JP2005296672A - トレーニング装置 - Google Patents
トレーニング装置 Download PDFInfo
- Publication number
- JP2005296672A JP2005296672A JP2005167509A JP2005167509A JP2005296672A JP 2005296672 A JP2005296672 A JP 2005296672A JP 2005167509 A JP2005167509 A JP 2005167509A JP 2005167509 A JP2005167509 A JP 2005167509A JP 2005296672 A JP2005296672 A JP 2005296672A
- Authority
- JP
- Japan
- Prior art keywords
- load
- movable
- movable part
- trainee
- training
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012549 training Methods 0.000 title claims description 151
- 230000033001 locomotion Effects 0.000 claims abstract description 56
- 230000002829 reductive effect Effects 0.000 claims abstract description 47
- 230000009467 reduction Effects 0.000 claims abstract description 29
- 238000012544 monitoring process Methods 0.000 claims description 34
- 230000008859 change Effects 0.000 claims description 12
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 238000004364 calculation method Methods 0.000 description 67
- 238000000034 method Methods 0.000 description 33
- 230000006870 function Effects 0.000 description 28
- 230000008569 process Effects 0.000 description 23
- 210000003205 muscle Anatomy 0.000 description 17
- 238000005259 measurement Methods 0.000 description 12
- 230000033764 rhythmic process Effects 0.000 description 10
- 238000012545 processing Methods 0.000 description 8
- 239000013585 weight reducing agent Substances 0.000 description 7
- 238000001514 detection method Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 230000036544 posture Effects 0.000 description 5
- 238000004088 simulation Methods 0.000 description 5
- 239000004065 semiconductor Substances 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 3
- 230000000638 stimulation Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000008450 motivation Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 208000019901 Anxiety disease Diseases 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 210000000577 adipose tissue Anatomy 0.000 description 1
- 230000036506 anxiety Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 230000003387 muscular Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000007958 sleep Effects 0.000 description 1
Images













Landscapes
- Rehabilitation Tools (AREA)
Abstract
【解決手段】 トレーニング者の運動により駆動されるハンドルバー11にトルクモータ15により負荷をかける。ハンドルバー11を動かすトレーニング者の動きが止まりそうになったら、負荷を徐々に軽減する。負荷を軽減したことによりハンドルバー11が再び動き始めたら、トレーニング者が運動を再開したと見なし、そのときの負荷を、例えばハンドルバー11の移動方向が変わるまで維持する。トレーニング者の疲労の限界において負荷を徐々に軽減することにより、運動の再開・継続を促進することができる。従って、トレーニング者は当初運動を始めるにあたり目標としていた運動量を達成できるという充実感を得ることができる。
【選択図】 図1
Description
つまり、トレーニング者が疲労した場合に運動をやめてしまうのではなく、目標とする運動を完遂できるよう支援しながら無理なく運動できるトレーニング機器は未だ提案されていない。
・前記可動部が可動しているときの可動状態を監視する可動部監視手段、
・前記可動部監視手段の監視によって前記可動部の可動状態に所定の状態が検出された場合、前記第1の負荷を第2の負荷に変化させる負荷調整手段。
以上の例は、トレーニング途中で負荷を増大させるものであるが、これとは逆に、トレーニング者にとって負荷が大きすぎる場合には負荷を低減させるようにすることができる。
トレーニング装置が、例えばトレーニング者が仰臥状態でハンドルバーを上げ下げするベンチプレスタイプのものである場合を例に取る。トレーニング者がハンドルバーを上げている途中でハンドルバーが止まってしまうと、負荷が重すぎて運動が停止したと見なされる。この場合、トレーニング者が再びハンドルバーを押し上げ始めるまで、負荷が徐々に減らされる。ハンドルバーが再び上がり始めると、その時の負荷が、例えばハンドルバーが上がりきるまで維持される。軽減された負荷の値を、そのまま維持しても良いし、所定のタイミングで戻しても良い。停滞とは、所定の動作時間中において可動部、例えばハンドルバーが所定位置に留まり移動していない状態を言い、トレーニング中にハンドルバーが完全に停止する場合だけでなく、さらにその速さが所定値以下になる場合を含んでいても良い。所定の動作時間とは、ハンドルバーが往復運動すべきトレーニング時間である。
発明3は、発明1または2において、前記可動部の可動領域に少なくとも1つの基準位置を設定する設定手段をさらに備えるトレーニング装置を提供する。この装置は、前記基準位置に対して予め定められた前記可動部の可動方向に沿って、前記可動部が前記基準位置を越えた場合に前記可動部を停止させるまたは運動に対する負荷をゼロにする。
可動範囲はトレーニング者の体格、性別、トレーニング経験や運動の種類など様々な要因により異なる。
また、ここで、第1方向及び第2方向とは直線状の移動のみならず、互いに逆の方向を示すものであればよく、例えば円弧を描くような曲線状の移動方向も含むものである。上記ベンチプレスの場合であれば主に上下方向の直線的な動作となるが、トレーニング者が椅子に腰掛け足の脛部を動かすようなトレーニング装置にも本願第3発明は適用が可能である。
例えば発明4のベンチプレスにおいて、ハンドルバーが上昇しているときに第1の負荷から第2の負荷に変化した場合、ハンドルバーの移動方向が上向きから下向きに切り替わるまで第2の負荷を維持し、切り替わった際に負荷を第3の負荷にすることが挙げられる。また例えば、ロウイングのようにハンドルバーを引き下げる運動であれば、ハンドルバーが下降しているときに第1の負荷から第2の負荷に変化した場合、ハンドルバーが下降から上昇に転じるまで第2の負荷を維持し、切り替わった際に負荷を第3の負荷にすることが挙げられる。この場合、ハンドルバーが上昇しきるまで、あるいは下降しきるまで軽減後の負荷の値を維持することにより、運動の再開を支援することができる。
前述のベンチプレスを再び例に取る。負荷を軽減したことによりトレーニング者が運動を再開してハンドルバーを一番上まで押し上げた後に下げるときは、負荷を重くしてもよい。なぜなら、ハンドルバーを下げるときのトレーニング者の耐荷重は、ハンドルバーを上げるときのトレーニング者の耐荷重よりも高いのが通常だからである。ただし、軽減後の負荷とそこから戻す負荷との差が大きすぎると筋肉への刺激が強すぎるため、本発明においては負荷の差に制限を設けることによってトレーニング者の運動の安全性をより確実にしている。具体的には、戻した後の第3の負荷W3は、軽減前の第1の負荷W1を超えず(W3≦W1)、かつ軽減後の第2の負荷W2の130%〜140%を上限とすることで筋肉に無理な負荷がかかることを回避できる(W2≦W3≦W2×1.3〜1.4)。
また、ここで、第1方向及び第2方向とは直線状の移動のみならず、互いに逆の方向を示すものであればよく、例えば円弧を描くような曲線状の移動方向も含むものである。上記ベンチプレスの場合であれば主に上下方向の直線的な動作となるが、トレーニング者が椅子に腰掛け足の脛部を動かすようなトレーニング装置にも本願第3発明は適用が可能である。
可動状態として、可動部の移動速度を監視することが挙げられる。移動速度は、モータの回転数を監視することにより検出できるので、可動部の可動状態を容易かつ正確に把握することができる。
再びベンチプレスを例に取る。可動タイミングとは、例えばトレーニング者がハンドルバーを動かすテンポである。さらにスピーカを設け、テンポに合うかけ声や音楽などを出力しても良い。コーチに代えてトレーニング装置がテンポを指定することで、トレーニング者は適切な速度でハンドルバーを動かすよう努力するようになる。
発明10は、発明9において、前記指示手段は、前記可動部を動かす可動タイミングの指標を図表によって前記表示部に示すことにより、前記可動タイミングに関する指示を出力することを特徴とするトレーニング装置を提供する。
例えばベンチプレスにおいて、トレーニング者がハンドルバーを押し上げる速度が遅くなってきたり運動を停止した場合、指定するテンポを遅くしたりテンポの指定を止めたりすることができる。トレーニング者は、遅くした指定テンポに追随できれば、負荷を変えずに目標回数を達成できたという満足感を得ることができる。
発明12は、発明9〜11において、前記可動部の可動状態が停滞のときに前記負荷調整手段により第1の負荷から第2の負荷へ軽減し、前記第2の負荷への軽減後に前記可動部が再度可動し始めた場合、前記指示手段は、軽減された負荷に応じた可動タイミングを指示することを特徴とするトレーニング装置を提供する。
トレーニング者は、1つのハンドルバーを有するトレーニング装置を用い、異なる種類の運動を行うことができる。例えば、シートが座位位置(第1位置)のときは、ショルダープレス及びプルダウンを行う。また、シートが仰臥位置(第2位置)のときは、チェストプレス及びロウイングを行う。トレーニング者が運動途中で座位位置と仰臥位置とを切替える場合には、ハンドルバーを可動範囲の上方または下方に移動させておいてシート位置を切り替えればよい。なお、ここで上記運動の内、ショルダープレス及びチェストプレスとは、ハンドルバーを上昇させるために押し上げの力を要する運動である。これらの運動では、上下動させるハンドルバーの下降の際には、降下してくるハンドルバーをトレーニング者が支えるように力を入れながら徐々に下方に下げる運動である。従って、これらの運動の場合にはトレーニング者にとってハンドルバーを上昇させる方に大きな負荷がかかる。プルダウン及びロウイングとはハンドルバーを下降させるために引き下げの力を要する運動である。これらの運動では、上下動させるハンドルバーが上昇する際には、勝手に上方に上がろうとするハンドルバーを、トレーニング者が手元に引き戻す力を入れながら徐々に上に戻していく。従って、これらの運動の場合にはトレーニング者にとってハンドルバーを下降させる方に大きな負荷がかかる。
本発明に係るトレーニング装置は、トレーニング者の運動により駆動されるハンドルバー(可動部に相当)にモータにより負荷をかける。ハンドルバーを動かすトレーニング者の動きが止まったら、或いはほとんど止まりそうになったら、負荷を徐々に軽減する。負荷を軽減したことによりハンドルバーが再び動き始めたら、トレーニング者が運動を再開したと見なし、そのときの負荷を少なくとも一時的に維持する。
<第1実施形態>
[ハードウェア構成]
1.全体構成
図1は、本発明の第1実施形態に係るトレーニング装置100の構成図である。トレーニング装置100は、例えば店舗に設置され、店舗内のサーバ200と接続される。サーバ200は、トレーニング者の個人データを蓄積しており、トレーニング装置100からの要求に応じてこれを送信する。なお、本実施例においては、サーバ200を店舗内にのみ設置しているが、全国または全世界の店舗内サーバを繋ぐ店舗外サーバを設けてもよい。このような店舗外サーバに会員データを蓄積し、各店舗のサーバがそれにアクセスするようにしてもよい。
図2及び図3に示すトレーニング装置100の一例を参照し、本体10についてさらに具体的に説明する。図2及び図3は、トレーニング装置100の一例を示す。トレーニング装置100は、この例では、シートに着座したトレーニング者がハンドルバー(可動部に相当)11をガイドレール12に沿って上下に動かすことにより、背中や肩、胸の筋肉を鍛えることのできる構造を有している。
次に、トレーニング装置100が有する機能について説明する。トレーニング装置100は、大別してトレーニング機能と運動量調整機能とを有している。各機能は、制御部30により実現される。
1.制御部
再び図1を参照し、制御部30について詳細に説明する。制御部30は、下記(a)〜(f)に示す機能を有している。
(a) 本体10からの検出信号を処理する検出処理部31。検出信号は、モータ信号処理部23、バースイッチ21a,b、シートスイッチ22a,bからの信号である。
(b) 入力部50からの入力信号を受信し、演算部36に渡す受信部32、
(c) サーバ200との間で個人データの送受信を行う通信制御部33、
(d) モニタ70への表示データを生成する画像生成部34、
(e) スピーカ90a,bへの音声データを生成する音声制御部35、
(f) 図示しない半導体メモリに記憶されたプログラムを実行し、制御部30の各部を制御する演算部36。
演算部36は、(A)トレーニング機能及び(B)運動量調整機能を実現するためのプログラムを実行する。演算部36は、可動部監視部36a、負荷調整部36b、再開支援部36c、テンポ指示部36d、トレーニング部36eを有し、これらにより前記2つの機能を実現する。
トレーニング機能は、図示しない半導体メモリに記憶されたトレーニングプログラムを演算部36のトレーニング部36eが実行することにより実現する。トレーニングプログラムは、トレーニング者の個人データの入力受付、トレーニング者の最大筋力1RM(repetition maximum)の測定、モード選択受付、モード毎の処理、シート位置の指定、トレーニング方法の説明などを行う。
図9は、プログラムモードにおける表示画面例を示す。演算部36は、負荷重量、目標回数、実行した回数、トレーニングの見本などを、画面に出力する。
(B)運動量調整機能
演算部36は、可動部監視部36a、負荷調整部36b、再開支援部36c、テンポ指示部36dを有している。運動調整機能は、図示しない半導体メモリに記憶された運動調整プログラムを前記各部36a〜dが実行することにより実現する。運動調整プログラムは、ハンドルバー11に加える負荷の調整や、ハンドルバー11を上下させる指定テンポの調整を行う。以下に、(1)負荷調整機能と(2)指定テンポ調整機能とに分け、運動調整プログラムの機能ついて、さらに説明する。
(1−1)負荷軽減機能
可動部監視部36a(可動部監視手段に相当)は、ハンドルバー11の可動状態(移動している状態)、を継続的に監視する。この例では、ハンドルバー11が動く速さを可動状態として監視する。ハンドルバー11が動く速さは、トルクモータ15の回転速度を検出信号処理部31で検出することにより監視されている。ハンドルバー11の速さが所定の動作時間中に所定値以下になった場合、負荷調整部36b(負荷調整手段に相当)はハンドルバー11が停滞したと見なし、ハンドルバー11に加える負荷を徐々に軽減する。例えば所定値ΔWずつ負荷を軽減し、軽減する毎にハンドルバー11の速さが所定の値以上になるかどうかを判定する。所定の動作時間とは、ハンドルバー11が往復運動すべきトレーニング時間である。負荷の軽減によりハンドルバー11の速さが所定値を超えた場合、再開支援部36c(再開支援手段に相当)はトレーニング者が運動を再開したと見なし、そのときの負荷を少なくとも一時的に維持する。なお、この場合、ハンドルバー11の停滞とは、ハンドルバー11が完全に停止する場合を含み、さらにその速さが所定値以下になる場合を含んでいても良い。
(1−2)負荷復活機能
演算部36の負荷調整部36bは、負荷W1から負荷W2に負荷を軽減した後、所定のタイミングで負荷を戻す(負荷調整手段に相当)。具体的には、運動の再開によりハンドルバー11が所定の位置に到達した後、軽減前の負荷W1を超えない範囲で負荷を重くする。
負荷の軽減は、上記と同様、チェストプレスを例とすれば、ハンドルバー11が上昇する場合にのみ行い、下降する場合には行わなくてもよい。すなわち、演算部36は、ハンドルバー11の運動方向を監視し、ハンドルバー11が上昇している場合にのみ、負荷の調整を行う。この理由は、上述のようにハンドルバー11を下げるときのトレーニング者の耐荷重は、ハンドルバー11を上げるときのトレーニング者の耐荷重よりも高いため、ハンドルバー11を下げるときには負荷を軽減する必要性に乏しいからである。言い換えれば、トレーニング者は下方へ向かってくる荷重を支えるだけであるので、上方へ荷重を押し上げる場合に比べて肉体的に耐えやすいからである。なお、ハンドルバー11が動く方向の監視は、トルクモータ15の回転方向を検出信号処理部31で検出することにより行っている。なお、上記の負荷軽減は、チェストプレスのようにハンドルバー11を上方に押し上げるときにトレーニング者に負荷がかかる運動を例にとって説明している。逆に、ロウイングなどハンドルバー11を下方に下げるときにトレーニング者に負荷が係る運動の場合には、これとは逆にハンドルバー11を引き下げる場合に負荷の軽減を行う。
演算部36の負荷調整部36bは、トレーニング者がハンドルバー11を動すことのできる可動範囲を測定することが好ましい。可動範囲は、トレーニング者によって個人差がある。また、トレーニングの部位により、可動範囲が異なる。従って、可動範囲は、トレーニング者毎に、かつトレーニングの種類毎に測定する。さらに、同じトレーニング者の同じ部位であっても、違うときに測定した可動範囲はそれぞれ少しずつ異なるのが一般的である。従って、測定した可動範囲には適当な遊び幅やデータの有効期限を設定しておくことが好ましい。なお、ハンドルバー11の位置の検出は、トルクモータ15の初期位置からの回転数及び回転方向により求めることができる。
可動部監視部36aは、ハンドルバー11の上下回数をカウントする。カウント方法として、表示可動範囲の上部10%または下部10%の幅にハンドルバー11を移動させた場合に、カウントを行う方法が挙げられる。ここで、表示可動範囲とは、可動範囲のうち、モニタ70に表示される範囲である。
演算部36は、ハンドルバー11の負荷を軽くするだけでなく、重くしても良い。例えば、ハンドルバー11の動きが後述する指定テンポよりも早すぎる場合、負荷がトレーニング者にとっては軽すぎると考えられる。その場合には、演算部36は、徐々に、例えばΔWずつ負荷を重くし、重くする毎にハンドルバー11の速度を監視する。また、重くする毎に新たな指定テンポを算出し、指定テンポとハンドルバー11の速度とを比較する。両者の差が所定範囲以下になるまで、負荷を徐々に重くし、トレーニング者にとって適度な負荷となる様に負荷を調整することもできる。なお、指定テンポは、個人データや負荷の重さに応じて算出される。
(2−1)指定テンポの出力
トレーニング装置100は、ハンドルバー11を上下動すべき可動タイミングの指標を図表によって出力しても良い。例えば、演算部36のテンポ指示部36d(指示手段に相当)は、リズム及び速度の組み合わせで決まるテンポを指示するための画面データや音声データを生成し、モニタ70やスピーカ90に出力する。指定テンポは、年齢や性別、筋力などの個人データや負荷の重さに応じて演算すると良い。トレーニング装置100が指定テンポを出力することで、トレーニング者は適切な速度でハンドルバー11を動かすよう努力し、運動効果が高まると期待できる。なお、テンポ指示部36dは、画面に合わせてテンポに合うかけ声や音楽などを、スピーカ90から出力しても良い。トレーニング者は、遊び感覚で楽しみながら運動するので、運動の苦痛が緩和される。
演算部36は、トレーニング者が運動を途中で停止した場合、実際のハンドルバー11の動きに関わらず指定テンポを出力しても良いが、実際のハンドルバー11の動きに応じて出力するテンポを緩くしても良い。例えば、演算部36は、ハンドルバー11の速さが所定値以下になった場合、ハンドルバー11の速さに応じて指定テンポを緩くしてもよい。トレーニング者は、遅くしたテンポに追随できれば、負荷を変えずに運動を継続できたという満足感を得ることができる。
(2−3)負荷の調整とテンポの調整との組み合わせ
テンポの調整と負荷の調整とを組み合わせて行うとさらに好ましい場合がある。
なお、速度低減や負荷軽減に応じてテンポを遅くするような仕様を採用する場合には、BGMの音楽は流さないようにするのが望ましい。この理由は、本来、BGMは運動のリズムをとるために上記テンポに同期していることから、そのテンポを遅くするとその音楽もゆっくり流れることになりトレーニング者にとっては自らの疲労状態を認識してしまうことにもなり、むしろ運動の達成感を減少させてしまう恐れがあるためである。
演算部36のテンポ指示部36dは、モニタ70上の可動域ウインドウ71に表示する表示可動範囲を、測定された可動範囲の幅よりも狭い範囲とすることが好ましい。例えば、表示可動範囲を、実際の可動範囲から上下10%を削除した範囲とするとよい。こうすることで、モニタ70を見ているトレーニング者にとって、例えばハンドルバー11が可動範囲の下端に到達したと思った地点においても、さらに10%分下げないと本当の可動範囲からは外れない。逆に、ハンドルバー11を上げる場合には、本当の可動範囲の下端から10%分だけハンドルバー11を上げた状態になって初めて、モニタ70上の可動域ウインドウ70の下端に模擬バー73が表示される。
次に、トレーニング装置100の演算部36が実行する処理について、具体例を挙げて説明する。説明を容易にするために、運動量の調整として負荷の調整を行う場合を例に取る。演算部36は、大別して(1)メインルーチン、(2)負荷調整ルーチンを実行する。負荷調整ルーチンは、メインルーチンとは独立に実行される。
図11は、演算部36が実行するメインルーチンの流れの一例を示すフローチャートである。メインルーチンでは、個人データの取得、トレーニング者の可動範囲測定の必要性の判断、各モード毎の処理などを行う。
ステップS1:演算部36は、トレーニング装置100が起動すると、トレーニング方法の概要を示すデモンストレーションを開始する。
ステップS3〜S6:演算部36は、個人データをサーバ200から取得するか、トレーニング者から入力してもらう。具体的には、演算部36は、デモンストレーション中にトランスポンダによりユーザIDが入力された場合(S3)、入力されたユーザIDに対応する個人データを店舗内サーバ200から取得する。取得した個人データに欠落がなければ(S4)、ステップS7に移行する。トランスポンダからの入力がない場合(S3)、演算部36はトレーニング者を認証できない旨の通知を出力し、処理の続行の意思を問い合わせる(S5)。続行の意志がある場合には、データ入力画面(前記図4参照)を表示し、個人データの入力を受け付ける(S6)。また、店舗内サーバ300から取得した個人データに欠落がある場合にも、データ入力画面からの個人データの入力を受け付ける(S4,S6)。
ステップS9〜S10:演算部36は、クイックスタートボタンが押された場合(S9)、“マニュアルモード”を設定し、部位の選択をトレーニング者から受け付ける(S10)。また、演算部36は、負荷や目標回数等の設定を受け付けても良い。
ステップS12:前記ステップS8、S10、S11で、トレーニングの部位及びそれに応じたシート位置が定まると、演算部36は、そのトレーニング部位についてトレーニング者の可動範囲を個人データから抽出する。
ステップS14:演算部36は、設定されているモードや選択された部位に応じたトレーニング処理を開始させる。例えば“マニュアルモード”が設定されていれば、演算部36は、トレーニング者が選択したトレーニングの部位や負荷、目標回数の設定に従い、画面や音声の出力を制御するプログラムを開始させる。また“プログラムモード”が設定されていれば、演算部36は、選択された部位に対応する予め記憶されたトレーニングプログラムに従い、画面や音声出力を行うプログラムを開始させる。このプログラムは、トレーニング者の最大筋力1RMや性別、年齢などの個人データに基づいて、負荷や目標回数を設定する。トレーニング処理中、このメインルーチンとは独立に実行される負荷調整ルーチン(詳細は後述する)により、指示テンポや現在の負荷の値などがモニタ70に出力される。トレーニング処理終了後、演算部36は運動結果を店舗内サーバ300に保存し、ステップS1に戻る。なお、トレーニング処理が終了する条件は、トレーニングの完了により終了する場合と、後述する負荷調整ルーチンから終了を指示された場合である。
ステップS201、S202:演算部36は、これから行おうとするトレーニングの部位に基づき、シート位置の変更が必要か否かを判断する(S201)。変更が必要な場合にはステップS202に移行し、シート位置の変更を指示する画面をモニタ70に出力する。変更不要な場合には、メインルーチンに戻る。
ステップS205:演算部36は、トレーニング者により決定ボタンが押下されるのを待機し(S205)、メインルーチンに戻る。
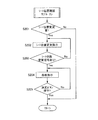
図13(a),(b)は、演算部36が実行する負荷調整ルーチンの流れの一例を示すフローチャートである。演算部36は、この例では、プログラムモードまたはマニュアルモードにおける処理が実行されているときに、負荷調整ルーチンを実行する。この処理は、次の流れで行う。
フロー中期:ハンドルバー11が上がりきると、負荷を所定の制限内で戻す(S110〜S115)。
(2−1)フロー初期
ステップS100:演算部36は、プログラムモードまたはマニュアルモードが設定されているか否かを判断する。測定モードでバーを動かしているときや最大筋力を測定しているときに負荷を軽減しないためである。
ステップS103〜S104:所定時間T2を経過してもハンドルバー11の速さが所定の速さ以下の場合(S103)、演算部36はハンドルバー11の動く方向が上向き(ポジティブレップという)か下向き(ネガティブレップという)かを判断する(S104)。
ステップS106:演算部36は、軽減した結果、ハンドルバー11が所定の速さ以上で動き出すか否かを判断する(S106)。例えば所定時間以上経過してもハンドルバー11の速さが所定値以下であれば、ハンドルバー11は動いていないと判断する(S106)。
ステップS109:負荷を軽減した結果ハンドルバー11が動き始めたら、演算部36は、それ以上負荷を軽減することを停止し、軽減後の負荷の値W2を維持する。
ステップS110:演算部36は、負荷の値W2を維持したまま、ハンドルバー11が可動範囲の上端に到達するまで負荷W2を維持する。上端に到達したか否かの判断は、若干の遊びを許容するように行うことが好ましい。
例えば、可動範囲を示す最高位置がLtとすると、0.95×Lt〜1.1×Ltの高さ範囲にハンドルバー11が入れば、可動範囲の上端に到達したと見なすことが挙げられる。同様に、可動範囲の最低位置がLbとすると、0.95×Lb〜1.1×Ltの高さ範囲にハンドルバー11が入れば、可動範囲の下端に到達したと見なすことが挙げられる。トレーニング者がハンドルバー11を動かす範囲は、毎回可動範囲と正確に一致するわけではなく、実際には可動範囲と若干ずれるからである。
なお、本実施例においては、上端に達したか否かの判断を、ハンドルバー11が可動範囲の最高位置に達したか否かによって行っているが、必ずしもこの判断に限定されるものではなく、可動範囲内であっても所定の高さに達すれば上端に達したとしてモニタ70にその旨の表示を行い、トレーニング者に対して逆方向へ移動させる指示を行う一方、上記の通りの負荷設定を行うようにしてもよい。
例えば、可動範囲については、装置によってはハンドルバーが下がった場合の下端位置のみを設定しておき、上方については可動範囲を設定しないようにしてもよく、この場合、上記の通りの負荷設定を行えばよい。
ステップS115:演算部36は、減量前の負荷W1と減量後の負荷W2との差が所定の上限を超えていれば、その上限まで負荷を重くする。例えば、W1>W2×1.3であれば、負荷をW2×1.3に戻す。
ステップS116〜S118:演算部36は、ハンドルバー11が可動範囲の下端に到達すると(S116)、支援回数Nsを(Ns+1)とし、更新した支援回数Nsと所定の支援回数Nmaxとを比較する(S117)。Ns<Nmaxであれば、再びステップS101に戻り、トレーニング者の動きが止まったときには負荷を軽減することによりトレーニングの継続を支援する。逆にNs≧Nmaxであれば、運動終了をメインルーチンに指示し、処理を終了する(S118)。
なお、上記負荷調整ルーチンでは、プログラムモードとマニュアルモードの時に負荷の調整を行っているが、どのようなモードをトレーニング装置100に設定し、その中のどのモードに置いて負荷の調整を行うかは適宜変更可能である。また、上記ルーチンでは負荷調整回数が上限まで実行されるとトレーニングが終了するが、必ずしもその必要はない。さらに、負荷W1を負荷W2に軽減してハンドルバー11が上がりきった後、負荷を再び重くしているが、これは必ずしも必要ではない。例えば、軽減した負荷W2をそのまま維持して最後までトレーニングさせても良い。加えて、ハンドルバー11を上げるときにのみ負荷の調整を行っているが、他の種類のトレーニングを行う装置においては、トレーニング者が駆動する部分がいかなる方向に動くときでも負荷の調整を行うようにすることもできる。
以上述べたように、本発明に係るトレーニング装置は、トレーニング者の疲労を検知したときに、トレーニングを継続できるようにトレーニング者を支援する。支援は、トレーニングを再開するのに必要最小限な程度に行うので、トレーニング者はトレーニング後に適度な達成感を得ることができる。負荷の軽減は、筋肉に強い刺激を与えない程度に徐々に行い、また好ましくは支援回数に上限を設けるので、負荷の軽減によりトレーニング者に負担をかけることを防止できる。また、負荷の調整をトレーニング者の耐荷重が少ないような運動方向において行えば、支援を必要最小限に抑える上でさらに好ましい。
(A)前記第1実施形態では、トレーニング者の疲労を検出した場合に負荷の調整のみを行ったが、ハンドルバー11を上げ下げするための指定テンポの調整を、負荷の調整と共に行っても良い。例えば、負荷を軽減する代わりに指定テンポを速くすること、トレーニング者の疲労を検出した場合に指定テンポを緩くすること、が挙げられる。
10:本体
20:制御部
11:ハンドルバー
15:トルクモータ
36:演算部
36a:可動部監視部
36b:負荷調整部
36c:再開支援部
36d:テンポ指示部
36e:トレーニング部
Claims (13)
- 運動用に供される可動部に電気的な負荷発生器により第1の負荷をかけるトレーニング装置であって、
前記可動部が可動しているときの可動状態を監視する可動部監視手段と、
前記可動部監視手段の監視によって前記可動部の可動状態に所定の状態が検出された場合、前記第1の負荷を第2の負荷に変化させる負荷調整手段と、
を備えることを特徴とするトレーニング装置。 - 前記所定の状態が前記可動部の停滞のとき、前記第2の負荷が前記第1の負荷より軽減されていることを特徴とする、請求項1に記載のトレーニング装置。
- 前記可動部の可動領域に少なくとも1つの基準位置を設定する設定手段をさらに備え、
前記基準位置に対して予め定められた前記可動部の可動方向に沿って、前記可動部が前記基準位置を越えた場合に前記可動部を停止させる、または運動に対する負荷をゼロにすることを特徴とする請求項1または2に記載のトレーニング装置。 - 前記可動部は、第1方向及びこれと逆方向の第2方向に移動可能とされ、
前記可動部監視手段は、前記可動部の移動方向をさらに監視し、
前記負荷調整手段は、前記可動部がいずれかの方向に沿って移動しているときに前記第1の負荷から前記第2の負荷に変化させた場合、前記可動部監視手段の監視によって前記可動部の移動方向が他方向に切り替わる際に、負荷を第3の負荷にすることを特徴とする、請求項1または2に記載のトレーニング装置。 - 前記負荷調整手段は、前記可動部監視手段により前記可動部の移動方向が切り替わるのを検出するまで、前記第2の負荷を維持することを特徴とする、請求項4に記載のトレーニング装置。
- 前記負荷調整手段は、前記可動部監視手段により前記可動部の移動方向が切り替わる際に、前記第1の負荷以下で前記第2の負荷以上の範囲に前記第3の負荷を調整することを特徴とする、請求項5に記載のトレーニング装置。
- 前記可動部は、第1方向及びこれと逆方向の第2方向に移動可能とされ、
前記可動部監視手段は、前記可動部の移動方向をさらに監視し、
前記負荷調整手段は、前記可動部が前記第1方向に沿って移動しているときにのみ前記第1の負荷から前記第2の負荷への軽減を行うことを特徴とする、請求項1乃至6のいずれかに記載のトレーニング装置。 - 前記可動部監視手段は、前記可動部の移動の速さを監視し、前記速さが所定値以下に低下した状態が所定時間継続したか否かを判断し、
前記負荷調整手段は、前記速さが所定値以下に低下した状態が所定時間継続した場合、前記第1の負荷を前記第2の負荷に軽減することを特徴とする請求項2乃至7のいずれかに記載のトレーニング装置。 - 表示部と、
前記可動部を動かす可動タイミングに関する指示を前記表示部に出力する指示手段と、
をさらに備えることを特徴とする、請求項1乃至8のいずれかに記載のトレーニング装置。 - 前記指示手段は、前記可動部を動かす可動タイミングの指標を図表によって前記表示部に示すことにより、前記可動タイミングに関する指示を出力することを特徴とする、請求項9に記載のトレーニング装置。
- 前記可動部監視手段は前記可動部の移動の速さを監視し、
前記指示手段は、前記可動部の速さの変化に応じ、指示する可動タイミングを変化させることを特徴とする、請求項9または10に記載のトレーニング装置。 - 前記可動部の可動状態が停滞のときに前記負荷調整手段により第1の負荷から第2の負荷へ軽減し、前記第2の負荷への軽減後に前記可動部が再度可動し始めた場合、前記指示手段は、軽減された負荷に応じた可動タイミングを指示することを特徴とする、請求項9,10または11に記載のトレーニング装置。
- 前記トレーニング装置は、第1位置と第2位置とを切り替え可能なシートユニットをさらに有し、
前記設定手段は、前記シートユニットの前記第1位置と第2位置とについて、それぞれ異なる基準位置を設定することを特徴とする、請求項3に記載のトレーニング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005167509A JP4365806B2 (ja) | 2005-06-07 | 2005-06-07 | トレーニング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005167509A JP4365806B2 (ja) | 2005-06-07 | 2005-06-07 | トレーニング装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004008586A Division JP4199134B2 (ja) | 2004-01-16 | 2004-01-16 | トレーニング装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005296672A true JP2005296672A (ja) | 2005-10-27 |
| JP2005296672A5 JP2005296672A5 (ja) | 2007-03-15 |
| JP4365806B2 JP4365806B2 (ja) | 2009-11-18 |
Family
ID=35328874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005167509A Expired - Fee Related JP4365806B2 (ja) | 2005-06-07 | 2005-06-07 | トレーニング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4365806B2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008168133A (ja) * | 2007-01-12 | 2008-07-24 | Internatl Business Mach Corp <Ibm> | ユーザの身体運動の範囲を追跡するための方法、システム、およびプログラム |
| WO2009116631A1 (ja) | 2008-03-19 | 2009-09-24 | 株式会社日立製作所 | トレーニング装置、及びトレーニング装置の制御方法 |
| JP2013523194A (ja) * | 2010-09-03 | 2013-06-17 | ドン ソン インダストリー マシーン カンパニー リミテッド | フィットネス器具、これを用いた運動管理システム及び運動管理方法 |
| JP2017038756A (ja) * | 2015-08-19 | 2017-02-23 | 智一 丸山 | 運動支援装置、及び、運動支援プログラム |
| KR101794909B1 (ko) * | 2016-06-24 | 2017-11-07 | 우정오 | 중력 제어 모듈을 포함하는 헬스 운동 기기 |
| KR101837699B1 (ko) * | 2017-01-23 | 2018-04-26 | 주식회사 쎄텍 | 디지털 랫 풀다운 |
| KR101840398B1 (ko) * | 2017-01-23 | 2018-05-04 | 주식회사 쎄텍 | 디지털 레그 프레스 |
| JP2018175663A (ja) * | 2017-04-19 | 2018-11-15 | 株式会社リバース・フィット・デザイン | トレーニング装置及びトレーニング方法 |
| JP2019205820A (ja) * | 2019-03-15 | 2019-12-05 | 株式会社コナミスポーツライフ | 運動指示装置、プログラム、トレーニングシステム、及び運動器具 |
| JP2021097990A (ja) * | 2019-12-20 | 2021-07-01 | 株式会社Sportip | トレーニング機器の制御方法 |
| JP2022048052A (ja) * | 2020-09-14 | 2022-03-25 | 知英 川上 | 運動用機器及びトレーニングシステム |
| JP2022547237A (ja) * | 2019-09-10 | 2022-11-10 | ウィトルウィアン インベストメンツ プロプライエタリー リミテッド | フィットネストレーニング装置及びシステム |
| WO2024020604A1 (en) * | 2022-07-18 | 2024-01-25 | Paul Steyn | Adjustable electro-mechanical resistance exercise apparatus |
-
2005
- 2005-06-07 JP JP2005167509A patent/JP4365806B2/ja not_active Expired - Fee Related
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008168133A (ja) * | 2007-01-12 | 2008-07-24 | Internatl Business Mach Corp <Ibm> | ユーザの身体運動の範囲を追跡するための方法、システム、およびプログラム |
| WO2009116631A1 (ja) | 2008-03-19 | 2009-09-24 | 株式会社日立製作所 | トレーニング装置、及びトレーニング装置の制御方法 |
| US8858397B2 (en) | 2008-03-19 | 2014-10-14 | Hitachi, Ltd. | Training device and a control method of the same |
| JP2013523194A (ja) * | 2010-09-03 | 2013-06-17 | ドン ソン インダストリー マシーン カンパニー リミテッド | フィットネス器具、これを用いた運動管理システム及び運動管理方法 |
| JP2017038756A (ja) * | 2015-08-19 | 2017-02-23 | 智一 丸山 | 運動支援装置、及び、運動支援プログラム |
| KR101794909B1 (ko) * | 2016-06-24 | 2017-11-07 | 우정오 | 중력 제어 모듈을 포함하는 헬스 운동 기기 |
| KR101837699B1 (ko) * | 2017-01-23 | 2018-04-26 | 주식회사 쎄텍 | 디지털 랫 풀다운 |
| KR101840398B1 (ko) * | 2017-01-23 | 2018-05-04 | 주식회사 쎄텍 | 디지털 레그 프레스 |
| JP2018175663A (ja) * | 2017-04-19 | 2018-11-15 | 株式会社リバース・フィット・デザイン | トレーニング装置及びトレーニング方法 |
| JP2019205820A (ja) * | 2019-03-15 | 2019-12-05 | 株式会社コナミスポーツライフ | 運動指示装置、プログラム、トレーニングシステム、及び運動器具 |
| JP2022547237A (ja) * | 2019-09-10 | 2022-11-10 | ウィトルウィアン インベストメンツ プロプライエタリー リミテッド | フィットネストレーニング装置及びシステム |
| JP2021097990A (ja) * | 2019-12-20 | 2021-07-01 | 株式会社Sportip | トレーニング機器の制御方法 |
| JP7344560B2 (ja) | 2019-12-20 | 2023-09-14 | 株式会社Sportip | トレーニング機器の制御方法 |
| JP2023162333A (ja) * | 2019-12-20 | 2023-11-08 | 株式会社Sportip | トレーニング機器の制御方法 |
| JP7573318B2 (ja) | 2019-12-20 | 2024-10-25 | 株式会社Sportip | トレーニング機器の制御方法 |
| JP2022048052A (ja) * | 2020-09-14 | 2022-03-25 | 知英 川上 | 運動用機器及びトレーニングシステム |
| JP7624139B2 (ja) | 2020-09-14 | 2025-01-30 | 知英 川上 | 運動用機器及びトレーニングシステム |
| WO2024020604A1 (en) * | 2022-07-18 | 2024-01-25 | Paul Steyn | Adjustable electro-mechanical resistance exercise apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4365806B2 (ja) | 2009-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4199134B2 (ja) | トレーニング装置 | |
| JP4365806B2 (ja) | トレーニング装置 | |
| US20220314077A1 (en) | Multidimensional exercise control system | |
| TWI578959B (zh) | Aerobic exercise aids | |
| CN102089041B (zh) | 健身器械 | |
| KR100791584B1 (ko) | 운동 보조 장치 | |
| JP6184349B2 (ja) | 運動療法装置の制御装置および制御方法 | |
| JP2005296672A5 (ja) | ||
| US20070184952A1 (en) | Training apparatus | |
| JP2019500928A (ja) | 患者の移動および歩行訓練 | |
| US9084911B2 (en) | Treadmill for physiotherapy and method of training patient's legs on the treadmill | |
| AU2021203663A1 (en) | Seated treadmill and method of use | |
| KR20110122618A (ko) | 스쿼트 운동 기구 및 이에 사용되는 운동 부하 제어 장치 | |
| JP3001823B2 (ja) | トレーニングシステム | |
| AU2009203196A1 (en) | Gym equipment for training of chest, deltoids, trapeziums and triceps muscles | |
| JP4949410B2 (ja) | 牽引および引張り運動のためのエクササイズ用トレッドミル | |
| JP2005328926A (ja) | 筋肉トレーニング方法及び筋肉トレーニング装置 | |
| US6967904B2 (en) | Electronic watch for sports apparatus | |
| CN108339237A (zh) | 一种智能化腰腹助力健身椅系统及方法 | |
| JP5188943B2 (ja) | 自動加振健康器具 | |
| JP2007244539A (ja) | 鍛練装置 | |
| TWM301670U (en) | Passive and constant-speed muscle-strength-training-instrument | |
| EP1369148A1 (en) | Eletronic watch for sports apparatus | |
| JP2007275355A (ja) | トレーニング装置 | |
| AU2003200999A1 (en) | Electronic watch for sports apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20060331 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070116 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070122 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20070125 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090804 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090821 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120828 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120828 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130828 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |