JP2007126081A - ハイブリッド車両のクラッチ伝達トルク容量制御装置 - Google Patents
ハイブリッド車両のクラッチ伝達トルク容量制御装置 Download PDFInfo
- Publication number
- JP2007126081A JP2007126081A JP2005322198A JP2005322198A JP2007126081A JP 2007126081 A JP2007126081 A JP 2007126081A JP 2005322198 A JP2005322198 A JP 2005322198A JP 2005322198 A JP2005322198 A JP 2005322198A JP 2007126081 A JP2007126081 A JP 2007126081A
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- motor
- torque capacity
- generator
- transmission torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/184—Preventing damage resulting from overload or excessive wear of the driveline
- B60W30/186—Preventing damage resulting from overload or excessive wear of the driveline excessive wear or burn out of friction elements, e.g. clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2045—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for optimising the use of energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/50—Drive Train control parameters related to clutches
- B60L2240/507—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0275—Clutch torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0657—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Abstract
【課題】車輪駆動力の少なくとも一部をモータトルクにより賄うモード時に、エンジンおよびモータからの動力の双方を伝達するクラッチの容量を最適にして燃費改善を図る。
【解決手段】S21で、車両過渡応答分伝達トルク容量を目標入力軸トルクtTiと、車両過渡応答用安全率との乗算により求め、S22で、エンジントルク分担分の伝達トルク容量を目標エンジントルクtTeと、エンジン用の安全率(1.3)との乗算により求め、S23で、モータ/ジェネレータトルク分担分の伝達トルク容量を目標モータ/ジェネレータトルクtTmと、モータ/ジェネレータ用の安全率(1.0)との乗算により求め、S24で、クラッチ応答分伝達トルク容量を目標入力軸トルクtTiと、クラッチ応答用安全率との乗算により求め、S25で、イナーシャトルク分伝達トルク容量を求め、S26で、上記の5者を合算してHEVモードでの目標第2クラッチ伝達トルク容量tTc2とする。
【選択図】図7
【解決手段】S21で、車両過渡応答分伝達トルク容量を目標入力軸トルクtTiと、車両過渡応答用安全率との乗算により求め、S22で、エンジントルク分担分の伝達トルク容量を目標エンジントルクtTeと、エンジン用の安全率(1.3)との乗算により求め、S23で、モータ/ジェネレータトルク分担分の伝達トルク容量を目標モータ/ジェネレータトルクtTmと、モータ/ジェネレータ用の安全率(1.0)との乗算により求め、S24で、クラッチ応答分伝達トルク容量を目標入力軸トルクtTiと、クラッチ応答用安全率との乗算により求め、S25で、イナーシャトルク分伝達トルク容量を求め、S26で、上記の5者を合算してHEVモードでの目標第2クラッチ伝達トルク容量tTc2とする。
【選択図】図7
Description
本発明は、エンジン以外にモータ/ジェネレータからの動力によっても走行することができ、モータ/ジェネレータからの動力のみにより走行する電気走行(EV)モードと、エンジンおよびモータ/ジェネレータの双方からの動力により走行可能なハイブリッド走行(HEV)モードとを有するハイブリッド車両に関し、特に、車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いた走行中に、エンジンおよびモータ/ジェネレータからの動力の双方を駆動車輪に向かわせるクラッチの伝達トルク容量を適切に制御するための装置に関するものである。
上記のようなハイブリッド車両に用いるハイブリッド駆動装置としては従来、様々な型式のものが提案されているが、そのうちの1つとして、特許文献1に記載のごときものが知られている。
このハイブリッド駆動装置は、エンジン回転を変速機に向かわせる軸に結合して、これらエンジンおよび変速機間にモータ/ジェネレータを具え、エンジンおよびモータ/ジェネレータ間を切り離し可能に結合する第1クラッチを有すると共に、モータ/ジェネレータおよび変速機出力軸間を切り離し可能に結合する第2クラッチをトルクコンバータの代わりに有した構成になるものである。
このハイブリッド駆動装置は、エンジン回転を変速機に向かわせる軸に結合して、これらエンジンおよび変速機間にモータ/ジェネレータを具え、エンジンおよびモータ/ジェネレータ間を切り離し可能に結合する第1クラッチを有すると共に、モータ/ジェネレータおよび変速機出力軸間を切り離し可能に結合する第2クラッチをトルクコンバータの代わりに有した構成になるものである。
かかるハイブリッド駆動装置を具えたハイブリッド車両は、第1クラッチを解放すると共に第2クラッチを締結する場合、モータ/ジェネレータからの動力のみにより走行する電気走行(EV)モードとなり、第1クラッチおよび第2クラッチをともに締結する場合、エンジンおよびモータ/ジェネレータの双方からの動力により走行可能なハイブリッド走行(HEV)モードとなり得る。
従って上記の第2クラッチが、エンジンおよびモータ/ジェネレータからの動力の双方を駆動車輪に向かわせるクラッチに相当し、該第2クラッチの伝達トルク容量が本発明の制御対象である。
特開平11−082260号公報
従って上記の第2クラッチが、エンジンおよびモータ/ジェネレータからの動力の双方を駆動車輪に向かわせるクラッチに相当し、該第2クラッチの伝達トルク容量が本発明の制御対象である。
主動力源としてエンジンを搭載した車両にあって、伝動系における上記第2クラッチのようなクラッチの伝達トルク容量制御に際しては、自動変速機内のクラッチやブレーキの締結力制御に際して行われているように、該クラッチへの入力トルクに関与する主動力源としてのエンジンのトルク情報をエンジンスロットル開度やアクセル開度から入手し、これと、クラッチのスリップ防止用に設定した安全率とから、クラッチの伝達トルク容量を決定するのが常套である。
ところでエンジントルクは、静的な不定分や、脈動分を内包するほか、動特性をもったものであり、これらによってもクラッチがスリップすることのないようにする必要があり、エンジントルクの静的な不定分や、脈動分や、動特性を考慮して必然的に上記の安全率を例えば1.3のような大きな安全率に設定する必要がある。
従って、主動力源としてのエンジンのほかにモータ/ジェネレータをも動力源として搭載した前記ハイブリッド車両の場合も、その伝動系に挿置した前記第2クラッチの伝達トルク容量制御に際しては、主動力源であるエンジン用の大きな安全率を用いて第2クラッチの伝達トルク容量を決定するのが常識的である。
しかし、かようにエンジン用の大きな安全率を用いて第2クラッチの伝達トルク容量を決定するのでは、車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いた、EVモードでの走行中は勿論のこと、HEVモードや、これらモード間でのモード切り替え時に、前記第2クラッチの伝達トルク容量が過大になり、後述の問題を生ずる。
つまり、モータ/ジェネレータはエンジンに比べて、トルクの静的な不定分や脈動が少なく、制御の応答性も高いことから、モータ/ジェネレータのトルク分担分について第2クラッチの伝達トルク容量を決定する場合に用いるモータ/ジェネレータ用の安全率は、エンジン用の安全率より大幅に低下しても第2クラッチのスリップを生ずることがない。
これがため、常時エンジン用の大きな安全率を用いて第2クラッチの伝達トルク容量を決定するのでは、車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いた、EVモードや、HEVモードや、これらモード間でのモード切り替え時に、第2クラッチの伝達トルク容量が過大となり、容量過大分のエネルギーが無駄に費やされて燃費の悪化や動力性能の低下を招く。
これがため、常時エンジン用の大きな安全率を用いて第2クラッチの伝達トルク容量を決定するのでは、車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いた、EVモードや、HEVモードや、これらモード間でのモード切り替え時に、第2クラッチの伝達トルク容量が過大となり、容量過大分のエネルギーが無駄に費やされて燃費の悪化や動力性能の低下を招く。
本発明は、車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いる場合、モータ/ジェネレータのトルク分担分については第2クラッチの伝達トルク容量の決定に際し、小さくすることが可能なモータ/ジェネレータ用の安全率を用いて当該決定を行うようにすることで、第2クラッチの伝達トルク容量が過大になるのを防止して上記した燃費の悪化や動力性能の低下に関する問題を回避し得るようにしたハイブリッド車両のクラッチ伝達トルク容量制御装置を提案することを目的とする。
この目的のため、本発明によるハイブリッド車両のクラッチ伝達トルク容量制御装置は、請求項1に記載した以下の構成とする。
先ず、前提となるハイブリッド車両を説明するに、これは、
動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよびモータ/ジェネレータ間に伝達トルク容量を変更可能な第1クラッチを介在させ、モータ/ジェネレータおよび駆動車輪間に伝達トルク容量を変更可能な第2クラッチを介在させ、
エンジンを停止させ、第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチを共に締結することによりエンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能にしたものである。
先ず、前提となるハイブリッド車両を説明するに、これは、
動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよびモータ/ジェネレータ間に伝達トルク容量を変更可能な第1クラッチを介在させ、モータ/ジェネレータおよび駆動車輪間に伝達トルク容量を変更可能な第2クラッチを介在させ、
エンジンを停止させ、第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチを共に締結することによりエンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能にしたものである。
本発明は、かかるハイブリッド車両において、
車輪駆動力の少なくとも一部として前記モータ/ジェネレータからの動力を用いた走行中、前記第2クラッチの伝達トルク容量を、モータ/ジェネレータのトルク分担分については、モータ/ジェネレータトルクとモータ/ジェネレータ用の安全率とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求めるよう構成した点に特徴づけられる。
車輪駆動力の少なくとも一部として前記モータ/ジェネレータからの動力を用いた走行中、前記第2クラッチの伝達トルク容量を、モータ/ジェネレータのトルク分担分については、モータ/ジェネレータトルクとモータ/ジェネレータ用の安全率とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求めるよう構成した点に特徴づけられる。
上記した本発明によるハイブリッド車両のクラッチ伝達トルク容量制御装置によれば、
車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いた走行中、第2クラッチの伝達トルク容量を、モータ/ジェネレータのトルク分担分については、モータ/ジェネレータトルクとモータ/ジェネレータ用の安全率とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求めるため、
モータ/ジェネレータのトルク分担分についての安全率が適切で、モータ/ジェネレータのトルク分担分について第2クラッチの伝達トルク容量が過大になることがなく、前記した燃費の悪化や動力性能の低下に関する問題を回避することができる。
車輪駆動力の少なくとも一部としてモータ/ジェネレータからの動力を用いた走行中、第2クラッチの伝達トルク容量を、モータ/ジェネレータのトルク分担分については、モータ/ジェネレータトルクとモータ/ジェネレータ用の安全率とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求めるため、
モータ/ジェネレータのトルク分担分についての安全率が適切で、モータ/ジェネレータのトルク分担分について第2クラッチの伝達トルク容量が過大になることがなく、前記した燃費の悪化や動力性能の低下に関する問題を回避することができる。
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
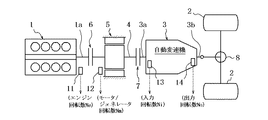
図1は、本発明のクラッチ伝達トルク容量制御装置を適用可能なハイブリッド駆動装置を具えたフロントエンジン・リヤホイールドライブ式ハイブリッド車両のパワートレーンを示し、1はエンジン、2は駆動車輪(後輪)である。
図1に示すハイブリッド車両のパワートレーンにおいては、通常の後輪駆動車と同様にエンジン1の車両前後方向後方に自動変速機3をタンデムに配置し、エンジン1(クランクシャフト1a)からの回転を自動変速機3の入力軸3aへ伝達する軸4に結合してモータ/ジェネレータ5を設ける。
図1は、本発明のクラッチ伝達トルク容量制御装置を適用可能なハイブリッド駆動装置を具えたフロントエンジン・リヤホイールドライブ式ハイブリッド車両のパワートレーンを示し、1はエンジン、2は駆動車輪(後輪)である。
図1に示すハイブリッド車両のパワートレーンにおいては、通常の後輪駆動車と同様にエンジン1の車両前後方向後方に自動変速機3をタンデムに配置し、エンジン1(クランクシャフト1a)からの回転を自動変速機3の入力軸3aへ伝達する軸4に結合してモータ/ジェネレータ5を設ける。
モータ/ジェネレータ5は、モータとして作用したり、ジェネレータ(発電機)として作用するもので、エンジン1および自動変速機3間に配置する。
このモータ/ジェネレータ5およびエンジン1間に、より詳しくは、軸4とエンジンクランクシャフト1aとの間に第1クラッチ6を介挿し、この第1クラッチ6によりエンジン1およびモータ/ジェネレータ5間を切り離し可能に結合する。
ここで第1クラッチ6は、伝達トルク容量を連続的または段階的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
このモータ/ジェネレータ5およびエンジン1間に、より詳しくは、軸4とエンジンクランクシャフト1aとの間に第1クラッチ6を介挿し、この第1クラッチ6によりエンジン1およびモータ/ジェネレータ5間を切り離し可能に結合する。
ここで第1クラッチ6は、伝達トルク容量を連続的または段階的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
モータ/ジェネレータ5および自動変速機3間に、より詳しくは、軸4と変速機入力軸3aとの間に第2クラッチ7を介挿し、この第2クラッチ7によりモータ/ジェネレータ5および自動変速機3間を切り離し可能に結合する。
第2クラッチ7も第1クラッチ6と同様、伝達トルク容量を連続的または段階的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
第2クラッチ7も第1クラッチ6と同様、伝達トルク容量を連続的または段階的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
自動変速機3は、2003年1月、日産自動車(株)発行「スカイライン新型車(CV35型車)解説書」第C−9頁〜第C−22頁に記載されたと同じものとし、複数の摩擦要素(クラッチやブレーキ等)を選択的に締結したり解放することで、これら摩擦要素の締結・解放組み合わせにより伝動系路(変速段)を決定するものとする。
従って自動変速機3は、入力軸3aからの回転を選択変速段に応じたギヤ比で変速して出力軸3bに出力する。
この出力回転は、ディファレンシャルギヤ装置8により左右後輪2へ分配して伝達され、車両の走行に供される。
但し自動変速機3は、上記したような有段式のものに限られず、無段変速機であってもよいのは言うまでもない。
従って自動変速機3は、入力軸3aからの回転を選択変速段に応じたギヤ比で変速して出力軸3bに出力する。
この出力回転は、ディファレンシャルギヤ装置8により左右後輪2へ分配して伝達され、車両の走行に供される。
但し自動変速機3は、上記したような有段式のものに限られず、無段変速機であってもよいのは言うまでもない。
上記した図1のパワートレーンにおいては、停車状態からの発進時などを含む低負荷・低車速時に用いられる電気走行(EV)モードが要求される場合、第1クラッチ6を解放し、第2クラッチ7を締結し、自動変速機3を動力伝達状態にする。
この状態でモータ/ジェネレータ5を駆動すると、当該モータ/ジェネレータ5からの出力回転のみが変速機入力軸3aに達することとなり、自動変速機3が当該入力軸3aへの回転を、選択中の変速段に応じ変速して変速機出力軸3bより出力する。
変速機出力軸3bからの回転はその後、ディファレンシャルギヤ装置8を経て後輪2に至り、車両をモータ/ジェネレータ5のみによって電気走行(EV走行)させることができる。
変速機出力軸3bからの回転はその後、ディファレンシャルギヤ装置8を経て後輪2に至り、車両をモータ/ジェネレータ5のみによって電気走行(EV走行)させることができる。
高速走行時や大負荷走行時などで用いられるハイブリッド走行(HEV走行)モードが要求される場合、第1クラッチ6および第2クラッチ7をともに締結し、自動変速機3を動力伝達状態にする。
この状態では、エンジン1からの出力回転、または、エンジン1からの出力回転およびモータ/ジェネレータ5からの出力回転の双方が変速機入力軸3aに達することとなり、自動変速機3が当該入力軸3aへの回転を、選択中の変速段に応じ変速して、変速機出力軸3bより出力する。
変速機出力軸3bからの回転はその後、ディファレンシャルギヤ装置8を経て後輪2に至り、車両をエンジン1およびモータ/ジェネレータ5の双方によってハイブリッド走行(HEV走行)させることができる。
この状態では、エンジン1からの出力回転、または、エンジン1からの出力回転およびモータ/ジェネレータ5からの出力回転の双方が変速機入力軸3aに達することとなり、自動変速機3が当該入力軸3aへの回転を、選択中の変速段に応じ変速して、変速機出力軸3bより出力する。
変速機出力軸3bからの回転はその後、ディファレンシャルギヤ装置8を経て後輪2に至り、車両をエンジン1およびモータ/ジェネレータ5の双方によってハイブリッド走行(HEV走行)させることができる。
かかるHEV走行中において、エンジン1を最適燃費で運転させるとエネルギーが余剰となる場合、この余剰エネルギーによりモータ/ジェネレータ5を発電機として作動させることで余剰エネルギーを電力に変換し、この発電電力をモータ/ジェネレータ5のモータ駆動に用いるよう蓄電しておくことでエンジン1の燃費を向上させることができる。
なお図1では、モータ/ジェネレータ5および駆動車輪2を切り離し可能に結合する第1クラッチ7を、モータ/ジェネレータ5および自動変速機3間に介在させたが、
図2に示すように、第2クラッチ7を自動変速機3およびディファレンシャルギヤ装置8間に介在させても、同様に機能させることができる。
図2に示すように、第2クラッチ7を自動変速機3およびディファレンシャルギヤ装置8間に介在させても、同様に機能させることができる。
また、図1および図2では第2クラッチ7として専用のものを自動変速機3の前、若しくは、後に追加することとしたが、
この代わりに第2クラッチ7として、図3に示すごとく自動変速機3内に既存する前進変速段選択用の摩擦要素または後退変速段選択用の摩擦要素を流用するようにしてもよい。
この場合、第2クラッチ7が前記したモード選択機能を果たすのに加えて、この機能を果たすよう締結される時に自動変速機を動力伝達状態にすることとなり、専用の第2クラッチが不要でコスト上大いに有利である。
この代わりに第2クラッチ7として、図3に示すごとく自動変速機3内に既存する前進変速段選択用の摩擦要素または後退変速段選択用の摩擦要素を流用するようにしてもよい。
この場合、第2クラッチ7が前記したモード選択機能を果たすのに加えて、この機能を果たすよう締結される時に自動変速機を動力伝達状態にすることとなり、専用の第2クラッチが不要でコスト上大いに有利である。
図1〜3に示すハイブリッド車両のパワートレーンを成すエンジン1、モータ/ジェネレータ5、第1クラッチ6、および第2クラッチ7は、図4に示すようなシステムにより制御する。
図4の制御システムは、パワートレーンの動作点を統合制御する統合コントローラ20を具え、パワートレーンの動作点を、目標エンジントルクtTeと、目標モータ/ジェネレータトルクtTm(目標モータ/ジェネレータ回転数tNmでもよい)と、第1クラッチ6の目標伝達トルク容量tTc1と、第2クラッチ7の目標伝達トルク容量tTc2とで規定する。
統合コントローラ20には、上記パワートレーンの動作点を決定するために、
エンジン回転数Neを検出するエンジン回転センサ11からの信号と、
モータ/ジェネレータ回転数Nmを検出するモータ/ジェネレータ回転センサ12からの信号と、
変速機入力回転数Niを検出する入力回転センサ13からの信号と、
変速機出力回転数Noを検出する出力回転センサ14からの信号と、
エンジン1の要求負荷状態を表すアクセルペダル踏み込み量(アクセル開度APO)を検出するアクセル開度センサ15からの信号と、
モータ/ジェネレータ5用の電力を蓄電しておくバッテリ9の蓄電状態SOC(持ち出し可能電力)を検出する蓄電状態センサ16からの信号とを入力する。
エンジン回転数Neを検出するエンジン回転センサ11からの信号と、
モータ/ジェネレータ回転数Nmを検出するモータ/ジェネレータ回転センサ12からの信号と、
変速機入力回転数Niを検出する入力回転センサ13からの信号と、
変速機出力回転数Noを検出する出力回転センサ14からの信号と、
エンジン1の要求負荷状態を表すアクセルペダル踏み込み量(アクセル開度APO)を検出するアクセル開度センサ15からの信号と、
モータ/ジェネレータ5用の電力を蓄電しておくバッテリ9の蓄電状態SOC(持ち出し可能電力)を検出する蓄電状態センサ16からの信号とを入力する。
なお、上記したセンサのうち、エンジン回転センサ11、モータ/ジェネレータ回転センサ12、入力回転センサ13、および出力回転センサ14はそれぞれ、図1〜3に示すように配置することができる。
統合コントローラ20は、上記入力情報のうちアクセル開度APO、バッテリ蓄電状態SOC、および変速機出力回転数No(車速VSP)から、運転者が希望している車両の駆動力を実現可能な運転モード(EVモード、HEVモード)を選択すると共に、目標エンジントルクtTe、目標モータ/ジェネレータトルクtTm(目標モータ/ジェネレータ回転数tNmでもよい)、目標第1クラッチ伝達トルク容量tTc1、および目標第2クラッチ伝達トルク容量tTc2をそれぞれ演算する。
目標エンジントルクtTeはエンジンコントローラ21に供給され、目標モータ/ジェネレータトルクtTm(目標モータ/ジェネレータ回転数tNmでもよい)はモータ/ジェネレータコントローラ22に供給される。
目標エンジントルクtTeはエンジンコントローラ21に供給され、目標モータ/ジェネレータトルクtTm(目標モータ/ジェネレータ回転数tNmでもよい)はモータ/ジェネレータコントローラ22に供給される。
エンジンコントローラ21は、エンジントルクTeが目標エンジントルクtTeとなるようエンジン1を制御し、
モータ/ジェネレータコントローラ22はモータ/ジェネレータ5のトルクTm(または回転数Nm)が目標モータ/ジェネレータトルクtTm(または目標モータ/ジェネレータ回転数tNm)となるよう、バッテリ9およびインバータ10を介してモータ/ジェネレータ5を制御する。
統合コントローラ20は、目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2に対応したソレノイド電流を第1クラッチ6および第2クラッチ7の締結制御ソレノイド(図示せず)に供給し、第1クラッチ6の伝達トルク容量Tc1が目標伝達トルク容量tTc1に一致するよう、また、第2クラッチ7の伝達トルク容量Tc2が目標第2クラッチ伝達トルク容量tTc2に一致するよう、第1クラッチ6および第2クラッチ7を個々に締結力制御する。
モータ/ジェネレータコントローラ22はモータ/ジェネレータ5のトルクTm(または回転数Nm)が目標モータ/ジェネレータトルクtTm(または目標モータ/ジェネレータ回転数tNm)となるよう、バッテリ9およびインバータ10を介してモータ/ジェネレータ5を制御する。
統合コントローラ20は、目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2に対応したソレノイド電流を第1クラッチ6および第2クラッチ7の締結制御ソレノイド(図示せず)に供給し、第1クラッチ6の伝達トルク容量Tc1が目標伝達トルク容量tTc1に一致するよう、また、第2クラッチ7の伝達トルク容量Tc2が目標第2クラッチ伝達トルク容量tTc2に一致するよう、第1クラッチ6および第2クラッチ7を個々に締結力制御する。
統合コントローラ20は、上記した運転モード(EVモード、HEVモード)の選択、そして目標エンジントルクtTe、目標モータ/ジェネレータトルクtTm(目標モータ/ジェネレータ回転数tNmでもよい)、目標第1クラッチ伝達トルク容量tTc1、および目標第2クラッチ伝達トルク容量tTc2の演算を、図5に示すメインルーチンにより実行する。
先ずステップS1において、予定の到達目標駆動力マップを用いて、アクセル開度APOおよび車速VSPから、定常的な到達目標駆動力tFo0を演算する。
次のステップS2においては、予定の変速マップをもとにアクセル開度APOおよび車速VSPから目標変速段SHIFTを決定し、これをステップS9で自動変速機3の変速制御部(図示せず)へ指令して自動変速機3を目標変速段SHIFTへと変速させる。
次のステップS2においては、予定の変速マップをもとにアクセル開度APOおよび車速VSPから目標変速段SHIFTを決定し、これをステップS9で自動変速機3の変速制御部(図示せず)へ指令して自動変速機3を目標変速段SHIFTへと変速させる。
ステップS3においては、予定の目標運転モード(EVモード、HEVモード)領域マップを用いて、アクセル開度APOおよび車速VSPから目標とする運転モードを決定する。
目標運転モードとして通常、高負荷(大アクセル開度)・高車速時はHEVモードをあてがい、低負荷・低車速時はEVモードをあてがうように上記の目標運転モード領域マップを定めるのが普通である。
目標運転モードとして通常、高負荷(大アクセル開度)・高車速時はHEVモードをあてがい、低負荷・低車速時はEVモードをあてがうように上記の目標運転モード領域マップを定めるのが普通である。
次のステップS4においては、現在の運転モードと上記目標運転モードとの対比により、運転モード遷移演算を以下のごとくに行う。
現在の運転モードと目標運転モードとが一致していれば、現在の運転モードEVモードまたはHEVモードを保持するよう指令し、
現在の運転モードがEVモードで、目標運転モードがHEVモードであれば、EVモードからHEVモードへのモード切り換えを指令し、
現在の運転モードがHEVモードで、目標運転モードがEVモードであれば、HEVモードからEVモードへのモード切り換えを指令する。
そして、これらの指令をステップS9で出力することにより、指令通りにモード保持や、モード切り換えを行わせる。
現在の運転モードと目標運転モードとが一致していれば、現在の運転モードEVモードまたはHEVモードを保持するよう指令し、
現在の運転モードがEVモードで、目標運転モードがHEVモードであれば、EVモードからHEVモードへのモード切り換えを指令し、
現在の運転モードがHEVモードで、目標運転モードがEVモードであれば、HEVモードからEVモードへのモード切り換えを指令する。
そして、これらの指令をステップS9で出力することにより、指令通りにモード保持や、モード切り換えを行わせる。
ステップS5においては、現在の駆動力からステップS1で求めた到達目標駆動力tFo0へ所定の味付けをもった応答で移行するのに必要な時々刻々の過渡目標駆動力tFoを演算する。
この演算に当たっては例えば、到達目標駆動力tFo0を所定時定数のローパスフィルタに通過させて得られる出力を過渡目標駆動力tFoとすることができる。
この演算に当たっては例えば、到達目標駆動力tFo0を所定時定数のローパスフィルタに通過させて得られる出力を過渡目標駆動力tFoとすることができる。
ステップS6においては目標エンジントルクtTeを以下のようにして求める。
HEVモードであれば、先ず、過渡目標駆動力tFoを得るのに必要な自動変速機3の目標入力トルクtTiを次式の演算により求める。
tTi=tFo×Rt/if/iG ・・・(1)
ここで、Rtは駆動車輪2のタイヤ有効半径、ifはファイナルギヤ比、iGは現在の選択変速段により決まる自動変速機3のギヤ比である。
次いで、この目標入力トルクtTiと、自動変速機3の入力回転数Niと、エンジン回転数Neと、バッテリ蓄電状態SOC(持ち出し可能電力)に応じた目標充放電電力tPとから、次式を用いて目標エンジントルクtTeを演算する。
tTe=(tTi× Ni−tP)/Ne ・・・(2)
なお、EVモードであればエンジントルクが不要であるから、目標エンジントルクtTeはゼロにする。
上記のように決定した目標エンジントルクtTeはステップS9において、図4のエンジンコントローラ21に指令し、エンジンコントローラ21はエンジン1を目標エンジントルクtTeが実現されるよう制御する。
HEVモードであれば、先ず、過渡目標駆動力tFoを得るのに必要な自動変速機3の目標入力トルクtTiを次式の演算により求める。
tTi=tFo×Rt/if/iG ・・・(1)
ここで、Rtは駆動車輪2のタイヤ有効半径、ifはファイナルギヤ比、iGは現在の選択変速段により決まる自動変速機3のギヤ比である。
次いで、この目標入力トルクtTiと、自動変速機3の入力回転数Niと、エンジン回転数Neと、バッテリ蓄電状態SOC(持ち出し可能電力)に応じた目標充放電電力tPとから、次式を用いて目標エンジントルクtTeを演算する。
tTe=(tTi× Ni−tP)/Ne ・・・(2)
なお、EVモードであればエンジントルクが不要であるから、目標エンジントルクtTeはゼロにする。
上記のように決定した目標エンジントルクtTeはステップS9において、図4のエンジンコントローラ21に指令し、エンジンコントローラ21はエンジン1を目標エンジントルクtTeが実現されるよう制御する。
ステップS7においては、第1クラッチ6および第2クラッチ7の目標伝達トルク容量tTc1,tTc2を、図6〜10の制御プログラムを実行して求める。
先ず、図6のステップS11において、図5のステップS3で求めた目標運転モードがHEVモードか否(EVモード)かを判定し、その後、この判定結果がいずれであっても、ステップS12およびステップS13で現在の運転モードがHEVモードか否(EVモード)かをチェックする。
先ず、図6のステップS11において、図5のステップS3で求めた目標運転モードがHEVモードか否(EVモード)かを判定し、その後、この判定結果がいずれであっても、ステップS12およびステップS13で現在の運転モードがHEVモードか否(EVモード)かをチェックする。
ステップS11で目標運転モードがHEVモードと判定し、ステップS12で現在の運転モードもHEVモードと判定する場合、つまり、HEVモードを保つべきである場合は、ステップS14において、第1クラッチ6および第2クラッチ7の目標伝達トルク容量tTc1,tTc2をHEVモード用の目標値に設定し、
これらを図5のステップS9において、図4に示すごとく第1クラッチ6および第2クラッチ7に指令することで、これらクラッチ6,7をそれぞれ、目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2が実現されるよう締結制御する。
これらを図5のステップS9において、図4に示すごとく第1クラッチ6および第2クラッチ7に指令することで、これらクラッチ6,7をそれぞれ、目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2が実現されるよう締結制御する。
ここで特に、本発明の要旨に係わるHEVモード用の目標第2クラッチ伝達トルク容量tTc2の求め方を、図7に基づき以下に詳述する。
先ずステップS21において、車両過渡応答分伝達トルク容量を、前記(1)式で求めた目標入力軸トルクtTiと、車両過渡応答用安全率との乗算により求める。
次のステップS22においては、エンジントルク分担分の伝達トルク容量を、前記(2)式で求めた目標エンジントルクtTeと、エンジン用の安全率(例えば1.3)との乗算により求める。
先ずステップS21において、車両過渡応答分伝達トルク容量を、前記(1)式で求めた目標入力軸トルクtTiと、車両過渡応答用安全率との乗算により求める。
次のステップS22においては、エンジントルク分担分の伝達トルク容量を、前記(2)式で求めた目標エンジントルクtTeと、エンジン用の安全率(例えば1.3)との乗算により求める。
更にステップS23において、モータ/ジェネレータトルク分担分の伝達トルク容量を、図12につき後述するように求める目標モータ/ジェネレータトルクtTmと、モータ/ジェネレータ用の安全率(例えば1.0)との乗算により求める。
次いでステップS24において、クラッチ応答分伝達トルク容量を、前記(1)式で求めた目標入力軸トルクtTiと、クラッチ応答用安全率との乗算により求める。
次いでステップS24において、クラッチ応答分伝達トルク容量を、前記(1)式で求めた目標入力軸トルクtTiと、クラッチ応答用安全率との乗算により求める。
更にステップS25において、イナーシャトルク分伝達トルク容量を以下の演算により求める。つまり、先ずモータ/ジェネレータ回転数Nmの今回値から前回値を差し引いて、1演算周期中におけるモータ/ジェネレータ回転数変化量を求める。次いで、エンジンの回転イナーシャと、第1クラッチ6の回転イナーシャと、モータ/ジェネレータ5の回転イナーシャとを合算して合計イナーシャを求める。最後に、モータ/ジェネレータ回転数変化量と、合計イナーシャとの乗算値を、演算周期により除算してイナーシャトルク分伝達トルク容量を算出する。
ステップS26においては、ステップS21で求めた車両過渡応答分伝達トルク容量と、ステップS22で求めたエンジントルク分担分の伝達トルク容量と、ステップS23で求めたモータ/ジェネレータトルク分担分の伝達トルク容量と、ステップS24で求めたクラッチ応答分伝達トルク容量と、ステップS25で求めたイナーシャトルク分伝達トルク容量とを合算してHEVモードでの目標第2クラッチ伝達トルク容量tTc2とする。
図6のステップS11で目標運転モードがHEVモードと判定し、ステップS12で現在の運転モードがEVモードと判定する場合、つまり、EVモードからHEVモードへモード切り換えする場合は、ステップS15においてバッテリ蓄電状態SOC(持ち出し可能電力)がEV可能駆動力とエンジン始動電力との和値よりも小さいか否かを、つまり、バッテリ蓄電状態SOC(持ち出し可能電力)が不足するような大駆動力要求中か否かを判定する。
バッテリ蓄電状態SOC(持ち出し可能電力)が不足するような大駆動力要求中である場合は、ステップS16において、第1および第2クラッチ6,7の目標クラッチ伝達トルク容量tTc1,tTc2をそれぞれ大駆動力中エンジン始動時目標クラッチ伝達トルク容量となす。
バッテリ蓄電状態SOC(持ち出し可能電力)が不足するような大駆動力要求中である場合は、ステップS16において、第1および第2クラッチ6,7の目標クラッチ伝達トルク容量tTc1,tTc2をそれぞれ大駆動力中エンジン始動時目標クラッチ伝達トルク容量となす。
これら大駆動力中エンジン始動時目標クラッチ伝達トルク容量は、図8に示す制御プログラムを実行して以下のように求める。
先ずステップS31において、第2クラッチ7の前後差回転であるスリップ回転=(Nm−Ni)がスリップ判定回転数以下か否かにより第2クラッチ7が締結状態かスリップ状態かを判定する。
第2クラッチ7が締結状態ならその伝達トルク容量が現在のままでよいため、ステップS32において、目標第2クラッチ伝達トルク容量tTc2を前回値に保持すべく、tTc2にtTc2(前回値)を代入する。
先ずステップS31において、第2クラッチ7の前後差回転であるスリップ回転=(Nm−Ni)がスリップ判定回転数以下か否かにより第2クラッチ7が締結状態かスリップ状態かを判定する。
第2クラッチ7が締結状態ならその伝達トルク容量が現在のままでよいため、ステップS32において、目標第2クラッチ伝達トルク容量tTc2を前回値に保持すべく、tTc2にtTc2(前回値)を代入する。
次のステップS33において、第1クラッチ6の前後差回転であるスリップ回転=(Nm−Ne)が0を越えているか否かにより、第1クラッチ6がスリップ状態か締結状態かをチェックする。
第1クラッチ6がスリップ状態ならステップS34において、目標第1クラッチ伝達トルク容量tTc1に0をセットし、第1クラッチ6が締結状態ならステップS35において、目標第1クラッチ伝達トルク容量tTc1に最大伝達トルク容量をセットする。
以上のようにしてEV→HEVモード切り替え時用の目標第2クラッチ伝達トルク容量tTc2および目標第1クラッチ伝達トルク容量tTc1を決定した後は、ステップS36において当該決定した今回の目標第2クラッチ伝達トルク容量tTc2および目標第1クラッチ伝達トルク容量tTc1をそれぞれtTc2(前回値)およびtTc1(前回値)に代入し、次回の演算に用いる。
第1クラッチ6がスリップ状態ならステップS34において、目標第1クラッチ伝達トルク容量tTc1に0をセットし、第1クラッチ6が締結状態ならステップS35において、目標第1クラッチ伝達トルク容量tTc1に最大伝達トルク容量をセットする。
以上のようにしてEV→HEVモード切り替え時用の目標第2クラッチ伝達トルク容量tTc2および目標第1クラッチ伝達トルク容量tTc1を決定した後は、ステップS36において当該決定した今回の目標第2クラッチ伝達トルク容量tTc2および目標第1クラッチ伝達トルク容量tTc1をそれぞれtTc2(前回値)およびtTc1(前回値)に代入し、次回の演算に用いる。
ステップS31で第2クラッチ7がスリップ状態であると判定する場合は、ステップS37において、第1クラッチ6のスリップ回転=(Nm−Ne)がスリップ判定回転数以下か否かにより、エンジン始動後かエンジン始動前かをチェックする。
エンジン始動後であればステップS38において、目標第2クラッチ伝達トルク容量tTc2に、図7につき前述したようにして求めるHEVモード用の伝達トルク容量をセットし、エンジン始動前であればステップS39において、目標第2クラッチ伝達トルク容量tTc2に、図10に基づき後述するようにして求めるEVモード用の伝達トルク容量をセットする。
エンジン始動後であればステップS38において、目標第2クラッチ伝達トルク容量tTc2に、図7につき前述したようにして求めるHEVモード用の伝達トルク容量をセットし、エンジン始動前であればステップS39において、目標第2クラッチ伝達トルク容量tTc2に、図10に基づき後述するようにして求めるEVモード用の伝達トルク容量をセットする。
ステップS37でエンジン始動後と判定し、ステップS38で目標第2クラッチ伝達トルク容量tTc2にHEVモード用の伝達トルク容量をセットした後は、
ステップS40において、目標第1クラッチ伝達トルク容量tTc1の基本値tTc1(基本値)を演算し、
ステップS41において、目標第1クラッチ伝達トルク容量tTc1の制限値tTc1(制限値)に、目標第1クラッチ伝達トルク容量tTc1の前回値tTc1(前回値)と、変化制限幅との和値をセットする。
ステップS40において、目標第1クラッチ伝達トルク容量tTc1の基本値tTc1(基本値)を演算し、
ステップS41において、目標第1クラッチ伝達トルク容量tTc1の制限値tTc1(制限値)に、目標第1クラッチ伝達トルク容量tTc1の前回値tTc1(前回値)と、変化制限幅との和値をセットする。
次のステップS42においては、tTc1(制限値)がtTc1(基本値)未満か否かをチェックし、未満であればステップS43において、目標第1クラッチ伝達トルク容量tTc1をtTc1=tTc1(前回値)+変化制限幅により求める。
ステップS37でエンジン始動前と判定し、ステップS39で目標第2クラッチ伝達トルク容量tTc2にEVモード用の伝達トルク容量をセットした後や、ステップS42でtTc1(制限値)がtTc1(基本値)以上と判定する場合、ステップS44において、目標第1クラッチ伝達トルク容量tTc1にtTc1(基本値)をセットする。
以上のようにしてEV→HEVモード切り替え時用の目標第2クラッチ伝達トルク容量tTc2および目標第1クラッチ伝達トルク容量tTc1を決定した後は、ステップS36において当該決定した今回の目標第2クラッチ伝達トルク容量tTc2および目標第1クラッチ伝達トルク容量tTc1をそれぞれtTc2(前回値)およびtTc1(前回値)に代入し、次回の演算に用いる。
図6のステップS15でバッテリ蓄電状態SOC(持ち出し可能電力)が足りるような小駆動力要求中であると判定する場合は、ステップS17において、第1および第2クラッチ6,7の目標クラッチ伝達トルク容量tTc1,tTc2を小駆動力中エンジン始動時目標クラッチ伝達トルク容量となす。
なお小駆動力要求中は、モータ/ジェネレータ5がモータとしてでなく、エンジンからの余剰動力で発電を行うジェネレータとして機能しているため、モータ/ジェネレータ5のトルク分担分についても、ステップS16(図8のステップS38、従って図7)におけるように小さなモータ/ジェネレータ用の安全率を用いて第2クラッチ7の伝達トルク容量tTc2を決定することができず、従来通り大きなエンジン用の安全率を用いて第2クラッチ7の伝達トルク容量tTc2を決定することとする。
なお小駆動力要求中は、モータ/ジェネレータ5がモータとしてでなく、エンジンからの余剰動力で発電を行うジェネレータとして機能しているため、モータ/ジェネレータ5のトルク分担分についても、ステップS16(図8のステップS38、従って図7)におけるように小さなモータ/ジェネレータ用の安全率を用いて第2クラッチ7の伝達トルク容量tTc2を決定することができず、従来通り大きなエンジン用の安全率を用いて第2クラッチ7の伝達トルク容量tTc2を決定することとする。
以上のようにステップS16(詳しくは図8)およびステップS17で決定した目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc1を図5のステップS9において、図4に示すごとく第1クラッチ6および第2クラッチ7に指令することで、これらクラッチ6,7をそれぞれ、目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2が実現されるよう締結制御する。
図6のステップS11で目標運転モードがEVモードと判定し、ステップS13で現在の運転モードがHEVモードと判定する場合、つまり、HEVモードからEVモードへ運転モードを切り換える場合は、ステップS18において、第1クラッチ6および第2クラッチ7の目標伝達トルク容量tTc1,tTc2をEVモードへの移行時用の目標値に設定する。
ここで特に、本発明の要旨に係わるHEV→EVモード切り替え時の目標第2クラッチ伝達トルク容量tTc2の求め方を図9に基づき詳述する。
ここで特に、本発明の要旨に係わるHEV→EVモード切り替え時の目標第2クラッチ伝達トルク容量tTc2の求め方を図9に基づき詳述する。
ステップS51においては、第1クラッチ6の実伝達トルク容量Tc1が、HEV→EVモード切り替えの未完を判定するための設定値以上か否かにより、このモード切り替えが未だか否かをチェックする。
ステップS51で第1クラッチ6の実伝達トルク容量Tc1が設定値以上である間は、HEV→EVモード切り替えが未だ完了していないから制御をステップS52に進め、ここで、目標第2クラッチ伝達トルク容量tTc2に、図7につき前述したようにして求めるHEVモード用の伝達トルク容量をセットする。
ステップS51で第1クラッチ6の実伝達トルク容量Tc1が設定値未満になったら、HEV→EVモード切り替えが完了しているとして制御をステップS53に進め、ここで、目標第2クラッチ伝達トルク容量tTc2に、図10に基づき後述するようにして求めるEVモード用の伝達トルク容量をセットする。
ステップS51で第1クラッチ6の実伝達トルク容量Tc1が設定値以上である間は、HEV→EVモード切り替えが未だ完了していないから制御をステップS52に進め、ここで、目標第2クラッチ伝達トルク容量tTc2に、図7につき前述したようにして求めるHEVモード用の伝達トルク容量をセットする。
ステップS51で第1クラッチ6の実伝達トルク容量Tc1が設定値未満になったら、HEV→EVモード切り替えが完了しているとして制御をステップS53に進め、ここで、目標第2クラッチ伝達トルク容量tTc2に、図10に基づき後述するようにして求めるEVモード用の伝達トルク容量をセットする。
図6のステップS11で目標運転モードがEVモードと判定し、ステップS13で現在の運転モードもEVモードと判定する場合、つまり、EVモードを保つべきである場合は、ステップS19において、第2クラッチ7の目標伝達トルク容量tTc2をEVモード用の目標値に設定し、第1クラッチ6の目標伝達トルク容量tTc1をEVモード用に0に設定する。
かかるEVモード用の目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2は、図10に示す制御プログラムにより以下のように求める。
かかるEVモード用の目標第1クラッチ伝達トルク容量tTc1および目標第2クラッチ伝達トルク容量tTc2は、図10に示す制御プログラムにより以下のように求める。
先ずステップS61において、第2クラッチ7のスリップ回転=(Nm−Ni)がスリップ判定回転数以下か否かにより、第2クラッチ7が今は締結状態かスリップ状態かを判定する。
この判定結果がいずれであっても、ステップS62およびステップS63において、前回の第2クラッチ7のスリップ判定がスリップ状態であったか否かをチェックする。
この判定結果がいずれであっても、ステップS62およびステップS63において、前回の第2クラッチ7のスリップ判定がスリップ状態であったか否かをチェックする。
ステップS61で今回第2クラッチ7が締結状態と判定し、ステップS62で前回第2クラッチ7がスリップ状態と判定する場合は、つまり第2クラッチ7がスリップ状態から締結状態に変化した場合は、
第2クラッチ7がスリップしないぎりぎりの伝達トルク容量、つまり、伝達すべき駆動力に対応するトルク容量になった直後であることから、
ステップS64において第2クラッチのトルク容量補正量基本値を前回補正量の半分とし、ステップS65において伝達トルク容量補正量ΔtTc2を前回補正量−上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後にステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
第2クラッチ7がスリップしないぎりぎりの伝達トルク容量、つまり、伝達すべき駆動力に対応するトルク容量になった直後であることから、
ステップS64において第2クラッチのトルク容量補正量基本値を前回補正量の半分とし、ステップS65において伝達トルク容量補正量ΔtTc2を前回補正量−上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後にステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
ステップS61で今回第2クラッチ7が締結状態と判定し、ステップS62で前回第2クラッチ7がスリップ状態でないと判定する場合は、つまり第2クラッチ7が前回も今回も締結状態を保つ場合は、ステップS67において、更に一回前の前々回に第2クラッチ7がスリップ状態だったか否かをチェックする。
ステップS67で前々回に第2クラッチ7がスリップ状態でなかったと判定する場合、つまり、第2クラッチ7が前々回、前回、今回と続けて締結状態であった場合は、第2クラッチ7の伝達トルク容量が、伝達すべき駆動力に対して容量過大であることから、
ステップS68において第2クラッチのトルク容量補正量基本値を前回補正量の2倍とし、ステップS65において伝達トルク容量補正量ΔtTc2を前回補正量−上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後にステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
ステップS67で前々回に第2クラッチ7がスリップ状態でなかったと判定する場合、つまり、第2クラッチ7が前々回、前回、今回と続けて締結状態であった場合は、第2クラッチ7の伝達トルク容量が、伝達すべき駆動力に対して容量過大であることから、
ステップS68において第2クラッチのトルク容量補正量基本値を前回補正量の2倍とし、ステップS65において伝達トルク容量補正量ΔtTc2を前回補正量−上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後にステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
しかし、ステップS67で前々回第2クラッチ7がスリップ状態であったと判定する場合、つまり、第2クラッチ7が前々回スリップ状態であったが、前回、今回と2回続けて締結状態であった場合は、第2クラッチ7の伝達トルク容量が、伝達すべき駆動力に対して若干大きめであることから、
ステップS64やステップS68におけるような第2クラッチのトルク容量補正量基本値の修正を行わずに制御をステップS65に進め、ここで、伝達トルク容量補正量ΔtTc2を前回補正量−上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後のステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
ステップS64やステップS68におけるような第2クラッチのトルク容量補正量基本値の修正を行わずに制御をステップS65に進め、ここで、伝達トルク容量補正量ΔtTc2を前回補正量−上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後のステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
ステップS61で今回第2クラッチ7がスリップ状態と判定し、ステップS63で前回第2クラッチ7がスリップ状態と判定する場合は、つまり第2クラッチ7が2回続けてスリップ状態を維持する場合は、
第2クラッチ7が、伝達すべき駆動力に対して大きく不足していることから、
ステップS69において第2クラッチのトルク容量補正量基本値を前回補正量の2倍とし、ステップS70において伝達トルク容量補正量ΔtTc2を前回補正量+上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後のステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
第2クラッチ7が、伝達すべき駆動力に対して大きく不足していることから、
ステップS69において第2クラッチのトルク容量補正量基本値を前回補正量の2倍とし、ステップS70において伝達トルク容量補正量ΔtTc2を前回補正量+上記トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後のステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
しかし、ステップS61で今回第2クラッチ7がスリップ状態と判定し、ステップS63で前回第2クラッチ7がスリップ状態でないと判定する場合は、つまり第2クラッチ7が締結状態からスリップ状態になった場合は、
第2クラッチ7が、伝達すべき駆動力に対して若干不足している程度であることから、
ステップS69におけるようなトルク容量補正量基本値の修正を行わずにステップS70において伝達トルク容量補正量ΔtTc2を前回補正量+トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後のステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
第2クラッチ7が、伝達すべき駆動力に対して若干不足している程度であることから、
ステップS69におけるようなトルク容量補正量基本値の修正を行わずにステップS70において伝達トルク容量補正量ΔtTc2を前回補正量+トルク容量補正量基本値により求め、次のステップS66において第2クラッチ7の目標伝達トルク容量tTc2を駆動力tFoに対応した伝達トルク容量と上記伝達トルク容量補正量ΔtTc2との和値とし、最後のステップS71において第1クラッチ6の目標伝達トルク容量tTc1に0をセットする。
図6のステップS19で、図10におけるようにして求めた第1クラッチ6の目標伝達トルク容量tTc1および第2クラッチ7の目標伝達トルク容量tTc2を図5のステップS9において、図4に示すごとく第2クラッチ7に指令することで、これらクラッチ6,7を目標クラッチ伝達トルク容量tTc1,tTc2が実現されるよう締結制御する。
図5のステップS7で前記したごとくに目標第1および第2クラッチ伝達トルク容量tTc1,tTc2を定めた後のステップS8においては、目標モータ/ジェネレータトルクtTmを図11〜図14に示す制御プログラムにより求める。
先ず、図11のステップS81において、図5のステップS3で求めた目標運転モードがHEVモードか否(EVモード)かを判定し、その後、この判定結果がいずれであっても、ステップS82およびステップS83で現在の運転モードがHEVモードか否(EVモード)かをチェックする。
先ず、図11のステップS81において、図5のステップS3で求めた目標運転モードがHEVモードか否(EVモード)かを判定し、その後、この判定結果がいずれであっても、ステップS82およびステップS83で現在の運転モードがHEVモードか否(EVモード)かをチェックする。
ステップS81で目標運転モードがHEVモードと判定し、ステップS82で現在の運転モードもHEVモードと判定する場合、つまり、HEVモードを保つべきである場合は、ステップS84において、モータ/ジェネレータ5の目標トルクtTmをHEVモード用の目標値に設定する。
このHEVモード用目標モータ/ジェネレータトルクtTmは、図12に示すようにして定めるもので、ステップS91において第2クラッチ7のスリップ回転ΔNcが設定回転数ΔNc1以上か否かをチェックする。
このHEVモード用目標モータ/ジェネレータトルクtTmは、図12に示すようにして定めるもので、ステップS91において第2クラッチ7のスリップ回転ΔNcが設定回転数ΔNc1以上か否かをチェックする。
ここで設定スリップ回転ΔNc1について説明するに、全てのクラッチがそうであるように第2クラッチのスリップ回転ΔNc=Nm−Niに対するクラッチ摩擦係数μの変化特性は通常、摩擦係数μが最大となるスリップ回転を挟んで前後の或るスリップ回転範囲は、スリップ回転に対するクラッチ摩擦係数μの変化割合が比較的大きい摩擦係数不安定域であり、これを越えた、上記設定スリップ回転ΔNc1以上の大スリップ回転範囲は、スリップ回転に対するクラッチ摩擦係数μの変化割合が比較的小さな摩擦係数安定域である。
ΔNc<ΔNc1の摩擦係数不安定域で第2クラッチ7のスリップ回転が目標値になるようモータ/ジェネレータトルクtTmをフィードバック制御すると、トルクの僅かな変化で第2クラッチ7の摩擦係数が大きく変化して第2クラッチ7の伝達トルク容量も大きく変化し、クラッチジャダーを生ずることから、上記のフィードバック制御はΔNc≧ΔNc1の摩擦係数安定域で行うのがよく、ΔNc<ΔNc1の摩擦係数不安定域ではフィードフォワード制御が好ましい。
ΔNc<ΔNc1の摩擦係数不安定域で第2クラッチ7のスリップ回転が目標値になるようモータ/ジェネレータトルクtTmをフィードバック制御すると、トルクの僅かな変化で第2クラッチ7の摩擦係数が大きく変化して第2クラッチ7の伝達トルク容量も大きく変化し、クラッチジャダーを生ずることから、上記のフィードバック制御はΔNc≧ΔNc1の摩擦係数安定域で行うのがよく、ΔNc<ΔNc1の摩擦係数不安定域ではフィードフォワード制御が好ましい。
本実施例ではこの観点から、図12のステップS91において第2クラッチ7のスリップ回転ΔNcが設定回転数ΔNc1以上か否かにより、摩擦係数安定域であるのか、摩擦係数不安定域であるのかを判定する。
ステップS91でΔNc<ΔNc1の摩擦係数不安定域と判定する場合は、ステップS92において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分との和値とするフィードフォワード制御を行い、
ステップS91でΔNc≧ΔNc1の摩擦係数安定域と判定する場合は、ステップS93において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分と、第2クラッチスリップ制御分トルクとの和値とするフィードバック制御を行い、
かようにして求めた目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
ステップS91でΔNc<ΔNc1の摩擦係数不安定域と判定する場合は、ステップS92において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分との和値とするフィードフォワード制御を行い、
ステップS91でΔNc≧ΔNc1の摩擦係数安定域と判定する場合は、ステップS93において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分と、第2クラッチスリップ制御分トルクとの和値とするフィードバック制御を行い、
かようにして求めた目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
図11のステップS81で目標運転モードがHEVモードと判定し、ステップS82で現在の運転モードがEVモードと判定する場合、つまり、EVモードからHEVモードへモード切り換えする場合は、ステップS85において、モータ/ジェネレータ5の目標トルクtTmを、当該モード切り換えに際して必要なエンジン始動のための目標値に設定する。
このエンジン始動制御用目標モータ/ジェネレータトルクtTmは、図13に示すようにして定めるもので、先ずステップS94において、第2クラッチ7のスリップ回転ΔNcが設定回転数ΔNc1以上か否かにより、摩擦係数安定域であるのか、摩擦係数不安定域であるのかを判定する。
このエンジン始動制御用目標モータ/ジェネレータトルクtTmは、図13に示すようにして定めるもので、先ずステップS94において、第2クラッチ7のスリップ回転ΔNcが設定回転数ΔNc1以上か否かにより、摩擦係数安定域であるのか、摩擦係数不安定域であるのかを判定する。
ステップS94でΔNc<ΔNc1の摩擦係数不安定域と判定する場合はステップS95において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分との和値とするフィードフォワード制御を行う。
かようにして求めた目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
かようにして求めた目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
かかる摩擦係数不安定域でモータ/ジェネレータトルク制御による第2クラッチ7のスリップ回転フィードバック制御を行うと、フィードバック制御中のスリップ回転変化に対するクラッチ摩擦係数(トルク容量)変化が大きくて、駆動力が目標値tFoからずれたり、ショックを発生する懸念があるが、
本実施例では、摩擦係数不安定域でモータ/ジェネレータトルク制御による第2クラッチ7のスリップ回転フィードバック制御を行わないことにより、これらの問題を回避することができる。
そして、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分との和値とすることで、目標駆動力tFoを確実に達成し得ると共に、第1クラッチ6の締結進行によるエンジンのクランキングを所定とおりに行わせることができる。
本実施例では、摩擦係数不安定域でモータ/ジェネレータトルク制御による第2クラッチ7のスリップ回転フィードバック制御を行わないことにより、これらの問題を回避することができる。
そして、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分との和値とすることで、目標駆動力tFoを確実に達成し得ると共に、第1クラッチ6の締結進行によるエンジンのクランキングを所定とおりに行わせることができる。
ステップS94でΔNc≧ΔNc1の摩擦係数安定域と判定する場合は、ステップS96において、エンジン回転数Neが始動完了回転数以上か否かにより、エンジンが始動したか始動前かを判定する。
エンジン始動前であればステップS97において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分と、第2クラッチスリップ制御分トルクとの和値からエンジントルク推定値を差し引いた値とし、
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
エンジン始動前であればステップS97において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分と、第2クラッチスリップ制御分トルクとの和値からエンジントルク推定値を差し引いた値とし、
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
よって、第2クラッチ7のスリップ回転をモータ/ジェネレータトルク制御により目標値に保つスリップ回転フィードバック制御が行われる共に、エンジントルク分が車輪2へ余分に伝達されて駆動力が目標駆動力tFoを越えることのないようにし得る。
ここで第2クラッチ7のスリップ回転目標値は、前記の設定値ΔNc1以上であるが、車輪2への駆動力変動を許容範囲内のものにするのに必要な下限値とし、エンジン始動中におけるトルク変動や第1クラッチ6の締結ショックが車輪2へ伝達されるのを緩和し得るようになす。
なお本実施例では、第2クラッチ7のスリップ回転を目標値に保つのにモータ/ジェネレータトルク制御によりこれを実現することとしたが、この代わりに、第2クラッチの伝達トルク容量制御により目標スリップ回転を維持するようにしてもよいことは言うまでもない。
ここで第2クラッチ7のスリップ回転目標値は、前記の設定値ΔNc1以上であるが、車輪2への駆動力変動を許容範囲内のものにするのに必要な下限値とし、エンジン始動中におけるトルク変動や第1クラッチ6の締結ショックが車輪2へ伝達されるのを緩和し得るようになす。
なお本実施例では、第2クラッチ7のスリップ回転を目標値に保つのにモータ/ジェネレータトルク制御によりこれを実現することとしたが、この代わりに、第2クラッチの伝達トルク容量制御により目標スリップ回転を維持するようにしてもよいことは言うまでもない。
ステップS96でエンジン始動が完了したと判定する場合、ステップS98において、目標モータ/ジェネレータトルクtTmを駆動力tFo分と、第1クラッチ6の伝達トルク分と、第2クラッチスリップ制御分トルクとの和値とし、
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
図11のステップS81で目標運転モードがEVモードと判定し、ステップS83で現在の運転モードがHEVモードと判定する場合、つまり、HEVモードからEVモードへ運転モードを切り換える場合は、ステップS86において、モータ/ジェネレータ5の目標トルクtTmをEVモードへの移行時用の目標値に設定し、
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
ステップS81で目標運転モードがEVモードと判定し、ステップS83で現在の運転モードもEVモードと判定する場合、つまり、EVモードを保つべきである場合は、ステップS87において、目標モータ/ジェネレータトルクtTmをEVモード用の目標値に設定する。
かかるEVモード用の目標モータ/ジェネレータトルクtTmは、図14に示す制御プログラムにより求める。
つまりステップS99において、目標モータ/ジェネレータトルクtTmを駆動力tFoに相当する値とし、
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
かかるEVモード用の目標モータ/ジェネレータトルクtTmは、図14に示す制御プログラムにより求める。
つまりステップS99において、目標モータ/ジェネレータトルクtTmを駆動力tFoに相当する値とし、
この目標モータ/ジェネレータトルクtTmを、図5のステップS9で図4に示すごとくモータ/ジェネレータコントローラ22へ指令する。
上記した実施例になる第2クラッチ伝達トルク容量制御の作用効果を、HEVモードでの走行中にアクセル開度APOが図15に示すごとく瞬時t1に低下され、瞬時t2に再度増大された結果、図示のような要求駆動力tFo(実駆動力をFoで示した)の変化により、図示のような車速VSPの変化を伴いつつ、瞬時t1にHEVモードからEVモードへの切り替え要求が発生し、瞬時t3にEVモードからHEVモードへの切り替え要求が発生した場合のタイムチャートにより以下に説明する。
車輪駆動力の少なくとも一部としてモータ/ジェネレータ5からの動力を用いるHEVモード、HEV→EVモード切り替え時、EV→HEVモード切り替え時のうち、
HEVモードでは第2クラッチ7の伝達トルク容量tTc2が、図6のステップS14(詳しくは図7)において、モータ/ジェネレータ5のトルク分担分の伝達トルク容量をモータ/ジェネレータトルクとモータ/ジェネレータ用の安全率(例えば1.0)とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求められ、
またHEV→EVモード切り替え時は第2クラッチ7の伝達トルク容量tTc2が、図6のステップS18(詳しくは図9)において、モータ/ジェネレータ5のトルク分担分の伝達トルク容量をモータ/ジェネレータトルクとモータ/ジェネレータ用の安全率(例えば1.0)とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求められ、
EV→HEVモード切り替え時は第2クラッチ7の伝達トルク容量tTc2が、図6のステップS16(詳しくは図8)において、モータ/ジェネレータ5のトルク分担分の伝達トルク容量をモータ/ジェネレータトルクとモータ/ジェネレータ用の安全率(例えば1.0)とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求められるため、
モータ/ジェネレータ5のトルク分担分について第2クラッチの伝達トルク容量tTc2を求める時の安全率が適切で、モータ/ジェネレータ5のトルク分担分について第2クラッチ7の伝達トルク容量tTc2が過大になることがなく、このトルク容量の過大により生ずる燃費の悪化や動力性能の低下に関する問題を回避することができる。
HEVモードでは第2クラッチ7の伝達トルク容量tTc2が、図6のステップS14(詳しくは図7)において、モータ/ジェネレータ5のトルク分担分の伝達トルク容量をモータ/ジェネレータトルクとモータ/ジェネレータ用の安全率(例えば1.0)とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求められ、
またHEV→EVモード切り替え時は第2クラッチ7の伝達トルク容量tTc2が、図6のステップS18(詳しくは図9)において、モータ/ジェネレータ5のトルク分担分の伝達トルク容量をモータ/ジェネレータトルクとモータ/ジェネレータ用の安全率(例えば1.0)とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求められ、
EV→HEVモード切り替え時は第2クラッチ7の伝達トルク容量tTc2が、図6のステップS16(詳しくは図8)において、モータ/ジェネレータ5のトルク分担分の伝達トルク容量をモータ/ジェネレータトルクとモータ/ジェネレータ用の安全率(例えば1.0)とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求められるため、
モータ/ジェネレータ5のトルク分担分について第2クラッチの伝達トルク容量tTc2を求める時の安全率が適切で、モータ/ジェネレータ5のトルク分担分について第2クラッチ7の伝達トルク容量tTc2が過大になることがなく、このトルク容量の過大により生ずる燃費の悪化や動力性能の低下に関する問題を回避することができる。
なお、モータ/ジェネレータ5からの動力のみにより走行するEVモードでは、第2クラッチ7の伝達トルク容量tTc2を、図6のステップS19(詳しくは図10)において、以下のようにして決定するため、
つまり、第2クラッチ7のスリップを検出し、該スリップの検出まで第2クラッチの伝達トルク容量を低下させ、該スリップの検出時に第2クラッチの伝達トルク容量を増大させる学習制御により、EVモードでの目標第2クラッチ伝達トルク容量tTc2を求めるため、
この目標第2クラッチ伝達トルク容量tTc2を、第2クラッチ7がスリップするか、しないかの臨界値に決定することができ、第2クラッチ7の伝達トルク容量tTc2が過大になるのを限界まで抑制して、燃費の悪化や動力性能の低下に関する問題を回避するという作用効果を更に確実に達成することができる。
つまり、第2クラッチ7のスリップを検出し、該スリップの検出まで第2クラッチの伝達トルク容量を低下させ、該スリップの検出時に第2クラッチの伝達トルク容量を増大させる学習制御により、EVモードでの目標第2クラッチ伝達トルク容量tTc2を求めるため、
この目標第2クラッチ伝達トルク容量tTc2を、第2クラッチ7がスリップするか、しないかの臨界値に決定することができ、第2クラッチ7の伝達トルク容量tTc2が過大になるのを限界まで抑制して、燃費の悪化や動力性能の低下に関する問題を回避するという作用効果を更に確実に達成することができる。
また本実施例では、上記モータ/ジェネレータ用の安全率を例えば1.0とし、エンジンのトルク分担分について第2クラッチ7の伝達トルク容量を求めるときに用いる安全率(1.3)よりも低くしたから、
エンジントルクが静的な不定分や脈動を内包し、且つ、動特性を持ったものであるのに対し、モータ/ジェネレータ5はエンジン1に比べて、トルクの静的な不定分や脈動が少なく、制御の応答性も高い事実に良く符合し、上記の作用効果を顕著なものにすることができる。
エンジントルクが静的な不定分や脈動を内包し、且つ、動特性を持ったものであるのに対し、モータ/ジェネレータ5はエンジン1に比べて、トルクの静的な不定分や脈動が少なく、制御の応答性も高い事実に良く符合し、上記の作用効果を顕著なものにすることができる。
さらに、第2クラッチ7の伝達トルク容量tTc2の演算に際し、図7のステップS25におけるごとく、モータ/ジェネレータ5の回転変化に伴う回転イナーシャ分だけ補正したモータ/ジェネレータトルクを用いて演算するため、
モータ/ジェネレータ5の回転変化に伴う回転イナーシャ分による影響を目標第2クラッチ伝達トルク容量tTc2から排除して、この目標第2クラッチ伝達トルク容量tTc2を更に正確なものにすることができ、前記の作用効果を更に顕著なものにし得る。
モータ/ジェネレータ5の回転変化に伴う回転イナーシャ分による影響を目標第2クラッチ伝達トルク容量tTc2から排除して、この目標第2クラッチ伝達トルク容量tTc2を更に正確なものにすることができ、前記の作用効果を更に顕著なものにし得る。
なお上記した実施例では省略したが、第2クラッチ7の伝達トルク容量tTc2の演算に際し、モータ/ジェネレータ5から駆動車輪3に向かうトルク変化を惹起する摩擦力で消費されるトルク分だけ低下させたモータ/ジェネレータトルクを用いて第2クラッチ7の伝達トルク容量tTc2を演算したり、
モータ/ジェネレータ5から駆動車輪2に向かうトルク変化を惹起する補機の駆動に費やされるトルク分だけ低下させたモータ/ジェネレータトルクを用いて第2クラッチ7の伝達トルク容量tTc2を演算することができる。
この場合、上記の摩擦力や補機駆動力による影響を目標第2クラッチ伝達トルク容量tTc2から排除して、この目標第2クラッチ伝達トルク容量tTc2を更に正確なものにすることができ、前記の作用効果を更に顕著なものにし得る。
モータ/ジェネレータ5から駆動車輪2に向かうトルク変化を惹起する補機の駆動に費やされるトルク分だけ低下させたモータ/ジェネレータトルクを用いて第2クラッチ7の伝達トルク容量tTc2を演算することができる。
この場合、上記の摩擦力や補機駆動力による影響を目標第2クラッチ伝達トルク容量tTc2から排除して、この目標第2クラッチ伝達トルク容量tTc2を更に正確なものにすることができ、前記の作用効果を更に顕著なものにし得る。
1 エンジン
2 駆動車輪(後輪)
3 自動変速機
4 伝動軸
5 モータ/ジェネレータ
6 第1クラッチ
7 第2クラッチ
8 ディファレンシャルギヤ装置
9 バッテリ
10 インバータ
11 エンジン回転センサ
12 モータ/ジェネレータ回転センサ
13 変速機入力回転センサ
14 変速機出力回転センサ
15 アクセル開度センサ
16 バッテリ蓄電状態センサ
20 統合コントローラ
21 エンジンコントローラ
22 モータ/ジェネレータコントローラ
2 駆動車輪(後輪)
3 自動変速機
4 伝動軸
5 モータ/ジェネレータ
6 第1クラッチ
7 第2クラッチ
8 ディファレンシャルギヤ装置
9 バッテリ
10 インバータ
11 エンジン回転センサ
12 モータ/ジェネレータ回転センサ
13 変速機入力回転センサ
14 変速機出力回転センサ
15 アクセル開度センサ
16 バッテリ蓄電状態センサ
20 統合コントローラ
21 エンジンコントローラ
22 モータ/ジェネレータコントローラ
Claims (6)
- 動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよびモータ/ジェネレータ間に伝達トルク容量を変更可能な第1クラッチを介在させ、モータ/ジェネレータおよび駆動車輪間に伝達トルク容量を変更可能な第2クラッチを介在させ、
エンジンを停止させ、第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチを共に締結することによりエンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能なハイブリッド車両において、
車輪駆動力の少なくとも一部として前記モータ/ジェネレータからの動力を用いた走行中、前記第2クラッチの伝達トルク容量を、モータ/ジェネレータのトルク分担分については、モータ/ジェネレータトルクとモータ/ジェネレータ用の安全率とに基づき、エンジンのトルク分担分についての第2クラッチの伝達トルク容量と切り離して求めるよう構成したことを特徴とする、ハイブリッド車両のクラッチ伝達トルク容量制御装置。 - 請求項1に記載のクラッチ伝達トルク容量制御装置において、
前記モータ/ジェネレータ用の安全率が、エンジンのトルク分担分について第2クラッチの伝達トルク容量を求めるときに用いる安全率よりも低いものであることを特徴とする、ハイブリッド車両のクラッチ伝達トルク容量制御装置。 - 請求項1または2に記載のクラッチ伝達トルク容量制御装置において、
前記第2クラッチの伝達トルク容量は、前記モータ/ジェネレータの回転変化に伴う回転イナーシャ分だけ補正したモータ/ジェネレータトルクを用いて演算するよう構成したことを特徴とする、ハイブリッド車両のクラッチ伝達トルク容量制御装置。 - 請求項1〜3のいずれか1項に記載のクラッチ伝達トルク容量制御装置において、
前記第2クラッチの伝達トルク容量は、前記モータ/ジェネレータから駆動車輪に向かうトルク変化を惹起する補機の駆動に費やされるトルク分だけ低下させたモータ/ジェネレータトルクを用いて演算するよう構成したことを特徴とする、ハイブリッド車両のクラッチ伝達トルク容量制御装置。 - 請求項1〜4のいずれか1項に記載のクラッチ伝達トルク容量制御装置において、
前記第2クラッチの伝達トルク容量は、前記モータ/ジェネレータから駆動車輪に向かうトルク変化を惹起する摩擦力で消費されるトルク分だけ低下させたモータ/ジェネレータトルクを用いて演算するよう構成したことを特徴とする、ハイブリッド車両のクラッチ伝達トルク容量制御装置。 - 請求項1〜5のいずれか1項に記載のクラッチ伝達トルク容量制御装置において、
前記電気走行モードでの第2クラッチの伝達トルク容量は、前記第2クラッチのスリップを検出し、該スリップの検出まで第2クラッチの伝達トルク容量を低下させ、該スリップの検出時に第2クラッチの伝達トルク容量を増大させる学習制御により求めるよう構成したことを特徴とする、ハイブリッド車両のクラッチ伝達トルク容量制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005322198A JP2007126081A (ja) | 2005-11-07 | 2005-11-07 | ハイブリッド車両のクラッチ伝達トルク容量制御装置 |
| EP06255693A EP1783020A3 (en) | 2005-11-07 | 2006-11-04 | Hybrid vehicle control |
| KR1020060108643A KR20070049068A (ko) | 2005-11-07 | 2006-11-06 | 하이브리드 차량의 제어 장치 |
| US11/593,134 US7472769B2 (en) | 2005-11-07 | 2006-11-06 | Hybrid vehicle control system |
| CNA2006101380732A CN1962331A (zh) | 2005-11-07 | 2006-11-07 | 混合动力车控制系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005322198A JP2007126081A (ja) | 2005-11-07 | 2005-11-07 | ハイブリッド車両のクラッチ伝達トルク容量制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007126081A true JP2007126081A (ja) | 2007-05-24 |
Family
ID=37709433
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005322198A Pending JP2007126081A (ja) | 2005-11-07 | 2005-11-07 | ハイブリッド車両のクラッチ伝達トルク容量制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7472769B2 (ja) |
| EP (1) | EP1783020A3 (ja) |
| JP (1) | JP2007126081A (ja) |
| KR (1) | KR20070049068A (ja) |
| CN (1) | CN1962331A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010070138A (ja) * | 2008-09-22 | 2010-04-02 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2010149640A (ja) * | 2008-12-24 | 2010-07-08 | Nissan Motor Co Ltd | エンジン始動制御装置及びエンジン始動制御方法 |
| JP2010188785A (ja) * | 2009-02-16 | 2010-09-02 | Nissan Motor Co Ltd | ハイブリッド車両のクラッチ制御装置およびクラッチ制御方法 |
| JP2012090491A (ja) * | 2010-10-22 | 2012-05-10 | Nissan Motor Co Ltd | 電動車両の制御装置 |
| JP2012218623A (ja) * | 2011-04-12 | 2012-11-12 | Toyota Motor Corp | ハイブリッド車両用駆動装置の制御装置 |
| US8517892B2 (en) | 2011-08-08 | 2013-08-27 | Bae Systems Controls Inc. | Method and apparatus for controlling hybrid electric vehicles |
| US8612078B2 (en) | 2011-08-08 | 2013-12-17 | Bae Systems Controls Inc. | Parallel hybrid electric vehicle power management system and adaptive power management method and program therefor |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7610891B2 (en) * | 2004-04-16 | 2009-11-03 | Avl List Gmbh | Method for controlling the start-up phase of a motor vehicle |
| JP4086018B2 (ja) * | 2004-07-15 | 2008-05-14 | トヨタ自動車株式会社 | ハイブリッド車およびその制御方法並びに動力出力装置 |
| EP1762452A3 (en) * | 2005-09-08 | 2009-05-27 | Nissan Motor Co., Ltd. | Engine starting control device and method |
| CN101291823B (zh) * | 2005-10-14 | 2012-04-25 | 沃尔沃建筑设备公司 | 作业机械 |
| JP4341610B2 (ja) * | 2005-11-09 | 2009-10-07 | 日産自動車株式会社 | ハイブリッド車両のエンジン再始動制御装置 |
| JP2007261498A (ja) * | 2006-03-29 | 2007-10-11 | Nissan Motor Co Ltd | ハイブリッド車両の伝動状態切り替え制御装置 |
| DE102006018059A1 (de) * | 2006-04-19 | 2007-10-31 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Parallelhybridantriebsstranges |
| DE102006049888A1 (de) * | 2006-10-23 | 2008-04-24 | Robert Bosch Gmbh | Verfahren für die Steuerung eines Hybridantriebs |
| DE102007004459A1 (de) * | 2007-01-30 | 2008-07-31 | Zf Friedrichshafen Ag | Hybridantriebsanordnung für ein Fahrzeug mit einem Antriebsstrang |
| DE102007008086A1 (de) * | 2007-02-17 | 2008-09-04 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Antriebsstranges eines Fahrzeuges während eines Schubbetriebes |
| US8688299B2 (en) * | 2007-05-02 | 2014-04-01 | Nissan Motor Co., Ltd. | Mode change control system for hybrid vehicle |
| US9008926B2 (en) * | 2007-11-04 | 2015-04-14 | GM Global Technology Operations LLC | Control of engine torque during upshift and downshift torque phase for a hybrid powertrain system |
| DE102007055785A1 (de) * | 2007-12-13 | 2009-06-18 | Zf Friedrichshafen Ag | Verfahren und Vorrichtung zur Steuerung eines Kriechbetriebes eines Fahrzeuges mit einem Hybridantrieb |
| US8334679B2 (en) * | 2008-01-22 | 2012-12-18 | Honda Motor Co., Ltd. | ACG output voltage control |
| US8217631B2 (en) | 2008-01-22 | 2012-07-10 | Honda Motor Co., Ltd. | ACG output voltage control |
| DE102008041067A1 (de) * | 2008-08-07 | 2010-02-11 | Robert Bosch Gmbh | Druckpumpenvorrichtung für ein Hybridfahrzeug |
| US20110094216A1 (en) * | 2009-10-27 | 2011-04-28 | Gm Global Technology Operations, Inc. | Vehicle energy harvesting device using vehicle thermal gradients |
| US20110105004A1 (en) * | 2009-10-30 | 2011-05-05 | Gm Global Technology Operations, Inc. | Fan system for venting a vehicle |
| US8565990B2 (en) * | 2009-11-13 | 2013-10-22 | Ford Global Technologies, Llc. | Vehicle and method for controlling engine start in a vehicle |
| JP5018972B2 (ja) * | 2010-03-01 | 2012-09-05 | トヨタ自動車株式会社 | 動力伝達制御装置 |
| CN101804811B (zh) * | 2010-04-29 | 2012-10-03 | 中国汽车技术研究中心 | 车辆用混合动力控制系统 |
| US9162664B2 (en) | 2010-05-05 | 2015-10-20 | Ford Global Technologies, Inc. | Vehicle and method for controlling an electric machine and/or engine therein |
| CN101982360A (zh) * | 2010-11-08 | 2011-03-02 | 苏州海格新能源汽车电控系统科技有限公司 | 一种混合动力系统汽车的动态转矩协调方法 |
| US8400112B2 (en) * | 2010-11-10 | 2013-03-19 | Ford Global Technologies, Llc | Method for managing power limits for a battery |
| US8698348B2 (en) | 2011-01-10 | 2014-04-15 | Ford Global Technologies, Llc | System and method for managing a power source in a vehicle |
| CN102101431A (zh) * | 2011-01-21 | 2011-06-22 | 潍柴动力股份有限公司 | 一种混合动力驱动系统及混合动力汽车 |
| US20120225750A1 (en) * | 2011-03-02 | 2012-09-06 | General Electric Company | Turbine drive-train apparatus |
| DE102011078670A1 (de) * | 2011-07-05 | 2013-01-10 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Hybridantriebsstrangs eines Fahrzeugs |
| US9061681B2 (en) * | 2011-07-06 | 2015-06-23 | Aisin Aw Co., Ltd. | Control device |
| JP5807560B2 (ja) * | 2011-07-06 | 2015-11-10 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| US8954236B2 (en) * | 2011-07-28 | 2015-02-10 | Hyundai Motor Company | Device combining motor driven power steering with compressor, and method for controlling the same |
| JP5553175B2 (ja) | 2011-08-30 | 2014-07-16 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| US9109648B2 (en) * | 2011-10-21 | 2015-08-18 | Toyota Jidosha Kabushiki Kaisha | Control device for vehicle |
| WO2013077161A1 (ja) * | 2011-11-25 | 2013-05-30 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP5867514B2 (ja) * | 2011-12-16 | 2016-02-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102012219126A1 (de) * | 2012-10-19 | 2014-04-24 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Hybridantriebsstrangs eines Fahrzeugs |
| US9421965B2 (en) | 2012-11-29 | 2016-08-23 | Ford Global Technologies, Llc | Method and apparatus for limiting engine torque to protect disconnect clutch in a hybrid vehicle |
| US8911324B2 (en) * | 2012-11-29 | 2014-12-16 | Ford Global Technologies, Llc | Method and apparatus for limiting engine torque to protect disconnect clutch in a hybrid vehicle |
| KR101416375B1 (ko) * | 2012-12-18 | 2014-07-08 | 기아자동차 주식회사 | 하이브리드 차량의 엔진클러치의 학습 주기 설정 방법 및 시스템 |
| KR101484215B1 (ko) * | 2013-06-19 | 2015-01-16 | 현대자동차 주식회사 | 하이브리드 차량의 시동모터 고장시 엔진 시동 방법 및 시스템 |
| JP2015093536A (ja) * | 2013-11-11 | 2015-05-18 | スズキ株式会社 | 駆動制御装置 |
| JP2015136994A (ja) * | 2014-01-22 | 2015-07-30 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| KR101567231B1 (ko) * | 2014-07-29 | 2015-11-06 | 현대자동차주식회사 | 하이브리드 자동차의 엔진클러치 제어 장치 및 방법 |
| JP6327541B1 (ja) * | 2017-03-27 | 2018-05-23 | 株式会社安川電機 | モータ制御システム、モータ制御装置、モータ制御方法、及び状態推定装置 |
| US11110908B2 (en) | 2017-04-17 | 2021-09-07 | Hyundai Motor Company | Hybrid vehicle and method of controlling mode transition thereof |
| US11267453B1 (en) * | 2020-12-21 | 2022-03-08 | Ford Global Technologies, Llc | Hybrid vehicle energy management torque control during transitions between transient and steady-state operation |
| US11643067B2 (en) * | 2021-05-25 | 2023-05-09 | Ford Global Technologies, Llc | Method and system for providing torque to clutch in hybrid vehicle |
| CN113978447B (zh) * | 2021-10-27 | 2024-01-09 | 岚图汽车科技有限公司 | 一种扭矩控制方法及相关设备 |
| CN113954842B (zh) * | 2021-10-28 | 2023-03-14 | 中国第一汽车股份有限公司 | 混合轮端扭矩能力确定方法、装置、电子设备及存储介质 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5400678A (en) * | 1992-10-30 | 1995-03-28 | Ford Motor Company | Line pressure optimization in an automatic transmission |
| DE19623847A1 (de) * | 1995-06-16 | 1996-12-19 | Aisin Aw Co | Steuerungssystem für eine Fahrzeugantriebseinheit |
| DE19653231A1 (de) * | 1996-12-20 | 1998-06-25 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Beeinflussung des Getriebeeingangsmomentes |
| JP3775012B2 (ja) * | 1997-08-29 | 2006-05-17 | アイシン・エィ・ダブリュ株式会社 | 車両用ハイブリッド駆動装置 |
| JP3870505B2 (ja) | 1997-08-29 | 2007-01-17 | アイシン・エィ・ダブリュ株式会社 | 車両用ハイブリッド駆動装置 |
| US6338391B1 (en) * | 1999-03-01 | 2002-01-15 | Paice Corporation | Hybrid vehicles incorporating turbochargers |
| DE19934790A1 (de) * | 1999-07-27 | 2001-02-08 | Bosch Gmbh Robert | Antriebssystem für Kraftfahrzeug |
| US6701241B2 (en) | 2000-09-15 | 2004-03-02 | Robert Bosch Gmbh | Method and device for operating a clutch |
| US6692406B2 (en) * | 2001-08-29 | 2004-02-17 | Eaton Corporation | Shift control strategy for use with an automated manual transmission coupled to a turbocharged internal combustion engine |
| DE10158536C5 (de) * | 2001-11-29 | 2015-12-17 | Daimler Ag | Kraftfahrzeugantrieb |
| US7131933B2 (en) * | 2001-12-07 | 2006-11-07 | Toyota Jidosha Kabushiki Kaisha | Vehicle control apparatus having means for changing inertia torque of engine during shifting action or during switching of operating state of lock-up clutch |
| US6974009B2 (en) * | 2002-02-04 | 2005-12-13 | Toyota Jidosha Kabushiki Kaisha | Control apparatus for power train including continuously variable transmission |
| DE10345906A1 (de) * | 2002-10-09 | 2004-04-22 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Verfahren, Vorrichtung und deren Verwendung zum Betrieb eines Kraftfahrzeuges |
| JP3915698B2 (ja) * | 2002-12-27 | 2007-05-16 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド車輌の制御装置 |
| US7261671B2 (en) | 2003-09-10 | 2007-08-28 | Ford Global Technologies, Llc | Hybrid vehicle powertrain with a multiple-ratio power transmission mechanism |
| US7351182B2 (en) * | 2004-10-27 | 2008-04-01 | Aisin Aw Co., Ltd. | Drive apparatus for hybrid vehicle and control method thereof |
-
2005
- 2005-11-07 JP JP2005322198A patent/JP2007126081A/ja active Pending
-
2006
- 2006-11-04 EP EP06255693A patent/EP1783020A3/en not_active Withdrawn
- 2006-11-06 KR KR1020060108643A patent/KR20070049068A/ko not_active IP Right Cessation
- 2006-11-06 US US11/593,134 patent/US7472769B2/en not_active Expired - Fee Related
- 2006-11-07 CN CNA2006101380732A patent/CN1962331A/zh active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010070138A (ja) * | 2008-09-22 | 2010-04-02 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2010149640A (ja) * | 2008-12-24 | 2010-07-08 | Nissan Motor Co Ltd | エンジン始動制御装置及びエンジン始動制御方法 |
| JP2010188785A (ja) * | 2009-02-16 | 2010-09-02 | Nissan Motor Co Ltd | ハイブリッド車両のクラッチ制御装置およびクラッチ制御方法 |
| JP2012090491A (ja) * | 2010-10-22 | 2012-05-10 | Nissan Motor Co Ltd | 電動車両の制御装置 |
| JP2012218623A (ja) * | 2011-04-12 | 2012-11-12 | Toyota Motor Corp | ハイブリッド車両用駆動装置の制御装置 |
| US8517892B2 (en) | 2011-08-08 | 2013-08-27 | Bae Systems Controls Inc. | Method and apparatus for controlling hybrid electric vehicles |
| US8612078B2 (en) | 2011-08-08 | 2013-12-17 | Bae Systems Controls Inc. | Parallel hybrid electric vehicle power management system and adaptive power management method and program therefor |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1962331A (zh) | 2007-05-16 |
| US7472769B2 (en) | 2009-01-06 |
| KR20070049068A (ko) | 2007-05-10 |
| EP1783020A2 (en) | 2007-05-09 |
| US20070102205A1 (en) | 2007-05-10 |
| EP1783020A3 (en) | 2008-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007126081A (ja) | ハイブリッド車両のクラッチ伝達トルク容量制御装置 | |
| JP4462170B2 (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP2007126092A (ja) | ハイブリッド車両のコースティング走行時制動力制御装置 | |
| JP2007069804A (ja) | ハイブリッド車両のエンジン始動応答改善装置 | |
| JP4529940B2 (ja) | ハイブリッド車両の伝動状態切り替え制御装置 | |
| KR100837461B1 (ko) | 하이브리드 차량의 엔진 시동 제어 장치 | |
| JP4816291B2 (ja) | ハイブリッド車両のモータロック防止装置 | |
| JP4561663B2 (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP5454699B2 (ja) | 車両の駆動力制御装置 | |
| US9267481B2 (en) | Hybrid vehicle engine start control system | |
| JP4462169B2 (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| KR100846532B1 (ko) | 하이브리드 차량의 엔진 시동 제어 장치 | |
| JP5418690B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5076516B2 (ja) | ハイブリッド車両の変速時モード切り替え制御装置 | |
| JP5115468B2 (ja) | ハイブリッド車両のエンジン始動・停止制御装置 | |
| JP2007261498A (ja) | ハイブリッド車両の伝動状態切り替え制御装置 | |
| JP2007069817A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP2008179283A (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP4389915B2 (ja) | ハイブリッド車両の降坂路走行制御装置 | |
| JP2007314066A (ja) | ハイブリッド車両のクラッチ締結制御装置 | |
| JP2009262749A (ja) | ハイブリッド車両の発進制御装置 | |
| JP4877383B2 (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP2012086738A (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP2007261395A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP5151702B2 (ja) | 複合ブレーキの協調制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090623 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100309 |