JP2006521252A - 自動化されたディスペンスシステム - Google Patents
自動化されたディスペンスシステム Download PDFInfo
- Publication number
- JP2006521252A JP2006521252A JP2006506052A JP2006506052A JP2006521252A JP 2006521252 A JP2006521252 A JP 2006521252A JP 2006506052 A JP2006506052 A JP 2006506052A JP 2006506052 A JP2006506052 A JP 2006506052A JP 2006521252 A JP2006521252 A JP 2006521252A
- Authority
- JP
- Japan
- Prior art keywords
- label
- pack
- labeling station
- apply
- applicator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/40—Controls; Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C1/00—Labelling flat essentially-rigid surfaces
- B65C1/04—Affixing labels, e.g. wrap-around labels, to two or more flat surfaces of a polyhedral article
- B65C1/042—Affixing labels, e.g. wrap-around labels, to two or more flat surfaces of a polyhedral article using two or more applicators, e.g. cooperating rollers or brushes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/08—Label feeding
- B65C9/18—Label feeding from strips, e.g. from rolls
- B65C9/1865—Label feeding from strips, e.g. from rolls the labels adhering on a backing strip
- B65C9/1876—Label feeding from strips, e.g. from rolls the labels adhering on a backing strip and being transferred by suction means
- B65C9/1884—Label feeding from strips, e.g. from rolls the labels adhering on a backing strip and being transferred by suction means the suction means being a movable vacuum arm or pad
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/26—Devices for applying labels
- B65C9/30—Rollers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
- B65G1/1376—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses the orders being assembled on a commissioning conveyor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65C—LABELLING OR TAGGING MACHINES, APPARATUS, OR PROCESSES
- B65C9/00—Details of labelling machines or apparatus
- B65C9/40—Controls; Safety devices
- B65C2009/401—Controls; Safety devices for detecting the height of articles to be labelled
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T156/00—Adhesive bonding and miscellaneous chemical manufacture
- Y10T156/10—Methods of surface bonding and/or assembly therefor
- Y10T156/1002—Methods of surface bonding and/or assembly therefor with permanent bending or reshaping or surface deformation of self sustaining lamina
- Y10T156/1028—Methods of surface bonding and/or assembly therefor with permanent bending or reshaping or surface deformation of self sustaining lamina by bending, drawing or stretch forming sheet to assume shape of configured lamina while in contact therewith
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T156/00—Adhesive bonding and miscellaneous chemical manufacture
- Y10T156/17—Surface bonding means and/or assemblymeans with work feeding or handling means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T156/00—Adhesive bonding and miscellaneous chemical manufacture
- Y10T156/17—Surface bonding means and/or assemblymeans with work feeding or handling means
- Y10T156/1702—For plural parts or plural areas of single part
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Labeling Devices (AREA)
- Sampling And Sample Adjustment (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Centrifugal Separators (AREA)
- Input Circuits Of Receivers And Coupling Of Receivers And Audio Equipment (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
Abstract
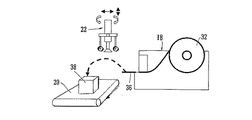
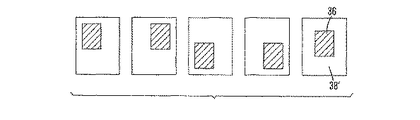
【解決手段】本発明に係る自動化された医薬品のディスペンスシステムは、医薬品パックを選択して取り出す、取り出しサブシステムを備えている。取り出しサブシステムは、パックをラベリングステーションに搬送するように構成されている。ラベリングステーションは、ラベル36に医薬品パック38を受け取る患者の固有情報を印刷するように構成されているラベルプリンタ18と、ラベル36をパック38に貼り付けるラベルアプリケータ22とを有している。ラベルアプリケータ22は、パック38の寸法に基づいて、ラベル36のパック38への貼り付け方を決定することができる。ラベル36は、例えば、予め定められた位置、予め定められた方向、又はパック38の2つの別個の平面にまたがって貼り付けられる。
Description
各命令が少なくとも患者の固有情報の一部及び必要な医薬品の情報を含んでいる、複数の命令を処理する手段と、前記医薬品を包装したパックの少なくとも1つの寸法を判定するために、前記必要な医薬品のデータベースにアクセスする手段と、前記パックの寸法に基づいて、前記パックへのラベルの貼り付け方を決定する手段と、前記患者の固有情報及びラベルアプリケータのパックへのラベルの貼り付け方の指示を含んでいる命令をラベリングステーションに送信する手段とを含む製品を提供する。
ロボットアーム4は、各パックの位置、大きさ及び内容物を識別する情報を記録した在庫データベースを有するコンピュータによって制御される。このことにより、アーム4は、計算して、新しく入ってくる各パックを最適な位置に収納できる。
Claims (73)
- 自動化された医薬品のディスペンスシステムであって、
医薬品のパックを、ラベルに前記パックを受け取る患者の固有情報を印刷するラベルプリンタ及び前記ラベルを前記パックに貼り付ける手段を有するラベリングステーションに搬送するように構成されている、医薬品のパックを選択して取り出す手段と、
前記パックを前記ラベリングステーションからユーザが受け取る場所に搬送する手段とを備えたシステム。 - 在庫品の取り出し及びラベリングシステムであって、
命令に従って在庫品を取り出す手段と、
前記命令に特有の情報に基づいて、前記在庫品に貼り付けられるラベルに印刷する手段と、
前記在庫品に前記ラベルを貼り付ける手段と、
前記在庫品の取り出しと、前記在庫品への特定のラベルの貼り付けとを調整すべく、前記在庫品取り出し手段と前記ラベル貼り付け手段との間のデータ通信を制御する手段とを備えたシステム。 - 請求項1又は2に記載のシステムであって、
前記ラベル貼り付け手段は、前記ラベルが貼り付けられる前記パックの寸法に基づいて、前記ラベルの貼り付け方を変更するように構成されているシステム。 - 請求項3に記載のシステムであって、
前記ラベリングステーションは、前記パックの少なくとも1つの寸法に応じて、前記パックに対して所定の方向に前記ラベルを貼り付けるように構成されているシステム。 - 請求項4に記載のシステムであって、
前記ラベリングステーションは、前記パック及びラベルアプリケータの方向を適切に合わせるように構成されているシステム。 - 請求項5に記載のシステムであって、
前記ラベルアプリケータは、自身の方向を調整可能に構成されているシステム。 - 請求項1乃至6のいずれかに記載のシステムであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別個の面に貼り付けるように構成されているシステム。 - 請求項1乃至7のいずれかに記載のシステムであって、
前記ラベリングステーションは、ラベルの貼り付け方の命令を受け取るように構成されているシステム。 - 請求項1乃至8のいずれかに記載のシステムであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の予め定められた位置に貼り付けるように構成されており、前記位置はパックの種類に応じて変更し得ることを特徴とするシステム。 - 請求項1乃至9のいずれかに記載のシステムであって、
前記ラベルアプリケータが前記ラベルを前記予め定められた位置に貼り付けることができるように、前記ラベリングステーションに情報を送信するように構成されているシステム。 - 請求項1乃至10のいずれかに記載のシステムであって、
ラベルの位置情報を前記ラベリングステーション又はラベルアプリケータに直接的に送信するように構成されているシステム。 - ラベルリング装置であって、
ラベルに印刷する手段と、
前記ラベルを対象物の少なくとも2つの別個の面に貼り付ける手段とを備えた装置。 - 請求項1乃至12のいずれかに記載のシステムであって、
全てのパックに共通サイズのラベルを貼り付けるように構成されているシステム。 - 複数の異なるパックにラベルを貼り付けるためのラベリングステーションであって、
ラベルが貼り付けられるパックの少なくとも1つの寸法を判定する手段と、
前記判定された寸法に基づいた方向でラベルをパックに貼り付ける手段とを備えたラベリングステーション。 - 請求項14に記載のラベリングステーションであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別個の面に貼り付けるように構成されているラベリングステーション。 - 医薬品パックに患者の固有情報を含むラベルを自動的に貼り付けるためのコンピュータソフトウエア製品であって、
各命令が少なくとも患者の固有情報の一部及び必要な医薬品の情報を含んでいる、複数の命令を処理する手段と、
前記医薬品を包装したパックの少なくとも1つの寸法を判定するために、前記必要な医薬品のデータベースにアクセスする手段と、
前記パックの寸法に基づいて、前記パックへのラベルの貼り付け方を決定する手段と、
前記患者の固有情報及びラベルアプリケータのパックへのラベルの貼り付け方の指示を含んでいる命令をラベリングステーションに送信する手段とを含む製品。 - 請求項16に記載のソフトウエア製品であって、
前記ラベルの貼り付け方の指示は、貼り付けられるラベルの方向を決定するコードを含むことを特徴とする製品。 - 請求項16又は17に記載のコンピュータソフトウエア製品を実行するためのシステムであって、
処方薬の注文を生成する、患者データベースを備えた既存の薬局情報技術システムと、
各医薬品パックの位置、サイズ及び入庫日付を記録した在庫データベースを備えており、ロボットアームの動作を制御するロボットアーム・サブシステムと、
前記情報技術システムと前記ロボットアーム・サブシステとの間に存在し、ラベルの印刷及び貼り付けを制御するラベルラベリングシステムとを備えたシステム。 - 単一又は複数のサーバ上で実行されるソフトウエアであって、
少なくとも患者の固有情報の一部及び必要な医薬品を含む命令を受信する手段と、
前記必要な医薬品を参照してデータベースに問い合わせ、該データベースから前記医薬品を包装しているパックの少なくとも1つの寸法に関する判定を受け取る手段と、
前記患者の固有情報及び前記パックの寸法の判定に基づいた、ラベルの前記パックへの貼り付け方の情報或いは指示を含んでいる命令をラベリングステーションに送信する手段とを含むソフトウエア。 - コンピュータソフトウエア製品であって、
適切なデータ処理手段上で実行した際に、
ラベルが貼り付けられるパックをラベリングステーションへ搬送する命令するメッセージを受信し、
前記パックの搬送と、前記パックへの特定のラベルの貼り付けとを調整すべく、前記パックにラベルを貼り付けるためのメッセージを前記ラベリングステーションに送信するように構成されている製品。 - 自動化された医薬品ディスペンスシステムの操作方法であって、
医薬品パックを選択して取り出すステップと、
前記パックをラベリングステーションに搬送するステップと、
ラベルに前記パックを受け取る患者の固有情報を印刷するステップと、
前記ラベルを前記パックに貼り付けるステップと、
前記パックを前記ラベリングステーションからユーザが受け取る場所まで搬送するステップとを含む方法。 - 在庫品を取り出してラベルを貼り付ける方法であって、
命令に従って在庫品を取り出すステップと、
前記在庫品に貼り付けられるラベルに前記命令に特有の情報を印刷するステップと、
前記ラベルを前記在庫品に貼り付けるステップとを含み、
前記在庫品の取り出しと、前記在庫品への特定のラベルの貼り付けとを一致させることを特徴とする方法。 - 請求項21又は22に記載の方法であって、
前記ラベルが貼り付けられる前記パックの寸法に基づいて、ラベルの貼り付け方を変更することを特徴とする方法。 - 請求項24に記載の方法であって、
前記ラベリングステーションは、前記パックの少なくとも1つの寸法に応じて、前記パックに対して所定の方向に前記ラベルを貼り付けることを特徴とする方法。 - 請求項24に記載の方法であって、
前記ラベリングステーションは、前記パック及びラベルアプリケータの方向を適切に合わせることを特徴とする方法。 - 請求項25に記載の方法であって、
前記ラベルアプリケータは、自身の方向を調整可能であることを特徴とする方法。 - 請求項21乃至26の何れかに記載の方法であって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別々の面に貼り付けることを特徴とする方法。 - 請求項21乃至27の何れかに記載の方法であって、
前記ラベリングステーションは、ラベルの貼り付け方の命令を受け取ることを特徴とする方法。 - 請求項21乃至27の何れかに記載の方法であって、
前記ラベルアプリケータは、前記ラベルを前記パック上の予め定められた位置に貼り付け、前記位置はパックの種類に応じて変更し得ることを特徴とする方法。 - 請求項21乃至29の何れかに記載の方法であって、
前記ラベルアプリケータが前記ラベルを前記予め定められた位置に貼り付けることができるように、前記ラベリングステーションに情報を送信することを特徴とする方法。 - 請求項21乃至30の何れかに記載の方法であって、
全てのパックに共通サイズのラベルを貼り付けることを特徴とする方法。 - 医薬品パックに患者の固有情報を含むラベルを自動的に貼り付ける方法であって、
各命令が少なくとも1つの患者の固有情報及び必要な医薬品の情報を含んでいる、複数の命令を処理するステップと、
前記医薬品を包装したパックの少なくとも1つの寸法を判定するために、前記必要な医薬品のデータベースにアクセスするステップと、
前記パックの寸法に基づいて、前記パックへのラベルの貼り付け方を決定するステップと、
前記患者の固有情報及びラベルアプリケータのパックへのラベルの貼り付け方の指示を含んでいる命令をラベリングステーションに送信する手段ステップとを含む方法。 - 自動化された医薬品のディスペンスシステムであって、
医薬品パックを選択して取り出して、前記医薬品パックを、ラベルに前記パックを受け取る患者の固有情報を印刷するラベルプリンタ及び前記ラベルを前記パックに貼り付けるラベルアプリケータ・サブシステムを有するラベリングステーションに搬送するように構成されている選択及び取り出しサブシステムと、
前記パックを前記ラベリングステーションからユーザが受け取る場所に搬送する搬送サブシステムとを備えたシステム。 - 請求項33に記載のシステムであって、
前記ラベルアプリケータ・サブシステムは、前記ラベルが貼り付けられる前記パックの寸法に基づいて、前記ラベルの貼り付け方を変更するように構成されているシステム。 - 請求項34に記載のシステムであって、
前記ラベリングステーションは、前記パックの少なくとも1つの寸法に応じて、前記パックに対して所定の方向に前記ラベルを貼り付けるように構成されているシステム。 - 請求項35に記載のシステムであって、
前記ラベリングステーションは、前記パック及びラベルアプリケータの方向を適切に合わせるように構成されているシステム。 - 請求項36に記載のシステムであって、
前記ラベルアプリケータは、自身の方向を調節できるように構成されているシステム。 - 請求項33に記載のシステムであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別々の面に貼り付けるように構成されているシステム。 - 請求項33に記載のシステムであって、
前記ラベリングステーションは、ラベルの貼り付け方の命令を受け取るように構成されているシステム。 - 請求項33に記載のシステムであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の予め定められた位置に貼り付けるように構成されており、前記位置はパックの種類に応じて変更し得ることを特徴とするシステム。 - 請求項40に記載のシステムであって、
前記ラベルアプリケータが前記ラベルを前記予め定められた位置に貼り付けることができるように、前記ラベリングステーションに情報を送信するように構成されているシステム。 - 請求項33に記載のシステムであって、
ラベルの位置情報を前記ラベリングステーション又はラベルアプリケータに直接的に送信するように構成されているシステム。 - 請求項33に記載のシステムであって、
全てのパックに共通サイズのラベルを貼り付けるように構成されているシステム。 - ラベリング装置であって、
ラベルに印刷するラベルプリンタと、
前記ラベルを対象物の少なくとも2つの別々の面に貼り付けるように構成されているラベルアプリケータとを備えた装置。 - 在庫品を取り出してラベルを貼り付けるシステムであって、
命令に従って在庫品を取り出す取り出しサブシステムと、
前記在庫品に貼り付けられるラベルに前記命令に特有の情報を印刷するラベルプリンタと、
前記ラベルを前記在庫品に貼り付けるラベルアプリケータと、
前記取り出しサブシステム及び前記ラベルアプリケータとデータ通信し、前記在庫品の取り出しと前記在庫品へのラベルの貼り付けとを一致させる制御サブシステムとを備えたシステム。 - 請求項45に記載のシステムであって、
前記ラベルアプリケータは、前記ラベルが貼り付けられる前記パックの寸法に基づいて、前記ラベルの貼り付け方を変更するように構成されているシステム。 - 請求項46に記載のシステムであって、
前記ラベルアプリケータは、前記パックの少なくとも1つの寸法に応じて、前記パックに対して所定の方向に前記ラベルを貼り付けるように構成されているシステム。 - 請求項47に記載のシステムであって、
前記ラベルアプリケータ・サブシステムは、前記パックとラベルアプリケータの相対的な方向を合わせるように構成されているシステム。 - 請求項48に記載のシステムであって、
前記ラベルアプリケータは、自身の方向を調節可能に構成されているシステム。 - 請求項45に記載のシステムであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別々の面に貼り付けるように構成されているシステム。 - 請求項45に記載のシステムであって、
前記ラベリングステーションは、ラベルの貼り付け方の命令を受け取るように構成されているシステム。 - 請求項45に記載のシステムであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の予め定められた位置に貼り付けるように構成されており、前記位置はパックの種類に応じて変更し得ることを特徴とするシステム。 - 請求項52に記載のシステムであって、
前記ラベルアプリケータが前記ラベルを前記予め定められた位置に貼り付けることができるように、前記ラベリングステーションに情報を送信するように構成されているシステム。 - 請求項45に記載のシステムであって、
ラベルの位置情報を前記ラベリングステーションに直接的に送信するように構成されているシステム。 - 複数の異なるパックにラベルを貼り付けるためのラベリングステーションであって、
ラベルが貼り付けられるパックの少なくとも1つの寸法を判定する寸法判定サブシステムと、
前前記判定された寸法に基づいた方向で、ラベルをパックに貼り付けるラベルアプリケータ・サブシステムとを備えたラベリングステーション。 - 請求項55に記載のラベリングステーションであって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別々の面に貼り付けるように構成されているラベリングステーション。 - 医薬品パックに患者の固有情報を含むラベルを自動的に貼り付けるためにコンピュータソフトウエア製品であって、
各命令が少なくとも患者の固有情報の一部及び必要な医薬品の情報を含んでいる、複数の命令を処理するロジックと、
前記医薬品を包装したパックの少なくとも1つの寸法を判定するために、前記必要な医薬品のデータベースにアクセスするロジックと、
前記パックの寸法に基づいて、前記パックへのラベルの貼り付け方を決定するロジックと、
前記患者の固有情報及びラベルアプリケータのパックへのラベルの貼り付け方の指示を含んでいる命令をラベリングステーションに送信するロジックとを含む製品。 - 請求項57に記載のソフトウエア製品であって、
前記ラベルの貼り付け方の指示は、貼り付けられるラベルの方向を決定するコードを含むことを特徴とする製品。 - 請求項57に記載のコンピュータソフトウエア製品を実行するためのシステムであって、
処方薬の注文を生成する、患者データベースを備えた既存の薬局情報技術システムと、
各医薬品パックの位置、サイズ及び入庫日付を記録した在庫データベースを備えており、ロボットアームの動作を制御するロボットアーム・サブシステムと、
前記情報技術システムと前記ロボットアーム・サブシステとの間に存在し、ラベルの印刷及び貼り付けを制御するラベルラベリングシステムとを備えたシステム。 - 単一又は複数のサーバ上で実行されるソフトウエアであって、
少なくとも患者の固有情報の一部及び必要な医薬品を含む命令を受信するロジックと、
前記必要な医薬品を参照してデータベースに問い合わせ、該データベースから前記医薬品を包装しているパックの少なくとも1つの寸法に関する判定を受け取るロジックと、
前記患者の固有情報及び前記パックの寸法の判定に基づいた、ラベルの前記パックへの貼り付け方の情報或いは指示を含んでいる命令をラベリングステーションに送信するロジックとを含むソフトウエア。 - コンピュータソフトウエア製品であって、
適切なデータ処理手段上で実行した際に、
ラベルが貼り付けられるパックのラベリングステーションへの搬送を命令するメッセージを受信し、
前記パックの搬送と、前記パックへの特定のラベルの貼り付けとを調整すべく、前記パックにラベルを貼り付けるためのメッセージを前記ラベリングステーションに送信するように構成されている製品。 - 自動化された医薬品ディスペンスシステムの操作方法であって、
医薬品パックを選択して取り出すステップと、
前記パックを、前記医薬品パックを、ラベルに前記パックを受け取る患者の固有情報を印刷するラベルプリンタ及び前記ラベルを前記パックに貼り付けるラベルアプリケータ・サブシステムを有するラベリングステーションに搬送するステップと、
前記パックを前記ラベリングステーションからユーザが受け取る場所に搬送するステップとを含む方法。 - 請求項62に記載の方法であって、
前記ラベルを貼り付けられる前記パックの寸法に基づいて、ラベルアプリケータによるラベルの貼り付け方を変更することを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベリングステーションは、前記パックの少なくとも1つの寸法に応じて、前記パックに対して所定の方向に前記ラベルを貼り付けることを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベリングステーションは、前記パック及びラベルアプリケータの方向を適切に合わせることを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベルアプリケータは、自身の方向を調整可能であることを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベルアプリケータは、前記ラベルを前記パック上の少なくとも2つの別々の面に貼り付けることを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベリングステーションは、ラベルの貼り付け方の命令を受け取ることを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベルアプリケータは、前記ラベルを前記パック上の予め定められた位置に貼り付け、前記位置はパックの種類に応じて変更し得ることを特徴とする方法。 - 請求項62に記載の方法であって、
前記ラベルアプリケータが前記ラベルを前記予め定められた位置に貼り付けることができるように、前記ラベリングステーションに情報を送信することを特徴とする方法。 - 請求項62に記載の方法であって、
全てのパックに共通サイズのラベルを貼り付けることを特徴とする方法。 - 医薬品パックに患者の固有情報を含むラベルを自動的に貼り付ける方法であって、
各命令が少なくとも1つの患者の固有情報及び必要な医薬品の情報を含んでいる、複数の命令を処理するステップと、
前記医薬品を包装したパックの少なくとも1つの寸法を判定するために、前記必要な医薬品のデータベースにアクセスするステップと、
前記パックの寸法に基づいて、前記パックへのラベルの貼り付け方を決定するステップと、
前記患者の固有情報及びラベルアプリケータのパックへのラベルの貼り付け方の指示を含んでいる命令をラベリングステーションに送信する手段ステップとを含む方法。 - 自動化された薬局の操作方法であって、
ラベルが貼り付けられるパックをラベリングステーションへ搬送する命令するメッセージを受信するステップと、
前記パックの搬送と、前記パックへの特定のラベルの貼り付けとを調整すべく、前記パックにラベルを貼り付けるためのメッセージを前記ラベリングステーションに送信するステップとを含むことを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB0307225.3A GB0307225D0 (en) | 2003-03-28 | 2003-03-28 | Automated dispensing system |
| PCT/GB2004/001368 WO2004085262A1 (en) | 2003-03-28 | 2004-03-29 | Automated dispensing system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006521252A true JP2006521252A (ja) | 2006-09-21 |
| JP2006521252A5 JP2006521252A5 (ja) | 2007-04-19 |
Family
ID=9955764
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006506052A Ceased JP2006521252A (ja) | 2003-03-28 | 2004-03-29 | 自動化されたディスペンスシステム |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US20070102109A1 (ja) |
| EP (3) | EP1620319B1 (ja) |
| JP (1) | JP2006521252A (ja) |
| CN (2) | CN1795125B (ja) |
| AT (2) | ATE508953T1 (ja) |
| AU (1) | AU2004224074B2 (ja) |
| CA (1) | CA2520399A1 (ja) |
| DE (1) | DE602004014267D1 (ja) |
| ES (2) | ES2308169T3 (ja) |
| GB (1) | GB0307225D0 (ja) |
| PT (2) | PT1620319E (ja) |
| WO (1) | WO2004085262A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009292487A (ja) * | 2008-06-03 | 2009-12-17 | Daifuku Co Ltd | ラベル貼付設備 |
| JP2010036903A (ja) * | 2008-07-31 | 2010-02-18 | Sato Knowledge & Intellectual Property Institute | ラベル貼付装置 |
| JP2010052753A (ja) * | 2008-08-27 | 2010-03-11 | Teraoka Seiko Co Ltd | ラベル貼付装置 |
| JP2010540038A (ja) * | 2007-09-21 | 2010-12-24 | オムニケア・インコーポレーテッド | 自動型ラベル検証システム及び医薬品を分配する方法 |
| JP2011046427A (ja) * | 2009-08-28 | 2011-03-10 | Lintec Corp | シート貼付装置及び貼付方法 |
| WO2014002655A1 (ja) * | 2012-06-29 | 2014-01-03 | オオクマ電子株式会社 | 注射液用容器収容箱及び注射液用容器ピッキングシステム |
| KR101452339B1 (ko) * | 2013-12-30 | 2014-10-22 | 주식회사 세다스미디어 | 카세트 병리번호 인식과 슬라이드 자동 출력 방식을 이용한 인공지능 병리번호 매칭 시스템 및 방법 |
| JP2019014520A (ja) * | 2017-07-07 | 2019-01-31 | 東芝機械株式会社 | ラベル貼付装置及びラベル貼付ロボット |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0307225D0 (en) * | 2003-03-28 | 2003-04-30 | Arx Ltd | Automated dispensing system |
| US8231749B2 (en) | 2005-06-02 | 2012-07-31 | Automed Technologies, Inc. | Apparatus and methods for dispensing pre-filled containers with precisely-applied patient-specific information |
| DE102005036398A1 (de) * | 2005-08-03 | 2007-02-15 | Khs Ag | Vorrichtung zum Aufbringen von Banderolen |
| US20080110555A1 (en) * | 2006-11-14 | 2008-05-15 | Steve Bouchelle | Device and method for labeling vials useful in system for dispensing prescriptions |
| US8210351B2 (en) * | 2007-04-19 | 2012-07-03 | Tri State Distribution, Inc. | Labeling system with multiple designs for prescription containers |
| NL1033806C2 (nl) * | 2007-05-04 | 2008-03-18 | 4C Care & Consultancy B V | De vinding garandeert, dat het juiste geneesmiddel, op een veilige wijze vervoert, op het juiste moment, volgens het juiste recept, volgens de juiste methode door de juiste patient wordt ingenomen. |
| US9770871B2 (en) | 2007-05-22 | 2017-09-26 | The Boeing Company | Method and apparatus for layup placement |
| US8818552B2 (en) * | 2007-07-10 | 2014-08-26 | Carefusion 303, Inc. | Point-of-care medication dispensing |
| US8936695B2 (en) | 2007-07-28 | 2015-01-20 | The Boeing Company | Method for forming and applying composite layups having complex geometries |
| US8215543B2 (en) * | 2007-09-21 | 2012-07-10 | Omnicare, Inc. | Methods for filling prescriptions to fulfill a customer order |
| DE102008050580A1 (de) * | 2008-10-06 | 2010-04-08 | Renner Gmbh | Vorrichtung und Verfahren zum Etikettieren von Gegenständen, insbesondere Getränkekisten |
| EP2090514B9 (de) * | 2008-02-12 | 2012-09-19 | Renner GmbH | Etikettiervorrichtung und Verfahren zum Etikettieren von Gegenständen, insbesondere Getränkekisten |
| US8831773B2 (en) * | 2010-02-15 | 2014-09-09 | Mts Medication Technologies, Inc. | Systems and methods for automating pharmacy operations utilizing robotic pick and place technology |
| CA2802916C (en) * | 2010-07-01 | 2015-11-17 | Pcas Patient Care Automation Services Inc. | Vending machine for storage, labeling and dispensing of a container |
| US9272796B1 (en) | 2011-01-11 | 2016-03-01 | Chudy Group, LLC | Automatic drug packaging machine and package-less verification system |
| JP5847461B2 (ja) * | 2011-07-01 | 2016-01-20 | リンテック株式会社 | シート貼付装置及び貼付方法 |
| US9117016B2 (en) | 2012-07-23 | 2015-08-25 | Omnicare, Inc. | Universal label and verification systems and methods for filling customer orders of medical items |
| ES2566364T3 (es) * | 2012-09-28 | 2016-04-12 | Kronoplus Technical Ag | Aparato y procedimiento para aplicar etiquetas a cajas |
| US9352872B2 (en) * | 2012-10-04 | 2016-05-31 | Bell And Howell, Llc | Method and system to print and apply labels to products |
| US9809343B2 (en) | 2012-10-04 | 2017-11-07 | Fluence Automation Llc | Devices, systems, and methods for automatically printing and applying labels to products |
| US9511945B2 (en) | 2012-10-12 | 2016-12-06 | Aesynt Incorporated | Apparatuses, systems, and methods for transporting medications from a central pharmacy to a patient in a healthcare facility |
| US9150119B2 (en) | 2013-03-15 | 2015-10-06 | Aesynt Incorporated | Apparatuses, systems, and methods for anticipating and delivering medications from a central pharmacy to a patient using a track based transport system |
| GB201405120D0 (en) * | 2014-03-21 | 2014-05-07 | Plf Uk Ltd | Labelling machine and labelling methods |
| CN105083669B (zh) * | 2015-05-28 | 2018-01-12 | 青岛海信移动通信技术股份有限公司 | 一种标签打印机 |
| CN106347797B (zh) * | 2015-06-29 | 2018-10-12 | 骆典强 | 一种用于块状物料的自动贴标机的传料机构 |
| CN105083662B (zh) * | 2015-07-09 | 2017-12-15 | 深圳市元博智能科技有限公司 | 一种新型凸形柱面贴标装置 |
| CN105059640B (zh) * | 2015-08-13 | 2018-01-02 | 浙江理工大学 | 一种多功能贴标装置 |
| CH711802A1 (de) * | 2015-11-23 | 2017-05-31 | Wrh Walter Reist Holding Ag | Verfahren zum Ausstatten der Verpackung einer verkaufsfertig verpackten Ware mit zusätzlicher Information, Vorrichtung zur Durchführung des Verfahrens, sowie Informationsträger für ein solches Verfahren. |
| CN105501595B (zh) * | 2015-12-18 | 2019-06-28 | 同方威视技术股份有限公司 | 标签施加装置和方法 |
| CN105836246A (zh) * | 2016-05-20 | 2016-08-10 | 苏州博众精工科技有限公司 | 滚标机构 |
| CN105857802B (zh) * | 2016-06-20 | 2019-06-07 | 国家电网公司 | 一种不干胶标牌安装工具 |
| NL2017126B1 (en) * | 2016-07-07 | 2018-01-15 | Univ Erasmus Med Ct Rotterdam | Labelling device and system comprising such device |
| CN106355267A (zh) * | 2016-08-19 | 2017-01-25 | 广东省自动化研究所 | 一种优化自动贴标机传送带效率的方法 |
| CN106477125A (zh) * | 2016-09-27 | 2017-03-08 | 杭州南江机器人股份有限公司 | 一种自动贴标装置以及贴标方法 |
| CN110002071A (zh) * | 2019-03-28 | 2019-07-12 | 东莞华贝电子科技有限公司 | 自动贴标设备 |
| CN109993926A (zh) * | 2019-05-06 | 2019-07-09 | 东莞东华医院有限公司 | 一种具有核对及贴标签功能的医院药房配药系统及方法 |
| US11673703B1 (en) | 2019-06-07 | 2023-06-13 | Wm Recycle America, L.L.C. | Apparatus and method for applying labels to a customer container from a waste collection, disposal and/or recycling vehicle |
| CN110697185B (zh) * | 2019-11-21 | 2021-03-23 | 安徽文王酿酒股份有限公司 | 一种多箱型自动封箱和贴标装置 |
| US11491600B2 (en) * | 2020-02-14 | 2022-11-08 | In Touch Pharmaceuticals, Inc. | System and method for on demand pill canister production |
| CN112528744B (zh) * | 2020-11-10 | 2022-01-07 | 重庆七腾科技有限公司 | 应用数据解析的重复动作规避平台及方法 |
| CN116280574B (zh) * | 2023-05-25 | 2023-07-21 | 江苏联恒物宇科技有限公司 | 一种用于制备电子标签的上料机构以及上料方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000034925A2 (en) * | 1998-12-10 | 2000-06-15 | Scriptpro Llc | Automatic dispensing system for unit medicament packages |
| JP2001513476A (ja) * | 1997-08-04 | 2001-09-04 | エクスパー エッセ.アー.エッセ. ディ ペローニ ジー. エ チー. | 物体を移送するための方法および装置 |
| JP2002165865A (ja) * | 2000-11-30 | 2002-06-11 | Yuyama Manufacturing Co Ltd | 搬器表示部材の書込み装置 |
| JP2002179040A (ja) * | 2001-09-14 | 2002-06-26 | Ishida Co Ltd | 計量値付装置および包装計量値付装置 |
| WO2004085262A1 (en) * | 2003-03-28 | 2004-10-07 | Arx Limited | Automated dispensing system |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1425351A (en) * | 1921-09-14 | 1922-08-08 | Charles S Weeks | Labeling machine |
| US4095394A (en) * | 1976-10-29 | 1978-06-20 | Evrard Jacques E M | Apparatus for automatically applying flexible strips |
| DE2702482A1 (de) * | 1977-01-21 | 1978-07-27 | Ferrero Ohg | Vorrichtung zum etikettieren von behaeltern |
| FR2656589A1 (fr) * | 1990-01-03 | 1991-07-05 | Rhone Poulenc Agrochimie | Etiqueteuse. |
| JPH046032A (ja) * | 1990-04-13 | 1992-01-10 | Gurafuiko:Kk | 磁気ディスク用ラベル自動貼付装置 |
| US5208762A (en) * | 1990-12-06 | 1993-05-04 | Baxter International Inc. | Automated prescription vial filling system |
| US5232539A (en) * | 1991-02-22 | 1993-08-03 | Grand Rapids Label Company | Object labeling machine |
| US5209808A (en) * | 1991-02-26 | 1993-05-11 | Imtec, Inc. | Corner label applicator system and method |
| US5550745A (en) * | 1994-06-30 | 1996-08-27 | Accu-Sort Systems, Inc. | Moveable label printer-applicator/conveyor loader assembly |
| US5713485A (en) * | 1995-10-18 | 1998-02-03 | Adds, Inc. | Drug dispensing system |
| DE19545191A1 (de) * | 1995-12-04 | 1997-06-05 | Siemens Nixdorf Inf Syst | Vorrichtung zum Bereitstellen und Applizieren von Etiketten und Verfahren zum Betrieb dieser Vorrichtung |
| US5761877A (en) * | 1996-02-23 | 1998-06-09 | Quandt; W. Gerald | System for individual dosage medication distribution |
| US6317648B1 (en) * | 1996-09-06 | 2001-11-13 | Merck & Co., Inc. | Customer specific packaging line having containers with tag means containing medication order information |
| US5798020A (en) * | 1997-06-23 | 1998-08-25 | Scriptpro, Llc | Medicine vial labeler |
| DE19750204A1 (de) * | 1997-11-13 | 1999-05-27 | Etifix Etikettiersysteme Gmbh | Anlage und Verfahren zum Etikettieren von Gegenständen unterschiedlicher Größe |
| US6036812A (en) * | 1997-12-05 | 2000-03-14 | Automated Prescription Systems, Inc. | Pill dispensing system |
| US6173551B1 (en) * | 1998-04-07 | 2001-01-16 | Philip Morris Incorporated | Ink jet coder system and method |
| DE19832548A1 (de) * | 1998-07-21 | 2000-01-27 | Ludwig Meixner | Verfahren und Vorrichtung zur Kennzeichnung von Waren |
| US6428639B1 (en) * | 1999-07-19 | 2002-08-06 | Krones, Inc. | Computer controlled position slaved servo labeling system |
| JP4444414B2 (ja) * | 1999-11-01 | 2010-03-31 | 株式会社湯山製作所 | 錠剤充填装置 |
| US6672356B1 (en) * | 2000-10-17 | 2004-01-06 | Kolinahr Systems, Inc. | Pallet labeler system |
-
2003
- 2003-03-28 GB GBGB0307225.3A patent/GB0307225D0/en not_active Ceased
-
2004
- 2004-03-29 EP EP04724059A patent/EP1620319B1/en not_active Expired - Lifetime
- 2004-03-29 PT PT04724059T patent/PT1620319E/pt unknown
- 2004-03-29 JP JP2006506052A patent/JP2006521252A/ja not_active Ceased
- 2004-03-29 EP EP10181850A patent/EP2272767B1/en not_active Expired - Lifetime
- 2004-03-29 CN CN2004800147763A patent/CN1795125B/zh not_active Expired - Fee Related
- 2004-03-29 AT AT07002728T patent/ATE508953T1/de not_active IP Right Cessation
- 2004-03-29 AU AU2004224074A patent/AU2004224074B2/en not_active Expired - Fee Related
- 2004-03-29 WO PCT/GB2004/001368 patent/WO2004085262A1/en active IP Right Grant
- 2004-03-29 US US10/551,518 patent/US20070102109A1/en not_active Abandoned
- 2004-03-29 PT PT07002728T patent/PT1775224E/pt unknown
- 2004-03-29 EP EP07002728A patent/EP1775224B1/en not_active Expired - Lifetime
- 2004-03-29 CA CA002520399A patent/CA2520399A1/en not_active Abandoned
- 2004-03-29 ES ES04724059T patent/ES2308169T3/es not_active Expired - Lifetime
- 2004-03-29 DE DE602004014267T patent/DE602004014267D1/de not_active Expired - Lifetime
- 2004-03-29 AT AT04724059T patent/ATE397551T1/de not_active IP Right Cessation
- 2004-03-29 CN CN200910174608A patent/CN101683900A/zh active Pending
- 2004-03-29 ES ES07002728T patent/ES2363096T3/es not_active Expired - Lifetime
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001513476A (ja) * | 1997-08-04 | 2001-09-04 | エクスパー エッセ.アー.エッセ. ディ ペローニ ジー. エ チー. | 物体を移送するための方法および装置 |
| WO2000034925A2 (en) * | 1998-12-10 | 2000-06-15 | Scriptpro Llc | Automatic dispensing system for unit medicament packages |
| JP2002165865A (ja) * | 2000-11-30 | 2002-06-11 | Yuyama Manufacturing Co Ltd | 搬器表示部材の書込み装置 |
| JP2002179040A (ja) * | 2001-09-14 | 2002-06-26 | Ishida Co Ltd | 計量値付装置および包装計量値付装置 |
| WO2004085262A1 (en) * | 2003-03-28 | 2004-10-07 | Arx Limited | Automated dispensing system |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010540038A (ja) * | 2007-09-21 | 2010-12-24 | オムニケア・インコーポレーテッド | 自動型ラベル検証システム及び医薬品を分配する方法 |
| US8464932B2 (en) | 2007-09-21 | 2013-06-18 | Omnicare Inc. | Automated label verify systems and methods for dispensing pharmaceuticals |
| US9367981B2 (en) | 2007-09-21 | 2016-06-14 | Omnicare, Inc. | Automated label verify systems and methods for dispensing pharmaceuticals |
| JP2009292487A (ja) * | 2008-06-03 | 2009-12-17 | Daifuku Co Ltd | ラベル貼付設備 |
| JP2010036903A (ja) * | 2008-07-31 | 2010-02-18 | Sato Knowledge & Intellectual Property Institute | ラベル貼付装置 |
| JP2010052753A (ja) * | 2008-08-27 | 2010-03-11 | Teraoka Seiko Co Ltd | ラベル貼付装置 |
| JP2011046427A (ja) * | 2009-08-28 | 2011-03-10 | Lintec Corp | シート貼付装置及び貼付方法 |
| WO2014002655A1 (ja) * | 2012-06-29 | 2014-01-03 | オオクマ電子株式会社 | 注射液用容器収容箱及び注射液用容器ピッキングシステム |
| KR101452339B1 (ko) * | 2013-12-30 | 2014-10-22 | 주식회사 세다스미디어 | 카세트 병리번호 인식과 슬라이드 자동 출력 방식을 이용한 인공지능 병리번호 매칭 시스템 및 방법 |
| JP2019014520A (ja) * | 2017-07-07 | 2019-01-31 | 東芝機械株式会社 | ラベル貼付装置及びラベル貼付ロボット |
| JP6995515B2 (ja) | 2017-07-07 | 2022-01-14 | 芝浦機械株式会社 | ラベル貼付装置及びラベル貼付ロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2272767A1 (en) | 2011-01-12 |
| EP1775224A1 (en) | 2007-04-18 |
| EP1620319A1 (en) | 2006-02-01 |
| EP2272767B1 (en) | 2012-06-20 |
| AU2004224074A1 (en) | 2004-10-07 |
| PT1775224E (pt) | 2011-06-07 |
| DE602004014267D1 (de) | 2008-07-17 |
| CN101683900A (zh) | 2010-03-31 |
| ES2363096T3 (es) | 2011-07-20 |
| CN1795125A (zh) | 2006-06-28 |
| US20070102109A1 (en) | 2007-05-10 |
| GB0307225D0 (en) | 2003-04-30 |
| EP1775224B1 (en) | 2011-05-11 |
| ES2308169T3 (es) | 2008-12-01 |
| CN1795125B (zh) | 2011-12-14 |
| PT1620319E (pt) | 2008-09-17 |
| ATE508953T1 (de) | 2011-05-15 |
| AU2004224074B2 (en) | 2010-12-02 |
| ATE397551T1 (de) | 2008-06-15 |
| CA2520399A1 (en) | 2004-10-07 |
| WO2004085262A1 (en) | 2004-10-07 |
| EP1620319B1 (en) | 2008-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006521252A (ja) | 自動化されたディスペンスシステム | |
| US10577188B2 (en) | Apparatus and methods for dispensing pre-filled containers with precisely-applied patient-specific information | |
| EP1731129B1 (en) | Bottle storage apparatus | |
| JP5421271B2 (ja) | 自動型ラベル検証システム及び医薬品を分配する方法 | |
| JP2006521252A5 (ja) | ||
| JP7178486B2 (ja) | 物品の自動化分配および包装のための装置、システム、および、方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100511 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100804 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100811 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100910 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101007 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101116 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20110329 |