JP2004090126A - 移動ロボットの転倒防止方法及びその装置 - Google Patents
移動ロボットの転倒防止方法及びその装置 Download PDFInfo
- Publication number
- JP2004090126A JP2004090126A JP2002252627A JP2002252627A JP2004090126A JP 2004090126 A JP2004090126 A JP 2004090126A JP 2002252627 A JP2002252627 A JP 2002252627A JP 2002252627 A JP2002252627 A JP 2002252627A JP 2004090126 A JP2004090126 A JP 2004090126A
- Authority
- JP
- Japan
- Prior art keywords
- mobile robot
- hoist
- wire
- robot
- mobile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Manipulator (AREA)
Abstract
【解決手段】移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるようにした移動ロボットの転倒防止方法において、前記移動ロボットを2軸方向に移動せしめ、前記ホイストを、前記移動ロボットの移動検知信号あるいは移動設定信号により該移動ロボットの移動に追従させて前記2軸方向に走行させることを特徴とする
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、2足歩行ロボット、車輪走行ロボット、及びクローラ走行ロボットを含む移動ロボットの移動試験等に適用され、移動ロボットの上部をこれの上方に設けられたワイヤの下端部に連結して該移動ロボットとホイストとがワイヤを介して連携移動せしめるようにした移動ロボットの転倒防止方法及び装置に関する。
【0002】
【従来の技術】
2足歩行ロボット等の移動動作が不安定に陥り易い移動ロボットの移動試験を行うにあたっては、該移動ロボットの上方に設置したホイスト(天井クレーン)から吊下したワイヤに前記移動ロボットを連結して、移動ロボットが転倒しそうになったとき該ホイストとワイヤにより該移動ロボットを引き戻す手段が提供されている。
【0003】
図9に示される手段において、2は移動ロボットでこの例では下部に装着されたクローラ2aにより走行するクローラ走行式移動ロボットとなっている。4及び4aは前記移動ロボット2の上方にX―Y2軸方向に設置されたレールである。1はホイストで、上部に取り付けられた転輪1aを介して前記レール4に沿って走行するようになっている。前記レール4は、その両端部に取り付けられた転輪4bを介してレール4aに沿って移動可能となっており、従って前記ホイスト1は前記移動ロボット2に対してX―Y2軸方向に相対移動可能となる。
【0004】
3は前記ホイスト1に繰り出し巻き取り自在に巻回されたワイヤで、該ワイヤ3の下端部に吊具6を介して前記移動ロボット2が連結され、前記移動ロボット2とホイスト1とが前記ワイヤ3を介してX―Y2軸方向に連携移動せしめられるようになっている。
06は遠隔操作用のペンダントボックスで、操作線06aを介して前記ホイスト1に装着されたホイスト制御ボックス07に接続され、該ペンダントボックス06からの操作信号により前記ホイスト1の転輪1a及びレール4の転輪4bを個別に回転制御するようになっている。尚、前記ペンダントボックス06からの操作信号を無線にて前記ホイスト制御ボックス07に伝送するようにしていることもある。
【0005】
また、移動ロボットの移動制御手段として提供されている特開2001−212775号公報(特許文献1)においては、2足走行ロボットにおいて、脚部にて質量を有する物体を蹴る際に物体から脚部に受ける反力をシミュレーションによって予測しておくことにより、物体の質量や反発係数が不明であっても前記反力によってロボットが転倒するのを回避可能に構成されている。
【0006】
【特許文献1】
特開2001−212775号公報
【0007】
【発明が解決しようとする課題】
図9に示される移動ロボットの移動制御手段にあっては、移動ロボット2に、レール4、4aに沿ってX―Y2軸方向に移動可能なホイスト1をワイヤ3を介して連結し、ペンダントボックス06からの操作信号により前記ホイスト1を移動ロボット2に連携移動するように操作している。
しかしながら、かかる従来技術にあっては、操作者が移動ロボット2及びホイスト1の運動を目視しながらペンダントボックス06を操作して該ホイスト1と移動ロボット2とを人為的に連携移動させているため、移動ロボット2とホイスト1とを該移動ロボット2に無用な外力を加えることなく正確に連携移動させるのが困難となる。
このため、操作者の操作誤りによって移動ロボット2とホイスト1との距離が過小になってワイヤ3の張力が過大となり、移動ロボット2が転倒するという事態が発生し易くなる。
また、前記移動ロボット2の移動路に階段等の上下段差がある場合には、移動ロボット2とホイスト1とを連結しているワイヤ3自体の長さ及び張力調整が不可能に近いため、段差移動時に移動ロボット2の転倒が発生しやすい。
【0008】
また、前記特開2001−212775号公報にて提供されている手段にあっては、移動ロボット自体で移動制御を行うものであり、物体から脚部に受ける反力のみによって移動ロボットに過大な力がかかるのを抑制し、該反力によりロボットが転倒するのを回避しているに止まり、移動ロボットにホイストをに連携移動させる手段に比べて、移動ロボットの安定性が不充分であり、殊に移動路に上下段差がある場合には移動ロボットの転倒が発生し易い、
等の問題点を有している。
【0009】
本発明はかかる従来技術の課題に鑑み、ホイストにワイヤを介して連携移動される移動ロボットを該移動ロボットに無用な外力を加えることなく正確に連携移動せしめ得るとともに、該移動ロボットの転倒予知を正確に成し得るようにして、移動ロボットの転倒の発生を防止できる移動ロボットの転倒防止方法及びその装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
本発明はかかる課題を解決するため、請求項1記載の発明として、移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるようにした移動ロボットの転倒防止方法において、前記移動ロボットを2軸方向に移動せしめ、前記ホイストを、前記移動ロボットの移動検知信号あるいは移動設定信号により該移動ロボットの移動に追従させて前記2軸方向に走行させることを特徴とする移動ロボットの転倒防止方法を提案する。
【0011】
請求項2記載の発明は請求項1に加えて、前記移動ロボットの移動及び前記ホイストの走行時において、前記ホイストと移動ロボットの相対位置が所定量以内になるように前記ワイヤ長さを調整することを特徴とする。
【0012】
請求項3ないし5記載の発明は請求項1ないし2における移動ロボットの具体的制御方法に係り、請求項3においては前記移動ロボットの位置を検出し、該位置検出信号に基づき、前記ホイストを該ホイストと前記移動ロボットとの相対位置が所定量以内になるように走行せしめる。
【0013】
請求項4においては、前記移動ロボットをカメラにより撮像し、この撮像信号に基づき、前記ホイストを該ホイストと前記移動ロボットとの相対位置が所定量以内になるように走行せしめる。
【0014】
請求項5においては、前記移動ロボットの移動マップを予め設定し、前記移動ロボット及びホイストを該移動マップに設定された移動ルートに従い移動せしめる。
【0015】
請求項11ないし12記載の発明は、請求項1〜5の方法を実施する装置の発明に係り、請求項11記載の発明は、移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるように構成された移動ロボットの転倒防止装置において、前記移動ロボットの2軸方向への移動状態を検出するロボット移動状態検出手段と、該検出手段から入力される前記ロボット移動状態検出信号に基づき、前記ホイストを前記移動ロボットの移動と連携させて前記2軸方向に追従走行させるコントローラを備えてなることを特徴とする。
【0016】
請求項12記載の発明は請求項11に加えて、前記ワイヤの長さを検出するワイヤ長さ検出手段を設け、前記コントローラは該検出手段から入力される前記ワイヤ長さ検出信号に基づき前記ホイストと移動ロボットとの相対位置が所定量以内になるように前記ワイヤ長さを調整するように構成されてなる。
【0017】
かかる発明によれば、移動ロボットとワイヤを介して連携移動せしめられるホイストをコントローラによって前記移動ロボットの移動検出信号に基づきあるいは予め設定された移動ロボットの移動設定信号に基づき該移動ロボットの移動に追従させて2軸方向に走行させる、具体的には請求項3のように移動ロボットの位置検出信号に基づきホイストを該ホイストと移動ロボットとの相対位置が所定量以内になるように走行せしめ、あるいは請求項4のように移動ロボットをカメラにより撮像した撮像信号に基づきホイストを該ホイストと移動ロボットとの相対位置が所定量以内になるように走行せしめ、あるいは請求項5のように移動ロボットの移動マップを予め設定して移動ロボット及びホイストを該移動マップに設定された移動ルートに従い移動せしめる。
【0018】
従ってかかる発明によれば、移動ロボットと該移動ロボットにワイヤを介して連結されたホイストとを、該移動ロボットの移動検出信号あるいは移動ロボットの移動設定信号に基づきコントローラによって該ホイストを移動ロボットの移動に追従させて2軸方向に走行させあるいはワイヤ長さを調整することにより、該移動ロボットに転倒が発生せずかつ移動ロボットに無用な外力が作用することのない適正な相対位置関係を保持して、人為的操作を一切必要とすることなく自動的に連携移動せしめることができる。
また移動ロボットの移動路に階段等の上下段差がある場合にも移動ロボットとホイストとを連結しているワイヤ自体の長さ及び張力調整を容易にできるため、移動ロボットは転倒することなく段差移動をスムーズに行うことができる。
【0019】
また請求項6記載の発明は、移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるようにした移動ロボットの転倒防止方法において、前記移動ロボットを2軸方向に移動せしめ、該移動ロボットの移動状態検知信号あるいは前記ワイヤの張力状態検知信号に基づき該移動ロボットの転倒の有無を判定することを特徴とする。
【0020】
請求項7ないし10記載の発明は請求項6における移動ロボットの具体的制御方法に係り、請求項7においては前記移動ロボットの傾斜角を検出し、該傾斜角検出値と予め設定された傾斜角許容値とを比較し、該傾斜角検出値が傾斜角許容値を超えるとき前記移動ロボットの転倒の判定を行う。
【0021】
請求項8においては、前記移動ロボットをカメラにより撮像し、この撮像信号に基づき前記移動ロボットと前記ホイストとの位置ずれ量の時間変化率を算出し、該位置ずれ量時間変化率の算出値が予め設定された位置ずれ量時間変化率の許容値を超えるとき前記移動ロボットの転倒の判定をなす。
【0022】
請求項9においては、前記ワイヤの張力を検出し、該ワイヤ張力の検出値と予め設定されたワイヤ張力の許容値とを比較し、該ワイヤ張力検出値がワイヤ張力許容値を超えるとき前記移動ロボットの転倒の判定をなす。
【0023】
請求項10においては、前記移動ロボットの移動加速度を検出し、該移動加速度の検出値と予め設定された移動加速度の許容値とを比較し、該移動加速度検出値が移動加速度許容値を超えるとき前記移動ロボットの転倒の判定をなす。
【0024】
請求項13記載の発明は、請求項6〜10の方法を実施する装置の発明に係り、移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるように構成された移動ロボットの転倒防止装置において、前記移動ロボットの移動状態を検出するロボット移動状態検出手段と、該検出手段から入力される前記ロボット移動状態検出信号と予め設定された前記移動ロボットの転倒条件とを突き合わせて該移動状態の検出信号が該転倒条件を満足したとき前記移動ロボットの転倒の判定を行うコントローラを備えてなることを特徴とする。
【0025】
請求項6〜10及び請求項13記載の発明によれば、移動ロボットとワイヤを介して連携移動せしめられるホイストを、コントローラによって該移動ロボットの転倒を確認あるいは予知し得る検知信号即ち移動ロボットの移動状態検知信号あるいはワイヤの張力状態検知信号に基づき移動ロボットの転倒の有無を判定する。
即ち、具体的には請求項7のように移動ロボットの傾斜角検出値が傾斜角許容値を超えるとき移動ロボットの転倒の判定を行い、請求項8のように移動ロボットのカメラによる撮像信号に基づく移動ロボットとホイストとの位置ずれ量時間変化率の算出値が該位置ずれ量時間変化率の許容値を超えるとき移動ロボットの転倒の判定を行い、請求項9のように該ワイヤ張力検出値がワイヤ張力許容値を超えるとき移動ロボットの転倒の判定を行い、請求項10のように移動ロボットの移動加速度検出値が移動加速度許容値を超えるとき移動ロボットの転倒の判定を行う。
【0026】
従ってかかる発明によれば、該移動ロボットの転倒の有無あるいは転倒可能性を自動的にかつ随時確実に検知することができ、移動ロボットの転倒の際における復元措置あるいは移動試験の中止を的確に行うことができる。また移動ロボットの転倒可能性を検知可能であるので、移動ロボットとホイストとの連携移動操作及びワイヤの長さ調整等の移動ロボットの転倒防止措置を迅速に行うことができる。
【0027】
【発明の実施の形態】
以下、本発明を図に示した実施例を用いて詳細に説明する。但し、この実施例に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではなく、単なる説明例にすぎない。
【0028】
図1は本発明の実施例に係るクローラ式移動ロボットの転倒防止装置の全体構成図である。図2は前記実施例における移動ロボット及びホイストの移動制御の第1例を示す制御ブロック図、図3は前記実施例における移動ロボット及びホイストの移動制御の第2例を示す制御ブロック図、図4は前記実施例における移動ロボット及びホイストの移動制御の第3例を示す制御ブロック図である。図5は前記実施例における移動ロボット及びホイストの転倒判定制御の第1例を示す制御ブロック図、図6は前記実施例における移動ロボット及びホイストの転倒判定制御の第2例を示す制御ブロック図、図7は前記実施例における移動ロボット及びホイストの転倒判定制御の第3例を示す制御ブロック図、図8は前記実施例における移動ロボット及びホイストの転倒判定制御の第4例を示す制御ブロック図である。
【0029】
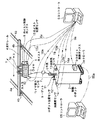
全体構成を示す図1において、2は走行部にクローラ2aを備えた移動ロボットである。4、4aは互いに直交するように配設された走行レールで、該走行レール4はその両端下部に取り付けられた転輪4bを介して走行レール4a上を該走行レール4aの方向(Y方向)と直交する方向(X方向)に移動可能となっている。
1はホイストで、これの上部に装着された転輪1aを介して前記走行レール4上を該走行レール4の方向(X方向)に移動可能となっている。3は前記ホイスト1繰り出し巻き取り可能に巻回されたワイヤでその下端部が前記移動ロボット2の上部に取り付けられた吊具6に連結されている。
【0030】
8は前記ホイスト1の本体部に取り付けられたホイスト制御ボックスで、後述するコントローラ5から制御回線8aを介して伝送される制御操作信号を受けて該ホイスト1を駆動操作するホイスト駆動装置81及び、前記ワイヤ3の繰り出し量を調整してワイヤ張力を制御するワイヤ繰出し量調整装置82が収納されている。
9は前記移動ロボット2の本体部に取り付けられたロボット制御ボックスで、後述するコントローラ5から制御回線9aを介して伝送される制御操作信号を受けて該移動ロボット2を駆動操作するロボット駆動装置91が収納されている。5はコントローラで、後述する各センサからの検出信号及び該コントローラ5内に設定された設定信号に基づき算出した制御操作信号を前記ホイスト制御ボックス8内のホイスト駆動装置81、ワイヤ繰り出し量調整装置82及びロボット制御ボックス9内のロボット駆動装置91に出力するものである。本コントローラ5は、ホイスト1に搭載することも可能で、搭載した場合、ケーブル(8a、9a等)が不要になり、ケーブルとの干渉に起因するトラブル(操作者やロボットの転倒や破損など)を回避できる。
尚、前記コントローラ5を前記ホイスト制御ボックス8内のホイスト駆動装置81及びワイヤ繰り出し量調整装置82の制御用とし、前記ロボット制御ボックス9内のロボット駆動装置91の制御用として別個のコントローラ05(05aは制御回線)を設けることもできる。
【0031】
12は前記移動ロボット2の上面に取り付けられて該移動ロボット2の位置を検出するロボット位置センサで、該ロボット位置センサ12からの移動ロボット2位置の検出信号は検出回線12aを介して前記コントローラ5に入力される。13は前記移動ロボット2の上面または側面に取り付けられて該移動ロボット2の傾斜角を検出する傾斜角センサで、該傾斜角センサ13からの移動ロボット2傾斜角の検出信号は検出回線13aを介して前記コントローラ5に入力される。
14は前記移動ロボット2の側面または上面に取り付けられて該移動ロボット2の移動加速度を検出する加速度センサで、該加速度センサ14からの移動ロボット2の移動加速度の検出信号は検出回線14aを介して前記コントローラ5に入力される。
【0032】
10は前記ホイスト1の側部または下部に取り付けられたカメラ、11は前記移動ロボット2の上面に固着されたターゲットで、該カメラ10によるターゲット11位置つまり移動ロボット2位置の撮像信号は検出回線10aを介して前記コントローラ5に入力される。
15は前記ホイスト1の本体部に取り付けられてホイスト1の位置を検出するホイスト位置センサで、該ホイスト位置センサ15からのホイスト1の位置検出信号は検出回線15aを介して前記コントローラ5に入力される。
7は前記ワイヤ3の中間部に取り付けられ該ワイヤ3の張力を検出するワイヤ張力センサで、該ワイヤ張力センサ7からのワイヤ張力の検出信号は検出回線7aを介して前記コントローラ5に入力される。
【0033】
次に、かかる構成からなる移動ロボットの転倒防止装置の動作を説明する。
先ず、図2に示す移動ロボット移動制御の第1の手段において、前記ロボット位置センサ12からの移動ロボット2位置の検出信号及びホイスト位置センサ15からのホイスト1の位置検出信号は前記コントローラ5の位置ずれ量算出部51に入力される。該位置ずれ量算出部51においては、前記2つの検出信号に基づき前記ホイスト1と記移動ロボット2との位置ずれ量を算出してホイスト移動条件算出部52及びワイヤ張力調整値算出部53に入力する。
【0034】
該ホイスト移動条件算出部52においては、前記位置ずれ量が適正値つまり前記ホイスト1が前記移動ロボット2の真上に位置し得るような位置ずれ量の許容値内になるような前記ホイスト1の移動量(つまり両者の相対位置)を算出して前記ホイスト制御ボックス8内のホイスト駆動装置81に伝送する。そして該ホイスト駆動装置81はホイスト1を前記移動量だけ移動せしめ、これにより該ホイスト1は前記位置ずれ量が許容値内になるような適正位置に移動せしめられる。
また、ワイヤ張力調整値算出部53においては、移動ロボット2が転倒しない範囲になるようなワイヤ3張力の調整値を算出してホイスト制御ボックス8内のワイヤ繰り出し量調整装置82に伝送する。そして該ワイヤ繰り出し量調整装置82は前記ホイスト1のワイヤ繰り出し量を前記調整値に設定する。
以上の動作により、移動ロボット2とホイスト1とは適正な相対位置を保持し、移動ロボット2が転倒しない範囲のワイヤ張力で以って相対移動せしめられる。
【0035】
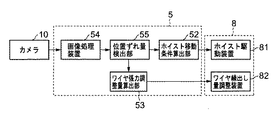
図3に示す移動ロボット移動制御の第2の手段において、前記カメラ10によるターゲット11位置つまり移動ロボット2位置の撮像信号はコントローラ5の画像処理装置54に入力され、該画像処理装置54において電気信号(変位信号)に処理されてロボット位置ずれ量算出部55に入力される。
該位置ずれ量算出部55においては、前記画像処理装置54からの変位信号に基づき前記ホイスト1と記移動ロボット2との位置ずれ量を算出してホイスト移動条件算出部52及びワイヤ張力調整値算出部53に入力する。
該ホイスト移動条件算出部52及びワイヤ張力調整値算出部53以後の動作は、図2に示す第1の手段と同様である。
【0036】
図4に示す移動ロボット移動制御の第3の手段において、前記コントローラ5内のロボット移動マップ設定部62には前記移動ロボット2の移動マップが予め設定されている。該コントローラ5は前記移動マップデータを前記ホイスト制御ボックス8内のホイスト駆動装置81及びロボット制御ボックス9内のロボット移動装置91に伝送する。
そして該ホイスト駆動装置81及びロボット移動装置91は、前記ホイスト1及び移動ロボット2を前記移動マップに設定された移動ルートに従い相関連させて移動せしめる。
以上の動作により、移動ロボット2とホイスト1とは適正な相対位置を保持し、移動ロボット2が転倒しない範囲のワイヤ張力で以って相対移動せしめられる。
【0037】
かかる移動ロボット移動制御の第1〜3の手段によれば、移動ロボット2とワイヤ3を介して連携移動せしめられるホイスト1をコントローラ5によって前記移動ロボット2の移動検出信号に基づきあるいは移動マップに設定された移動ルートに基づき該移動ロボットの移動に追従させて2軸方向に走行させ、あるいはワイヤ3の長さを調整することにより、該移動ロボット2に転倒が発生せずかつ該移動ロボット2に無用な外力が作用することのない適正な相対位置関係を保持して移動ロボット2をホイスト1に連携移動せしめることができる。
【0038】
次に、図5に示すように移動ロボット転倒有無判定制御の第1の手段において、前記傾斜角センサ13からの移動ロボット2傾斜角の検出信号は前記コントローラ5の転倒有無判定部57に入力される。
56は許容傾斜角設定部で、前記移動ロボット2の転倒限界の傾斜角つまり傾斜角許容値が設定されている。該転倒有無判定部57においては、前記傾斜角センサ13からの移動ロボット2の傾斜角検出値を許容傾斜角設定部56に設定された傾斜角許容値と比較し、前記傾斜角検出値が傾斜角許容値を超えるとき移動ロボット2の転倒の判定を行い、転倒調整部58に入力する。
【0039】
該転倒調整部58においては、前記転倒有無判定部57において移動ロボット2の転倒の判定がなされたときには、移動ロボット2の移動試験を中止する。
また、転倒有無判定部57において転倒に近い状態にあることが検知されたときには、転倒調整部58においては、前記ホイスト駆動装置81にホイスト1の修正移動動作を指令し、あるいはロボット移動装置91に移動ロボット2の修正移動動作を指令し、あるいはワイヤ繰り出し量調整装置82にワイヤ繰り出し量の修正動作を指令する。
かかるホイスト1及び移動ロボット2の修正移動動作並びにワイヤ繰り出し量の修正動作により、移動ロボット2の転倒が回避され、正常な作動が継続される。
【0040】
図6に示す移動ロボット転倒有無判定制御の第2の手段において、前記カメラ10によるターゲット11位置つまり移動ロボット2位置の撮像信号はコントローラ5の画像処理装置54に入力され、該画像処理装置54において電気信号(変位信号)に処理されてロボット位置ずれ変化率算出部59に入力される。
該位置ずれ変化率算出部59においては、前記画像処理装置54からの変位信号に基づき前記ホイスト1と記移動ロボット2との位置ずれ量を算出し、さらに該位置ずれ量を時間で微分して位置ずれ量の時間変化率つまり移動ロボット2とホイスト1とが遠ざかる時間的割合を算出し、転倒有無判定部57に入力する。
【0041】
60は許容位置ずれ変化率設定部で、前記ホイスト1と記移動ロボット2との間の位置ずれ量時間変化率の許容値、つまり前記移動ロボット2の転倒限界の位置ずれ量変化率が設定されている。
前記転倒有無判定部57においては、前記位置ずれ量変化率の検出値と位置ずれ量時間変化率の許容値とを比較し、前記位置ずれ量変化率検出値が位置ずれ量変化率許容値を超えるとき移動ロボット2の転倒の判定を行い、転倒調整部58に入力する。
該転倒調整部58以後の動作は、図5における第1の手段と同様である。
【0042】
図7に示す移動ロボット転倒有無判定制御の第3の手段において、前記ワイヤ張力センサ7からのワイヤ張力の検出信号はコントローラ5の転倒有無判定部57に入力される。61は許容ワイヤ張力設定部で、ワイヤ張力の許容値つまり前記移動ロボット2の転倒限界のワイヤ張力が設定されている。
前記転倒有無判定部57においては、前記ワイヤ張力の検出値とワイヤ張力の許容値とを比較し、該ワイヤ張力検出値がワイヤ張力許容値位置を超えるとき移動ロボット2の転倒の判定を行い、転倒調整部58に入力する。
該転倒調整部58以後の動作は、図5における第1の手段と同様である。
【0043】
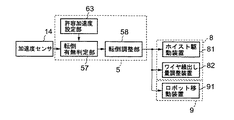
図8に示す移動ロボット転倒有無判定制御の第4の手段において、加速度センサ14からの移動ロボット2移動加速度の検出信号は前記コントローラ5の転倒有無判定部57に入力される。63は許容加速度設定部で、移動ロボット2移動加速度の許容値つまり前記移動ロボット2の転倒限界となる移動加速度が設定されている。
前記転倒有無判定部57においては、前記移動加速度の検出値と移動加速度の許容値とを比較し、該移動加速度の検出値が移動加速度の許容値を超えるとき移動ロボット2の転倒の判定を行い、転倒調整部58に入力する。
該転倒調整部58以後の動作は、図5における第1の手段と同様である。
【0044】
かかる移動ロボット転倒有無判定制御の第1〜第4の手段によれば、移動ロボット2とワイヤ3を介して連携移動せしめられるホイスト1を、コントローラ5によって該移動ロボット2の転倒を確認あるいは予知し得る検知信号即ち移動ロボット2の移動状態検知信号あるいはワイヤ3の張力状態検知信号に基づき該移動ロボットの転倒の有無を判定するので、該移動ロボット2の転倒の有無あるいは転倒可能性を自動的にかつ随時確実に検知することができ、移動ロボット2の転倒の際における復元措置あるいは移動試験の中止を的確に行うことができる。本発明は前記クローラ走行ロボットに限らず、2足歩行ロボット、車輪走行ロボット等、ロボットとホイストとがワイヤを介して連携移動せしめるようにした移動ロボットに広く適用できる。
【0045】
【発明の効果】
以上記載の如く請求項1〜5及び請求項11〜12の発明によれば、移動ロボットと該移動ロボットにワイヤを介して連結されたホイストとを、該移動ロボットの移動検出信号あるいは移動ロボットの移動設定信号に基づきコントローラによって該ホイストを移動ロボットの移動に追従させて2軸方向に走行させあるいはワイヤ長さを調整することにより、該移動ロボットに転倒が発生せずかつ移動ロボットに無用な外力が作用することのない適正な相対位置関係を保持して、人為的操作を一切必要とすることなく自動的に連携移動せしめることができる。
また移動ロボットの移動路に階段等の上下段差がある場合にも移動ロボットとホイストとを連結しているワイヤ自体の長さ及び張力調整を容易にできるため、移動ロボットはワイヤに引っ張られることで転倒することなく段差移動をスムーズに行うことができる。
【0046】
また請求項6〜10及び請求項13の発明によれば、移動ロボットとワイヤを介して連携移動せしめられるホイストを、コントローラによって該移動ロボットの転倒を確認あるいは予知し得る検知信号即ち移動ロボットの移動状態検知信号あるいはワイヤの張力状態検知信号に基づき移動ロボットの転倒の有無を判定するので、該移動ロボットの転倒の有無あるいは転倒可能性を自動的にかつ随時確実に検知することができ、移動ロボットの転倒の際における復元措置あるいは移動試験の中止を的確に行うことができる。また移動ロボットの転倒可能性を検知可能であるので、移動ロボットとホイストとの連携移動操作及びワイヤの長さ調整等の移動ロボットの転倒防止措置を迅速に行うことができる。
【図面の簡単な説明】
【図1】本発明の実施例に係るクローラ式移動ロボットの転倒防止装置の全体構成図である。
【図2】前記実施例における移動ロボット及びホイストの移動制御の第1例を示す制御ブロック図である。
【図3】前記実施例における移動ロボット及びホイストの移動制御の第2例を示す制御ブロック図である。
【図4】前記実施例における移動ロボット及びホイストの移動制御の第3例を示す制御ブロック図である。
【図5】前記実施例における移動ロボット及びホイストの転倒判定制御の第1例を示す制御ブロック図である。
【図6】前記実施例における移動ロボット及びホイストの転倒判定制御の第2例を示す制御ブロック図である。
【図7】前記実施例における移動ロボット及びホイストの転倒判定制御の第3例を示す制御ブロック図である。
【図8】前記実施例における移動ロボット及びホイストの転倒判定制御の第4例を示す制御ブロック図である。
【図9】従来技術を示す図1対応図である。
【符号の説明】
1 ホイスト
2 移動ロボット
3 ワイヤ
4、4a 走行レール
5、05 コントローラ
7 ワイヤ張力センサ
8 ホイスト制御ボックス
9 ロボット制御ボックス
10 カメラ
12 ロボット位置センサ
13 傾斜角センサ
14 加速度センサ
15 ホイスト位置センサ
51 位置ずれ量算出部
52 ホイスト移動条件算出部
53 ワイヤ張力調整値算出部
56 許容傾斜角設定部
57 転倒有無判定部
58 転倒調整部
59 ロボット位置ずれ変化率算出部
60 許容位置ずれ変化率設定部
62 ロボット移動マップ設定部
63 許容加速度設定部
81 ホイスト駆動装置
82 ワイヤ繰出し量調整装置
91 ロボット駆動装置
Claims (13)
- 移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるようにした移動ロボットの転倒防止方法において、前記移動ロボットを2軸方向に移動せしめ、前記ホイストを、前記移動ロボットの移動検知信号あるいは移動設定信号により該移動ロボットの移動に追従させて前記2軸方向に走行させることを特徴とする移動ロボットの転倒防止方法。
- 前記移動ロボットの移動及び前記ホイストの走行時において、前記ホイストと移動ロボットの相対位置が所定量以内になるように前記ワイヤ長さを調整することを特徴とする請求項1記載の移動ロボットの転倒防止方法。
- 前記移動ロボットの位置を検出し、該位置検出信号に基づき前記ホイストを該ホイストと前記移動ロボットとの相対位置が所定量以内になるように走行せしめることを特徴とする請求項1または2の何れかの項に記載の移動ロボットの転倒防止方法。
- 前記移動ロボットをカメラにより撮像し、この撮像信号に基づき前記ホイストを該ホイストと前記移動ロボットとの相対位置が所定量以内になるように走行せしめることを特徴とする請求項1または2の何れかの項に記載の移動ロボットの転倒防止方法。
- 前記移動ロボットの移動マップを予め設定し、前記移動ロボット及びホイストを該移動マップに設定された移動ルートに従い移動せしめることを特徴とする請求項1または2の何れかの項に記載の移動ロボットの転倒防止方法。
- 移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるようにした移動ロボットの転倒防止方法において、前記移動ロボットを2軸方向に移動せしめ、該移動ロボットの移動状態検知信号あるいは前記ワイヤの張力状態検知信号に基づき該移動ロボットの転倒の有無を判定することを特徴とする移動ロボットの転倒防止方法。
- 前記移動ロボットの傾斜角を検出し、該傾斜角検出値と予め設定された傾斜角許容値とを比較し、該傾斜角検出値が傾斜角許容値を超えるとき前記移動ロボットの転倒の判定をなすことを特徴とする請求項6記載の移動ロボットの転倒防止方法。
- 前記移動ロボットをカメラにより撮像し、この撮像信号に基づき前記移動ロボットと前記ホイストとの位置ずれ量の時間変化率を算出し、該位置ずれ量時間変化率の算出値が予め設定された位置ずれ量時間変化率の許容値を超えるとき前記移動ロボットの転倒の判定をなすことを特徴とする請求項6記載の移動ロボットの転倒防止方法。
- 前記ワイヤの張力を検出し、該ワイヤ張力の検出値と予め設定されたワイヤ張力の許容値とを比較し、該ワイヤ張力検出値がワイヤ張力許容値を超えるとき前記移動ロボットの転倒の判定をなすことを特徴とする請求項6記載の移動ロボットの転倒防止方法。
- 前記移動ロボットの移動加速度を検出し、該移動加速度の検出値と予め設定された移動加速度の許容値とを比較し、該移動加速度検出値が移動加速度許容値を超えるとき前記移動ロボットの転倒の判定をなすことを特徴とする請求項6記載の移動ロボットの転倒防止方法。
- 移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるように構成された移動ロボットの転倒防止装置において、前記移動ロボットの2軸方向への移動状態を検出するロボット移動状態検出手段と、該検出手段から入力される前記ロボット移動状態検出信号に基づき、前記ホイストを前記移動ロボットの移動と連携させて前記2軸方向に追従走行させるコントローラを備えてなることを特徴とする移動ロボットの転倒防止装置。
- 前記ワイヤの長さを検出するワイヤ長さ検出手段を設け、前記コントローラは該検出手段から入力される前記ワイヤ長さ検出信号に基づき前記ホイストと移動ロボットとの相対位置が所定量以内になるように前記ワイヤ長さを調整するように構成されてなることを特徴とする請求項11記載の移動ロボットの転倒防止装置。
- 移動ロボットの上部を、該移動ロボットの上方に設置された走行レールに沿って走行するホイストに繰り出し巻き取り自在に巻回されたワイヤの下端部に連結し、前記移動ロボットとホイストとが前記ワイヤを介して連携移動せしめるように構成された移動ロボットの転倒防止装置において、前記移動ロボットの移動状態を検出するロボット移動状態検出手段と、該検出手段から入力される前記ロボット移動状態検出信号と予め設定された前記移動ロボットの転倒条件とを突き合わせて該移動状態の検出信号が該転倒条件を満足したとき前記移動ロボットの転倒の判定を行うコントローラを備えてなることを特徴とする移動ロボットの転倒防止装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002252627A JP2004090126A (ja) | 2002-08-30 | 2002-08-30 | 移動ロボットの転倒防止方法及びその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002252627A JP2004090126A (ja) | 2002-08-30 | 2002-08-30 | 移動ロボットの転倒防止方法及びその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004090126A true JP2004090126A (ja) | 2004-03-25 |
| JP2004090126A5 JP2004090126A5 (ja) | 2005-04-14 |
Family
ID=32058854
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002252627A Pending JP2004090126A (ja) | 2002-08-30 | 2002-08-30 | 移動ロボットの転倒防止方法及びその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004090126A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006320978A (ja) * | 2005-05-17 | 2006-11-30 | Kawada Kogyo Kk | 移動ロボットの補助装置および移動ロボットの補助方法 |
| JP2011031375A (ja) * | 2009-08-06 | 2011-02-17 | Honda Motor Co Ltd | 2足移動体の補助装置 |
| KR101246180B1 (ko) | 2011-11-11 | 2013-03-25 | 삼성중공업 주식회사 | 케이블 제어장치 및 그 방법 |
| KR101429972B1 (ko) | 2007-12-21 | 2014-08-18 | 재단법인 포항산업과학연구원 | 수강 대차의 전원 케이블의 장수명화를 위한 케이블 권취장치 및 케이블 권취 방법 |
| CN104369198A (zh) * | 2014-11-04 | 2015-02-25 | 西安巨浪精密机械有限公司 | 一种机器人多向防撞装置 |
| JP2017056527A (ja) * | 2015-09-17 | 2017-03-23 | 株式会社キトー | 移動体転倒防止装置 |
| CN110068470A (zh) * | 2019-04-15 | 2019-07-30 | 南方电网科学研究院有限责任公司 | 绝缘子检测机器人的爬行能力测试装置与方法 |
-
2002
- 2002-08-30 JP JP2002252627A patent/JP2004090126A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006320978A (ja) * | 2005-05-17 | 2006-11-30 | Kawada Kogyo Kk | 移動ロボットの補助装置および移動ロボットの補助方法 |
| KR101429972B1 (ko) | 2007-12-21 | 2014-08-18 | 재단법인 포항산업과학연구원 | 수강 대차의 전원 케이블의 장수명화를 위한 케이블 권취장치 및 케이블 권취 방법 |
| JP2011031375A (ja) * | 2009-08-06 | 2011-02-17 | Honda Motor Co Ltd | 2足移動体の補助装置 |
| KR101246180B1 (ko) | 2011-11-11 | 2013-03-25 | 삼성중공업 주식회사 | 케이블 제어장치 및 그 방법 |
| CN104369198A (zh) * | 2014-11-04 | 2015-02-25 | 西安巨浪精密机械有限公司 | 一种机器人多向防撞装置 |
| CN104369198B (zh) * | 2014-11-04 | 2016-04-13 | 西安巨浪精密机械有限公司 | 一种机器人多向防撞装置 |
| JP2017056527A (ja) * | 2015-09-17 | 2017-03-23 | 株式会社キトー | 移動体転倒防止装置 |
| CN110068470A (zh) * | 2019-04-15 | 2019-07-30 | 南方电网科学研究院有限责任公司 | 绝缘子检测机器人的爬行能力测试装置与方法 |
| CN110068470B (zh) * | 2019-04-15 | 2021-07-30 | 南方电网科学研究院有限责任公司 | 绝缘子检测机器人的爬行能力测试方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FI126857B (en) | Crane control | |
| EP1501754B1 (en) | Methods and apparatus for manipulation of heavy payloads with intelligent assist devices | |
| JP5768828B2 (ja) | ロボットシステム、及び、ロボットシステムの制御方法 | |
| JPH0663876A (ja) | 移動ロボットの制御装置 | |
| EP3828120B1 (en) | Crane and control system for crane | |
| US10486944B2 (en) | Operation control apparatus for crane | |
| JP2008006517A (ja) | 外力検知方法およびマニピュレータ制御方法 | |
| JP2004090126A (ja) | 移動ロボットの転倒防止方法及びその装置 | |
| WO2019138616A1 (ja) | 巻上げ機 | |
| JP4293874B2 (ja) | ボーディングブリッジ及びボーディングブリッジの目標位置の設定方法 | |
| JPH07160334A (ja) | 走行ロボットの凹凸路面走行制御装置 | |
| JP2009178788A (ja) | 移動ロボットの転倒防止システムおよび転倒防止装置 | |
| JP4220852B2 (ja) | トランスファークレーン | |
| CN113443534B (zh) | 升降通道内作业装置及其姿势稳定化方法 | |
| JP2004107041A (ja) | 吊荷装置 | |
| JP6467321B2 (ja) | 移動体転倒防止装置 | |
| JP2004001907A (ja) | 高所作業車の転倒防止装置 | |
| JP2004330871A (ja) | ボーディングブリッジ | |
| JP2000143147A (ja) | クレーン装置 | |
| JP2001247289A (ja) | ケーブルクレーンのバケット制御システム | |
| JPWO2021084650A1 (ja) | 旅客搭乗橋 | |
| CN114572216B (zh) | 驱动系统的调节方法、调节装置、清洗设备及存储介质 | |
| US20230373761A1 (en) | Crane, crane characteristic change determination device, and crane characteristic change determination system | |
| JP2003226485A (ja) | クレーンの走行制御方法及び走行制御装置 | |
| JPH10217952A (ja) | 傾斜部用作業台車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20040531 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A521 | Written amendment |
Effective date: 20040603 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050715 |
|
| A02 | Decision of refusal |
Effective date: 20051111 Free format text: JAPANESE INTERMEDIATE CODE: A02 |