JP2004122803A - 車両統合制御システム - Google Patents
車両統合制御システム Download PDFInfo
- Publication number
- JP2004122803A JP2004122803A JP2002285547A JP2002285547A JP2004122803A JP 2004122803 A JP2004122803 A JP 2004122803A JP 2002285547 A JP2002285547 A JP 2002285547A JP 2002285547 A JP2002285547 A JP 2002285547A JP 2004122803 A JP2004122803 A JP 2004122803A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- coordinator
- manager
- control
- ecu
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/321—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/08—Failure or malfunction detecting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/80—Detection or control after a system or component failure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2260/00—Interaction of vehicle brake system with other systems
- B60T2260/08—Coordination of integrated systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/30—Auxiliary equipments
Abstract
【解決手段】車内通信ネットワークと、車内通信ネットワークに接続され、車両の複数の機能要素の少なくとも1つの動作を制御するプログラムを有する複数のECUと、これら制御プログラムの複数に車内通信ネットワークを通じてまたはプロセス間通信によって動作指令を送信する車両コーディネータ101とを備えた車両統合制御システムにおいて、これら制御プログラムは、受信した動作指令にもとづいて当該機能要素の動作を制御し、車両コーディネータ101は、動作指令を送信する対象の複数の制御プログラムのうち、緊急に車両を停止できるブレーキ制御プログラム104を有するABSECU100に含まれる。
【選択図】 図4
Description
【発明の属する技術分野】
本発明は、車内通信ネットワークを用いて車両の複数の機能要素を統合制御し、この車内通信ネットワークに不全があっても緊急の危険回避が可能な車両統合制御システムに関するものである。
【0002】
【従来の技術】
従来、車両の機能を構成する複数の機能要素全体を統合的に制御するシステムが提案されている。この統合制御のシステムは、車両の機能別に制御機能を分割し、さらにこの分割された各制御機能間の調整を行うマネージャを配するものである(例えば、特許文献1参照。)。
【0003】
このマネージャは、例えば、車両全体の車両軸トルクを調整するために、機能要素であるエンジンおよびAT(自動変速機)の制御機能としてのエンジンECUおよびATECUの制御を調整する、特別なマネージャECUとして実現される(例えば、特許文献2参照。)。
【0004】
この例においては、エンジンECUおよびATECUがエンジンおよびATの特性情報をマネージャECUに送信し、マネージャECUは受信した特性情報にもとづいて車両軸トルクを目標値にするために必要な指令をエンジンECUおよびATECUに送信する。そしてエンジンECUおよびATECUはこの指令に基づいてエンジンおよびATを制御し、それによって車両軸トルクが目標値に達する。
【0005】
上記のように、マネージャは車両の制御機能の上位にあり、またこれら制御機能の調整を行うための制御ロジック、例えばソフトウェアとして実現される。したがって、マネージャ自体の実現には、固有な特別のセンサ、アクチュエータ等のハードウェアといったものは必要ではない。それゆえ、マネージャは必ずしも上記したようにその機能に特化したマネージャECUとして実現される必要はなく、例えばエンジンECU内のソフトウェアとして実現されていてもよい。
【0006】
【特許文献1】
特開2000−71819号公報
【0007】
【特許文献2】
特開2002−81345号公報
【0008】
【発明が解決しようとする課題】
上記したエンジンECUのみならず、マネージャは、車両を統合制御するための各ECUが通信を行うためのネットワーク内のECUであれば、どのECU内のソフトウェアとして実現されていてもよい。
【0009】
しかしこのような場合、上記した通信ネットワークにおいて断線等の通信不能状態が発生すると、制御機能としての各ECUとマネージャの通信が途絶し、適切な統合制御が行えなくなることがある。
【0010】
例えば、上記の様にマネージャ(コーディネータ)をエンジンECUに実装した場合の車両統合制御のシステムについて説明する。図12は、この車両統合制御システムにおける、エンジンECU50およびABS(アンチロックブレーキシステム)ECU60の構成図である。ABSECU60は、車両の機能要素としてのABSの制御機能である。エンジンECU50およびABSECU60は、TTP(Time triggered protocol)によるシリアル通信線49のネットワークを介して互いに通信できるようになっている。シリアル通信線49は2重化されている。
【0011】
エンジンECU50は、ドライバ/レシーバIC51、プロトコルIC52およびマイクロコンピュータ(以下マイコンと記す)53を有し、ABSECU60は、ドライバ/レシーバIC61、プロトコルIC62およびマイコン63を有している。
【0012】
ドライバ/レシーバIC51または61は、シリアル通信線49から受信した電気信号をプロトコルIC52、62内部で扱えるデジタルデータに変換してプロトコルIC52または62に出力する。またドライバ/レシーバIC51または61はプロトコルIC52または62から入力されたディジタルデータを電気信号に変換してシリアル通信線49に出力する。
【0013】
プロトコルIC52または62はドライバ/レシーバIC51または61から入力されたデータを、使用している通信プロトコルのフレームフォーマットに従って加工し、通信プロトコルに依存しない形式のデータに変換した後、マイコン53または63に出力する。またプロトコルIC52または62は、マイコン53または63から入力されたデータに、使用している通信プロトコルに適合するように、IDやCRCを付加する等フレームフォーマットの加工を施した後、ドライバ/レシーバIC51または61に出力する。
【0014】
マイコン53または63は、図示しないCPU、RAM、フラッシュメモリを有する。CPUは、フラッシュメモリに保存されているプログラム(ソフトウェア)を読み出して実行することで各種処理を行う。またマイコン53または63はこの処理の必要に応じて、RAMに対してデータの書き込み/読み出しを行い、また、他のECUとの通信の必要があれば、プロトコルICからの入力、送信のためのデータの出力を行う。
【0015】
マイコン53および63のフラッシュメモリ中には、各種プログラムが保存されている。具体的には、マイコン53のフラッシュメモリ中にはマネージャとしての車両コーディネータ54およびエンジンコントローラ55が保存されており、マイコン63のフラッシュメモリ中にはABSコントローラ64が保存されている。これらのプログラムは、エンジンECU50およびABSECU60の起動と共に実行が開始されるようになっている。なお、車両コーディネータ54とエンジンコントローラ55は同一CPUによって別プロセスとして同時に実行される。
【0016】
本明細書では以降、簡単のために、マイコンのCPUがプログラムを実行する処理を、そのプログラム自体が行う処理であるとして説明を行う。例えば「マイコン53のCPUがエンジンコントローラ55を読み出して実行する処理」という記載を「エンジンコントローラ55が実行する処理」として記載する。
【0017】
ABSコントローラ64は、車輪速センサ(図示せず)からマイコン63に入力される車輪速情報をもとに、車輪がロック状態とならないように制動力を調整するための処理を行う。またここでは、ABSコントローラ64はシリアル通信線49を介して車両コーディネータ54から制動力についての指令を受信し、それにもとづいて制動力を調整する処理も行う。
【0018】
車両コーディネータ54は、エンジンコントローラ55およびABSコントローラ64等の制御機能間の調整を行い、またこれらに対して指令を行う。
【0019】
エンジンコントローラ55は、車両コーディネータ54からの指令にもとづいてエンジンの燃料噴射、点火、および吸入空気量の調整、検出等の処理を行う。
【0020】
なお、車両コーディネータ54とABSコントローラ64、あるいは図示しない他の制御機能のノード間の通信は、シリアル通信線49を介して行われ、車両コーディネータ54とエンジンコントローラ55の間のノード内通信はプロセス間通信によって行われる。
【0021】
例えばこのようなシステムにおいて、緊急に車両の走行を停止するために、車両コーディネータ54がABSコントローラ64にブレーキ作動の指令を送信する場面を考える。緊急に車両の走行を停止する場面の発生原因としては、たとえばエンジンコントローラ55がエンジンの吸入空気量の異常を検出し、この異常を車両コーディネータ54に送信し、車両コーディネータ54がこの受信にもとづいて車両停止の指令をABSコントローラ64に送信するという場合が考えられる。
【0022】
このような場面において、シリアル通信線49が通常の状態であれば、ABSコントローラ64はこの指令を受信し、この指令に基づいてABSを作動させることができる。すなわち、緊急時に車両を停止することができる。
【0023】
しかし、シリアル通信線49の一部が断線している、あるいはドライバ/レシーバIC51、プロトコルIC52、ドライバ/レシーバIC61、およびプロトコルIC62といったECU内の通信機能を担う装置が故障している等の、ネットワークの不全が発生すると、車両コーディネータ54の指令がABSコントローラ64に届かない場合がある。すなわち、ABSコントローラ64は車両コーディネータ54の指令に基づくブレーキの作動を行えなくなる場合がある。
【0024】
この際、車両コーディネータ54はエンジンを停止するようエンジンコントローラ55に指令を送信することで、エンジンコントローラ55にエンジンの燃料噴射および点火を停止させることができる。しかし、このようにしたとしても、車両はエンジンブレーキによって徐々に減速するのみの効果しか果たさない。したがって、エンジンは緊急に車両の走行を停止する機能を有していない。
【0025】
車両の走行を緊急に停止する機能は、車両の緊急時の危険回避に繋がる。車両の緊急時の危険回避に繋がる他の機能としては、例えばオルタネータによる過電流等を防ぐための電力供給の制御等がある。
【0026】
本発明は上記点に鑑みて、マネージャによる車内通信ネットワークを通じて車両の機能の統合制御を行うシステムにおいて、車内通信ネットワークが不全の場合においても緊急時の危険回避ができるようにすることを目的とする。
【0027】
【課題を解決するための手段】
上記目標を達成するための、請求項1に記載の発明は、車内通信ネットワークに接続され、車両の複数の機能要素の少なくとも1つの動作を制御する制御手段を有するノードを複数備え、更に制御手段の複数に動作指令を出力するマネージャを備え、また制御手段は、入力した動作指令にもとづいて当該機能要素の動作を制御し、マネージャは、動作指令を出力する対象の複数の制御手段のうち、緊急時に車両の危険を回避することのできる機能要素を制御する制御手段を有するノードの少なくとも1つに含まれ、さらにマネージャは、動作指令を出力する対象の複数の制御手段のうち、自らが含まれるノード以外のノードが有する制御手段には、車内通信ネットワークを介して動作指令を出力し、自らが含まれているノードが有する緊急時に車両の危険を回避することのできる機能要素を制御する制御手段には、ノード内通信によって動作指令を出力することを特徴とする車両統合制御システムである。
【0028】
これによって、マネージャによって車内通信ネットワークを通じて車両の機能の統合制御を行うシステムにおいて、車内通信ネットワークが不全の場合においても、マネージャはノード内通信によって緊急時に車両の危険を回避することのできる機能要素を制御する制御手段に指令を出力することができるので、緊急時の危険回避ができる。
【0029】
また、請求項2に記載の発明は、請求項1に記載の車両統合制御システムにおいて、マネージャは、動作指令を出力する対象の複数の制御手段のうち、緊急に車両の走行を停止することのできる機能要素を制御する制御手段を有するノードの少なくとも1つに含まれていることを特徴とする。
【0030】
これによって、マネージャによって車内通信ネットワークを通じて車両の機能の統合制御を行うシステムにおいて、車内通信ネットワークが不全の場合においても、マネージャはノード内通信によって緊急時に車両の走行を停止する機能要素を制御する制御手段に指令を出力することができるので、車両の緊急停止による緊急時の危険回避ができる。
【0031】
なお、緊急に車両の走行を停止することのできる機能要素は、緊急時に車両の危険を回避することのできる機能要素の一部を成す概念である。
【0032】
また、請求項3に記載の発明は、請求項2に記載の車両統合制御システムにおいて、マネージャは、複数のノードの内、ブレーキを制御する制御手段を有するノードに含まれていることを特徴とする。
【0033】
また、請求項4に記載の発明は、請求項1に記載の車両統合制御システムにおいて、マネージャは、動作指令を出力する対象の複数の制御手段のうち、車両の機能要素への電流供給を制限することのできる機能要素を制御する制御手段を有するノードの少なくとも1つに含まれていることを特徴とする。
【0034】
これによって、マネージャによって車内通信ネットワークを通じて車両の機能の統合制御を行うシステムにおいて、車内通信ネットワークが不全の場合においても、マネージャはノード内通信によって複数の機能要素部の全てまたは一部への電流供給を制御する制御手段に指令を出力することができるので、供給電流の過多等の電流供給に係る危険回避ができる。
【0035】
なお、車両の機能要素への電流供給を制限することのできる機能要素は、緊急時に車両の危険を回避することのできる機能要素の一部を成す概念である。
【0036】
また、請求項5に記載の発明は、請求項4に記載の車両統合制御システムにおいて、マネージャは、複数のノードの内、オルタネータを制御する制御手段を有するノードに含まれていることを特徴とする。
【0037】
また、請求項6に記載の発明は、請求項1ないし5のいずれか1つに記載の車両統合制御システムにおいて、マネージャは、複数のノードの内、緊急時に車両の危険を回避することのできる機能要素を制御する制御手段を有するノードの少なくとも2つに含まれており、少なくとも2つのノードに含まれるマネージャのうち1つだけが一時期に作動し、作動するマネージャとして、緊急時に車両の危険を回避する機能がより高い機能要素を制御する制御手段を有するノードに含まれるものから順に優先的に用いられることを特徴とする。
【0038】
また、請求項7に記載の発明は、請求項1ないし5のいずれか1つに記載の車両統合制御システムにおいて、マネージャは、複数のノードの内、緊急時に車両の危険を回避することのできる機能要素を制御する制御手段を有するノードの少なくとも2つに含まれており、少なくとも2つのノードに含まれるマネージャのうち1つだけが一時期に作動し、作動中の1つのマネージャが機能不全となった場合には、作動中の1つのマネージャ以外の他のマネージャが代替作動することを特徴とする。
【0039】
【発明の実施の形態】
(第1実施形態)
図1に、本発明の第1実施形態に係る車両統合制御システムの制御体系図を示す。この図は、車両のエンジン、変速機、クラッチ、スタータ、オルタネータ、ABS、作動装置、4WD(4輪駆動)等の車両の機能要素の制御の構成を機能別に分解し、階層化したものである。
【0040】
車両の機能は、車両挙動、パワートレイン、電気的制御の3つに大別され、これら3つの機能間の調整を車両コーディネータが行う(レベル0:車両ドメイン)。すなわち、車両コーディネータは車両挙動、パワートレイン、電気的制御のそれぞれの機能についての情報を取得し、それら取得した情報にもとづいて車両全体の制御方針を決定し、この方針にもとづいて車両挙動、パワートレイン、および電気的制御の機能に対して各種作動内容の指令を出力する。制御方針としては、例えば目標車軸トルク等がある。
【0041】
上記した機能のそれぞれは、更に下位の機能に分割される。
【0042】
電気的制御は、オルタネータ制御、ボディ系制御の2つの機能に分割され、電気的コーディネータがこれら2つの機能間の調整を行う(レイヤ1:電気ドメイン)。すなわち、電気的制御コーディネータはオルタネータ制御から供給電流量の情報を受信し、ボディ系制御からは各種ボディ系機器の作動の情報を受信し、車両コーディネータから上限電流値等の指令を受信し、これら受信した情報および指令にもとづいて、オルタネータ制御およびボディ系制御に動作の指令を送信する。なお、ボディ系制御とは、パワーウィンドウ、ワイパー、エアコン、ドアロック等の制御の総称である。
【0043】
パワートレインはエンジン制御、AT制御、スタータ制御、推進力検知の4つの機能に分割され、パワートレインコーディネータがこれら4つの機能間の調整を行う(レイヤ1:パワートレインコーディネータ)。すなわち、パワートレインコーディネータは、推進力検知から車軸トルクの情報を受信し、また車両コーディネータから目標車軸トルク等の指令を受信し、これらの情報および受信にもとづいてエンジン制御、AT制御、スタータ制御に対してそれぞれ噴射・点火、変速、スタータオン/オフ等の指令を出力する。
【0044】
車両挙動は姿勢検知、車両安定性の2つの機能に分割され、車両挙動コーディネータがこれら2つの機能間の調整を行う(レイヤ1:車両挙動ドメイン)。すなわち、車両挙動コーディネータは、姿勢検知による車速、ヨーレート、直進加速、横加速等の情報を受信し、また車両コーディネータから指令を受信し、これにもとづいて車両安定性の機能に目標タイヤフォース(タイヤにかかる力)の指令を出力する。
【0045】
また、車両挙動コーディネータ、パワートレインコーディネータ、および電気的コーディネータのレイヤ1のコーディネータは、各ドメイン内の情報を上位のコーディネータである車両コーディネータに出力する。
【0046】
車両挙動ドメインの車両安定性の機能はさらに下位の機能に分割される。すなわち、車両安定性は、ステアリング制御、4WD制御、ABS制御、差動装置制御の4つに分割され、車両安定性コーディネータがこれら4つの機能間の調整を行う(レイヤ2:車両安定性ドメイン)。すなわち、車両安定性コーディネータは、車両挙動コーディネータから指令を入力し、この指令にもとづいてこれら4つの機能のそれぞれに対して指令を出力する。なお、この機能分割による階層化は1つの分類手法であり、必ずしも実装段階においてこのように車両の機能を分割する必要はなく、例えばボディ系制御は電気的制御コーディネータの下位にあるのではなく、別に設けられたボディ系コーディネータの下位にあってもよい。
【0047】
図2に、本実施形態においてこの統合制御システムを実現する車両1内の通信ネットワークの構成を概略的に示す。この通信ネットワークは、シリアル通信線10と、図1で説明した制御の構成を実現するための装置であるABSECU100、エンジンECU200、トランスミッションECU300、オルタネータECU400、ボディECU500を有している。これらのECUは、シリアル通信線10を介して通信データの授受を行うことができる。このように、これらECUはそれぞれが1つのノードとして通信ネットワークに接続している。
【0048】
なお、この通信ネットワーク内には、その他にもステアリングECU、4WDECU等の図示しないECUがそれぞれ1ノードとして接続している。
【0049】
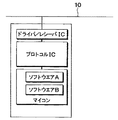
これらECUの基本的な構成は共通している。これらECUが共通して持つ構成を図3に示す。ECUは、ドライバ/レシーバIC、プロトコルIC、およびマイクロコンピュータ(以下マイコンと記す)を有している。
【0050】
ドライバ/レシーバICは、シリアル通信線10から受信した電気信号をECU内部で扱えるデジタルデータに変換してプロトコルICに出力する。またドライバ/レシーバICはプロトコルICから入力されたディジタルデータを電気信号に変換してシリアル通信線10に出力する。
【0051】
プロトコルICはドライバ/レシーバICから入力されたデータを、使用している通信プロトコルのフレームフォーマットに従って加工し、通信プロトコルに依存しない形式のデータに変換した後、マイコンに出力する。またプロトコルICはマイコンから入力されたデータに、使用している通信プロトコルに適合するように、IDやCRCを付加する等フレームフォーマットの加工を施した後、プロトコルICに出力する。なお、通信プロトコルとしては例えばCAN(Controller Area Network)を用いる。
【0052】
マイコンは、図示しないCPU、RAM、フラッシュメモリを有する。CPUは、フラッシュメモリに保存されているプログラムを読み出して実行することで各種処理を行う。またマイコンはこの処理の必要に応じて、RAMに対してデータの書き込み/読み出しを行い、また、他のECUとの通信の必要があれば、プロトコルICからの入力、送信のためのデータの出力を行う。
【0053】
マイコンのフラッシュメモリ中にはプログラムが保存されている。これらのプログラムは、ECUの起動と共に実行が開始されるようになっている。なお、CPUはフラッシュメモリ中の複数のソフトウェアをそれぞれ別プロセスとして実質上同時に実行することができる。そして、それぞれのプログラムはプロセス間通信によって情報、制御の授受を行うことができる。このプロセス間通信は、ノード内通信の一形態である。なおノード内通信は、他にもノード内のシリアル通信、マイコン内のタスク間通信、2マイコン間での通信を含む概念である。
【0054】
なお、プログラムは、1つのものを複数の部分に分割したり、あるいは複数のものを1つにまとめたりすることが非常に容易である。したがって、複数のプログラムがあるとされる場合であっても、それらのうちの任意の一部を1つのプログラムであると見なすことは可能である。その場合、まとめられた複数のプログラムの間の情報等の授受は、プログラム内部の通信ということになる。
【0055】
以上がそれぞれのECUに共通する構成である。この共通の構成に加え、個々のECUはそれぞれの機能に基づいたプログラムをフラッシュメモリに保存し、またそれぞれの制御機能を実現するためのセンサ、アクチュエータといった機能要素を備える。
【0056】
図4に、ABSECU100、エンジンECU200、トランスミッションECU300、オルタネータECU400、ボディECU500の構成を示す。なお、これらのECUは上記したような共通の構成を有しているが、図4においては簡単のために、それぞれのマイコン110、210、310、410、510が有しているプログラムの種類についてのみ詳細に図示する。
【0057】
マイコン310は、フラッシュメモリに変速制御プログラム301を有している。変速制御プログラム301は、図示しないATのシフトレンジ(P、R、N、D、またはL)等の情報を図示しないそれぞれのセンサからの入力により検知し、またパワートレインコーディネータ201から指令を受信する。変速制御プログラム301はこれらの情報の入力に基づいて、マイコン310に接続している各アクチュエータに制御信号を出力して車両の変速段を制御する。また変速制御プログラム301は、シフトレンジ、車速、変速段等の情報をパワートレインコーディネータ201に送信する。
【0058】
マイコン510は、フラッシュメモリにパワーウインドウ等制御プログラム501を有している。パワーウインドウ等制御プログラム501は、電気的制御コーディネータ401からの指令を受信し、受信した指令に基づいてマイコン510に接続している各アクチュエータに制御信号を出力してパワーウインドウ、ワイパー、ドアロック等の動作を制御する。
【0059】
マイコン210は、フラッシュメモリにパワートレインコーディネータ201およびエンジン制御プログラム202を有している。
【0060】
エンジン制御プログラム202は、スロットル開度、水温、エンジンの吸入空気量、シリンダ位置、点火等の情報をそれぞれのセンサからの入力により検知し、またパワートレインコーディネータ201からの指令にもとづいてマイコン210に接続している各アクチュエータに制御信号を出力することで、エンジンの燃料噴射、点火、吸入空気量、およびスタータのオン/オフ作動等を制御する。またエンジン制御プログラム202は、上記センサから取得した情報および各アクチュエータによる制御状態の情報をパワートレインコーディネータ201に出力する。
【0061】
パワートレインコーディネータ201は、車両コーディネータ101から目標車軸トルク等の駆動力に関する指令を受信し、この指令にもとづいてあらかじめ定められた規則により目標エンジントルク、目標変速段を決定し、この決定にもとづいてエンジンの燃料噴射量、点火タイミング、吸入空気量、変速段等の制御パラメータを決定し、このパラメータに沿った指令をエンジン制御プログラム202および変速制御プログラム301に送信する。またパワートレインコーディネータ201は、エンジン制御プログラム202等から受信した情報を車両コーディネータ101に送信する。
【0062】
マイコン410は、フラッシュメモリに電気的制御コーディネータ401および発電制御プログラム402を有しており、オルタネータに対して制御、情報の入出力を行えるようになっている。
【0063】
発電制御プログラム402は、電気的制御コーディネータ401から指令を入力し、この指令にもとづいてオルタネータの出力電流を制御する。
【0064】
電気的制御コーディネータ401は、車両コーディネータ101から電力供給の上限値、特定の機能要素の作動、停止等の指令を受信し、これにもとづいてパワーウインドウ等制御プログラム501、あるいは図示しない電動の機能要素の制御機能に対して作動、停止等の指令を出力し、また発電制御プログラム402に対してオルタネータの出力電流制御の指令を出力する。また電気的制御コーディネータ401は、パワーウインドウ等制御プログラム501から作動状態等の情報を入力し、この情報を車両コーディネータ101に送信する。
【0065】
マイコン110は、車両コーディネータ101、車両挙動コーディネータ102、車両安定性コーディネータ103、およびブレーキ制御プログラム104を有する。
【0066】
ブレーキ制御プログラム104は、車輪速センサ(図示せず)からの入力により車輪速情報を検知し、この情報にもとづいて車輪がロック状態とならないように制動力を調整するための処理を行う。またブレーキ制御プログラム104は、車両安定性コーディネータ103から制動力についての指令を入力し、それにもとづいてアクチュエータに制御信号を出力することで、ブレーキを制御する。ブレーキ制御としては例えば、アクチュエータとしての液圧ユニットに制御信号を出力して車輪のホイールシリンダー内の液圧を制御する。また車両安定性コーディネータ103は、車輪速、ブレーキ制御の状態等の情報を車両安定性コーディネータ103に出力する。
【0067】
車両安定性コーディネータ103は、車両挙動コーディネータ102から車両の安定性確保のための目標タイヤフォース等の指令を入力し、ブレーキ制御プログラム104から上記した情報を入力する。そして車両安定性コーディネータ103は、入力した情報にもとづいて、指令のタイヤフォースが実現するように操舵角、各輪駆動力、ブレーキトルク、差動比等の制御パラメータを決定し、このパラメータに基づいてブレーキ制御プログラム104に目標ブレーキトルクの指令を出力し、また図示しない4WD、差動装置、ステアリング等の制御機能に対して決定した車輪角、差動比、操舵角等の目標値の指令を出力する。また、ブレーキ制御プログラム104等から入力した情報を車両挙動コーディネータ102に出力する。
【0068】
車両挙動コーディネータ102は、車両コーディネータ101に対して車両の安定性確保等の挙動の最適化に必要な車軸トルクを要求する信号を出力する。また車両挙動コーディネータ102は、図示しない車両の姿勢を検知するECUからヨーレート、加速度等の姿勢情報を受信し、それにもとづいて車両安定性コーディネータ103に目標タイヤフォースの指令を出力する。
【0069】
車両コーディネータ101は、車両挙動コーディネータ102、パワートレインコーディネータ201、および電気的制御コーディネータ401と情報の授受を行っている。すなわち、車両挙動コーディネータ102から車両の挙動の最適化に必要な車軸トルクの情報を受信し、パワートレインコーディネータ201からエンジン制御プログラム202に関する情報等を受信し、電気的制御コーディネータ401から発電制御プログラム402、パワーウインドウ等制御プログラム501等に関する情報を受信する。そして車両コーディネータ101は、これら受信した情報をもとにパワートレインコーディネータ201に対して目標軸トルクの指令を送信し、電気的制御コーディネータ401に発電量の制限等の指令を出力する。
【0070】
図5は、この車両コーディネータ101の車軸トルクの指令の送信のための処理を概略的に示すフローチャートである。以下この図を用いて車両コーディネータ101の処理を説明する。
【0071】
車両コーディネータ101は、ステップ810で車両挙動コーディネータ102から車軸トルクの要求を入力する。そしてステップ820で電気的制御コーディネータ401からの情報送信を受信する。またこのとき、電気的制御コーディネータ401から車軸トルク要求があればそれも併せて受信する。
【0072】
そしてステップ830では、車両挙動コーディネータ102からの要求、および電気的制御コーディネータ401からの情報および要求にもとづいて、パワートレインコーディネータ201に対して指令する目標車軸トルクの計算を行う。この計算法は、あらかじめ車両コーディネータ101に設定されている。
【0073】
そしてステップ840では、この計算した目標車軸トルクの指令をパワートレインコーディネータ201に対して送信する。そしてステップ850では、後述する異常処理ルーチンを実行する。そしてこの異常処理ルーチンが終了すると、処理はステップ810に戻る。
【0074】
図6に、上記した異常処理ルーチンを示す。まずステップ910で、シリアル通信線10上の他のECUからの受信状態、およびこれらECUへの送信状態をチェックする。また、他のプログラムから車両を停止する必要があるような緊急事態を示す情報の受信をチェックする。緊急事態を示す情報とは、例えばトランスミッションECU300の故障の情報等である。
【0075】
次に、ステップ920でこれらをチェックした結果から、現在車両の状態が正常であるか否かを判定する。車両の状態が正常であるとは、他のECUとの送受信が正常に行えており、かつ他のプログラムから緊急事態を示す情報を受信していない場合である。
【0076】
正常であると判定すると異常処理ルーチンはそのまま終了する。正常でないと判定すると、車両コーディネータ101は車両の走行を止めるための処理を行う。すなわち、ステップ930でパワートレインコーディネータ201に対して車両停止のために安全な値の目標車軸トルクの指令を送信する。これにより、パワートレインコーディネータ201はエンジン制御プログラム202に対してエンジンの点火、噴射を停止する制御を行う旨の指令を出力する。
【0077】
そしてさらにステップ940で、車両挙動コーディネータ102に対して車両を停止させる旨の指令を出力する。これによって、車両挙動コーディネータ102は車両安定性コーディネータ103に対して車両停止の指令を出力し、車両安定性コーディネータ103はブレーキ制御プログラム104に対してブレーキ作動の制御を行わせる指令を出力する。
【0078】
これによって、車両の状態が正常でない場合は、車両コーディネータ101の指令によってエンジンが停止し、ブレーキが作動して車両が緊急停止する。なお、この場合において緊急停止に大きく寄与しているのはブレーキの作動である。すなわち、エンジンの点火、停止のみでは最終的には車両は停止するものの、エンジンブレーキによるゆっくりとした減速しか実現しない。従って、緊急停止による緊急時の危険回避ができるようになるのは、車両コーディネータ101が最終的に強制動力を実現するブレーキを制御できるからである。換言すれば、ブレーキ制御プログラム104は緊急に車両の走行を停止することのできる機能要素を制御する制御手段である。
【0079】
このように、ABSECU100が車両コーディネータ101、ブレーキ制御プログラム104、および車両コーディネータ101からブレーキ制御プログラム104までの経路中のプログラムの全てを有しているので、車両コーディネータ101はブレーキ制御プログラム104とシリアル通信線10を使用することなく、プロセス間通信のみで情報を授受することができる。
【0080】
従って、車両コーディネータ101等によって車内通信ネットワークを通じて車両の機能の統合制御を行うシステムにおいて、シリアル通信線10の断線等、車内通信ネットワークが不全の場合においても緊急時の危険回避ができるようになる。
【0081】
なお、上記したように、複数のプログラムをまとめて1つのプログラムと読み替えるこができることから、車両コーディネータ101を特許請求の範囲のマネージャとすると、車両挙動コーディネータ102、車両安定性コーディネータ103、ブレーキ制御プログラム104、およびフロントブレーキ制御プログラム105を1つのプログラムとしての制御手段とすることができる。
【0082】
またあるいは、車両コーディネータ101、車両挙動コーディネータ102、車両安定性コーディネータ103を1つのプログラムとしてのマネージャとすると、ブレーキ制御プログラム104を制御手段とすることができる。
【0083】
また、同様に車両コーディネータ101、車両挙動コーディネータ102をまとめたものをマネージャとすると、車両安定性コーディネータ103、ブレーキ制御プログラム104を1つのプログラムとしての制御手段とすることができる。
【0084】
(第2実施形態)
図7に、本発明の第2実施形態に係る統合車両制御システムを実現する車内の通信ネットワークの構成図を示す。この通信ネットワークには、2つのシリアル通信線10、11があり、シリアル通信線10にはABSECU100、エンジンECU200、トランスミッションECU300がそれぞれノードとして接続しており、シリアル通信線11にはパワーウインドウECU520、エアコンECU540、ワイパーECU560がそれぞれノードとして接続している。また、オルタネータECU400は、シリアル通信線10、シリアル通信線11の両方に接続している。
【0085】
なお、各ECUは図3に示した基本構成を有しているが、この図においてはそれぞれのECU中のマイコンが実行するプログラムのみを記載するものとする。この図中、図4と同等の機能を有するものには同一の名称および符号を付し、その説明については省略する。ただし、ABSECU100のマイコン中のフラッシュメモリは車両コーディネータ101を有しておらず、オルタネータECU400のマイコンが車両コーディネータ101を有している。また、ABSECU100、エンジンECU200、トランスミッションECU300のマイコンが実行するプログラムの図中の記載についても、車両コーディネータ101がABSECU100内に無いことを除けば第1実施形態と同様であるとして、省略する。
【0086】
パワーウインドウECU520、エアコンECU540、およびワイパーECU560は、それぞれ機能要素としてのパワーウインドウ、エアコン、ワイパーの作動を制御するためのECUであり、そのための制御プログラムとしてそれぞれパワーウインドウ制御プログラム521、エアコン制御プログラム541、およびワイパー制御プログラム561を有している。
【0087】
パワーウインドウ制御プログラム521、エアコン制御プログラム541、およびワイパー制御プログラム561は、電気的制御コーディネータ401から作動についての指令を受信し、電気的制御コーディネータ401に対して使用電力等の作動状態の情報を送信する。
【0088】
車両コーディネータ101は、図5に示したものと同様の処理を行うが、異常処理ルーチンの内容が異なる。本実施形態の車両コーディネータ101の異常処理ルーチンの処理を図8に示す。この図中、図6の異常処理ルーチンのものと同等の処理には同一の符号を付し、それらの説明については省略する。以下この異常処理ルーチンについて説明する。
【0089】
ステップ920で正常であると判定した後、またはステップ940の処理の後、車両コーディネータ101はステップ950で、電気的制御コーディネータ401からパワーウインドウ、エアコン、ワイパー等電気機器の作動状態の情報を受信する。そしてまた電気的制御コーディネータ401から、発電制御プログラム402が制御するオルタネータの出力電流の情報を入力する。
【0090】
次にステップ960で、受信した出力電流の値が所定値より大きいか否かを判定する。この所定値は、オルタネータからその定格出力以上に電流が取り出され、オルタネータの巻き線を焼損することのないようにするため、かつ電流供給線にその定格以上に電流が流れないようにするための上限を設定するための値である。この値は、あらかじめオルタネータECU400のマイコン中のフラッシュメモリに記録されている。
【0091】
出力電流の値が所定値以下であると判定すると異常処理ルーチンは終了する。所定値より大きいと判定すると、処理はステップ970に進む。このステップ970では、電気的制御コーディネータ401にオルタネータの電流量を上記した所定値以下に制限するよう指令を出力する。あるいは、このステップ970では、出力電流量が所定値以下になるように、電気的制御コーディネータ401から受信したパワーウインドウECU520、エアコンECU540、ワイパーECU560等の作動の情報をもとに、これらの中から停止すべき電気機器を選択し、選択した電気機器を停止するよう指令を電気的制御コーディネータ401に出力するようにしてもよい。これによって、電気的制御コーディネータ401が発電制御プログラム402またはパワーウインドウECU520、エアコンECU540、ワイパーECU560に指令を送信し、結果として、オルタネータのからの出力電流が定格以下となり、発電器および電力供給線の破損に係る緊急時の危険回避が可能となる。
【0092】
このように、オルタネータは、車両の機能要素への電流供給を制限することのできる機能要素である。
【0093】
また、オルタネータECU400が電気的制御コーディネータ401、発電制御プログラム402を有しているので、車両コーディネータ101はブレーキ制御プログラム104とシリアル通信線10、11を使用することなく、プロセス間通信のみで情報を授受することができる。
【0094】
従って、車両コーディネータ101等によって車内通信ネットワークを通じて車両の機能の統合制御を行うシステムにおいて、シリアル通信線10、11の断線等、車内通信ネットワークが不全の場合においても緊急時の危険回避ができるようになる。
【0095】
なお、第1実施形態と同様、複数のプログラムをまとめて1つのプログラムと読み替えるこができることから、車両コーディネータ101を特許請求の範囲のマネージャであるとすると、電気的制御コーディネータ401、発電制御プログラム402が1つのプログラムとしての制御手段となる。
【0096】
またあるいは、車両コーディネータ101、電気的制御コーディネータ401を1つのプログラムとしてのマネージャとすると、ブレーキ制御プログラム104が制御手段となる。
【0097】
またあるいは、電気的制御コーディネータ401単独をマネージャとし、発電制御プログラム402を制御手段としてもよい。
【0098】
(第3実施形態)
以下、本発明の第3実施形態について説明する。本発明の構成は、第1実施形態において図4で示した車両統合制御システムの通信ネットワークにおいて、ABSECU100の構成を変更したものである。図9に、本実施形態におけるABSECU100’の構成を示す。なお、この図9においても図5と同じくドライバ/レシーバIC、プロトコルICの記載は省略する。
【0099】
このABSECU100’は、マイコン130および111の2つのマイコンを有する。これらのマイコンは、それぞれ独立の通信線を介して同じプロトコルICに接続されている。このプロトコルICは、第1実施形態において説明した機能に加え、それぞれのマイコンに宛てられた通信を振り分ける処理を行う。
【0100】
マイコン130の構成は、図4に示したマイコン110において、ブレーキ制御プログラム104をフロントブレーキ制御プログラム105に代えた構成となっている。
【0101】
フロントブレーキ制御プログラム105は、前輪の車輪速を検出し、またこの車輪速および車両安定性コーディネータ103の指令にもとづいて前輪のブレーキを制御するプログラムである。
【0102】
マイコン111は図示しないCPU、フラッシュメモリ、RAMを有し、予備車両コーディネータ101’およびリアブレーキ制御プログラム106をフラッシュメモリ中に有しており、起動するとフラッシュメモリからこれらプログラムを読み出して実行することで処理を行う。
【0103】
リアブレーキ制御プログラム106は、後輪の車輪速を検出し、またこの車輪速および車両安定性コーディネータ103の指令にもとづいて後輪のブレーキを制御するプログラムである。
【0104】
予備車両コーディネータ101’は、車両コーディネータ101の機能が不全となった場合に代替の車両コーディネータとして機能するようになっている。図10に予備車両コーディネータ101’のフローチャートを示し、この予備車両コーディネータ101’の作動を説明する。
【0105】
ステップ705においては、予備車両コーディネータ101’はネットワークを監視している。具体的には、シリアル通信線10を流れるデータを監視し、シリアル通信線10において車両コーディネータ101に対する送信があったときに、通信プロトコルに則って正しく車両コーディネータ101が応答を送信しているかをチェックする。
【0106】
そしてステップ710では車両コーディネータ101から正しい応答があるか否かを判定する。正しい応答があるなら、処理はステップ705に戻り、予備車両コーディネータ101’は監視を継続する。正しい応答がない場合は、処理はステップ715に進み、予備車両コーディネータ101’は車両コーディネータ101と同等の処理を開始する。具体的には、図5および図6の処理をステップ810から開始する。
【0107】
なお、フロントブレーキ制御プログラム105を有するマイコン130に車両コーディネータ101が含まれ、リアブレーキ制御プログラム106を有するマイコン111に代替の予備車両コーディネータ101’が含まれるのは、車両の緊急時の制動としては前輪のブレーキの方が後輪よりも効果が高いからである。
【0108】
このように、複数あるマネージャ(車両コーディネータ101、予備車両コーディネータ101’)のうち、作動するものとしては、緊急時に車両の危険を回避する機能がより高い機能要素を制御するプログラムを有するノードに含まれるものから順に優先的に用いられる。
【0109】
このようになっていることで、第1実施形態の効果に加え、車両コーディネータ101が機能不全になっても予備車両コーディネータ101’が車両コーディネータ101の代わりとして機能するので、車両統合制御システムの堅牢性を増すことができる。
【0110】
(第4実施形態)
以下、本発明の第4実施形態について説明する。本発明の構成は、第1実施形態において図4で示した車両統合制御システムの通信ネットワークにおいて、ABSECU100の構成を2つのECUに分割したことで変更したものである。図11に、本実施形態において2つに分割されたフロントABSECU120およびリアABSECU140の構成を示す。なお、この図11においても図5と同じくドライバ/レシーバIC、プロトコルICの記載は省略する。また、図9に示した構成物と同等のものについては同一符号を付し、その説明は省略する。
【0111】
フロントABSECU120およびリアABSECU140は、図3の共通構成を有したECUである。
【0112】
フロントABSECU120は、図9に示したマイコン130と同じマイコン130を有している。
【0113】
リアABSECU140は、マイコン150を有しており、マイコン150はフラッシュメモリ中に予備車両コーディネータ101’、予備車両挙動コーディネータ102’、予備車両安定性コーディネータ103’、およびリアブレーキ制御プログラム106を有している。
【0114】
車両挙動コーディネータ102’および予備車両安定性コーディネータ103’は、予備車両コーディネータ101’と類似の作動を行う。すなわち、予備車両挙動コーディネータ102’は車内の通信ネットワークを監視し、車両挙動コーディネータ102が正常な応答をしなくなったことを検知すると、車両挙動コーディネータ102の代わりとして同等の作動を開始する。また、予備車両安定性コーディネータ103’は車内の通信ネットワークを監視し、車両安定性コーディネータ103が正常な応答をしなくなったことを検知すると、車両安定性コーディネータ103の代わりとして同等の作動を開始する。
【0115】
予備車両コーディネータ101’がネットワークの監視を行っている通常時はこの車両コーディネータ101’の状態を監視している。そして、予備車両コーディネータ101’が車両コーディネータ101の代わりとしての処理を開始すると、それぞれが車両挙動コーディネータ102および車両安定性コーディネータ103の変わりとして処理を開始する。
【0116】
このように、複数あるマネージャ(車両コーディネータ101車両挙動コーディネータ102、車両安定性コーディネータ103の組、および予備車両コーディネータ101’、予備車両挙動コーディネータ102’、および予備車両安定性コーディネータ103’の組)のうち、作動するものとしては、緊急時に車両の危険を回避する機能がより高い機能要素を制御するプログラムを有するノードに含まれるものから順に優先的に用いられる。
【0117】
このようになっていることで、第1実施形態の効果に加え、車両コーディネータ101、車両挙動コーディネータ102、車両安定性コーディネータ103が機能不全になっても予備車両コーディネータ101’、予備車両挙動コーディネータ102’、予備車両安定性コーディネータ103’が車両コーディネータ101の代わりとして機能するので、車両統合制御システムの堅牢性を増すことができる。
【0118】
(他の実施形態)
なお、第1実施形態においては、緊急時に車両の走行を停止する機能要素を制御する制御手段は、ブレーキ制御プログラム104またはブレーキ制御プログラム104を含むプログラムであったが、例えばこれは電気自動車の場合、車両駆動のための電動モータを制御するモータ制御プログラムであってもよい。なぜなら、電動モータを逆回転させることで、車両に強制的な制動力をかけることができるからでる。
【0119】
また第3および第4実施形態においては、同一機能の2つのマネージャの一方のみが一時期に作動し、それらのうちで優先度の高いものから順に用いられるようになっているが、このように必ずしも優先度がつけられている必要はなく、単にマネージャを2系統とし、片側が機能不全となったとき、もう一方が代替として作動するものであってもよい。
【図面の簡単な説明】
【図1】本発明の第1実施形態に係る車両統合制御システムの制御体系図である。
【図2】図2に、本実施形態における車両1内の通信ネットワークの構成図である。
【図3】ECUの基本的な構成を示す図である。
【図4】各ECUの構成を示す図である。
【図5】車両コーディネータ101の処理のフローチャートである。
【図6】車両コーディネータ101の異常処理ルーチンのフローチャートである。
【図7】第2実施形態に係る車内の通信ネットワークの構成図である。
【図8】車両コーディネータ101の異常処理ルーチンのフローチャートである。
【図9】第3実施形態におけるABSECU100’の構成を示す図である。
【図10】予備車両コーディネータ101’の処理のフローチャートである。
【図11】第4実施形態におけるフロントABSECU120およびリアABSECU140の構成を示す図である。
【図12】従来例の車両統合制御システムにおける、エンジンECU50およびABSECU60の構成図である。
【符号の説明】
1…車両、10、11、49…シリアル通信線、50…エンジンECU、
51、61…ドライバ/レシーバIC、52、62…プロトコルIC、
54…車両コーディネータ、55…エンジンコントローラ、
64…ABSコントローラ、100…ABSECU、
101…車両コーディネータ、101’…予備車両コーディネータ、
102…車両挙動コーディネータ、102’…予備車両挙動コーディネータ、
103…車両安定性コーディネータ、
103’…予備車両安定性コーディネータ、
104…ブレーキ制御プログラム、
105…フロントブレーキ制御プログラム、
106…リアブレーキ制御プログラム、120…フロントABSECU、
140…リアABSECU、200…エンジンECU、
201…パワートレインコーディネータ、202…エンジン制御プログラム、
300…トランスミッションECU、301…変速制御プログラム、
400…オルタネータECU、401…電気的制御コーディネータ、
402…発電制御プログラム、500…ボディECU、
501…パワーウインドウ等制御プログラム、
520…パワーウインドウECU、
521…パワーウインドウ制御プログラム、540…エアコンECU、
541…エアコン制御プログラム、560…ワイパーECU、
561…ワイパー制御プログラム。
Claims (7)
- 車内通信ネットワークに接続され、車両の複数の機能要素の少なくとも1つの動作を制御する制御手段を有するノードを複数備え、
更に前記制御手段の複数に動作指令を出力するマネージャを備え、
前記制御手段は、入力した前記動作指令にもとづいて当該機能要素の動作を制御し、
前記マネージャは、前記動作指令を出力する対象の複数の前記制御手段のうち、緊急時に車両の危険を回避することのできる機能要素を制御する制御手段を有するノードの少なくとも1つに含まれ、
さらに前記マネージャは、前記動作指令を出力する対象の複数の前記制御手段のうち、自らが含まれるノード以外のノードが有する制御手段には、前記車内通信ネットワークを介して前記動作指令を出力し、自らが含まれている前記ノードが有する前記緊急時に車両の危険を回避することのできる機能要素を制御する制御手段には、ノード内通信によって前記動作指令を出力することを特徴とする車両統合制御システム。 - 前記マネージャは、前記動作指令を出力する対象の複数の前記制御手段のうち、緊急に車両の走行を停止することのできる機能要素を制御する制御手段を有するノードの少なくとも1つに含まれていることを特徴とする請求項1に記載の車両統合制御システム。
- 前記マネージャは、前記複数のノードの内、ブレーキを制御する制御手段を有するノードに含まれていることを特徴とする請求項2に記載の車両統合制御システム。
- 前記マネージャは、前記動作指令を送信する対象の複数の前記制御手段のうち、前記車両の機能要素への電流供給を制限することのできる機能要素を制御する制御手段を有するノードの少なくとも1つに含まれていることを特徴とする請求項1に記載の車両統合制御システム。
- 前記マネージャは、前記複数のノードの内、オルタネータを制御する制御手段を有するノードに含まれていることを特徴とする請求項4に記載の車両統合制御システム。
- 前記マネージャは、前記複数のノードの内、緊急時に車両の危険を回避することのできる機能要素を制御する制御手段を有するノードの少なくとも2つに含まれており、
前記少なくとも2つのノードに含まれるマネージャのうち1つだけが一時期に作動し、
前記作動するマネージャとして、緊急時に車両の危険を回避する機能がより高い機能要素を制御する制御手段を有するノードに含まれるものから順に優先的に用いられることを特徴とする請求項1ないし5のいずれか1つに記載の車両統合制御システム。 - 前記マネージャは、前記複数のノードの内、緊急時に車両の危険を回避することのできる機能要素を制御する制御手段を有するノードの少なくとも2つに含まれており、
前記少なくとも2つのノードに含まれるマネージャのうち1つだけが一時期に作動し、
作動中の1つのマネージャが機能不全となった場合には、前記作動中の1つのマネージャ以外の他のマネージャが代替作動することを特徴とする請求項1ないし5のいずれか1つに記載の車両統合制御システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002285547A JP4225025B2 (ja) | 2002-09-30 | 2002-09-30 | 車両統合制御システム |
| US10/655,033 US6898500B2 (en) | 2002-09-30 | 2003-09-05 | Vehicle integrated control system |
| EP03021947A EP1403129B1 (en) | 2002-09-30 | 2003-09-29 | Vehicle integrated control system |
| DE60331623T DE60331623D1 (de) | 2002-09-30 | 2003-09-29 | Integriertes Steuerungssystem für Fahrzeuge |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002285547A JP4225025B2 (ja) | 2002-09-30 | 2002-09-30 | 車両統合制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004122803A true JP2004122803A (ja) | 2004-04-22 |
| JP4225025B2 JP4225025B2 (ja) | 2009-02-18 |
Family
ID=31973397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002285547A Expired - Fee Related JP4225025B2 (ja) | 2002-09-30 | 2002-09-30 | 車両統合制御システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6898500B2 (ja) |
| EP (1) | EP1403129B1 (ja) |
| JP (1) | JP4225025B2 (ja) |
| DE (1) | DE60331623D1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013006482A (ja) * | 2011-06-23 | 2013-01-10 | Autonetworks Technologies Ltd | 車載処理装置及び処理プログラム |
| JP2016215690A (ja) * | 2015-05-14 | 2016-12-22 | 株式会社デンソー | 制御システム |
| JP2017061278A (ja) * | 2015-09-25 | 2017-03-30 | 株式会社デンソー | 制御システム |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4134672B2 (ja) * | 2002-10-18 | 2008-08-20 | 株式会社デンソー | 車両用制御システム |
| JP4222154B2 (ja) * | 2003-08-28 | 2009-02-12 | 株式会社デンソー | 車両制御システム |
| US7689337B2 (en) * | 2003-09-30 | 2010-03-30 | Honda Motor Co., Ltd. | Cooperative vehicle control system |
| JP2005112007A (ja) * | 2003-10-02 | 2005-04-28 | Toyoda Mach Works Ltd | 車両の統合制御装置 |
| JP2005193811A (ja) * | 2004-01-08 | 2005-07-21 | Toyota Motor Corp | 車両の統合制御システム |
| CN101107154B (zh) * | 2005-01-24 | 2010-05-26 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 用于车辆中行驶动态调节的装置和方法 |
| JP4457347B2 (ja) * | 2005-02-02 | 2010-04-28 | 株式会社デンソー | 自動車用制御装置 |
| CN100492224C (zh) * | 2005-06-14 | 2009-05-27 | 上海理工大学 | 电子设备的电源管理方法 |
| US7386379B2 (en) * | 2005-07-22 | 2008-06-10 | Gm Global Technology Operations, Inc. | Method and apparatus to control coordinated wheel motors |
| US20070050095A1 (en) * | 2005-09-01 | 2007-03-01 | Polaris Industries Inc. | Controller area network based self-configuring vehicle management system and method |
| US7832223B2 (en) | 2006-01-10 | 2010-11-16 | Cnh America Llc | Controller area network based climate control system for a self-propelled work machine and method of operation of the same |
| US7610127B2 (en) * | 2006-03-08 | 2009-10-27 | Delphi Technologies, Inc. | Vehicle stability monitoring system and method and article of manufacture for determining vehicle stability |
| US8392882B2 (en) | 2006-11-30 | 2013-03-05 | Caterpillar Inc. | Engine state-based control of software functions |
| US7690196B2 (en) | 2007-02-07 | 2010-04-06 | Sauer-Danfoss Aps | Hydraulic actuator having an auxiliary valve |
| US7849686B2 (en) | 2007-02-07 | 2010-12-14 | Sauer-Danfoss Aps | Valve assembly and a hydraulic actuator comprising the valve assembly |
| US7677035B2 (en) * | 2007-02-07 | 2010-03-16 | Sauer-Danfoss Aps | Control system for a hydraulic servomotor |
| US7624671B2 (en) | 2007-02-07 | 2009-12-01 | Sauer-Danfoss Aps | Hydraulic actuator for a servomotor with an end lock function |
| DE102007050775A1 (de) * | 2007-10-24 | 2009-04-30 | Zf Friedrichshafen Ag | Kraftfahrzeugsteuerungssystem |
| DE102007050771A1 (de) * | 2007-10-24 | 2009-05-07 | Zf Friedrichshafen Ag | Kraftfahrzeugsteuerungssystem |
| DE102007050773A1 (de) * | 2007-10-24 | 2009-04-30 | Zf Friedrichshafen Ag | Kraftfahrzeugsteuerungssystem |
| US8239109B2 (en) * | 2008-01-30 | 2012-08-07 | Ford Global Technologies, Llc | Output shaft speed sensor based anti-lock braking system |
| JP4624448B2 (ja) * | 2008-07-30 | 2011-02-02 | 株式会社オートネットワーク技術研究所 | 制御装置、制御システム及びコンピュータプログラム |
| JP4934113B2 (ja) * | 2008-08-01 | 2012-05-16 | 株式会社オートネットワーク技術研究所 | 制御装置及びコンピュータプログラム |
| KR101196258B1 (ko) * | 2008-11-19 | 2012-11-05 | 한국전자통신연구원 | 방송 서비스 제공 장치와 그 방법 및 이를 위한 시스템 |
| US9446287B2 (en) * | 2011-07-01 | 2016-09-20 | Nike, Inc. | Sensor-based athletic activity measurements |
| US9576208B2 (en) * | 2013-12-11 | 2017-02-21 | Continental Automotive Systems, Inc. | Emergency vehicle detection with digital image sensor |
| US9514581B2 (en) * | 2014-01-03 | 2016-12-06 | Shem, Llc | Diagnostic system for a vehicle |
| US11400997B2 (en) | 2016-05-23 | 2022-08-02 | Indian Motorcycle International, LLC | Display systems and methods for a recreational vehicle |
| DE102016212897A1 (de) * | 2016-07-14 | 2018-01-18 | Bayerische Motoren Werke Aktiengesellschaft | Steuervorrichtung zur Auswahl von Gruppen-Funktionen |
| EP3483673B1 (en) * | 2017-11-14 | 2023-06-14 | TTTech Auto AG | Method and computer system to consistently control a set of actuators |
| CN111976619A (zh) * | 2020-07-28 | 2020-11-24 | 浙江飞碟汽车制造有限公司 | 一种集成式控制系统 |
| CN113353093B (zh) * | 2021-08-10 | 2021-12-10 | 北汽福田汽车股份有限公司 | 车辆的控制方法、装置和车辆 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5810246A (ja) * | 1981-07-13 | 1983-01-20 | Nissan Motor Co Ltd | 車両用ディジタル制御装置 |
| JP3465250B2 (ja) | 1993-07-30 | 2003-11-10 | マツダ株式会社 | 多重伝送装置 |
| JPH1020970A (ja) | 1996-06-28 | 1998-01-23 | Hitachi Ltd | 集約配線装置 |
| US6434459B2 (en) * | 1996-12-16 | 2002-08-13 | Microsoft Corporation | Automobile information system |
| DE19838336A1 (de) * | 1998-08-24 | 2000-03-02 | Bosch Gmbh Robert | System zur Steuerung der Bewegung eines Fahrzeugs |
| DE19838337A1 (de) * | 1998-08-24 | 2000-03-02 | Bosch Gmbh Robert | Steuerungssystem eines Fahrzeugs |
| DE19838333A1 (de) * | 1998-08-24 | 2000-03-02 | Bosch Gmbh Robert | System zur Steuerung des Antriebs eines Fahrzeugs |
| GB9822926D0 (en) | 1998-10-20 | 1998-12-16 | Sca Packaging Ltd | Containers |
| DE19857916A1 (de) * | 1998-12-15 | 2000-06-21 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung von elektrischen Verbrauchern in einem Fahrzeug |
| JP4590773B2 (ja) | 2000-06-22 | 2010-12-01 | 株式会社デンソー | 車両統合制御システム |
| JP4254027B2 (ja) * | 2000-07-26 | 2009-04-15 | 株式会社デンソー | 車両統合制御システム |
| JP4399987B2 (ja) * | 2001-01-25 | 2010-01-20 | 株式会社デンソー | 車両統合制御におけるフェイルセーフシステム |
| JP2002347479A (ja) * | 2001-05-29 | 2002-12-04 | Denso Corp | 車両統合制御システム |
| US6816764B2 (en) * | 2002-05-02 | 2004-11-09 | Ford Global Technologies, Llc | Suspension coordinator subsystem and method |
| US6622074B1 (en) * | 2002-05-29 | 2003-09-16 | Ford Global Technologies, Llc | Vehicle motion control subsystem and method |
-
2002
- 2002-09-30 JP JP2002285547A patent/JP4225025B2/ja not_active Expired - Fee Related
-
2003
- 2003-09-05 US US10/655,033 patent/US6898500B2/en not_active Expired - Lifetime
- 2003-09-29 EP EP03021947A patent/EP1403129B1/en not_active Expired - Fee Related
- 2003-09-29 DE DE60331623T patent/DE60331623D1/de not_active Expired - Lifetime
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013006482A (ja) * | 2011-06-23 | 2013-01-10 | Autonetworks Technologies Ltd | 車載処理装置及び処理プログラム |
| JP2016215690A (ja) * | 2015-05-14 | 2016-12-22 | 株式会社デンソー | 制御システム |
| JP2017061278A (ja) * | 2015-09-25 | 2017-03-30 | 株式会社デンソー | 制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4225025B2 (ja) | 2009-02-18 |
| EP1403129A3 (en) | 2007-03-21 |
| EP1403129B1 (en) | 2010-03-10 |
| EP1403129A2 (en) | 2004-03-31 |
| DE60331623D1 (de) | 2010-04-22 |
| US6898500B2 (en) | 2005-05-24 |
| US20040064220A1 (en) | 2004-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4225025B2 (ja) | 車両統合制御システム | |
| US9650038B2 (en) | Vehicle control system | |
| JP6214730B2 (ja) | 車両制御システム | |
| JP3242900B2 (ja) | 自動車用電気式ブレーキ装置 | |
| US7676286B2 (en) | Fail-silent node architecture | |
| JP4365427B2 (ja) | エコラン制御装置、エコラン制御システム及び制御方法 | |
| JP4478037B2 (ja) | 車両制御装置 | |
| US7096108B2 (en) | Brake system with distributed electronic control units incorporating failsafe mode | |
| US9594356B2 (en) | Circuit arrangement having a fail-silent function | |
| JP2004136816A (ja) | 車両用制御システム | |
| JP6504065B2 (ja) | 車両用制御システム | |
| JP2000016262A (ja) | 自動車用電気機械式ブレ―キ装置 | |
| JP2017105362A (ja) | 制御システム | |
| JP2007220050A (ja) | 分布システムのためのフォールトトレランスのノードアーキテクチャー | |
| JP2008259124A (ja) | 車載通信システム、電子制御ユニット | |
| JP2019041171A (ja) | 車両の制御装置 | |
| CN105313880A (zh) | 具有至少两个驱动执行器和提高的失效安全性的机动车、运行方法以及执行该运行方法的机构 | |
| JP4528457B2 (ja) | 自動車用ブレーキ装置及びその制御方法 | |
| JP6068931B2 (ja) | 自動車用制御装置 | |
| KR101835783B1 (ko) | 차량용 파워 트레인 제어 장치 | |
| JP6761714B2 (ja) | 車両用電子制御システム | |
| KR20240020953A (ko) | 차량 제어 장치 및 그 방법 | |
| KR20240021346A (ko) | 차량 제어 장치 및 그 방법 | |
| JP2023146503A (ja) | 車両用通信制御システム及び車両用通信制御装置 | |
| JPH04304099A (ja) | 多重伝送方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080403 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081117 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111205 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4225025 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121205 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131205 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |