替操作として図6の説
明で説明した1)または2)または3)の操作を行い、図4で示したようにプロセス処理
装置3(E2)、プロセス処理装置4(A2)の運転情報を「無効:0」とする。この後
異常発生情報をリセット(図7の80)し、自動運転を再開する。再開後は図Cのように
A2の(Nー1)枚目のウエハはアンロードロック室4に搬送され、以降はE1とA1と
を使って処理を続行する。
常が発生した後の自動運転再開迄の処理について説明する。図Aは表1での「1カセット
1レシピ並列運転」の運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転し、E2では(N)枚目
のウエハがエッチング処理中でA1では(Nー1)枚目のウエハが後処理中の時に図Bに
示すようにE2で異常が発生すると、エッチング処理は終了しA1の(Nー1)枚目のウ
エハは後処理終了後、アンロードロック室4に搬出しないで自動運転を一時中断する。E
2で異常の発生した(N)枚目ウエハについては図7の76と78の処置を行う。その後
E2とA2については図7の80の運転情報信号発生手段による切替操作として図6の説
明で説明した1)または2)または3)の操作を行い、図4で示したようにプロセス処理
装置3(E2)、プロセス処理装置4(A2)の運転情報を「無効:0」とする。この後
異常発生情報をリセット(図7の80)し、自動運転を再開する。再開後は図Cのように
A2の(Nー1)枚目のウエハはアンロードロック室4に搬送され、以降はE1とA1と
を使って処理を続行する。
次に、運転情報を「無効:0」としたプロセス処理装置3(E2)、プロセス処理装置
4(A2)については、補助操作盤22を使って異常原因を究明する為にプロセス処理装
置3(E2)、プロセス処理装置4(A2)に対して機器動作を行う為の操作入力が行え
る。例えば、プロセス処理装置3(E2)内の本図に示していないウエハ押し上げ操作を
行い動作を確認する。
4(A2)については、補助操作盤22を使って異常原因を究明する為にプロセス処理装
置3(E2)、プロセス処理装置4(A2)に対して機器動作を行う為の操作入力が行え
る。例えば、プロセス処理装置3(E2)内の本図に示していないウエハ押し上げ操作を
行い動作を確認する。
このような操作により異常原因を対策でき、「無効:0」としたプロセス処理装置3(
E2)、プロセス処理装置4(A2)をウエハの処理経路に復帰させる手順を以下に示す
。次に図Cの運転中に自動運転の中断操作を行い、運転モードの処理経路から切り離した
E2とA2とを有効と設定することで図Aに移行することができ、
運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転できる。
E2)、プロセス処理装置4(A2)をウエハの処理経路に復帰させる手順を以下に示す
。次に図Cの運転中に自動運転の中断操作を行い、運転モードの処理経路から切り離した
E2とA2とを有効と設定することで図Aに移行することができ、
運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転できる。
図9は、自動運転中の処理装置運転切り離し処理図を示す。以下に図7で述べた自動運
転中にE2とA2を自動運転処理経路から切り離した後自動運転を再開する処理について
説明する。図Aは図8の図Aの運転経路と同じである。表1での「1カセット1レシピ並
列運転」の運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転し、E2では(N)枚目
のウエハがエッチング処理中でA1では(Nー1)枚目のウエハが後処理中の時に図Aに
示すようにE2とA2に運転停止操作により停止指示が出されると、A1の(Nー1)枚
目のウエハは後処理終了後、元のカセットに戻され、(N)枚目のウエハのエッチング処
理が終了しA2に搬送され後処理終了後元のカセットに戻される。ところで、E2とA2
は運転停止状態となっている為(N+1)枚目以降のウエハは、E1とA1とを使って運
転が続行される。
転中にE2とA2を自動運転処理経路から切り離した後自動運転を再開する処理について
説明する。図Aは図8の図Aの運転経路と同じである。表1での「1カセット1レシピ並
列運転」の運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転し、E2では(N)枚目
のウエハがエッチング処理中でA1では(Nー1)枚目のウエハが後処理中の時に図Aに
示すようにE2とA2に運転停止操作により停止指示が出されると、A1の(Nー1)枚
目のウエハは後処理終了後、元のカセットに戻され、(N)枚目のウエハのエッチング処
理が終了しA2に搬送され後処理終了後元のカセットに戻される。ところで、E2とA2
は運転停止状態となっている為(N+1)枚目以降のウエハは、E1とA1とを使って運
転が続行される。
上記では、自動運転中にE2とA2を自動運転処理経路から切り離す手段として運転停
止操作により停止指示を出すことで切り離しを行ったが、別の方法として処理装置内に組
み込んだ検出器の機能によって停止指示を出すこともできる。一例としては、処理装置内
に組み込んだ異物モニタ装置からの異物測定モニタ値が運転前に設定した設定値を超過し
たことを検知し、この超過した信号をもって自動運転中にE2とA2に停止指示を出すこ
とで運転停止操作と同じ機能を行える。
止操作により停止指示を出すことで切り離しを行ったが、別の方法として処理装置内に組
み込んだ検出器の機能によって停止指示を出すこともできる。一例としては、処理装置内
に組み込んだ異物モニタ装置からの異物測定モニタ値が運転前に設定した設定値を超過し
たことを検知し、この超過した信号をもって自動運転中にE2とA2に停止指示を出すこ
とで運転停止操作と同じ機能を行える。
また切り離したプロセス処理装置をウエハの搬送経路に復帰させる手順は、図9の説明
で示した内容と同じである。
で示した内容と同じである。
図10は、パイロットカセット処理図を示す。これは自動運転中に割り込み特急処理を
行い、その処理終了後は元の処理を再開し続行するものである。以下に図7で述べた自動
運転中に特定の(この場合はE2とA2とする) 処理装置を現在運転中の運転モードの
処理経路から切り離し、その切り離したE2とA2とを使ってそれまでに運転していたプ
ロセス処理条件とは異なるプロセス処理条件で処理するカセット(このカセットのことを
パイロットカセットと呼ぶ)を割り込んで処理後、元の自動運転を再開し続行する処理に
ついて説明する。図Aは図8での運転経路と同じである。表1での「1カセット1レシピ
並列運転」の運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転し、E2ではC1カセッ
トの(N)枚目のウエハがエッチング処理中で、A1ではC1カセットの(Nー1)枚目
のウエハが後処理中の時に図Aに示すようにE2とA2を使った割り込み特急処理を行う
為に自動運転の中断操作を行う。E2とA2に運転停止操作により停止指示が出されると
、A1の(Nー1)枚目のウエハは後処理終了後、元のカセットに戻され、(N)枚目の
ウエハはエッチング処理が終了しA2に搬送され後処理終了後元のカセットに戻される。
行い、その処理終了後は元の処理を再開し続行するものである。以下に図7で述べた自動
運転中に特定の(この場合はE2とA2とする) 処理装置を現在運転中の運転モードの
処理経路から切り離し、その切り離したE2とA2とを使ってそれまでに運転していたプ
ロセス処理条件とは異なるプロセス処理条件で処理するカセット(このカセットのことを
パイロットカセットと呼ぶ)を割り込んで処理後、元の自動運転を再開し続行する処理に
ついて説明する。図Aは図8での運転経路と同じである。表1での「1カセット1レシピ
並列運転」の運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転し、E2ではC1カセッ
トの(N)枚目のウエハがエッチング処理中で、A1ではC1カセットの(Nー1)枚目
のウエハが後処理中の時に図Aに示すようにE2とA2を使った割り込み特急処理を行う
為に自動運転の中断操作を行う。E2とA2に運転停止操作により停止指示が出されると
、A1の(Nー1)枚目のウエハは後処理終了後、元のカセットに戻され、(N)枚目の
ウエハはエッチング処理が終了しA2に搬送され後処理終了後元のカセットに戻される。
ところで、E2とA2は運転停止状態となっている為(N+1)枚目以降のウエハは、E
1とA1とを使って運転が続行される(図C)。E1とA1とを使った運転中に、E2と
A2とを使った割り込み特急処理のカセットがC2(7ー2)に置かれ割り込み処理の起
動運転が掛かけられる(図C)とその時迄にC1(7−1)カセットから抜き出されたウ
エハが全て処理されC1カセットに搬入後、C1カセット内ウエハのE1とA1とを使っ
た運転は一時中断状態となり、割り込み特急処理用のカセットC2内ウエハの処理が開始
される(図D)。C2カセットのウエハについては順次E2 → A2の処理を行いC2
カセットに搬入する。パイロットカセットの処理が終了すると割り込み処理終了と一時中
断状態の運転の再開設定を行い、中断していたC1(7−1)カセットからウエハの処理
が再開する(図Cの状態に戻る)。次に図Cに戻った状態で運転中に自動運転の中断操作
を行い、運転モードの処理経路から切り離したE2とA2とを有効と設定することで図A
に移行することができ、運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転できる。
1とA1とを使って運転が続行される(図C)。E1とA1とを使った運転中に、E2と
A2とを使った割り込み特急処理のカセットがC2(7ー2)に置かれ割り込み処理の起
動運転が掛かけられる(図C)とその時迄にC1(7−1)カセットから抜き出されたウ
エハが全て処理されC1カセットに搬入後、C1カセット内ウエハのE1とA1とを使っ
た運転は一時中断状態となり、割り込み特急処理用のカセットC2内ウエハの処理が開始
される(図D)。C2カセットのウエハについては順次E2 → A2の処理を行いC2
カセットに搬入する。パイロットカセットの処理が終了すると割り込み処理終了と一時中
断状態の運転の再開設定を行い、中断していたC1(7−1)カセットからウエハの処理
が再開する(図Cの状態に戻る)。次に図Cに戻った状態で運転中に自動運転の中断操作
を行い、運転モードの処理経路から切り離したE2とA2とを有効と設定することで図A
に移行することができ、運転モードでウエハの搬送経路が
C1:E1→A1及びE2→A2
C2:E1→A1及びE2→A2にて運転できる。
以上に述べた内容でも分かるように故障等で運転に使用できない、又は修復や保守(プ
ラズマクリーニングも含む)の為使用しないプロセス処理装置は、運転情報信号記憶手段
17に記憶されており、装置制御手段はこの情報を参照して運転を進める為、無効と設定
したプロセス処理装置に搬送することはない。又この無効と設定したプロセス処理装置で
は、修復、保守及び不具合原因を行うために、続行している自動運転でのウェハ処理と並
行してメンテナンス操作(例えば、プラズマクリーニング処理、ガスライン排気処理、ウ
ェハプッシャーの押上げ/押下げ動作)を行なうことができる。この場合無効と設定した
プロセス処理装置に対して機側で修復、保守及び不具合原因のための操作入力としては前
述の補助操作盤22を用いる。ところで通常生産ラインでは、図1に示す大気搬送装置6
がクリーンルーム側に搬送処理装置1、プロセス処理装置2−1〜2−4は、メンテルー
ム側に設置されており、クリーンルーム側とメンテルーム側との間は、パーテーションで
区切られており、片側から他方は、充分に視界がきかない場合がある。また補助操作盤2
2は、主制御部11にも接続されているが、補助操作盤22は主制御部11とは、普通は
離れた場所でかつ別々の人が操作することがある。このような場合に、どちらの操作部で
も操作ができるようにしておくと、特に機側で補助操作盤22を用いて操作する場合、操
作しているオペレータに対して安全上の災害の発生させることが考えられるため、この災
害を防止するため補助操作盤22を用いて機側でプロセス処理装置に操作(例えばウエハ
押し上げの上昇/下降操作)を行なう時は、主制御部11は機器への操作ができないよう
に機能上インターロックをかけている。
ラズマクリーニングも含む)の為使用しないプロセス処理装置は、運転情報信号記憶手段
17に記憶されており、装置制御手段はこの情報を参照して運転を進める為、無効と設定
したプロセス処理装置に搬送することはない。又この無効と設定したプロセス処理装置で
は、修復、保守及び不具合原因を行うために、続行している自動運転でのウェハ処理と並
行してメンテナンス操作(例えば、プラズマクリーニング処理、ガスライン排気処理、ウ
ェハプッシャーの押上げ/押下げ動作)を行なうことができる。この場合無効と設定した
プロセス処理装置に対して機側で修復、保守及び不具合原因のための操作入力としては前
述の補助操作盤22を用いる。ところで通常生産ラインでは、図1に示す大気搬送装置6
がクリーンルーム側に搬送処理装置1、プロセス処理装置2−1〜2−4は、メンテルー
ム側に設置されており、クリーンルーム側とメンテルーム側との間は、パーテーションで
区切られており、片側から他方は、充分に視界がきかない場合がある。また補助操作盤2
2は、主制御部11にも接続されているが、補助操作盤22は主制御部11とは、普通は
離れた場所でかつ別々の人が操作することがある。このような場合に、どちらの操作部で
も操作ができるようにしておくと、特に機側で補助操作盤22を用いて操作する場合、操
作しているオペレータに対して安全上の災害の発生させることが考えられるため、この災
害を防止するため補助操作盤22を用いて機側でプロセス処理装置に操作(例えばウエハ
押し上げの上昇/下降操作)を行なう時は、主制御部11は機器への操作ができないよう
に機能上インターロックをかけている。
以上の内容でもって、自動運転中にその処理に使用していない処理室を使った処理、及
びその処理室への操作を実行することができる。
びその処理室への操作を実行することができる。
1…搬送処理装置、2−1,2,3,4…プロセス処理装置、3…ロードロック室、4
…アンロードロック室、5…真空ロボット、6…大気搬送装置、7…カセット、8…大気
ロボット、11…主制御部、12…中央制御手段、13…表示手段、14…入力手段、1
5…装置制御手段、16…処理順序情報記憶手段、17…運転情報信号記憶手段、18−
1,2,3,4…プロセス処理装置、19−1,2,3,4…運転情報信号発生手段、2
0,21…通信手段、22…補助操作盤、23…中央制御手段、24…端末制御手段、2
5…入力手段、26…表示手段。
…アンロードロック室、5…真空ロボット、6…大気搬送装置、7…カセット、8…大気
ロボット、11…主制御部、12…中央制御手段、13…表示手段、14…入力手段、1
5…装置制御手段、16…処理順序情報記憶手段、17…運転情報信号記憶手段、18−
1,2,3,4…プロセス処理装置、19−1,2,3,4…運転情報信号発生手段、2
0,21…通信手段、22…補助操作盤、23…中央制御手段、24…端末制御手段、2
5…入力手段、26…表示手段。
Claims (2)
- ウェハを真空処理する複数の真空処理室と、該各真空処理室にウェハを搬入出する真空
搬送手段と、前記各真空処理室へウェハを搬入出するための大気雰囲気もしくは真空雰囲
気に切り替え可能な室と、ウェハを収納できる複数のカセットを載置し得るカセット載置
手段と、該カセット載置手段上の任意のカセット内からウェハを抜き取れるように構成さ
れた搬送手段と、前記任意のカセット内のウェハを前記搬送手段及び前記切り替え可能な
室並びに前記真空搬送手段を介して各真空処理室に搬入し、前記各真空処理室で真空処理
された処理済ウェハを搬出するための搬送制御を行う制御手段とで構成された真空処理装
置において、
少なくとも2つのカセットを使用し、カセットに収納されたウエハを前記搬送手段及び前記切り替え可能な室並びに前記真空搬送手段を介してカセット毎に前記いずれかの真空処理室へ搬送し、搬送されたウエハに前記真空処理室毎に異なるレシピを適用して異なる処理を施す並列処理、及び1つのカセットに収納されたウエハに共通のレシピを適用して各真空処理室で共通の処理を施す並列処理の何れかを選択的に施すとともに前記並列処理を施した後のウェハを前記切り替え可能な室を介してもとのカセットに戻し、かつ、いずれかの真空処理室に装置停止の必要が生じたとき、装置停止の必要が生じた真空処理室に対するカセットからのウェハの搬出を中断し、前記装置停止の必要が生じた真空処理室にあったウェハをもとのカセットに戻したのち装置停止の必要がない真空処理室に対するカセットからのウェハの搬出を継続し処埋を再開することを特徴とする真空処理装置。 - カセット載置手段に載置される任意のカセット内からウェハを抜き取り、大気雰囲気もしくは真空雰囲気に切り替え可能な室を経由して複数の真空処理室に搬送し、ウェハの真空処理を行う真空処理方法において、
少なくとも2つのカセットを使用し、カセットに収納されたウエハを抜き取れるように構成された搬送手段、前記切り替え可能な室並びに真空搬送手段を介して搬送し、搬送されたウエハに前記真空処理室毎に異なるレシピを適用して異なる処理を施す並列処理、及びカセットに収納されたウエハに共通のレシピを適用して各真空処理室で共通の処理を施す並列処理の何れかを選択的に施すとともに前記並列処理を施した後のウエハを前記切り替え可能な室を介してもとのカセットに戻し、かつ、いずれかの真空処理室に装置停止の必要が生じたとき、装置停止の必要が生じた真空処理室に対するカセットからのウェハの搬出を中断し、前記装置停止の必要が生じた真空処理室にあったウェハをもとのカセットに戻したのち装置停止の必要がない真空処理室に対するカセットからのウェハの搬出を継続し処埋を再開することを特徴とする真空処埋方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008011466A JP2008166830A (ja) | 2008-01-22 | 2008-01-22 | 真空処理方法及び真空処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008011466A JP2008166830A (ja) | 2008-01-22 | 2008-01-22 | 真空処理方法及び真空処理装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004153482A Division JP4121480B2 (ja) | 2004-05-24 | 2004-05-24 | 真空処理方法及び真空処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008166830A true JP2008166830A (ja) | 2008-07-17 |
| JP2008166830A5 JP2008166830A5 (ja) | 2009-04-30 |
Family
ID=39695744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008011466A Pending JP2008166830A (ja) | 2008-01-22 | 2008-01-22 | 真空処理方法及び真空処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008166830A (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0555148A (ja) * | 1991-08-27 | 1993-03-05 | Toshiba Mach Co Ltd | マルチチヤンバ型枚葉処理方法およびその装置 |
| JPH07106215A (ja) * | 1993-10-08 | 1995-04-21 | Kokusai Electric Co Ltd | 半導体製造装置における障害処理方法 |
| JPH0917838A (ja) * | 1995-06-27 | 1997-01-17 | Tokyo Electron Ltd | 処理方法及び処理装置 |
| JPH0950948A (ja) * | 1995-08-08 | 1997-02-18 | Kokusai Electric Co Ltd | 半導体製造装置の障害対処システム |
-
2008
- 2008-01-22 JP JP2008011466A patent/JP2008166830A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0555148A (ja) * | 1991-08-27 | 1993-03-05 | Toshiba Mach Co Ltd | マルチチヤンバ型枚葉処理方法およびその装置 |
| JPH07106215A (ja) * | 1993-10-08 | 1995-04-21 | Kokusai Electric Co Ltd | 半導体製造装置における障害処理方法 |
| JPH0917838A (ja) * | 1995-06-27 | 1997-01-17 | Tokyo Electron Ltd | 処理方法及び処理装置 |
| JPH0950948A (ja) * | 1995-08-08 | 1997-02-18 | Kokusai Electric Co Ltd | 半導体製造装置の障害対処システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100493644B1 (ko) | 진공처리장치의운전방법 | |
| US6795745B1 (en) | Methods of operating vacuum processing equipment and methods of processing wafers | |
| JP3384292B2 (ja) | 真空処理装置の運転方法及び真空処理装置 | |
| WO2006104018A1 (ja) | 基板処理装置及び基板処理システム | |
| US6885906B2 (en) | Operating method of vacuum processing system and vacuum processing system | |
| JP5107961B2 (ja) | 真空処理装置及び真空処理方法 | |
| US8731698B2 (en) | Substrate receiving method and controller | |
| JP5424628B2 (ja) | 真空処理装置 | |
| JP3771347B2 (ja) | 真空処理装置及び真空処理方法 | |
| JP4030509B2 (ja) | 真空処理方法及び真空処理装置 | |
| US9818629B2 (en) | Substrate processing apparatus and non-transitory computer-readable recording medium | |
| JP3850710B2 (ja) | 真空処理装置の運転方法 | |
| JP4121480B2 (ja) | 真空処理方法及び真空処理装置 | |
| JP4252103B2 (ja) | 真空処理方法及び真空処理装置 | |
| JP2008193118A (ja) | 真空処理装置及び真空処理方法 | |
| JP5314789B2 (ja) | 真空処理装置及び真空処理方法 | |
| JP2008109134A (ja) | 真空処理装置及び真空処理方法 | |
| JP5562387B2 (ja) | 真空処理装置及び真空処理方法 | |
| JPH0684739A (ja) | 半導体製造装置の停電処理装置 | |
| JP2008166830A (ja) | 真空処理方法及び真空処理装置 | |
| JP2008153690A (ja) | 真空処理方法及び真空処理装置 | |
| JP3538416B2 (ja) | 真空処理方法及び真空処理装置 | |
| JP2008311461A (ja) | 基板処理装置 | |
| KR100492261B1 (ko) | 진공 처리장치 및 진공처리방법 | |
| JP2006339662A (ja) | 半導体製造装置の障害対処システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110215 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111018 |