JP2004179399A - 基板固定方法、基板固定装置、印刷装置および表示装置製造方法 - Google Patents
基板固定方法、基板固定装置、印刷装置および表示装置製造方法 Download PDFInfo
- Publication number
- JP2004179399A JP2004179399A JP2002343955A JP2002343955A JP2004179399A JP 2004179399 A JP2004179399 A JP 2004179399A JP 2002343955 A JP2002343955 A JP 2002343955A JP 2002343955 A JP2002343955 A JP 2002343955A JP 2004179399 A JP2004179399 A JP 2004179399A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- suction
- stage
- holes
- suction unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Abstract
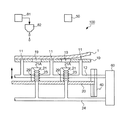
【解決手段】ステージに、複数の吸引孔11および複数の空孔19を設けておく。そして、空孔19のそれぞれに挿入される吸着ユニット29を上昇(第1の方向に移動)させ、ステージ10上の基板1を吸着させる。その後、吸着パッド21の各々を下降(第1の方向と反対方向に移動)させることにより、基板1をステージ10に当接させて、その後、基板1を吸引孔11の各々によって固定する。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、基板をステージ上に固定する方法に係る。
【0002】
【従来の技術】
ガラス基板などの平面基板(以下、単に基板という)をステージ上に載置しておき、ステージ上方から液滴を吐出させて、当該基板上にパターン印刷をするプロセス技術がある。ここで、反りのある基板をステージ上にそのまま載置したのでは、印刷精度が悪くなるため、反りのある基板であっても、ステージ上に平坦に固定しておく必要がある。
このために、ステージに複数の吸引孔を設けておき、ステージ下方から吸引することにより、ステージ上に基板を固定する方法が知られている。そして、基板を平坦にするために、ステージの中央部分では小さく吸引し、ステージの端部分では大きく吸引する、というように吸引力に差をつける方法が提案されている(例えば、特許文献1参照)。
【0003】
【特許文献1】
特開平10−226042号公報(第1図)
【0004】
【発明が解決しようとする課題】
しかしながら、反りの位置や大きさは基板によって異なるから、上述した方法を用いてすべての平面基板を平坦に固定することは不可能である。
本発明は以上の点を考慮して行われたものであり、反りの位置や大きさにばらつきがある個々の基板についてステージ上に平坦に固定するための基板固定方法、基板固定装置、基板固定装置を備えた印刷装置および、基板固定方法を用いて表示装置(有機EL装置、液晶表示装置、プラズマ表示装置など)を製造する方法を提供することを目的とする。
【0005】
【課題を解決するための手段】
上記課題を解決するために、本発明の構成は、複数の吸引孔および複数の空孔を有するステージに基板を固定する基板固定方法であって、前記空孔の各々に挿入された吸着ユニットを第1の方向に移動させて、前記ステージに載置された基板を離間させる過程と、離間した状態の基板を前記吸着ユニットの各々に吸着させる過程と、前記吸着ユニットを、前記第1の方向とは反対方向に移動させて、前記基板を前記ステージに当接させる過程と、前記ステージ上に当接させた基板を、前記複数の吸引孔で吸引する過程とを有することを特徴とする。
【0006】
かかる構成によれば、ステージ上に載置した基板は、ステージの空孔の各々に挿入された吸着パッドが第1の方向に移動されることにより、ステージから離間された状態になり、当該基板は、吸着パッドの各々に吸着させられる。その後、吸着パッドが第1の方向とは反対方向に移動されることにより、当該基板はステージに当接され、基板は空孔の各々によって吸引固定される。このように、ステージ上に載置した基板に反りがあったとしても、当該基板をステージに当接した状態、すなわち、平坦な状態で固定することができる。
【0007】
また、本発明の構成は、複数の吸引孔および複数の空孔を有するステージに基板を固定する方法であって、前記ステージに載置された基板を前記複数の吸引孔で吸引することを開始する過程と、前記複数の吸引孔の各々が、前記基板を吸引しているか否かを判別する過程と、前記複数の吸引孔のうち、当該判別結果が否定的となる吸引孔の近傍に位置する空孔を検出する過程と、当該検出した空孔に挿入された吸着ユニットを第1の方向に移動させて、前記基板を吸着させる過程と、前記基板を吸着した吸着ユニットを、前記第1の方向とは反対方向に移動させて、前記基板を前記ステージに当接させる過程とを有することを特徴としてもよい。
【0008】
かかる構成によれば、ステージ上に載置された基板について、吸引できない吸引孔を検出するとともに、当該吸引孔の近傍に位置する空孔が検出される。そして、当該空孔に挿入された吸着パッドが第1の方向に移動されることにより、当該基板は、吸着パッドに吸着させられる。その後、吸着パッドが第1の方向とは反対方向に移動されることにより、当該基板はステージに当接され、基板は空孔の各々によって吸引固定される。
【0009】
【発明の実施の形態】
A:第1実施形態
図1は、本実施形態に係る印刷装置100の構成図である。図1では、印刷装置100の構成要素を、それぞれの断面図により表した。
図1において、印刷装置100は、ステージ10上の基板(印刷物)1に対し、タンク81に格納される液体をヘッド82から吐出させて、基板1上にパターン印刷する。たとえば、印刷装置100を、有機EL(エレクトロルミネッセンス)表示装置に用いるディスプレイ基板の製造装置として用いる場合、液体として、発光材料を有機溶媒で溶解した溶液をタンク81に格納しておく。そして、ステージ10上に載置したガラス基板(基板1)に対し、ヘッド82から当該溶液を液滴として吐出させて、当該ガラス基板上に発光層をパターン形成させていく。
【0010】
(印刷装置100の構成)
図1を用いて、印刷装置100の構成内容を説明する。制御部50は、印刷装置100の各部に駆動信号を供給して、装置各部を統括する。図1では具体的な制御線の表示は省略した。
ポンプ60は、接続される配管12,24について、それぞれ独立に吸引できるように構成されている。ここで、配管12,24の先が塞がれた状態にあれば、ポンプ60の吸引力により配管12,24内の気圧を下げていくことができる。
【0011】
図2は、ステージ10の斜視図である。ステージ10は、その中央部分に、基板1を載置するための領域10Aを備えている。領域10Aには、吸引孔11が複数(たとえば30個)設けられており、各々の吸引孔11は、ステージ10の下方部で配管12と接続されている。領域10Aに平坦な基板1が載置された場合、吸引孔11の各々によって、当該基板1をステージ10上に吸引固定することができるようになっている。
また、領域10Aには、吸着ユニット29(後述)が挿入される空孔19も設けられている。
【0012】
図3は、補助プレート20の斜視図である。補助プレート20は、ステージ10の真下に位置しており、リフト(昇降装置)40に取り付けられている。補助プレート20は、リフト40の駆動により、その上下位置が移動する。これにより、補助プレート20とステージ10との距離が遠近する。リフト40には位置センサが取り付けられており、補助プレート20の高さ位置を示すセンサ信号を制御部50に出力する。
補助プレート20は、ステージ10の空孔19に対応する位置のそれぞれに吸着ユニット29が設けられている。本実施形態においては、図3に示すように、補助プレート20は、その四隅位置および中央位置の5箇所に、吸着ユニット29を備えている。
【0013】
吸着ユニット29は、ジャバラ23と吸着パッド21を接続した構成である。また、各々の吸着ユニット29のジャバラ23の下方部は、配管24と接続されている。
吸着パッド21は、シリコンで構成されており、その先端である開口部21Aは、基板1の底面と密着しやすくなるように、広がりをもたせた形状になっている。また、ジャバラ23は、その形状を自在に伸縮することができる部材である。
ここで、ジャバラ23の伸縮は方向を問わず、また、ジャバラ23と吸着パッド21とはローリングにより接続される。これにより、開口部21Aの面の向きは自在に変化することができるようになっている。
【0014】
(配管構成について)
図1に戻り、印刷装置100の配管構成について説明する。印刷装置100は、配管12および吸引孔11により構成される第1の配管ルートと、配管24および吸着ユニット29により構成される第2の配管ルートを備えている。そして、それぞれの配管ルートは、ポンプ60により、独自に吸引することができるように構成されている。
【0015】
はじめに、第1の配管ルートについて説明する。反りのない平坦な基板1をステージ10に載置した場合、基板1の底面によって吸引孔11のすべてが塞がれた状態になる。この状態においては、ポンプ60の吸引力により、配管12内の気圧を低く変化させることができるから、これにより、基板1をステージ10上に固定することができる。
一方、反りのある平坦でない基板1をステージ10上にそのまま載置した場合は、基板1の底面によって吸引孔11のすべては塞がれた状態にならないから(図1参照)、ポンプ60の吸引力によっては、配管12内の気圧を低く変化させることができず、基板1をステージ10上に固定することはできない。
【0016】
次に、第2の配管ルートについて説明する。吸着ユニット29をステージ10の空孔19に挿入するようにして上昇させていくと(第1の方向への移動)、吸着パッド21の開口部21Aが、基板1の底面で塞がれていき、結果、すべての開口部21Aが基板1の底面で塞がれた状態になる。この状態においては、ポンプ60の吸引力により、配管24内の気圧を低く変化させることができるから、これにより、基板1を吸着ユニット29に吸着させることができる。
【0017】
(動作)
このような印刷装置100を用いて、反りのある平坦でない基板1がステージ10に載置された場合に、当該基板1を平坦な状態に固定する際の具体的な動作を説明する。
【0018】
図4は、この際の制御部50の制御内容を示すフローチャートである。
はじめに、制御部50は、吸着ユニット29を上昇(第1の方向に移動)させるべく、リフト40を駆動して補助プレート20を上限位置Aまで上昇させていく(ステップSa1)。この際、制御部50は、リフト40から出力される位置センサ信号の内容に基づきリフト40の制御を行う。上限位置Aについては予め定められる位置であり、すべての吸着ユニット29を基板1の底面に接触させることができる位置として定められる。
【0019】
図5および図6は、補助プレート20を上昇させた場合における、吸着ユニット29と、ステージ10上の基板1の関係を示したものである。
基板1と吸着ユニット29とが離間した初期状態(図5の状態)から、補助プレート20を上昇していくと、吸着ユニット29の吸着パッド21が、ステージ10の複数の空孔19にそれぞれ挿入するようにして上昇していき、ステージ10上の基板1に近づいていく。
そして、基板1が平坦に載置された部分に対し、吸着ユニット29が接触して、吸着パッド21の開口部21Aが基板1の底面により塞がれた状態となる(図6の状態)。基板1が平坦に載置されていない部分に対しては、吸着ユニット29はまだ接触することはできない。
【0020】
その後、補助プレート20をさらに上昇させていくと、すでに基板1に接触している吸着ユニット29のジャバラ23は、縮むように形状変化し、基板1をステージ10から離間させるように力を加える。一方、基板1に接触していなかった吸着ユニット29は、基板1の底面と接触する。
図7は、この段階における、吸着ユニット29と、ステージ10上の基板1との位置関係を示したものである。
【0021】
ここで、ジャバラ23の伸縮方向は問わないから、吸着パッド21の開口部21Aの面方向は自在の方向をとることができる。このため、基板1の底面が水平ではなかったとしても、かかる底面の向きに合わせるようにして、吸着パッド21の開口部21Aは基板1の底面に接触し、塞がれた状態になる。
このように、すべての吸着ユニット29の開口部21Aを基板1の底面で塞がれた状態にするために、制御部50は、補助プレート20を上限位置Aまで上昇させていくのである。言い方を換えると、すべての吸着ユニット29の開口部21Aが基板1の底面で塞がれた状態とするための補助プレート20の位置として、上限位置Aが定められている。
【0022】
図4に戻り、動作の説明を続ける。
このようにして、すべての吸着ユニット29の開口部21Aが塞がれた状態になると、制御部50は、配管24内の吸引を開始するよう、ポンプ60を駆動させる(ステップSa2)。この段階では、ポンプ60の吸引力により、配管24内の気圧を低く変化させていくことができから、これにより、吸着ユニット29の各々で基板1を吸着させた状態にすることができる。
【0023】
そして、制御部50は、吸着ユニット29の各々を下降(第1の方向とは反対の方向に移動)させるべく、リフト40を駆動し、補助プレート20を下限位置Bまで下降させていく(ステップSa3)。下限位置Bについては、ステージ10に基板1を当接するための位置として予め定められている。詳細は後述する。
この段階において、吸着ユニット29の開口部21Aは基板1を吸着した状態にあるから、補助プレート20の下降移動に伴い、吸着ユニット29のジャバラ23は、その形状を伸張させていく。あわせて、吸着ユニット29の吸着パッド21は、基板1をステージ10に引きつけるように力を加えていく。これにより基板1がステージ10に当接されることになる。
図8は、この段階における、吸着ユニット29と、ステージ10上の基板1との位置関係を示したものである。
【0024】
このように、すべての吸引孔11を基板1の底面で塞がれた状態(図8の状態)にするために、制御部50は、補助プレート20を下限位置Bまで下降させていくのである。言い方を換えると、基板1をステージ10に当接させて、すべての吸引孔11を基板1の底面で塞がれた状態とするための補助プレート20の位置として、下限位置Bが定められている。
【0025】
この後、制御部50は、配管12内の吸引を開始するよう、ポンプ60を駆動させる(図4:ステップSa4)。この段階では、ポンプ60の吸引力により、配管12内の気圧を低く変化させていくことができるから、基板1を、吸引孔11の各々により吸引固定することができる。
そして、制御部50は、ポンプ60を制御して、配管24の吸引を終了させる(ステップSa5)。これにより、吸着ユニット29の開口部21Aで基板1を吸着していた状態が開放され、伸張状態にあったジャバラ23がもとの形状に戻る(上掲図5の状態)。
【0026】
このように、本実施形態に係る印刷装置100によれば、反りを有する基板1がステージ10上に載置された場合であっても、基板1はステージ10に当接させられた上で、平坦な状態として固定される。基板1をステージ10に当接させるように機能する吸着ユニット29は、基板1に対して複数の位置に設置されており(上述実施形態においては四隅位置と中央位置の5箇所)、基板1の反りの位置によらず、ステージ10に基板1を平坦に固定することができる。
【0027】
B:第2実施形態
図9は、第2実施形態に係る印刷装置500の構成図である。上述した印刷装置100と同じ構成要素には同じ符号を付している。
上述第1実施形態に係る印刷装置100では、ステージ10上に載置した基板1を平坦に固定するために、すべての吸着ユニット29を用いて基板1をステージ10上に引きつける制御をした。これに対し、本実施形態に係る印刷装置500では、すべての吸着ユニット29を用いるのではなく、基板1が平坦に載置されていない部分の近傍にある吸着ユニット29のみを用いる点に特徴がある。
【0028】
印刷装置500は、基板1がステージ10上に載置されると、当該基板1の底面によって吸引孔11が塞がれた状態にあるか否かを検出する。検出の際には、ポンプ60により吸引孔11を吸引した際に、基板1を吸引することができなかった吸引孔11、すなわちエアー漏れのあった吸引孔11を検出することによって行う。そして、エアー漏れのあった吸引孔11に近隣する空孔19に挿入される吸着ユニット29を用いて、基板1をステージ10に当接させ、基板1をステージ10上に固定していくのである。
【0029】
以下、印刷装置500の構成のうち、上述した印刷装置100と異なる部分について説明する。
図9において、吸着ユニット29に接続される配管24は、それぞれ並列にポンプ60に取り付けられている。これにより、吸着ユニット29ごとに、ポンプ60の吸引力を用いて基板1を吸着することができる。
また、吸着ユニット29ごとに、補助プレート20およびリフト40が用意されている。これにより、制御部50の制御下、吸着ユニット29ごとに位置制御することができるようになっている。
【0030】
また、ステージ10に設けられる吸引孔11のそれぞれには、圧力センサ11Sが設けられている。圧力センサ11Sは、各々の吸引孔11の内側の位置に設けられており、吸引孔11内側における気圧を測定する。
ポンプ60の吸引力で各々の吸引孔11を吸引していくと、基板1の底面で塞がれた吸引孔11には外気が入り込まないから、当該吸引孔11における気圧は小さくなる。一方、基板1の底面で塞がれない吸引孔11については、外気が入り込むから、当該吸引孔11における気圧は大きくなる(例えば大気圧と同じになる)。気圧センサ11Sの各々は、気圧を測定するとともに、その結果を示すセンサ信号を制御部50に出力する。
ここで、配管12には、吸引孔11に対応させて逆流防止バルブ11Bを取り付けている。これにより、個々の吸引孔11からポンプ60に向かう方向でのみ気体が流れることになり、気圧が高い旨を示すセンサ信号が出力された気圧センサ11Sに係る吸引孔11について、エアー漏れが発生しており、基板1を吸引することができていない旨を検出することができる。
【0031】
次に、印刷装置500において、反りのある平坦でない基板1がステージ10に載置された場合において、当該基板1をステージ10上に平坦に固定する際の、具体的な動作の内容を説明する。
図10は、この際の、制御部50の制御内容を示すフローチャートである。
はじめに、制御部50は、ポンプ60を駆動し、配管12について吸引を開始させる(ステップSb1)。そして、個々の吸引孔11に設けた気圧センサ11Sから出力されるセンサ信号の内容に基づき、吸引孔11の各々について、基板1の底面により塞がれた状態(エアー漏れのない状態)であるか、塞がれない状態(エアー漏れのある状態)であるかを判別する。そして、制御部50は、エアー漏れのある吸引孔11があったときには(ステップSb2:YES)、駆動する吸着ユニット29について決定する(ステップSb3)。
【0032】
ここで、駆動する吸着ユニット29の決定手順について説明する。
図11は、ステージ10の全体図であり、各々の吸引孔11に設けた気圧センサ11Sに係るセンサ信号の内容を対応付けて図示したものである。図11では、図面左下に位置する吸引孔11−1,11−2,11−3についてエアー漏れがあったことを想定し、便宜上、これらの吸引孔11−1,11−2,11−3について黒く塗りつぶして図示した。
この場合、制御部50は、吸引孔11−1,11−2,11−3の近傍に位置する空孔19−1に挿入される吸着ユニット29を駆動するように決定する。ここで、エアー漏れのあった吸引孔11と駆動すべき吸着ユニット29との対応関係は、予め最適な関係が求められており、制御部50のメモリ(図示せず)に格納されている。
【0033】
駆動する吸着ユニット29を決定した後の制御部50の制御内容は、上述第1実施形態の内容と略同一であるため、以下に簡単に説明する。
制御部50は、駆動することを決定した吸着ユニット29を上昇(第1の方向に移動)させるべく、対応するリフト40を駆動させて、補助プレート20を上限位置Aまで上昇させる(ステップSb4)。次いで、制御部50は、配管24を吸引するようにポンプ60を駆動する(ステップSb5)。このようにして、制御部50は、決定した吸着ユニット29を上昇(第1の方向に移動)させて、当該吸着ユニット29で基板1を吸着させていく。
その後、制御部50は、基板1を吸着させた吸着ユニット29を下降(第1の方向と反対の方向に移動)させるべく、対応するリフト40を駆動させて、補助プレート20を下限位置Bまで下降させる(ステップSb6)。
【0034】
次に、制御部50は、各々の吸引孔11の気圧センサ11Sから出力されるセンサ信号の内容から、エアー漏れがある吸引孔11が存在するかどうかを判別する(ステップSb7)。エアー漏れがない場合は(ステップSb7:NO)、制御部50は、吸引孔11の各々により基板1がステージ上に吸引固定できた旨を判断し、配管24の吸引を終了させる(ステップSb8)。
一方、エアー漏れのある吸引孔11が未だ存在する場合は(ステップSb7:YES)、かかる吸引孔11の位置に近接する空孔19に挿入される吸着ユニット29について駆動し、上述した制御を繰り返し行うことで、基板1をステージ10に当接させるようにしていく。
【0035】
このようにして、本実施形態に係る印刷装置500によれば、反りのある平坦でない基板1が載置された際に、基板1のうち平坦でない部分(吸引孔11についてエアー漏れのあった場所)を検出した上で、検出場所と近接した空孔19に挿入される吸着ユニット29を駆動していく。そして、上述第1実施形態と同様に該吸着ユニット29で基板1を吸着させた後、吸着した基板1をステージ10に当接させて、吸引孔11の各々によって固定していく。本実施形態に係る印刷装置500によれば、基板1ごとに駆動する吸着ユニット29を決定していくので、基板1の個々の反りの状況により対応して基板1をステージ10上に固定していくことができる。
【0036】
C:変形例
上述した各実施形態は、発明の内容を説明するための便宜上のものであり、任意に変形をすることができる。
たとえば、吸着ユニット29を設ける位置や数については任意に変形可能である。上述した各実施形態では、四隅と中央の5箇所に設けたが、さらに多くの吸着ユニット29を設けるようにし、基板1が多面的な反っていたような場合であっても平坦固定できるようにしてもよい。
【0037】
また、上述した各実施形態では、ポンプ60がそれぞれ独立に配管12、配管24を吸引できる構成としたが、配管ごと複数のポンプを設ける構成にしてもよい。また、ポンプ60は1の配管を吸引できる構成とし、複数のバルブを設けることによって、複数の配管ルートを構成するようにしてもよい。この場合は、制御部50によりバルブの開閉制御を行うことになる。
【0038】
また、上述した各実施形態では、補助プレート20を予め決められるA位置まで上昇させた後、配管24の吸引を開始して、吸着ユニット29で基板1を吸着させていた。これに対して、はじめに配管24の吸引を開始しておき、吸着ユニット29で基板1を吸着できる状態になるまで、補助プレート20を上昇させるように制御してもよい。この場合、A位置は上限リミット位置となり、A位置まで補助プレート20を上昇させても吸着ユニット29が吸着しない場合は、その後の動作は行わないように制御してもよい。すなわち、この場合は、基板1の反りが大きすぎる場合や、印刷装置100の動作自体に不具合が発生した場合に該当するから、その後の動作を停止するよう制御するのである。一方、上限リミット位置までの間で、吸着ユニット29で基板1を吸着できた場合には、上述実施形態と同様の制御を行い、ステージ10に基板1の当接させることによって、吸引孔11の各々により基板1をステージ上に吸引固定することができる。
【0039】
以上、本発明に係る基板固定装置を印刷装置として用いる例を示したが、本発明はこれに限定されるものではなく、有機EL表示装置以外の表示装置(たとえば、液晶表示装置、プラズマ表示装置など)の製造工程においても、それらの平板状基板を固定して所望の加工、処理を行う場合に用いることができる。
【図面の簡単な説明】
【図1】第1実施形態に係る印刷装置100の構成図である。
【図2】ステージ10の斜視図である。
【図3】補助プレート20の斜視図である。
【図4】印刷装置100の動作内容を示すフローチャートである。
【図5】吸着ユニット29と基板1との位置関係を示す図である。
【図6】吸着ユニット29と基板1との位置関係を示す図である。
【図7】吸着ユニット29と基板1との位置関係を示す図である。
【図8】吸着ユニット29と基板1との位置関係を示す図である。
【図9】第2実施形態に係る印刷装置500の構成図である。
【図10】印刷装置500の動作内容を示すフローチャートである。
【図11】印刷装置500の制御内容を説明するための図である。
【符号の説明】
10…ステージ
11…吸引孔
12…配管
19…空孔
20…補助プレート
21…吸着パッド
23…ジャバラ
24…配管
29…吸着ユニット
40…リフト
50…制御部
60…ポンプ
100…印刷装置
11S…吸着センサ
500…印刷装置
Claims (6)
- 複数の吸引孔および複数の空孔を有するステージに基板を固定する基板固定方法であって、
前記空孔の各々に挿入された吸着ユニットを第1の方向に移動させて、前記ステージに載置された基板を離間させる過程と、
離間した状態の基板を前記吸着ユニットの各々に吸着させる過程と、
前記吸着ユニットを、前記第1の方向とは反対方向に移動させて、前記基板を前記ステージに当接させる過程と、
前記ステージ上に当接させた基板を、前記複数の吸引孔で吸引する過程と
を有することを特徴とする基板固定方法。 - 複数の吸引孔および複数の空孔を有するステージに基板を固定する方法であって、
前記ステージに載置された基板を前記複数の吸引孔で吸引することを開始する過程と、
前記複数の吸引孔の各々が、前記基板を吸引しているか否かを判別する過程と、
前記複数の吸引孔のうち、当該判別結果が否定的となる吸引孔の近傍に位置する空孔を検出する過程と、
当該検出した空孔に挿入された吸着ユニットを第1の方向に移動させて、前記基板を吸着させる過程と、
前記基板を吸着した吸着ユニットを、前記第1の方向とは反対方向に移動させて、前記基板を前記ステージに当接させる過程と
を有することを特徴とする基板固定方法。 - 複数の吸引孔および複数の空孔を有するステージと、
前記複数の空孔の各々に挿入される吸着ユニットと、
前記吸着ユニットを第1の方向に移動させて、前記ステージに載置された基板を吸着するとともに、前記吸着ユニットを前記第1の方向とは反対方向に移動させて、前記基板を前記ステージに当接させるリフトと
を備えることを特徴とする基板固定装置。 - 請求項3に記載の基板固定装置と、
前記ステージの上方から前記基板に対して液滴を吐出することにより当該基板上に印刷をするヘッドと
を備えることを特徴とする印刷装置。 - 請求項4に記載の印刷装置において、
前記液滴は、有機EL(エレクトロルミネッセンス)材料を含む溶液であること
を特徴とする印刷装置。 - 請求項1または請求項2のいずれかに記載の基板固定方法を用いて表示装置を製造する表示装置製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002343955A JP4131164B2 (ja) | 2002-11-27 | 2002-11-27 | 基板固定方法および表示装置製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002343955A JP4131164B2 (ja) | 2002-11-27 | 2002-11-27 | 基板固定方法および表示装置製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004179399A true JP2004179399A (ja) | 2004-06-24 |
| JP2004179399A5 JP2004179399A5 (ja) | 2005-10-20 |
| JP4131164B2 JP4131164B2 (ja) | 2008-08-13 |
Family
ID=32705612
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002343955A Expired - Fee Related JP4131164B2 (ja) | 2002-11-27 | 2002-11-27 | 基板固定方法および表示装置製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4131164B2 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20060054514A (ko) * | 2004-11-16 | 2006-05-22 | 삼성전자주식회사 | 건식 식각 장치 |
| KR100607365B1 (ko) | 2004-12-30 | 2006-08-01 | 동부일렉트로닉스 주식회사 | 진공 흡착식 승강 핀을 구비하는 웨이퍼 지지 장치 |
| JP2007320124A (ja) * | 2006-05-31 | 2007-12-13 | Sharp Corp | 被加工脆性板の切断装置および切断方法 |
| JP2010226039A (ja) * | 2009-03-25 | 2010-10-07 | Oki Semiconductor Co Ltd | ウエハ保持装置、半導体製造装置およびウエハ吸着方法 |
| JP2010249936A (ja) * | 2009-04-13 | 2010-11-04 | Hitachi High-Technologies Corp | 実装処理作業装置及び実装処理作業方法 |
| JP2011199218A (ja) * | 2010-03-24 | 2011-10-06 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびそれを用いた基板検査システム |
| JP2012206476A (ja) * | 2011-03-30 | 2012-10-25 | Seiko Epson Corp | 印刷装置 |
| CN104058278A (zh) * | 2013-03-22 | 2014-09-24 | 大日本网屏制造株式会社 | 板状被搬送物的传送方法、传送装置及图案形成装置 |
| KR20140119993A (ko) * | 2013-04-01 | 2014-10-13 | 삼성디스플레이 주식회사 | 기판 고정 장치 및 그 방법 |
| KR101599812B1 (ko) * | 2014-10-24 | 2016-03-07 | 제너셈(주) | 반도체패키지의 흡착고정수단 |
| WO2017110467A1 (ja) * | 2015-12-25 | 2017-06-29 | 三星ダイヤモンド工業株式会社 | 基板吸着装置 |
| JP2018190815A (ja) * | 2017-05-01 | 2018-11-29 | 日本特殊陶業株式会社 | 真空吸着部材 |
| KR20200006008A (ko) * | 2018-07-09 | 2020-01-17 | 아이메카테크 가부시키가이샤 | 기판 조립 장치 및 기판 조립 방법 |
| KR102161527B1 (ko) * | 2019-06-11 | 2020-10-05 | 세메스 주식회사 | 스테이지 유닛 및 이를 포함하는 다이 본딩 장치 |
| JP6836003B1 (ja) * | 2020-08-27 | 2021-02-24 | 信越エンジニアリング株式会社 | ワーク分離装置及びワーク分離方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI645913B (zh) * | 2016-11-10 | 2019-01-01 | 辛耘企業股份有限公司 | 液體製程裝置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0312948A (ja) * | 1989-06-12 | 1991-01-21 | Nikon Corp | 基板ホルダ |
| JPH05190414A (ja) * | 1992-01-17 | 1993-07-30 | Nikon Corp | 基板吸着装置 |
| JPH069844U (ja) * | 1992-07-13 | 1994-02-08 | 大日本スクリーン製造株式会社 | 基板搬送ステージおよびそれを用いたロールコータ |
| JP2000100913A (ja) * | 1998-09-21 | 2000-04-07 | Canon Inc | 板状体の吸着装置及びその制御方法 |
| JP2001267271A (ja) * | 2000-03-22 | 2001-09-28 | Yoshioka Seiko:Kk | 吸着装置 |
-
2002
- 2002-11-27 JP JP2002343955A patent/JP4131164B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0312948A (ja) * | 1989-06-12 | 1991-01-21 | Nikon Corp | 基板ホルダ |
| JPH05190414A (ja) * | 1992-01-17 | 1993-07-30 | Nikon Corp | 基板吸着装置 |
| JPH069844U (ja) * | 1992-07-13 | 1994-02-08 | 大日本スクリーン製造株式会社 | 基板搬送ステージおよびそれを用いたロールコータ |
| JP2000100913A (ja) * | 1998-09-21 | 2000-04-07 | Canon Inc | 板状体の吸着装置及びその制御方法 |
| JP2001267271A (ja) * | 2000-03-22 | 2001-09-28 | Yoshioka Seiko:Kk | 吸着装置 |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20060054514A (ko) * | 2004-11-16 | 2006-05-22 | 삼성전자주식회사 | 건식 식각 장치 |
| KR100607365B1 (ko) | 2004-12-30 | 2006-08-01 | 동부일렉트로닉스 주식회사 | 진공 흡착식 승강 핀을 구비하는 웨이퍼 지지 장치 |
| JP2007320124A (ja) * | 2006-05-31 | 2007-12-13 | Sharp Corp | 被加工脆性板の切断装置および切断方法 |
| JP4486943B2 (ja) * | 2006-05-31 | 2010-06-23 | シャープ株式会社 | 被加工脆性板の切断装置および切断方法 |
| JP2010226039A (ja) * | 2009-03-25 | 2010-10-07 | Oki Semiconductor Co Ltd | ウエハ保持装置、半導体製造装置およびウエハ吸着方法 |
| JP2010249936A (ja) * | 2009-04-13 | 2010-11-04 | Hitachi High-Technologies Corp | 実装処理作業装置及び実装処理作業方法 |
| JP2011199218A (ja) * | 2010-03-24 | 2011-10-06 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびそれを用いた基板検査システム |
| JP2012206476A (ja) * | 2011-03-30 | 2012-10-25 | Seiko Epson Corp | 印刷装置 |
| CN104058278B (zh) * | 2013-03-22 | 2016-09-21 | 斯克林集团公司 | 板状被搬送物的传送方法、传送装置及图案形成装置 |
| KR101574877B1 (ko) * | 2013-03-22 | 2015-12-04 | 가부시키가이샤 스크린 홀딩스 | 판형상 피반송물의 수도 방법, 수도 장치 및 패턴 형성 장치 |
| CN104058278A (zh) * | 2013-03-22 | 2014-09-24 | 大日本网屏制造株式会社 | 板状被搬送物的传送方法、传送装置及图案形成装置 |
| KR20140119993A (ko) * | 2013-04-01 | 2014-10-13 | 삼성디스플레이 주식회사 | 기판 고정 장치 및 그 방법 |
| KR102171583B1 (ko) * | 2013-04-01 | 2020-10-30 | 삼성디스플레이 주식회사 | 기판 고정 장치 및 그 방법 |
| KR101599812B1 (ko) * | 2014-10-24 | 2016-03-07 | 제너셈(주) | 반도체패키지의 흡착고정수단 |
| WO2017110467A1 (ja) * | 2015-12-25 | 2017-06-29 | 三星ダイヤモンド工業株式会社 | 基板吸着装置 |
| JPWO2017110467A1 (ja) * | 2015-12-25 | 2018-10-25 | 三星ダイヤモンド工業株式会社 | 基板吸着装置 |
| JP2018190815A (ja) * | 2017-05-01 | 2018-11-29 | 日本特殊陶業株式会社 | 真空吸着部材 |
| KR102307344B1 (ko) | 2018-07-09 | 2021-09-30 | 아이메카테크 가부시키가이샤 | 기판 조립 장치 및 기판 조립 방법 |
| KR20200006008A (ko) * | 2018-07-09 | 2020-01-17 | 아이메카테크 가부시키가이샤 | 기판 조립 장치 및 기판 조립 방법 |
| KR102161527B1 (ko) * | 2019-06-11 | 2020-10-05 | 세메스 주식회사 | 스테이지 유닛 및 이를 포함하는 다이 본딩 장치 |
| JP6836003B1 (ja) * | 2020-08-27 | 2021-02-24 | 信越エンジニアリング株式会社 | ワーク分離装置及びワーク分離方法 |
| KR102324688B1 (ko) * | 2020-08-27 | 2021-11-09 | 신에츠 엔지니어링 가부시키가이샤 | 워크 분리 장치 및 워크 분리 방법 |
| US11251058B1 (en) | 2020-08-27 | 2022-02-15 | Shin-Etsu Engineering Co., Ltd. | Workpiece-separating device and workpiece-separating method |
| JP2022039031A (ja) * | 2020-08-27 | 2022-03-10 | 信越エンジニアリング株式会社 | ワーク分離装置及びワーク分離方法 |
| TWI758210B (zh) * | 2020-08-27 | 2022-03-11 | 日商信越工程股份有限公司 | 工件分離裝置及工件分離方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4131164B2 (ja) | 2008-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004179399A (ja) | 基板固定方法、基板固定装置、印刷装置および表示装置製造方法 | |
| JP4033841B2 (ja) | 浮上式基板搬送処理方法及びその装置 | |
| JP4318714B2 (ja) | 塗布装置 | |
| JP5868228B2 (ja) | 基板保持装置及び基板保持方法 | |
| JP5259434B2 (ja) | 板取得装置及び板取得方法 | |
| JP4758432B2 (ja) | ワーク収納装置 | |
| JP2013191604A (ja) | 塗布装置 | |
| JP3960332B2 (ja) | 減圧乾燥装置 | |
| JPWO2003071599A1 (ja) | 基板吸着装置 | |
| KR20130090829A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| JP2010066666A (ja) | 液晶滴下装置 | |
| WO2013035854A1 (ja) | 密着露光装置及び密着露光方法 | |
| JP2008311466A (ja) | 基板保持装置および基板処理装置 | |
| JP2008211038A (ja) | 基板処理装置 | |
| JP5455189B2 (ja) | 基板貼り合わせ装置及び基板貼り合わせ方法 | |
| KR100832802B1 (ko) | 기판 처리 장치 및 그의 구동 방법 | |
| JPH10166236A (ja) | 板状ワークの位置決め装置およびこれを用いた板状ワークの加工システム | |
| JP2009049228A (ja) | ポンプおよび基板処理装置 | |
| JP2004172318A (ja) | ワークテーブル、ワーク搬送装置、液滴吐出装置、ワーク受け渡し方法、電気光学装置、電気光学装置の製造方法および電子機器 | |
| JP2009186872A (ja) | 載置テーブルおよび液状体吐出装置 | |
| JP4408786B2 (ja) | 減圧乾燥装置および減圧乾燥方法 | |
| JP5028195B2 (ja) | 基板処理装置および基板処理方法 | |
| JP2005109404A (ja) | 基板保持装置 | |
| JP4335786B2 (ja) | 減圧乾燥装置 | |
| JP3915613B2 (ja) | ウェハシート上のチップのピックアップ装置及びピックアップ方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050615 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070402 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080212 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080430 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080513 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110606 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110606 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120606 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |