JP2004312981A - ロボット充電装置 - Google Patents
ロボット充電装置 Download PDFInfo
- Publication number
- JP2004312981A JP2004312981A JP2003354265A JP2003354265A JP2004312981A JP 2004312981 A JP2004312981 A JP 2004312981A JP 2003354265 A JP2003354265 A JP 2003354265A JP 2003354265 A JP2003354265 A JP 2003354265A JP 2004312981 A JP2004312981 A JP 2004312981A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- induction coil
- charging
- engagement
- receiving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/20—Circuit arrangements or systems for wireless supply or distribution of electric power using microwaves or radio frequency waves
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
- Manipulator (AREA)
Abstract
【課題】ロボットと充電器本体の電気的な接続なしにロボットの電源バッテリーの充電を容易にするロボット充電装置を提供する。
【解決手段】ロボットの電源バッテリーに充電電源を供給して充電するロボット充電装置において、充電器本体と、前記充電器本体に設けられて商用電源を受けて整流し、所定の高周波電流に変換する高周波電流発生部と、前記高周波電流発生部から出力される前記高周波電流を受けて電磁気場を発生する1次誘導コイルと、前記1次誘導コイルから発生された前記電磁気場を放出する供給側端子部とを有する供給充電部と、前記ロボットに設けられて前記供給側端子部とかみ合う受容側端子部と、前記1次誘導コイルから発生された前記電磁気場により誘導電流を発生する2次誘導コイルと、前記2次誘導コイルから発生された前記誘導電流を整流して前記電源バッテリーに直流電源を供給する直流変換部とを有する受け充電部とを含むことを特徴とする。
【選択図】図1
【解決手段】ロボットの電源バッテリーに充電電源を供給して充電するロボット充電装置において、充電器本体と、前記充電器本体に設けられて商用電源を受けて整流し、所定の高周波電流に変換する高周波電流発生部と、前記高周波電流発生部から出力される前記高周波電流を受けて電磁気場を発生する1次誘導コイルと、前記1次誘導コイルから発生された前記電磁気場を放出する供給側端子部とを有する供給充電部と、前記ロボットに設けられて前記供給側端子部とかみ合う受容側端子部と、前記1次誘導コイルから発生された前記電磁気場により誘導電流を発生する2次誘導コイルと、前記2次誘導コイルから発生された前記誘導電流を整流して前記電源バッテリーに直流電源を供給する直流変換部とを有する受け充電部とを含むことを特徴とする。
【選択図】図1
Description
本発明はロボット充電装置に係り、ロボットの電源バッテリーに充電電源を供給して充電するロボット充電装置に関する。
一般に、産業現場では事物を積載、運搬する移動装置としてロボットが使用されている。このようなロボットは移動しながら作業を行うため、作業半径が広くて電源の供給を有線とせず、主にバッテリーを内装して電源を供給している。バッテリーを使用する場合、所定の時間が経過すると、バッテリーの充電作業が必要になる。
かかるロボットのバッテリー充電方法が韓国特許登録公報第1997−583号に開示されている。ロボットは内装しているバッテリーが充電を必要とする状態であるかを判断する。その結果、充電が必要な状態なら、充電器に取り付けられた発光部から発信される光信号をロボットの受光部で受信しながらロボットは充電器に向いて移動する。さらに、ロボットは充電器と電気的に接続されてバッテリーを充電し始める。
しかし、このように電気的に接続可能な接点部分を通じて充電器から電力が供給される従来のロボットは、ロボット側又は充電器側の接点が外部に露出されて導体(例えば、コインなど)、水などによりショート(short)されてバッテリー及びロボット内部回路の故障原因となる。さらに、接点を外部に露出させないように設計する場合、ロボットの底面など接点を備える位置が限定される。
また、ロボットと充電器の接点が正確に接続されなければ、充電されないという問題点もある。これにより、ロボットの正確な位置制御が行われるべきである。
韓国特許登録公報第1997−583号
したがって、本発明の目的は、ロボットと充電器本体との電気的な接続なしにロボットの電源バッテリーの充電を容易にするロボット充電装置を提供することにある。
本発明の他の目的は、ロボットの位置制御誤差の発生時にもロボットの電源バッテリーの充電が可能なロボット充電装置を提供することにある。
上記目的を達成するために、本発明は、ロボットの電源バッテリーに充電電源を供給して充電するロボット充電装置において、充電器本体と、前記充電器本体に設けられて商用電源を受けて整流し、所定の高周波電流に変換する高周波電流発生部と、前記高周波電流発生部から出力される前記高周波電流を受けて電磁気場を発生する1次誘導コイルと、前記1次誘導コイルから発生された前記電磁気場を放出する供給側端子部とを有する供給充電部と、前記ロボットに設けられて前記供給側端子部とかみ合う受容側端子部と、前記1次誘導コイルから発生された前記電磁気場により誘導電流を発生する2次誘導コイルと、前記2次誘導コイルから発生された前記誘導電流を整流して前記電源バッテリーに直流電源を供給する直流変換部とを有する受け充電部とを含むことを特徴とする。
ここで、前記供給側端子部は、前記充電器本体に対して相対移動可能な端子部材と、前記端子部材と前記充電器本体との間に介在される弾性変形可能な緩衝部材とを含むことにより、充電器本体とロボットの凹凸整合による銃撃を減らし、ロボットの捻じり移動時にもロボットが充電位置に置かれることができる。
また、前記受容側端子部は、前記ロボットに対して相対移動可能な端子部材と、前記端子部材と前記ロボットとの間に介在される弾性変形可能な緩衝部材とを含むことにより、 充電器本体とロボットの凹凸整合による銃撃を減らし、ロボットの捻じり移動時にもロボットが充電位置に置かれることができる。
また、前記受容側端子部はかみ合い突起を備え、前記供給側端子部は前記かみ合い突起を受容するかみ合い受容部を備えることが好ましい。
また、前記かみ合い突起と前記かみ合い受容部のうち、少なくとも一つはかみ合い方向に沿って案内傾斜面を有することにより、かみ合い突起がかみ合い受容部に容易に受容されるようにすることが好ましい。
また、前記かみ合い受容部は前記かみ合い突起をかみ合い方向の横方向へ所定の幅だけ流動可能に受容することにより、ロボットが所定の範囲の中で位置制御誤差が発生する場合にかみ合い突起がかみ合い受容部に受容されてロボットが充電位置に置かれることができる。
上述したように、本発明によれば、ロボットと充電器本体の電気的な接続なしにロボットの電源バッテリーの充電を容易にするロボット充電装置が提供される。
さらに、本発明によれば、ロボットの位置制御誤差発生時にもロボットの電源バッテリーの充電が可能なロボット充電装置が提供される。
以下、添付図面を参照して本発明について詳細に説明する。
図1は本発明によるロボット充電装置の制御ブロック図である。示したように、ロボット充電装置は、充電器本体10と;充電器本体10に設けられて外部から入力される商用電源を整流する整流部30及び整流部30を通じて整流された電源を高周波矩形波信号に変換するインバーター32を有する高周波電流発生部と、インバーター32から印加された高周波矩形波信号により電磁気場を発生する1次誘導コイル40と、1次誘導コイル40で発生された前記電磁気場を放出する供給側端子部とを有する供給充電部38と;ロボット20に設けられて供給側端子部とかみ合う受容側端子部と、供給充電部38から放出された電磁気場により誘導電流を発生する2次誘導コイル56と、2次誘導コイル56から発生された誘導電流を整流してバッテリー44に直流電源を供給する直流変換部42とを有する受け充電部54とを含む。
充電器本体10に備えられた供給充電部38は、ロボット20と無線通信を行うための無線通信部36と、前記無線通信部36を通じて伝えられた充電制御部46の制御信号に応じてインバーター32を制御する電力制御部34とをさらに含む。
さらに、ロボット20に備えられた受け充電部54は、充電器本体10と無線通信を行うための無線通信部48と、ロボットメイン制御部50の制御に応じて充電器本体10に備えられた電力制御部34を制御する充電制御部46とをさらに含む。
整流部30は交流電圧である商用電源を整流して直流電圧に変換する。このような整流部30はブリッジダイオードと平滑用コンデンサーを含み、商用電源がブリッジダイオードを通じて電波整流され、平滑用コンデンサを通じて平らな直流電圧に変換される。
インバーター32はトランジスタなどのスイッチング素子(図示せず)を含み、後述する電力制御部34の制御信号に応じてスイッチング素子がオン・オフされる。これにより、整流部30の出力電圧がスイッチング素子の動作により高周波矩形波信号に変換される。高周波矩形波信号が1次誘導コイル40に印加されると、1次誘導コイル40は磁束を発生させる。
無線通信部36は充電器本体10とロボット20との間でデータを無線通信するためのものであって、例えば、近距離R/F通信モジュールなどが設けられる。
電力制御部34はインバーター32に備えられたスイッチング素子のオン・オフを制御して1次誘導コイル40に流れる電流を制御するマイコンが好ましい。無線通信部36を通じて充電制御部46から充電要求信号が受信されると、電力制御部34はスイッチング素子のオン・オフを制御する。これにより、1次誘導コイル40に流れる電流が変化して1次誘導コイル40では磁束が発生する。一方、無線通信部36を通じて充電完了を示す緩衝信号が受信されると、スイッチング素子をオフさせて1次誘導コイル40に流れる電流を遮断して充電を完了させる。
ロボット20と充電器本体10が受容側端子部と供給側端子部により物理的な接触状態にあるとき、充電器本体10の1次誘導コイル40とロボット20の2次誘導コイル56が近接位置に配列される。
充電器本体10の1次誘導コイル40から発生された電磁気場によりロボット20に備えられた2次誘導コイル56は誘導電流を発生させる。この誘導電流は直流変換部42に印加されて直流電源に変換される。
直流変換部42は電圧レギュレータが好ましく、交流電源を直流電源に変換し、ロボット20が必要な電圧に減圧してバッテリー44に提供する。
無線通信部48には近距離R/F通信モジュールなどが装着され、充電器本体10とロボット20との無線通信を行う。
充電制御部46はバッテリー44の充電量を感知するバッテリー充電量感知部(図示せず)による感知結果、バッテリー44の充電が必要であると判断されれば、ロボットメイン制御部50にその判断情報を伝える。これにより、ロボットメイン制御部50は駆動部52を制御してロボット20を充電器本体10に向いて移動させる。ロボット20の位置移動は光信号の送受信により行われる。さらに、充電制御部46はロボットメイン制御部50の制御により無線通信部48を通じて充電制御信号を電力制御部34へ伝送する。
一方、図示しないが、バッテリー44の過剰供給電圧及び電流を遮断するバッテリー保護回路をさらに備えることもできる。
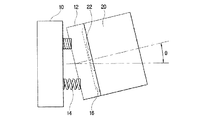
図2はロボット充電装置の上部を示した簡略図である。示したように、充電器本体10に設けられた供給側端子部は、充電器本体10に対して相対移動可能な端子部材12と、前記端子部材12と充電器本体10との間に介在される緩衝部材14とを備え、ロボット20に設けられた受容側端子部はかみ合い突起22を備える。
端子部材12にはかみ合い突起22を受容するかみ合い受容部16が備えられている。ここで、かみ合い受容部16はかみ合い突起22をかみ合い方向の横方向へ所定の幅だけ流動可能に受容することにより、ロボット20が所定の範囲内で位置制御誤差が発生する場合にも、ロボット20と充電器本体10の物理的な接触が可能でロボット20と充電器本体10が近接位置に配列される。これにより、ロボット20に備えられたバッテリー44の充電が可能になる。ここで、近接位置は、充電器本体10の1次誘導コイル40により発生された電磁気場によりロボット20の2次誘導コイル56で誘導電流を発生させる程度の位置範囲をいう。
例えば、図3に示したように、ロボット20がロボット20と充電器本体10との中心線が一致する充電正位置を中心として左右方向(A方向)へ位置誤差(h)が発生する場合にも、所定の範囲内ではかみ合い受容部16がロボット20のかみ合い突起22を受容することができる。
さらに、ロボット充電装置は、充電器本体10の設置時やロボット20にかみ合い突起22を装着するときの上下位置誤差によりロボット20が充電正位置に正確に接触されない点を考慮してかみ合い突起22がかみ合い受容部16に上下方向へも流動可能に受容される。
かみ合い突起22とかみ合い受容部16にはかみ合い方向に沿って案内傾斜面が備えられてかみ合い突起22がかみ合い受容部16に受容されることが容易である。
緩衝部材14はかみ合い突起22がかみ合い受容部16に受容されるときに弾性変形が可能で緩衝作用を行うスプリングが好ましい。さらに、図4に示したように、ロボット20の位置制御が正確に行われなくて中心線から所定の角度(θ)ねじり移動する場合、緩衝部材14は弾性変形されることにより、ロボット20のかみ合い突起22がかみ合い受容部16に受容されて充電器本体10とロボット20の物理的な接触が維持される。すなわち、ロボット20が充電器本体10と近接位置である充電位置に置かれる。
このような構成により、本発明によるロボット充電装置の動作過程を説明すると、次の通りである。まず、充電制御部46でバッテリー充電量感知部の感知結果に基づいてバッテリー44の充電が必要であるかを判断する。充電制御部46は感知されたバッテリー44の電圧が所定のレベル以下として判断される場合、ロボットメイン制御部50にその判断情報を伝える。これにより、ロボットメイン制御部50は駆動部52を制御してロボット20が充電器本体10に向いて移動するようにして端子部材12に備えられたかみ合い受容部16にロボット20に備えられたかみ合い突起22が受容されるようにする。この際、ロボット20の駆動部52の制御が正確に行われなくてロボット20が充電正位置から上下、左右、ねじりなどの誤差が発生してかみ合い突起22がかみ合い受容部16に受容されないことを防止するためにかみ合い受容部16はかみ合い突起22をかみ合い方向の横方向へ流動可能に受容し、緩衝部材14はねじりにより弾性変形が可能である。
このようなロボット20と充電器本体10の物理的な接触後、充電制御部46は無線通信部48を通じて充電制御信号を充電器本体10へ伝送すると、充電器本体10に備えられた無線通信部36を通じて電力制御部34にその充電制御信号が受信される。すると、電力制御部34はインバーター32を制御して高周波矩形波信号を1次誘導コイル40に印加して電磁気場を形成するようにし、電磁気場誘導によりロボット20の2次誘導コイル56では交流電流が発生する。この交流電流は直流変換部42を通じて直流電源に変換され、その直流電源がバッテリー44に供給される。
バッテリー44が完全に充電されると、充電制御部46は無線通信部48を通じて電力制御部34に電源遮断命令を伝送することによりバッテリー44の充電が完了される。
さらに、充電制御部46はロボットメイン制御部50にバッテリー44の緩衝信号を伝送し、ロボットメイン制御部50は駆動部52を制御してかみ合い受容部16にかみ合い突起22が受容された状態を解除する。
これにより、ロボット20の位置制御誤差にかかわらず、ロボット20の電源バッテリー44の自動充電が可能になり、電気的な接続なしに電磁気場の発生による誘導電流により充電が行われるため、従来の充電用接点のショートによるバッテリー44及びロボット20の故障原因を解決することができる。
さらに、充電用の接点を備える必要がなくてロボット20のデザインを制限せず、ロボット20のモデルが変更されても同じ充電装置の使用が可能である。
一方、上述した実施例では端子部材12と緩衝部材14が充電器本体10の供給側端子部に備えられると説明したが、ロボット20の受容側端子部に備えられることもできる。
さらに、上述した実施例では受容側端子部はかみ合い突起22を備え、供給側端子部はかみ合い突起22を受容するかみ合い受容部16を備えると説明したが、受容側端子部がかみ合い受容部16を備え、供給側端子部はかみ合い突起22を備えることもできる。
一方、上述した実施例ではかみ合い突起22とかみ合い受容部16の両方が案内傾斜面を有すると説明したが、かみ合い突起22とかみ合い受容部16のうち、いずれか一つのみが案内傾斜面を有するか、かみ合い突起22とかみ合い受容部16の両方とも案内傾斜面を有することができる。
上述したように、本発明は充電器本体10の1次誘導コイル40から発生された電磁気場によりロボット20の2次誘導コイル56で誘導電流が発生してバッテリー44に充電電圧を供給するようにし、ロボット20の位置制御誤差の発生時にもかみ合い突起22とかみ合い受容部16の構成によりロボット20を充電位置に位置させることにより、ロボット20と充電器本体10の電気的な接続なしにロボット20の電源バッテリー44の充電を容易にし、ロボット20の位置制御誤差発生時にもロボット20の電源バッテリー44の充電が可能になる。
10 充電器本体
12 端子部材
14 緩衝部材
16 かみ合い受容部
20 ロボット
22 かみ合い突起
30 整流部
32 インバーター
34 電力制御部
36,48 無線通信部
38 供給充電部
40 1次誘導コイル
42 直流変換部
44 バッテリー
46 充電制御部
50 ロボットメイン制御部
52 駆動部
54 受け充電部
56 2次誘導コイル
12 端子部材
14 緩衝部材
16 かみ合い受容部
20 ロボット
22 かみ合い突起
30 整流部
32 インバーター
34 電力制御部
36,48 無線通信部
38 供給充電部
40 1次誘導コイル
42 直流変換部
44 バッテリー
46 充電制御部
50 ロボットメイン制御部
52 駆動部
54 受け充電部
56 2次誘導コイル
Claims (6)
- ロボットの電源バッテリーに充電電源を供給して充電するロボット充電装置において、
充電器本体と、
前記充電器本体に設けられて商用電源を受けて整流し、所定の高周波電流に変換する高周波電流発生部と、前記高周波電流発生部から出力される前記高周波電流を受けて電磁気場を発生する1次誘導コイルと、前記1次誘導コイルから発生された前記電磁気場を放出する供給側端子部とを有する供給充電部と、
前記ロボットに設けられて前記供給側端子部とかみ合う受容側端子部と、前記1次誘導コイルから発生された前記電磁気場により誘導電流を発生する2次誘導コイルと、前記2次誘導コイルから発生された前記誘導電流を整流して前記電源バッテリーに直流電源を供給する直流変換部とを有する受け充電部とを含むことを特徴とするロボット充電装置。 - 前記供給側端子部は、前記充電器本体に対して相対移動可能な端子部材と、前記端子部材と前記充電器本体との間に介在される弾性変形可能な緩衝部材とを含むことを特徴とする請求項1に記載のロボット充電装置。
- 前記受容側端子部は、前記ロボットに対して相対移動可能な端子部材と、前記端子部材と前記ロボットとの間に介在される弾性変形可能な緩衝部材とを含むことを特徴とする請求項1に記載のロボット充電装置。
- 前記受容側端子部はかみ合い突起を備え、前記供給側端子部は前記かみ合い突起を受容するかみ合い受容部を備えることを特徴とする請求項1乃至請求項3のうち、いずれか一項に記載のロボット充電装置。
- 前記かみ合い突起と前記かみ合い受容部のうち、少なくとも一つはかみ合い方向に沿って案内傾斜面を有することを特徴とする請求項4に記載のロボット充電装置。
- 前記かみ合い受容部は前記かみ合い突起をかみ合い方向の横方向へ所定の幅だけ流動可能に受容することを特徴とする請求項4に記載のロボット充電装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2003-0022367A KR100488524B1 (ko) | 2003-04-09 | 2003-04-09 | 로봇충전장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004312981A true JP2004312981A (ja) | 2004-11-04 |
Family
ID=33128991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003354265A Pending JP2004312981A (ja) | 2003-04-09 | 2003-10-14 | ロボット充電装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20040201361A1 (ja) |
| JP (1) | JP2004312981A (ja) |
| KR (1) | KR100488524B1 (ja) |
| CN (1) | CN1536735A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100362725C (zh) * | 2005-03-21 | 2008-01-16 | 翰林Postech株式会社 | 非接触式充电系统 |
| JP2008099425A (ja) * | 2006-10-11 | 2008-04-24 | Dainippon Printing Co Ltd | 電力供給装置 |
| KR100907277B1 (ko) * | 2007-02-06 | 2009-07-13 | 성균관대학교산학협력단 | 이동 로봇용 자동충전 시스템 및 그의 충전 방법 |
| JP2012055096A (ja) * | 2010-09-01 | 2012-03-15 | Nok Corp | 非接触給電装置 |
| JP2013215079A (ja) * | 2012-03-30 | 2013-10-17 | Primax Electronics Ltd | ワイヤレス充電器 |
| KR20180020981A (ko) * | 2015-06-24 | 2018-02-28 | 에이비 엘렉트로룩스 | 진공 청소기 시스템 |
| CN108879974A (zh) * | 2017-05-16 | 2018-11-23 | 西南大学 | 一种汽车智能轮胎的无线供电系统 |
| WO2020017776A1 (ko) * | 2018-07-17 | 2020-01-23 | (주)원익로보틱스 | 이동 로봇을 도킹시키는 장치 및 방법 |
| KR102345745B1 (ko) * | 2021-07-27 | 2021-12-30 | 동명대학교산학협력단 | 물류센터용 자율주행로봇 |
Families Citing this family (155)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US6956348B2 (en) | 2004-01-28 | 2005-10-18 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US7571511B2 (en) | 2002-01-03 | 2009-08-11 | Irobot Corporation | Autonomous floor-cleaning robot |
| US6690134B1 (en) | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US7663333B2 (en) | 2001-06-12 | 2010-02-16 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US7332890B2 (en) | 2004-01-21 | 2008-02-19 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| EP1776624A1 (en) | 2004-06-24 | 2007-04-25 | iRobot Corporation | Programming and diagnostic tool for a mobile robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US11209833B2 (en) | 2004-07-07 | 2021-12-28 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US7620476B2 (en) | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8670866B2 (en) | 2005-02-18 | 2014-03-11 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| US7825543B2 (en) * | 2005-07-12 | 2010-11-02 | Massachusetts Institute Of Technology | Wireless energy transfer |
| WO2007008646A2 (en) * | 2005-07-12 | 2007-01-18 | Massachusetts Institute Of Technology | Wireless non-radiative energy transfer |
| ATE534941T1 (de) | 2005-12-02 | 2011-12-15 | Irobot Corp | Abdeckungsrobotermobilität |
| ES2522926T3 (es) | 2005-12-02 | 2014-11-19 | Irobot Corporation | Robot Autónomo de Cubrimiento |
| EP2533120B1 (en) | 2005-12-02 | 2019-01-16 | iRobot Corporation | Robot system |
| US8584305B2 (en) | 2005-12-02 | 2013-11-19 | Irobot Corporation | Modular robot |
| EP2023788B1 (en) | 2006-05-19 | 2011-09-07 | iRobot Corporation | Removing debris from cleaning robots |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| JP4057038B2 (ja) * | 2006-06-05 | 2008-03-05 | メレアグロス株式会社 | 電力伝送方法、電力伝送装置のコイルの選別方法および使用方法 |
| TWI305610B (en) * | 2006-07-07 | 2009-01-21 | Ind Tech Res Inst | Path guidance method for autonomous mobile device |
| KR101322764B1 (ko) | 2006-10-30 | 2013-10-29 | 엘지전자 주식회사 | 무선 전원 공급 장치 및 그 방법 |
| KR101393196B1 (ko) | 2007-05-09 | 2014-05-08 | 아이로보트 코퍼레이션 | 소형 자율 커버리지 로봇 |
| US8805530B2 (en) | 2007-06-01 | 2014-08-12 | Witricity Corporation | Power generation for implantable devices |
| US9421388B2 (en) | 2007-06-01 | 2016-08-23 | Witricity Corporation | Power generation for implantable devices |
| WO2009070334A1 (en) * | 2007-11-27 | 2009-06-04 | Gordon Ewbank Dower | Docking bays for recharging vehicle batteries |
| AU2009246310B9 (en) | 2008-05-14 | 2015-04-02 | Massachusetts Institute Of Technology | Wireless energy transfer, including interference enhancement |
| CN101933212A (zh) * | 2008-05-27 | 2010-12-29 | 戈登·尤班克·道尔 | 用于给车辆电池再充电的对接台 |
| US9318922B2 (en) | 2008-09-27 | 2016-04-19 | Witricity Corporation | Mechanically removable wireless power vehicle seat assembly |
| US8466583B2 (en) | 2008-09-27 | 2013-06-18 | Witricity Corporation | Tunable wireless energy transfer for outdoor lighting applications |
| US8937408B2 (en) | 2008-09-27 | 2015-01-20 | Witricity Corporation | Wireless energy transfer for medical applications |
| US8471410B2 (en) | 2008-09-27 | 2013-06-25 | Witricity Corporation | Wireless energy transfer over distance using field shaping to improve the coupling factor |
| US8901778B2 (en) | 2008-09-27 | 2014-12-02 | Witricity Corporation | Wireless energy transfer with variable size resonators for implanted medical devices |
| US8552592B2 (en) | 2008-09-27 | 2013-10-08 | Witricity Corporation | Wireless energy transfer with feedback control for lighting applications |
| US8692410B2 (en) | 2008-09-27 | 2014-04-08 | Witricity Corporation | Wireless energy transfer with frequency hopping |
| US9093853B2 (en) | 2008-09-27 | 2015-07-28 | Witricity Corporation | Flexible resonator attachment |
| US8907531B2 (en) | 2008-09-27 | 2014-12-09 | Witricity Corporation | Wireless energy transfer with variable size resonators for medical applications |
| US8692412B2 (en) | 2008-09-27 | 2014-04-08 | Witricity Corporation | Temperature compensation in a wireless transfer system |
| US8410636B2 (en) | 2008-09-27 | 2013-04-02 | Witricity Corporation | Low AC resistance conductor designs |
| US9106203B2 (en) | 2008-09-27 | 2015-08-11 | Witricity Corporation | Secure wireless energy transfer in medical applications |
| US9105959B2 (en) | 2008-09-27 | 2015-08-11 | Witricity Corporation | Resonator enclosure |
| US8461720B2 (en) | 2008-09-27 | 2013-06-11 | Witricity Corporation | Wireless energy transfer using conducting surfaces to shape fields and reduce loss |
| US9160203B2 (en) | 2008-09-27 | 2015-10-13 | Witricity Corporation | Wireless powered television |
| US8723366B2 (en) | 2008-09-27 | 2014-05-13 | Witricity Corporation | Wireless energy transfer resonator enclosures |
| US9577436B2 (en) | 2008-09-27 | 2017-02-21 | Witricity Corporation | Wireless energy transfer for implantable devices |
| US9184595B2 (en) | 2008-09-27 | 2015-11-10 | Witricity Corporation | Wireless energy transfer in lossy environments |
| US9601266B2 (en) | 2008-09-27 | 2017-03-21 | Witricity Corporation | Multiple connected resonators with a single electronic circuit |
| US8461721B2 (en) | 2008-09-27 | 2013-06-11 | Witricity Corporation | Wireless energy transfer using object positioning for low loss |
| US8912687B2 (en) | 2008-09-27 | 2014-12-16 | Witricity Corporation | Secure wireless energy transfer for vehicle applications |
| US8587155B2 (en) | 2008-09-27 | 2013-11-19 | Witricity Corporation | Wireless energy transfer using repeater resonators |
| US8643326B2 (en) | 2008-09-27 | 2014-02-04 | Witricity Corporation | Tunable wireless energy transfer systems |
| US9601261B2 (en) | 2008-09-27 | 2017-03-21 | Witricity Corporation | Wireless energy transfer using repeater resonators |
| US9246336B2 (en) | 2008-09-27 | 2016-01-26 | Witricity Corporation | Resonator optimizations for wireless energy transfer |
| US8304935B2 (en) | 2008-09-27 | 2012-11-06 | Witricity Corporation | Wireless energy transfer using field shaping to reduce loss |
| US8669676B2 (en) | 2008-09-27 | 2014-03-11 | Witricity Corporation | Wireless energy transfer across variable distances using field shaping with magnetic materials to improve the coupling factor |
| US8400017B2 (en) | 2008-09-27 | 2013-03-19 | Witricity Corporation | Wireless energy transfer for computer peripheral applications |
| US9544683B2 (en) | 2008-09-27 | 2017-01-10 | Witricity Corporation | Wirelessly powered audio devices |
| US8497601B2 (en) | 2008-09-27 | 2013-07-30 | Witricity Corporation | Wireless energy transfer converters |
| US8933594B2 (en) | 2008-09-27 | 2015-01-13 | Witricity Corporation | Wireless energy transfer for vehicles |
| US9035499B2 (en) | 2008-09-27 | 2015-05-19 | Witricity Corporation | Wireless energy transfer for photovoltaic panels |
| US9744858B2 (en) | 2008-09-27 | 2017-08-29 | Witricity Corporation | System for wireless energy distribution in a vehicle |
| US8476788B2 (en) | 2008-09-27 | 2013-07-02 | Witricity Corporation | Wireless energy transfer with high-Q resonators using field shaping to improve K |
| US8461719B2 (en) | 2008-09-27 | 2013-06-11 | Witricity Corporation | Wireless energy transfer systems |
| US8947186B2 (en) | 2008-09-27 | 2015-02-03 | Witricity Corporation | Wireless energy transfer resonator thermal management |
| US8324759B2 (en) | 2008-09-27 | 2012-12-04 | Witricity Corporation | Wireless energy transfer using magnetic materials to shape field and reduce loss |
| US9515494B2 (en) | 2008-09-27 | 2016-12-06 | Witricity Corporation | Wireless power system including impedance matching network |
| US9065423B2 (en) | 2008-09-27 | 2015-06-23 | Witricity Corporation | Wireless energy distribution system |
| US8629578B2 (en) | 2008-09-27 | 2014-01-14 | Witricity Corporation | Wireless energy transfer systems |
| US8686598B2 (en) | 2008-09-27 | 2014-04-01 | Witricity Corporation | Wireless energy transfer for supplying power and heat to a device |
| US8946938B2 (en) | 2008-09-27 | 2015-02-03 | Witricity Corporation | Safety systems for wireless energy transfer in vehicle applications |
| US8441154B2 (en) | 2008-09-27 | 2013-05-14 | Witricity Corporation | Multi-resonator wireless energy transfer for exterior lighting |
| US8901779B2 (en) | 2008-09-27 | 2014-12-02 | Witricity Corporation | Wireless energy transfer with resonator arrays for medical applications |
| US8963488B2 (en) | 2008-09-27 | 2015-02-24 | Witricity Corporation | Position insensitive wireless charging |
| US8772973B2 (en) | 2008-09-27 | 2014-07-08 | Witricity Corporation | Integrated resonator-shield structures |
| US8487480B1 (en) | 2008-09-27 | 2013-07-16 | Witricity Corporation | Wireless energy transfer resonator kit |
| US8928276B2 (en) | 2008-09-27 | 2015-01-06 | Witricity Corporation | Integrated repeaters for cell phone applications |
| US9601270B2 (en) | 2008-09-27 | 2017-03-21 | Witricity Corporation | Low AC resistance conductor designs |
| US8957549B2 (en) | 2008-09-27 | 2015-02-17 | Witricity Corporation | Tunable wireless energy transfer for in-vehicle applications |
| US8922066B2 (en) | 2008-09-27 | 2014-12-30 | Witricity Corporation | Wireless energy transfer with multi resonator arrays for vehicle applications |
| US8598743B2 (en) | 2008-09-27 | 2013-12-03 | Witricity Corporation | Resonator arrays for wireless energy transfer |
| US8461722B2 (en) | 2008-09-27 | 2013-06-11 | Witricity Corporation | Wireless energy transfer using conducting surfaces to shape field and improve K |
| US8569914B2 (en) | 2008-09-27 | 2013-10-29 | Witricity Corporation | Wireless energy transfer using object positioning for improved k |
| US8482158B2 (en) | 2008-09-27 | 2013-07-09 | Witricity Corporation | Wireless energy transfer using variable size resonators and system monitoring |
| US9396867B2 (en) | 2008-09-27 | 2016-07-19 | Witricity Corporation | Integrated resonator-shield structures |
| US8587153B2 (en) | 2008-09-27 | 2013-11-19 | Witricity Corporation | Wireless energy transfer using high Q resonators for lighting applications |
| US8362651B2 (en) | 2008-10-01 | 2013-01-29 | Massachusetts Institute Of Technology | Efficient near-field wireless energy transfer using adiabatic system variations |
| CN103522902B (zh) * | 2008-10-09 | 2019-05-07 | 丰田自动车株式会社 | 非接触受电装置及具有该非接触受电装置的车辆 |
| JP5287863B2 (ja) | 2008-10-09 | 2013-09-11 | トヨタ自動車株式会社 | 非接触受電装置およびそれを備える車両 |
| JP5554937B2 (ja) * | 2009-04-22 | 2014-07-23 | パナソニック株式会社 | 非接触給電システム |
| US8203232B2 (en) * | 2009-12-10 | 2012-06-19 | Lear Corporation | Embedded wireless communications for electronic control unit having multiple ground references |
| US8212533B2 (en) * | 2009-12-23 | 2012-07-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robot battery charging apparatuses and methods |
| KR101648348B1 (ko) | 2010-04-06 | 2016-08-16 | 삼성전자주식회사 | 무선 전력 충전 기능을 구비한 로봇 청소 시스템 및 제어 방법 |
| CN102315691B (zh) * | 2010-07-01 | 2015-10-21 | 苏州宝时得电动工具有限公司 | 无线充电系统及无线充电方法 |
| US9602168B2 (en) | 2010-08-31 | 2017-03-21 | Witricity Corporation | Communication in wireless energy transfer systems |
| US9948145B2 (en) | 2011-07-08 | 2018-04-17 | Witricity Corporation | Wireless power transfer for a seat-vest-helmet system |
| CN108418314A (zh) | 2011-08-04 | 2018-08-17 | 韦特里西提公司 | 可调谐无线电源架构 |
| AU2012305688B2 (en) | 2011-09-09 | 2017-06-01 | Witricity Corporation | Foreign object detection in wireless energy transfer systems |
| US20130062966A1 (en) | 2011-09-12 | 2013-03-14 | Witricity Corporation | Reconfigurable control architectures and algorithms for electric vehicle wireless energy transfer systems |
| US9318257B2 (en) | 2011-10-18 | 2016-04-19 | Witricity Corporation | Wireless energy transfer for packaging |
| WO2013067484A1 (en) | 2011-11-04 | 2013-05-10 | Witricity Corporation | Wireless energy transfer modeling tool |
| US9543680B2 (en) * | 2011-12-30 | 2017-01-10 | Husqvarna Ab | Contact assembly of a robotic garden tool charging device |
| JP2015508987A (ja) | 2012-01-26 | 2015-03-23 | ワイトリシティ コーポレーションWitricity Corporation | 減少した場を有する無線エネルギー伝送 |
| EP2641460B1 (en) * | 2012-03-19 | 2014-03-12 | Fabrizio Bernini | Apparatus for cutting grass |
| CN103378613B (zh) * | 2012-04-11 | 2015-01-28 | 致伸科技股份有限公司 | 无线充电装置 |
| US9343922B2 (en) | 2012-06-27 | 2016-05-17 | Witricity Corporation | Wireless energy transfer for rechargeable batteries |
| ITVR20120155A1 (it) * | 2012-07-24 | 2014-01-25 | Motive S R L | Motore elettrico con inverter a bordo |
| US9287607B2 (en) | 2012-07-31 | 2016-03-15 | Witricity Corporation | Resonator fine tuning |
| DE102012214199A1 (de) | 2012-08-09 | 2014-04-03 | Bayerische Motoren Werke Aktiengesellschaft | Vorrichtung und Verfahren zur Positionierung durch Triangulation |
| US8977393B1 (en) | 2012-09-12 | 2015-03-10 | Google Inc. | Methods and systems for charging a robotic device |
| US9595378B2 (en) | 2012-09-19 | 2017-03-14 | Witricity Corporation | Resonator enclosure |
| US9601265B2 (en) * | 2012-09-26 | 2017-03-21 | Denso Wave Incorporated | Wireless power transmission apparatus and direct drive type system including the apparatus |
| JP6397417B2 (ja) | 2012-10-19 | 2018-09-26 | ワイトリシティ コーポレーションWitricity Corporation | 無線エネルギー伝送システムにおける異物検出 |
| US9842684B2 (en) | 2012-11-16 | 2017-12-12 | Witricity Corporation | Systems and methods for wireless power system with improved performance and/or ease of use |
| US9397518B1 (en) * | 2013-02-22 | 2016-07-19 | Daniel Theobald | Wirelessly transferring energy to a mobile device |
| CN103151825B (zh) * | 2013-04-09 | 2015-02-11 | 哈尔滨工业大学 | 室内移动机器人非接触自主无线充电装置及方法 |
| KR101989912B1 (ko) * | 2013-08-08 | 2019-06-18 | 에스케이하이닉스 주식회사 | 무선 전력 송신 회로, 무선 전력 수신 회로 및 이를 포함하는 무선 전력 송/수신 시스템 |
| US9509375B2 (en) * | 2013-08-01 | 2016-11-29 | SK Hynix Inc. | Wireless transceiver circuit with reduced area |
| JP2016534698A (ja) | 2013-08-14 | 2016-11-04 | ワイトリシティ コーポレーションWitricity Corporation | インピーダンス同調 |
| US9780573B2 (en) | 2014-02-03 | 2017-10-03 | Witricity Corporation | Wirelessly charged battery system |
| US9952266B2 (en) | 2014-02-14 | 2018-04-24 | Witricity Corporation | Object detection for wireless energy transfer systems |
| US9842687B2 (en) | 2014-04-17 | 2017-12-12 | Witricity Corporation | Wireless power transfer systems with shaped magnetic components |
| US9892849B2 (en) | 2014-04-17 | 2018-02-13 | Witricity Corporation | Wireless power transfer systems with shield openings |
| US9837860B2 (en) | 2014-05-05 | 2017-12-05 | Witricity Corporation | Wireless power transmission systems for elevators |
| JP2017518018A (ja) | 2014-05-07 | 2017-06-29 | ワイトリシティ コーポレーションWitricity Corporation | 無線エネルギー伝送システムにおける異物検出 |
| CN106165244A (zh) * | 2014-05-30 | 2016-11-23 | 株式会社Ihi | 非接触供电系统、受电装置及送电装置 |
| WO2015196123A2 (en) | 2014-06-20 | 2015-12-23 | Witricity Corporation | Wireless power transfer systems for surfaces |
| CN107258046B (zh) | 2014-07-08 | 2020-07-17 | 无线电力公司 | 无线电力传送系统中的谐振器均衡 |
| US10574091B2 (en) | 2014-07-08 | 2020-02-25 | Witricity Corporation | Enclosures for high power wireless power transfer systems |
| US9843217B2 (en) | 2015-01-05 | 2017-12-12 | Witricity Corporation | Wireless energy transfer for wearables |
| US9979221B2 (en) * | 2015-06-24 | 2018-05-22 | Verizon Patent And Licensing Inc. | Contextual assistance for wireless charging |
| US10248899B2 (en) | 2015-10-06 | 2019-04-02 | Witricity Corporation | RFID tag and transponder detection in wireless energy transfer systems |
| EP3362804B1 (en) | 2015-10-14 | 2024-01-17 | WiTricity Corporation | Phase and amplitude detection in wireless energy transfer systems |
| WO2017070227A1 (en) | 2015-10-19 | 2017-04-27 | Witricity Corporation | Foreign object detection in wireless energy transfer systems |
| WO2017070009A1 (en) | 2015-10-22 | 2017-04-27 | Witricity Corporation | Dynamic tuning in wireless energy transfer systems |
| US10075019B2 (en) | 2015-11-20 | 2018-09-11 | Witricity Corporation | Voltage source isolation in wireless power transfer systems |
| JP6956728B2 (ja) | 2016-02-02 | 2021-11-02 | ワイトリシティ コーポレーションWitricity Corporation | ワイヤレス電力伝送システムの制御 |
| CN109075614B (zh) | 2016-02-08 | 2021-11-02 | 韦特里西提公司 | 可变电容装置、阻抗匹配系统、传输系统、阻抗匹配网络 |
| CN109068927A (zh) | 2016-05-04 | 2018-12-21 | 阿尔弗雷德·卡赫欧洲两合公司 | 地板处理系统 |
| CA3023107A1 (en) | 2016-05-06 | 2017-11-09 | Mtd Products Inc | Autonomous mower navigation system and method |
| DE102016115288A1 (de) | 2016-08-17 | 2018-02-22 | Vorwerk & Co. Interholding Gmbh | Ladestation, insbesondere für ein Reinigungsgerät |
| WO2018064810A1 (zh) * | 2016-10-08 | 2018-04-12 | 浙江国自机器人技术有限公司 | 一种移动机器人自主充电装置 |
| CN107046320A (zh) * | 2016-12-26 | 2017-08-15 | 芜湖哈特机器人产业技术研究院有限公司 | 机器人无线充电装置 |
| US11760221B2 (en) * | 2017-06-27 | 2023-09-19 | A9.Com, Inc. | Charging systems and methods for autonomous carts |
| US11043848B2 (en) | 2017-06-29 | 2021-06-22 | Witricity Corporation | Protection and control of wireless power systems |
| KR102375435B1 (ko) * | 2018-03-28 | 2022-03-18 | 한국전자기술연구원 | 자동 충전을 지원하는 충전모듈 구조 및 이를 포함하는 충전시스템 |
| EP3776790A1 (en) * | 2018-04-06 | 2021-02-17 | ABB Schweiz AG | A power transfer system for electric vehicles and a control method thereof |
| CN111937268A (zh) | 2018-04-06 | 2020-11-13 | Abb瑞士股份有限公司 | 用于电动车辆的功率传输系统及其控制方法 |
| WO2019206393A1 (en) | 2018-04-23 | 2019-10-31 | Abb Schweiz Ag | A power transfer system for electric vehicles and a control method thereof |
| KR102137164B1 (ko) | 2018-06-15 | 2020-07-24 | 엘지전자 주식회사 | 안내 로봇 |
| CN111211589A (zh) * | 2018-11-21 | 2020-05-29 | 锥能机器人(上海)有限公司 | 智能充电桩系统及其运行方法 |
| WO2023086666A1 (en) * | 2021-11-15 | 2023-05-19 | St Engineering Aethon, Inc. | Adaptive mobile robot behavior based on payload |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3409145B2 (ja) * | 1993-07-26 | 2003-05-26 | 任天堂株式会社 | 小型電気機器 |
| US5646494A (en) * | 1994-03-29 | 1997-07-08 | Samsung Electronics Co., Ltd. | Charge induction apparatus of robot cleaner and method thereof |
| TW398087B (en) * | 1997-07-22 | 2000-07-11 | Sanyo Electric Co | Pack cell |
| JP4207336B2 (ja) * | 1999-10-29 | 2009-01-14 | ソニー株式会社 | 移動ロボットのための充電システム、充電ステーションを探索する方法、移動ロボット、コネクタ、及び、電気的接続構造 |
| US6184651B1 (en) * | 2000-03-20 | 2001-02-06 | Motorola, Inc. | Contactless battery charger with wireless control link |
| KR100566220B1 (ko) * | 2001-01-05 | 2006-03-29 | 삼성전자주식회사 | 무접점 배터리 충전기 |
-
2003
- 2003-04-09 KR KR10-2003-0022367A patent/KR100488524B1/ko not_active IP Right Cessation
- 2003-10-14 JP JP2003354265A patent/JP2004312981A/ja active Pending
- 2003-11-14 US US10/706,990 patent/US20040201361A1/en not_active Abandoned
- 2003-12-19 CN CNA2003101231289A patent/CN1536735A/zh active Pending
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100362725C (zh) * | 2005-03-21 | 2008-01-16 | 翰林Postech株式会社 | 非接触式充电系统 |
| JP2008099425A (ja) * | 2006-10-11 | 2008-04-24 | Dainippon Printing Co Ltd | 電力供給装置 |
| KR100907277B1 (ko) * | 2007-02-06 | 2009-07-13 | 성균관대학교산학협력단 | 이동 로봇용 자동충전 시스템 및 그의 충전 방법 |
| JP2012055096A (ja) * | 2010-09-01 | 2012-03-15 | Nok Corp | 非接触給電装置 |
| JP2013215079A (ja) * | 2012-03-30 | 2013-10-17 | Primax Electronics Ltd | ワイヤレス充電器 |
| KR102480693B1 (ko) * | 2015-06-24 | 2022-12-22 | 에이비 엘렉트로룩스 | 진공 청소기 시스템 |
| KR20180020981A (ko) * | 2015-06-24 | 2018-02-28 | 에이비 엘렉트로룩스 | 진공 청소기 시스템 |
| CN108879974A (zh) * | 2017-05-16 | 2018-11-23 | 西南大学 | 一种汽车智能轮胎的无线供电系统 |
| WO2020017776A1 (ko) * | 2018-07-17 | 2020-01-23 | (주)원익로보틱스 | 이동 로봇을 도킹시키는 장치 및 방법 |
| KR102345745B1 (ko) * | 2021-07-27 | 2021-12-30 | 동명대학교산학협력단 | 물류센터용 자율주행로봇 |
| KR102468637B1 (ko) * | 2021-07-27 | 2022-11-17 | 동명대학교산학협력단 | 물류센터용 ar글래스 연동형 자율주행로봇 |
| KR20230017098A (ko) * | 2021-07-27 | 2023-02-03 | 동명대학교산학협력단 | 무선충전 기능을 구비한 물류센터용 자율주행로봇 |
| KR20230017097A (ko) * | 2021-07-27 | 2023-02-03 | 동명대학교산학협력단 | 로봇암을 구비한 물류센터용 자율주행로봇 |
| KR102548660B1 (ko) * | 2021-07-27 | 2023-06-27 | 동명대학교산학협력단 | 무선충전 기능을 구비한 물류센터용 자율주행로봇 |
| KR102548659B1 (ko) * | 2021-07-27 | 2023-06-27 | 동명대학교산학협력단 | 로봇암을 구비한 물류센터용 자율주행로봇 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20040201361A1 (en) | 2004-10-14 |
| KR100488524B1 (ko) | 2005-05-11 |
| CN1536735A (zh) | 2004-10-13 |
| KR20040088243A (ko) | 2004-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004312981A (ja) | ロボット充電装置 | |
| US11387688B2 (en) | System and method for coded communication signals regulating inductive power transmissions | |
| US8339097B2 (en) | Non-contact power transfer apparatus | |
| JP6002513B2 (ja) | 非接触給電システム、端末装置および非接触給電方法 | |
| JP4695691B2 (ja) | 無接点充電バッテリー及び充電器、これらを含むバッテリー充電セット、並びに充電制御方法 | |
| WO2011118377A1 (ja) | 非接触受電装置及び非接触充電システム | |
| US10340743B2 (en) | Power transmission device, power transmission method, and wireless power transfer system | |
| JP6918526B2 (ja) | 非接触電力伝送装置及び非接触送電装置 | |
| KR200415537Y1 (ko) | 유선 충전부를 구비하는 무접점 충전장치 | |
| JP2015116023A (ja) | 非接触給電システム及び受電装置 | |
| WO2011118376A1 (ja) | 非接触送電装置及び非接触充電システム | |
| JP6405885B2 (ja) | 給電装置及び給電方法 | |
| KR20090025876A (ko) | 위치인식 무접점 전력 공급장치와 배터리 충전장치 및 이를이용한 충전시스템 | |
| KR20070014804A (ko) | 비접촉 유도 전원 공급 기능을 구비한 장치 및 그 유도전원을 이용하는 장치 | |
| US11979201B2 (en) | System and method for coded communication signals regulating inductive power transmissions | |
| JP6988643B2 (ja) | ワイヤレス受電装置、及びワイヤレス電力伝送システム | |
| KR100301430B1 (ko) | 배터리및그를충전하기위한배터리충전시스템 | |
| CN110718970B (zh) | 送电装置、受电装置及电力传输系统 | |
| KR100482155B1 (ko) | 비접촉식 충전회로를 이용한 테일게이트측 전기장치구동회로 | |
| JP2024016579A (ja) | 給電システム | |
| WO2019176433A1 (ja) | 送電装置、無線給電システム | |
| JP2011211788A (ja) | 非接触送電装置、非接触受電装置、及び非接触充電システム | |
| JP2019176735A (ja) | 端末装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051117 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20060124 |