JP2004015902A - モータの制御装置、モータ、電気機器及びモータの制御方法 - Google Patents
モータの制御装置、モータ、電気機器及びモータの制御方法 Download PDFInfo
- Publication number
- JP2004015902A JP2004015902A JP2002164884A JP2002164884A JP2004015902A JP 2004015902 A JP2004015902 A JP 2004015902A JP 2002164884 A JP2002164884 A JP 2002164884A JP 2002164884 A JP2002164884 A JP 2002164884A JP 2004015902 A JP2004015902 A JP 2004015902A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- control
- width
- pulse width
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Landscapes
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【解決手段】モータ5の回転数制御を行うモータの制御装置であって、前記モータの回転数偏差23iに基づいて、前記モータを駆動する駆動信号のパルス幅Bを制御する第1制御部25と、前記モータの回転数偏差に基づいて、前記駆動信号の通電幅Aを制御する第2制御部26と、前記第1制御部による前記パルス幅の制御、及び前記第2制御部による前記通電幅の制御のいずれか一方に切換える切換え部31とを備えている。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、モータの制御装置に関し、特に、キャリア高調波が低減され、モータの効率が向上するブラシレスDCモータの制御装置に関する。
【0002】
【従来の技術】
近年、小型空気調和装置(エアコン)の圧縮機駆動用モータには、ほとんどの場合、インバータ制御によるブラシレスDCモータが使用されるようになってきた。このブラシレスDCモータの本体部分は、同期電動機の構造となっており、磁極位置の検出により印加する電圧および周波数をインバータによって制御して閉ループ運転を行い、所定のトルクを発生し、所定の回転速度で回転する。
【0003】
電圧形インバータを用いてブラシレスDCモータを駆動するシステムは、主に、空気調和機、電気掃除機、電気洗濯機等のように、省電力化(高効率化)が要求され、かつ大量に生産される機器に搭載される。このため、インバータ部の波形制御として、制御の容易さの観点から、120°通電波形を採用し、かつ構成が簡単で安価なシステムが採用されている。
【0004】
図13は、従来の圧縮機駆動用ブラシレスDCモータの構成を示すブロック図である。図13では、インバータ部4による各相の電圧は120°の通電角に固定されていた。
【0005】
図14は、図13の圧縮機駆動用ブラシレスDCモータの制御装置の構成を示すブロック図である。インバータ部4には、U、V、W位相切換え部が含まれている。位置検出部10aは、ブラシレスDCモータ5の誘起電圧に基づいてモータ5の回転角度を検出する。
【0006】
図15及び図16は、図13及び図14の位置検出器10aの構成を示している。位置検出器10aは、モータ5のY(スター)接続電機子巻線51U、51V及び51Wへの入力信号を取り込むことによって非通電期間に発生する各相の誘起電圧を互いに比較して得られる電気回転速度の1倍の周波数の信号から磁極位置を検出する。即ち、入力された各相U、V、Wの電圧は、それぞれU、V、W相電圧分圧部70Aによって分圧された後、ローパスフィルタ部70に入力される。ローパスフィルタ部70から出力された各相に対応する電圧は、オペアンプ71、72、73によって比較され、それぞれの出力がインバータ制御回路9のマイコン90に供給される。この位置検出器10aは、インバータ部4が120°通電で非通電期間が60°の場合に用いられる。
【0007】
図14に示すように、位置検出器10aによって検出された回転角度S1は、インバータ部4のU、V、W位相切換え部と、回転数検出部10bに送られる。回転数検出部10bは、回転角度S1に基づいてモータ5の回転数を検出する。
【0008】
減算部13は、モータ5の指令(目標)回転数と、回転数検出部10bによって検出されるモータ5の実回転数との偏差13iを算出する。PI補償部(PI制御部)14は、この回転数偏差13iに比例・積分補償を施すものであり、モータ5の回転数偏差13iの平均値に対応する電圧を、パルス幅電圧指令14iとして、インバータ部4のU、V、W位相切換え部に出力する。
【0009】
インバータ部4のU、V、W位相切換え部は、PWM信号生成手段を内蔵し、位置検出部10aによって検出される回転角度S1と上記パルス幅電圧指令14iとに基づいて、該パルス幅電圧指令信号をU、V、W電圧制御信号に変換する。このU、V、W電圧制御信号がインバータに送られる。
【0010】
上記のように、従来、モータ5の回転数制御は、図17に示すように、通電幅が120°に固定され、上記パルス幅電圧指令に基づくパルス幅の制御で実施されていた。
【0011】
図18(a)は、暖房定格付近でのインバータ部4から出力される電圧の波形を示しており、通電角が120°であり、その暖房定格付近の回転数に対応して制御されたパルス幅を有している。図18(b)は、従来の通電幅120°一定でパルス幅を制御する方法での、暖房定格付近での電圧スペクトルを示している。上記従来の方法では、暖房定格(図18(b)参照)及び冷房定格付近でインバータ部4から出力される電圧に対応する信号には、キャリア高調波が多く含まれている。
【0012】
【発明が解決しようとする課題】
モータの損失は、銅損失と鉄損失からなるがいずれも、キャリア高調波が多く含まれていると、その分キャリア高調波で発生する損失が大きくなり、モータの効率が悪化する。
【0013】
また、図15及び図16に示す位置検出器10aは、通電幅が120°以上の場合には、磁極位置の検出を精度良く行うことができないという問題がある。
【0014】
なお、再公表特許WO95/27328号公報には、ブラシレスDCモータを電圧形インバータで駆動するに当たって、電圧形インバータの通電幅を120°よりも大きく180°以下の所定幅に設定することにより、簡単かつ安価な制御でブラシレスDCモータの高効率化および運転範囲の拡大を達成する技術が示されている。
【0015】
また、特開平8−196096号公報には、インバータ通電角を120°以上180°未満に設定する通電角制御手段を備えたブラシレスDCモータ駆動用インバータ装置が記載されている。
【0016】
また、特公平5−72197号公報には、次のブラシレスモータの制御装置が開示されている。即ち、3相Y結線に接続された電機子コイルと、この電機子コイルに対して並列状態でY結線に接続される抵抗回路と、前記電機子コイルの中性点と前記抵抗回路の中性点との間の電位差変動に対応して前記電機子コイルに対する励磁電流を切換え制御する励磁切換え信号を発生する信号発生手段と、この信号発生手段の励磁切換え信号に対応して、前記電機子コイルに対する励磁電流を切換え制御するインバータ回路と、このインバータ回路により前記電機子コイルに対する励磁電流を切換えて回転するとともに、複数極の永久磁石からなる回転子と、起動時に2相の前記電機子コイルに励磁電流を流し、残りの1相の前記電機子コイルに前記回転子の振動により発生する誘起電圧の極性を検出する第1の検出手段と、この第1の検出手段による誘起電圧の特定の極性と、前記信号発生手段の励磁切換え信号とから、前記回転子の起動位置を検出し、前記インバータ回路にモータ起動信号を入力する第2の検出手段と、を有するブラシレスモータの制御装置が記載されている。
【0017】
本発明の目的は、モータの損失が低減し、モータの効率が向上するモータの制御装置を提供することである。
本発明の他の目的は、キャリア高調波が低減され、モータの効率が向上するモータの制御装置を提供することである。
本発明の更に他の目的は、通電幅を任意の角度に制御可能であり、モータの効率が向上するモータの制御装置を提供することである。
本発明の更に他の目的は、磁極位置の検出を精度良く行いつつ、通電幅を任意の角度に制御可能であり、キャリア高調波が低減され、モータの効率が向上するモータの制御装置を提供することである。
【0018】
【課題を解決するための手段】
以下に、[発明の実施の形態]で使用する番号・符号を用いて、[課題を解決するための手段]を説明する。これらの番号・符号は、[特許請求の範囲]の記載と[発明の実施の形態]の記載との対応関係を明らかにするために付加されたものであるが、[特許請求の範囲]に記載されている発明の技術的範囲の解釈に用いてはならない。
【0019】
モータの制御装置は、モータ(5)の回転数制御を行うモータの制御装置であって、前記モータ(5)の回転数偏差(23i)に基づいて、前記モータ(5)を駆動する駆動信号のパルス幅(B)を制御する第1制御部(25)と、前記モータ(5)の回転数偏差(24i)に基づいて、前記駆動信号の通電幅(A)を制御する第2制御部(26)と、前記第1制御部(25)による前記パルス幅(B)の制御、及び前記第2制御部(26)による前記通電幅(A)の制御のいずれか一方に切換える切換え部(31)とを備えている。
【0020】
本発明のモータの制御装置において、前記切換え部(31)は、前記第1制御部(25)により制御された前記パルス幅(B)が第1設定値になったときに、前記第1制御部(25)による前記パルス幅(B)の制御から前記第2制御部(26)による前記通電幅(A)の制御に切換え、前記第2制御部(26)により制御された前記通電幅(A)が第2設定値になり前記第1制御部(25)により制御された前記パルス幅(B)が前記第1設定値でなくなったときに、前記第2制御部(26)による前記通電幅(A)の制御から、前記第1制御部(25)による前記パルス幅(B)の制御に切換える。
【0021】
本発明のモータの制御装置において、更に、前記モータ(5)の誘起電圧の3次高調波を検出して前記モータ(5)の磁極位置を検出する位置検出手段(20a)を備えている。
【0022】
本発明のモータの制御装置において、前記モータ(5)は、Y(スター)接続の電機子巻線を有するブラシレスDCモータであり、前記位置検出手段(20a)は、前記Y(スター)接続された前記電機子巻線(51U、51V、51W)のうちの所定の相の前記電機子巻線(51U)間に接続された抵抗(53)によって分圧された分圧点と、前記Y(スター)接続された前記電機子巻線(51U、51V、51W)の入力端子に並列に結線されたY(スター)接続の抵抗のうちの前記所定の相の前記抵抗の中間タップによる分圧点との間の電位差変動を検出して前記モータ(5)の磁極位置を検出する。
【0023】
本発明のモータの制御装置において、更に、前記モータ(5)の誘起電圧の基本波を検出して前記モータ(5)の磁極位置を検出する基本波位置検出手段(110)を備え、前記第1制御部(25)による前記パルス幅(B)の制御及び前記第2制御部(26)による前記通電幅(A)の制御のうちの切換えられた一方に応じて、前記位置検出手段(20a)及び前記基本波位置検出手段(110)のいずれか一方が使用される。
【0024】
本発明のモータは、上記本発明のモータの制御装置によって回転数制御が行われるモータ(5)である。
【0025】
本発明の電気機器は、上記本発明のモータ(5)を駆動源として採用することを特徴とする電気機器である。
【0026】
本発明のモータの制御方法は、モータ(5)の回転数制御を行うモータの制御方法であって、前記モータ(5)の回転数偏差(23i)に基づいて、前記モータ(5)を駆動する駆動信号のパルス幅(B)を制御する第1制御ステップと、前記モータの回転数偏差(23i)に基づいて、前記駆動信号の通電幅(A)を制御する第2制御ステップと、前記第1制御ステップによる前記パルス幅(B)の制御、及び前記第2制御ステップによる前記通電幅(A)の制御のいずれか一方に切換える切換えステップとを備えている。
【0027】
本発明のモータの制御方法において、前記切換えステップは、前記第1制御ステップにより制御された前記パルス幅(B)が第1設定値になったときに、前記第1制御ステップによる前記パルス幅(B)の制御から前記第2制御ステップによる前記通電幅(A)の制御に切換え、前記第2制御ステップにより制御された前記通電幅(A)が第2設定値になり前記第1制御ステップにより制御された前記パルス幅(B)が前記第1設定値でなくなったときに、前記第2制御ステップによる前記通電幅(A)の制御から、前記第1制御ステップによる前記パルス幅(B)の制御に切換える。
【0028】
本発明のモータの制御方法において、更に、前記モータ(5)の誘起電圧の3次高調波を検出して前記モータ(5)の磁極位置を検出する位置検出ステップを備えている。
【0029】
本発明のモータの制御方法において、前記モータ(5)は、Y(スター)接続の電機子巻線を有するブラシレスDCモータであり、前記位置検出ステップは、前記Y(スター)接続された前記電機子巻線(51U、51V、51W)のうちの所定の相の前記電機子巻線(51U)間に接続された抵抗(53)によって分圧された分圧点と、前記Y(スター)接続された前記電機子巻線(51U、51V、51W)の入力端子に並列に結線されたY(スター)接続の抵抗のうちの前記所定の相の前記抵抗の中間タップによる分圧点との間の電位差変動を検出して前記モータ(5)の磁極位置を検出する。
【0030】
本発明のモータの制御方法において、更に、前記モータ(5)の誘起電圧の基本波を検出して前記モータ(5)の磁極位置を検出する基本波位置検出ステップを備え、前記第1制御ステップによる前記パルス幅(B)の制御及び前記第2制御ステップによる前記通電幅(A)の制御のうちの切換えられた一方に応じて、前記位置検出ステップ及び前記基本波位置検出ステップのいずれか一方の結果が使用される。
【0031】
【発明の実施の形態】
以下、添付図面を参照して、本発明のモータの制御装置の一の実施形態について説明する。本実施形態のモータの制御装置が適用されるモータは、特に制限されないが、特にその適用が好適な例として、小型空気調和装置(エアコン)の圧縮機駆動用モータとして用いられる、インバータ制御によるブラシレスDCモータが挙げられる。
【0032】
図10は、本実施形態によるブラシレスDCモータの構成を示すブロック図である。この図において、符号1は、交流電源であり、コンバータ部2で直流電力に変換した後、平滑コンデンサ3によって平滑化される。平滑化された直流電力は、インバータ制御回路9の制御によりインバータ部4において交流電力に逆変換されモータ5を駆動する。
【0033】
コンバータ部2によって直流電力が供給される端子間に3対のスイッチングトランジスタ41U、42U、41V、42V、41W、42Wをそれぞれ直列接続してインバータ部4を構成し、各対のスイッチングトランジスタ同士の接続点電圧をブラシレスDCモータ5の、Y接続された各相の固定子巻線51U、51V、51Wにそれぞれ印加している。そして、各対のスイッチングトランジスタ同士の接続点電圧をY接続された抵抗61U、61V、61Wにもそれぞれ印加している。なお、スイッチングトランジスタ41U、42U、41V、42V、41W、42Wのコレクタ−エミッタ端子間にそれぞれ保護用のダイオード41Ud、42Ud、41Vd、42Vd、41Wd、42Wdが接続されている。
【0034】
本実施形態では、図3に示すように、DCブラシレスモータ5の回転数制御がある回転数までは通電幅を120°にしたパルス幅の制御で実施し、それ以上の回転数になると、通電幅を広角にした通電幅制御で実施する。
【0035】
図4(a)は、本実施形態において、モータ5の回転数が暖房定格付近でのインバータ部4からモータ5に出力される信号の電圧波形を示し、図4(b)は、その信号の電圧スペクトルを示している。
【0036】
図3に示すように、暖房定格付近のモータ5の回転数では、120°通電幅のパルス幅制御から、通電幅制御に切り換えられることから、図4(a)では、通電幅が120°でパルス幅が最大値であることが示されている(詳細は後述する)。
図4(b)に示すように、暖房定格付近でのインバータ部4から出力される電圧に対応する信号には、図18(b)と比べて、キャリア高調波が少なくなっている。
【0037】
図2は、インバータ部4から出力される電圧波形を示したものであり、通電幅、パルス幅、回転角度はそれぞれ、その電圧波形において符号A、B、Cで示される。
【0038】
本実施形態のように、電圧形インバータを用いてブラシレスDCモータ5を駆動するシステムにおいては、通電幅Aが120°であるとは、1周期に正負それぞれの電気角が180°あるうちの電気角120°分だけインバータの各相スイッチを導通させるという意味である。
【0039】
図3において、120度通電のパルス幅制御とは、通電幅Aが120°のまま、パルス幅Bを制御することである。また、図3において、通電幅制御とは、パルス幅Bを最大値にしたまま(等幅PWM)、通電幅Aを制御することである。
【0040】
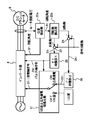
図1は、図10に示した本実施形態の圧縮機駆動用ブラシレスDCモータの制御装置の構成を示すブロック図である。図14と同様の構成要素については、同じ符号を付し、その詳細な説明を省略する。なお、図1のインバータ部4には、図14と同様に、U、V、W位相切換え部が含まれており、そのU、V、W位相切換え部は、PWM信号生成手段を内蔵している。
【0041】
図1に示すように、位置検出器20aによって検出された回転角度S1は、インバータ部4のU、V、W位相切換え部と、回転数検出部20bに送られる。回転数検出部20bは、回転角度S1に基づいてモータ5の回転数を検出する。なお、位置検出器20aについては、後述する。
【0042】
通電幅切換え部31は、図3を参照して上述したように、通電幅を120°か、広角通電のいずれかに切り換える。
【0043】
減算部23は、モータ5の指令(目標)回転数と、回転数検出部20bによって検出されるモータ5の実回転数との偏差23iを算出する。第1のPI補償部(第1のPI制御部)25は、この回転数偏差23iに比例・積分補償を施すものであり、モータ5の回転数偏差23iの平均値に対応する電圧を、パルス幅電圧指令25iとして、インバータ部4のU、V、W位相切換え部及び通電幅切換え部31に出力する。
【0044】
通電幅切換え部31が広角通電のモードに切り換えられているとき、第1のPI補償部25から出力されるパルス幅電圧指令25iは、通電幅切換え部31に予め設定された最大値のパルス幅を示す信号となっている。
【0045】
減算部24は、モータ5の指令(目標)回転数と、回転数検出部20bによって検出されるモータ5の実回転数との偏差24iを算出する。なお、減算部23と減算部24の機能は同じであり、回転数偏差23iと回転数偏差24iは、同じである。
【0046】
第2のPI補償部(第2のPI制御部)26は、この回転数偏差24iに比例・積分補償を施すものであり、モータ5の回転数偏差24iの平均値に対応する電圧26iを、通電幅切換え部31に出力する。通電幅切換え部31が広角通電のモードに切り換えられているとき、通電幅切換え部31は、第2のPI補償部26から出力された電圧26iを通電幅指令31iとして、インバータ部4のU、V、W位相切換え部に出力する。
【0047】
通電幅切換え部31が広角通電のモードに切り換えられているとき、第2のPI補償部26から出力される通電幅電圧指令26iは、通電幅が120°以上を示す信号となっている。
【0048】
ここで、通電幅切換え部31が通電幅120°のモードに切り換えられているときには、従来と同様にパルス幅の制御によって、モータ5の回転数制御が行われる。即ち、通電幅切換え部31から出力される通電幅指令31iは、120°を示す信号となる。
【0049】
このように、通電幅切換え部31が通電幅120°のモードに設定されているときには、インバータ部4は、120°を示す通電幅指令31iを入力すると共に、位置検出部20aによって検出される回転角度S1と上記パルス幅電圧指令25iとに基づいて、該パルス幅電圧指令信号をU、V、W電圧制御信号に変換する。このU、V、W電圧制御信号がインバータに送られることにより、インバータ部4から出力される信号のパルス幅制御が実行され、それによりモータ5の回転数制御が行われる。
【0050】
一方、通電幅切換え部31が広角通電のモードに切り換えられているときには、モータ5の回転数制御は、パルス幅の制御によってではなく、通電幅を120°以上に制御することによって実施される。即ち、減算部24は、モータ5の指令(目標)回転数と、回転数検出部20bによって検出されるモータ5の実回転数との偏差24iを算出する。
【0051】
第2のPI補償部26は、この回転数偏差24iに比例・積分補償を施すものであり、モータ5の回転数偏差24iの平均値に対応する電圧26iを、通電幅切換え部31に出力する。
【0052】
広角通電のモードに切り換えられている通電幅切換え部31は、第2のPI補償部26から出力された電圧26iを通電幅指令31iとして、インバータ部4のU、V、W位相切換え部に出力する。U、V、W位相切換え部は、その入力した通電幅指令31iと、位置検出部20aによって検出される回転角度S1に基づいて、該通電幅指令信号をU、V、W電圧制御信号に変換する。このU、V、W電圧制御信号がインバータに送られることにより、インバータ部4から出力される信号の通電幅の制御が実行され、それによりモータ5の回転数制御が行われる。
【0053】
この通電幅制御が行われているときに、インバータ部4から出力される電圧波形は、図5に示すように、通電幅120°に対してモータ回転角度方向の前後に均等に広げられることもできるし、図6に示すように、モータ回転角度方向の前方向にのみ広げられることもできる。
【0054】
次に、図9及び図1を参照して、120度(パルス幅制御)と広角通電(通電幅制御)の切換え動作について説明する。
【0055】
(a)120度から広角通電の切換え
通電幅切換え部31は、通電幅が120°のモードのとき、図1のOFFにセットされており、通電幅指令31iとして、120度を示す信号が出力される。通電幅切換え部31は、第1のPI補償部25から出力されるパルス幅指令25iを入力し、そのパルス幅指令25iで指示されるパルス幅が、通電幅切換え部31に予め設定された最大値になったとき、OFFからONに切換える。
第2のPI補償部26は、回転数偏差24iを入力し、その回転数偏差24iに比例・積分補償を施すものであり、モータ5の回転数偏差24iの平均値に対応する電圧26iを、通電幅切換え部31に出力する。ON(広角通電モード)に切り換えられている通電幅切換え部31は、第2のPI補償部26から出力された電圧26iを、通電幅指令31iとして、インバータ部4のU、V、W位相切換え部に出力する。U、V、W位相切換え部は、PWM信号生成手段を内蔵し、位置検出部20aによって検出される回転角度S1と上記通電幅指令31iとに基づいて、該通電幅電圧指令信号をU、V、W電圧制御信号に変換する。このU、V、W電圧制御信号がインバータに送られる。なお、この広角通電のモードでは、パルス幅指令25iで指示されるパルス幅が、通電幅切換え部31に予め設定された最大値である等幅PWM波形となる。
【0056】
(b)広角通電から120度通電の切換え
通電幅切換え部31は、通電幅が広角通電のモードのとき、図1のONの状態であり、通電幅指令31iとして、第2のPI補償部26からの出力値26iをインバータ部4のU、V、W位相切換え部に出力する。
通電幅切換え部31は、第2のPI補償部26からの出力値26iが通電幅120度に対応しているとき、第1のPI補償部25から出力されるパルス幅指令25iを参照し、そのパルス幅指令25iが上記の予め設定された最大値でないときに、ON(広角通電モード)をOFF(120°モード)に切り換える。
【0057】
上記のように、本実施形態では、通電幅が120°のときには、パルス幅制御を採用し従来と同様の制御となっているが、通電幅120°でモータ5の回転数制御が限界となる回転数から、パルス幅制御ではなく、通電幅を広げる通電幅制御で回転数制御を実施する部分が新規である。
【0058】
次に、図1及び図10の磁極位置検出部20aについて説明する。
【0059】
磁極位置検出部20aの構成を図7及び図11に示す。図11は、図10との対応がとられた具体的な回路例であり、図7は、その回路の原理を示している。
【0060】
図13、図15及び図16に示した磁極位置検出部10aがモータ誘起電圧の基本波の検出を行うのに対し、図7及び図11の磁極位置検出部20aは、モータ誘起電圧の3次高調波(電気回転速度の3倍の周波数成分をもつ)の検出を行う。
【0061】
図10及び図11に示すように、U相が基準電位にされ、そのU相基準電位とモータ中性点50との間の電圧Vaが、U相の電機子巻線51Uと並列に接続された抵抗53a(又は抵抗53aの所定の分圧比の中間タップ)によって分圧された電圧53と、そのU相基準電位と抵抗中性点60間を、抵抗中性点回路の抵抗61U(又は抵抗53aの所定の分圧比の中間タップ)によって分圧された電圧61とがオペアンプ(増幅器)80に入力される。
【0062】
上記電圧53がオペアンプ80の非反転入力端子に供給され、上記電圧61がその反転入力端子に供給される。増幅器の出力端子と反転入力端子との間に抵抗80bを接続することにより、差動増幅器として動作する。
【0063】
増幅器80から出力される出力信号は、ローパスフィルタ81に供給される。ローパスフィルタ81からの出力信号は、反転入力端子にモータ中性点50の電圧が供給されたオペアンプ82の非反転入力端子に供給される。オペアンプ82は、ゼロクロスコンパレータとして機能し、その出力端子から磁極位置検出信号が出力される。その磁極位置検出信号は、ブラシレスDCモータ5のロータ52の磁極位置を示している。
【0064】
図7に示すように、磁極位置検出部20aでは、まず、U相擬似電圧検出部91Aにおいて、モータ中性点50とU相基準電位との間の電圧Vaが検出される。その電圧Vaは、分圧部92によって分圧されて上記電圧53が生成される。一方、U相電圧分圧部93では、U相基準電位と抵抗中性点60間の電圧が分圧されてなる上記電位61が生成される。上記電位53と上記電位61は、差動増幅部(オペアンプ)80に入力され、その差動増幅部80からの出力信号がフィルタ部(ローパスフィルタ)81に入力される。そのフィルタ部81からの出力信号がゼロクロス検出部(オペアンプ)82に入力され、そのゼロクロス検出部82からの出力信号に基づいて、モータ5の回転角度を示す回転角度信号S1が生成される。
【0065】
図7及び図11に示した磁極位置検出部20aによれば、通電幅切換え部31により、通電幅を120°から180°まで変化させても磁極位置の検出を精度良く行うことができ、モータ5から有効に出力を取り出すことができる。
【0066】
また、図7及び図11に示すように、3次高調波検出の磁極位置検出部20aは、モータ中性点と抵抗中性点間の差の電圧を直接検出しておらず、また、基準電位にモータ中性点でなく、U相の電圧が使用される。
【0067】
図8は、図7の磁極位置検出部20aの構成に代わる変形例としての磁極位置検出部30aを示している。図12は、図8の磁極位置検出部30aを採用した場合のブラシレスDCモータの構成を示すブロック図である。磁極位置検出部30aは、モータ誘起電圧の基本波の検出を行う回路110と、モータ誘起電圧の3次高調波の検出を行う回路100の2つを有している。
【0068】
図8の構成は、モータ誘起電圧の3次高調波が小さい場合に用いられる。図7の構成は、モータ誘起電圧の3次高調波を検出して磁極位置を検出するものであったが、通電幅が120度のときには、3次高調波が小さいことが考えられるため、図8に示すように、図7の構成(符号100で示す)に代えて、図16の構成(符号110で示す、従来の磁極位置検出部10aと同様の構成)により位置検出を行う。
【0069】
回転角度切換え部41は、パルス幅指令25i(図1参照)に基づいて、通電幅が120度のモードであるか、広角通電のモードであるかを判断して、符号100に示す図7、又は符号110に示す図16の構成のいずれを使用するかを決める。上記のように、パルス幅指令25iに示されるパルス幅が通電幅切換え部31に予め設定されている最大値であれば広角通電モードであり、最大値以外であれば、120°通電モードであると、回転角度切換え部41は、判断する。
【0070】
図8に示す磁極位置検出部30aのうち、符号110で示す部分について図15及び図16を参照して説明する。符号110で示す部分では、モータ5のY(スター)接続電機子巻線51U、51V及び51Wへの入力信号を取り込むことによって非通電期間に発生する各相の誘起電圧を互いに比較して得られる電気回転速度の1倍の周波数の信号から磁極位置を検出する。即ち、入力された各相U、V、Wの電圧は、それぞれU、V、W相電圧分圧部70Aによって分圧された後、ローパスフィルタ部70に入力される。ローパスフィルタ部70から出力された各相に対応する電圧は、オペアンプ71、72、73によって比較され、それぞれの出力がインバータ制御回路9のマイコン90に供給される。この位置検出器10aは、インバータ部4が120°通電で非通電期間が60°の場合に用いられる。図8に示す磁極位置検出部30aのうち、符号100で示す部分は、図7を参照して説明した通りの構成である。
【0071】
図8に示した磁極位置検出部30aによれば、通電幅が120度のときには、3次高調波が小さく磁極位置の検出を行い難い場合に備えて、通電幅が120度のときには、符号110で示す図16の構成(従来の磁極位置検出部10aと同様の構成)により位置検出を精度良く行う。これにより、通電幅切換え部31により、通電幅を120°から180°まで変化させても磁極位置の検出を精度良く行うことができ、モータ5から有効に出力を取り出すことができる。
【0072】
暖房定格及び冷房定格付近の従来のインバータ出力電圧波形は、図18(b)に示すようにキャリア高調波を多く含んでいるが、本実施形態によれば、図4(b)に示すように、インバータ出力電圧波形に含まれるキャリア高調波が低減される。従って、モータの損失は、銅損失と鉄損失からなるが、いずれもキャリア高調波で発生する損失については、本実施形態でキャリア高調波が低減される分、損失が低減し、モータの効率が向上する。
【0073】
【発明の効果】
本発明によれば、モータの効率を向上させることができる。本発明のモータの制御装置の適用先に特に制限はないが、空気調和機のコンプレッサ駆動用モータの制御装置として特に好ましく適用することができる。
【図面の簡単な説明】
【図1】本発明であるモータの制御装置の一の実施の形態の構成を示すブロック図である。
【図2】本発明であるモータの制御装置の一の実施の形態において、インバータから出力される波形を示す図である。
【図3】本発明であるモータの制御装置の一の実施の形態において、モータの回転数とインバータから出力される信号の通電幅の関係を示す図である。
【図4】図4(a)は、本発明であるモータの制御装置の一の実施の形態において、モータの回転数が暖房定格付近においてインバータから出力される信号の波形を示し、図4(b)は、その信号の電圧スペクトルを示す図である。
【図5】本発明であるモータの制御装置の一の実施の形態において、通電幅が制御されたインバータから出力される波形の一例を示す図である。
【図6】本発明であるモータの制御装置の一の実施の形態において、通電幅が制御されたインバータから出力される波形の他の例を示す図である。
【図7】本発明であるモータの制御装置の一の実施の形態において、用いられる位置検出部の一例の構成を示すブロック図である。
【図8】本発明であるモータの制御装置の一の実施の形態において、用いられる位置検出部の他の例の構成を示すブロック図である。
【図9】本発明であるモータの制御装置の一の実施の形態において、120°通電と広角通電の切換えを説明するための図である。
【図10】本発明であるモータの制御装置の一の実施の形態が適用されたDCブラシレスモータ装置の構成示すブロック図である。
【図11】本発明であるモータの制御装置の一の実施の形態において、用いられる位置検出部の一例の構成を示す回路図である。
【図12】本発明であるモータの制御装置の一の実施の形態が適用されたDCブラシレスモータ装置の他の例の構成示すブロック図である。
【図13】従来のモータの制御装置が適用されたDCブラシレスモータ装置の構成示すブロック図である。
【図14】従来のモータの制御装置の一の実施の形態の構成を示すブロック図である。
【図15】従来のモータの制御装置において、用いられる位置検出部の構成を示す回路図である。
【図16】従来のモータの制御装置において、用いられる位置検出部の構成を示すブロック図である。
【図17】従来のモータの制御装置において、モータの回転数とインバータから出力される信号の通電幅の関係を示す図である。
【図18】図18(a)は、従来のモータの制御装置において、モータの回転数が暖房定格付近においてインバータから出力される信号の波形を示し、図18(b)は、その信号の電圧スペクトルを示す図である。
【符号の説明】
1 交流電源
2 コンバータ部
3 平滑コンデンサ
4 インバータ部
5 モータ
6 抵抗中性点回路
9 インバータ制御回路
10a 磁極位置検出部
10b 回転数検出部
13 減算部
13i 偏差
14 PI補償部
14i パルス幅電圧指令
20a 磁極位置検出部
20b 回転数検出部
23 減算部
23i 偏差
24 減算部
24i 偏差
25 第1のPI補償部
25i パルス幅電圧指令
26 第2のPI補償部
26i 電圧(出力値)
30a 磁極位置検出部
31 通電幅切換え部
31i 通電幅指令
41U スイッチングトランジスタ
42U スイッチングトランジスタ
41V スイッチングトランジスタ
42V スイッチングトランジスタ
41W スイッチングトランジスタ
42W スイッチングトランジスタ
41Ud ダイオード
42Ud ダイオード
41Vd ダイオード
42Vd ダイオード
41Wd ダイオード
42Wd ダイオード
50 電機子巻線の中性点(モータ中性点)
51U 電機子巻線
51V 電機子巻線
51W 電機子巻線
52 ロータ
53 電圧
53a 抵抗
60 抵抗中性点回路の中性点
61 電圧
61U 抵抗
61V 抵抗
61W 抵抗
70 ローパスフィルタ部
70A U、V、W相電圧分圧部
71 オペアンプ
72 オペアンプ
73 オペアンプ
80 オペアンプ(増幅器)
80b 抵抗
81 ローパスフィルタ
82 ゼロクロス検出部(オペアンプ)
90 マイコン
91A U相擬似電圧検出部
92 分圧部
93 U相電圧分圧部
A 通電幅
B パルス幅
C 回転角度
S1 回転角度(信号)
Va U相基準電位とモータ中性点との間の電圧
Claims (12)
- モータの回転数制御を行うモータの制御装置であって、
前記モータの回転数偏差に基づいて、前記モータを駆動する駆動信号のパルス幅を制御する第1制御部と、
前記モータの回転数偏差に基づいて、前記駆動信号の通電幅を制御する第2制御部と、
前記第1制御部による前記パルス幅の制御、及び前記第2制御部による前記通電幅の制御のいずれか一方に切換える切換え部とを備えたモータの制御装置。 - 請求項1記載のモータの制御装置において、
前記切換え部は、前記第1制御部により制御された前記パルス幅が第1設定値になったときに、前記第1制御部による前記パルス幅の制御から前記第2制御部による前記通電幅の制御に切換え、前記第2制御部により制御された前記通電幅が第2設定値になり前記第1制御部により制御された前記パルス幅が前記第1設定値でなくなったときに、前記第2制御部による前記通電幅の制御から、前記第1制御部による前記パルス幅の制御に切換える
モータの制御装置。 - 請求項1または2に記載のモータの制御装置において、
更に、
前記モータの誘起電圧の3次高調波を検出して前記モータの磁極位置を検出する位置検出手段
を備えた
モータの制御装置。 - 請求項3記載のモータの制御装置において、
前記モータは、Y(スター)接続の電機子巻線を有するブラシレスDCモータであり、
前記位置検出手段は、前記Y(スター)接続された前記電機子巻線のうちの所定の相の前記電機子巻線間に接続された抵抗によって分圧された分圧点と、前記Y(スター)接続された前記電機子巻線の入力端子に並列に結線されたY(スター)接続の抵抗のうちの前記所定の相の前記抵抗の中間タップによる分圧点との間の電位差変動を検出して前記モータの磁極位置を検出する
モータの制御装置。 - 請求項3または4に記載のモータの制御装置において、
更に、
前記モータの誘起電圧の基本波を検出して前記モータの磁極位置を検出する基本波位置検出手段を備え、
前記第1制御部による前記パルス幅の制御及び前記第2制御部による前記通電幅の制御のうちの切換えられた一方に応じて、前記位置検出手段及び前記基本波位置検出手段のいずれか一方が使用される
モータの制御装置。 - 請求項1から5のいずれか1項に記載のモータの制御装置によって回転数制御が行われるモータ。
- 請求項6記載のモータを駆動源として採用することを特徴とする電気機器。
- モータの回転数制御を行うモータの制御方法であって、
前記モータの回転数偏差に基づいて、前記モータを駆動する駆動信号のパルス幅を制御する第1制御ステップと、
前記モータの回転数偏差に基づいて、前記駆動信号の通電幅を制御する第2制御ステップと、
前記第1制御ステップによる前記パルス幅の制御、及び前記第2制御ステップによる前記通電幅の制御のいずれか一方に切換える切換えステップと
を備えたモータの制御方法。 - 請求項8記載のモータの制御方法において、
前記切換えステップは、前記第1制御ステップにより制御された前記パルス幅が第1設定値になったときに、前記第1制御ステップによる前記パルス幅の制御から前記第2制御ステップによる前記通電幅の制御に切換え、前記第2制御ステップにより制御された前記通電幅が第2設定値になり前記第1制御ステップにより制御された前記パルス幅が前記第1設定値でなくなったときに、前記第2制御ステップによる前記通電幅の制御から、前記第1制御ステップによる前記パルス幅の制御に切換える
モータの制御方法。 - 請求項8または9に記載のモータの制御方法において、
更に、
前記モータの誘起電圧の3次高調波を検出して前記モータの磁極位置を検出する位置検出ステップ
を備えた
モータの制御方法。 - 請求項10記載のモータの制御方法において、
前記モータは、Y(スター)接続の電機子巻線を有するブラシレスDCモータであり、
前記位置検出ステップは、前記Y(スター)接続された前記電機子巻線のうちの所定の相の前記電機子巻線間に接続された抵抗によって分圧された分圧点と、前記Y(スター)接続された前記電機子巻線の入力端子に並列に結線されたY(スター)接続の抵抗のうちの前記所定の相の前記抵抗の中間タップによる分圧点との間の電位差変動を検出して前記モータの磁極位置を検出する
モータの制御方法。 - 請求項10または11に記載のモータの制御方法において、
更に、
前記モータの誘起電圧の基本波を検出して前記モータの磁極位置を検出する基本波位置検出ステップを備え、
前記第1制御ステップによる前記パルス幅の制御及び前記第2制御ステップによる前記通電幅の制御のうちの切換えられた一方に応じて、前記位置検出ステップ及び前記基本波位置検出ステップのいずれか一方の結果が使用される
モータの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002164884A JP4052442B2 (ja) | 2002-06-05 | 2002-06-05 | モータの制御装置、モータ、電気機器及びモータの制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002164884A JP4052442B2 (ja) | 2002-06-05 | 2002-06-05 | モータの制御装置、モータ、電気機器及びモータの制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004015902A true JP2004015902A (ja) | 2004-01-15 |
| JP4052442B2 JP4052442B2 (ja) | 2008-02-27 |
Family
ID=30432909
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002164884A Expired - Fee Related JP4052442B2 (ja) | 2002-06-05 | 2002-06-05 | モータの制御装置、モータ、電気機器及びモータの制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4052442B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009509494A (ja) * | 2005-09-23 | 2009-03-05 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 半導体出力最終段を介して電子的に整流される直流電流モータの電流供給方法 |
| WO2017159214A1 (ja) * | 2016-03-16 | 2017-09-21 | 株式会社ミツバ | モータ制御装置及びモータユニット |
| JP2018042386A (ja) * | 2016-09-08 | 2018-03-15 | 株式会社デンソー | 回転角推定装置及びエンジン始動装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104169088A (zh) * | 2012-11-29 | 2014-11-26 | 广东汕樟轻工机械有限公司 | 直联式伺服电机传动结构及其控制系统 |
-
2002
- 2002-06-05 JP JP2002164884A patent/JP4052442B2/ja not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009509494A (ja) * | 2005-09-23 | 2009-03-05 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 半導体出力最終段を介して電子的に整流される直流電流モータの電流供給方法 |
| WO2017159214A1 (ja) * | 2016-03-16 | 2017-09-21 | 株式会社ミツバ | モータ制御装置及びモータユニット |
| CN108778856A (zh) * | 2016-03-16 | 2018-11-09 | 株式会社美姿把 | 电动机控制装置和电动机单元 |
| US20190047517A1 (en) * | 2016-03-16 | 2019-02-14 | Mitsuba Corporation | Motor control apparatus and motor unit |
| JP2018042386A (ja) * | 2016-09-08 | 2018-03-15 | 株式会社デンソー | 回転角推定装置及びエンジン始動装置 |
| WO2018047664A1 (ja) * | 2016-09-08 | 2018-03-15 | 株式会社デンソー | 回転角推定装置及びエンジン始動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4052442B2 (ja) | 2008-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Kim et al. | Commutation torque ripple reduction in a position sensorless brushless DC motor drive | |
| JP3931079B2 (ja) | 電動機駆動装置及びそれを用いた冷凍装置 | |
| US7839113B2 (en) | Apparatus and method for driving synchronous motor | |
| US6642681B2 (en) | Starting control method of and control apparatus for synchronous motor, and air conditioner, refrigerator, washing machine and vacuum cleaner each provided with the control apparatus | |
| JP6167982B2 (ja) | モータ駆動装置および電動圧縮機 | |
| JP3888082B2 (ja) | モータ装置およびその制御方法 | |
| JP4406552B2 (ja) | 電動機の制御装置 | |
| JP6463966B2 (ja) | モータ駆動装置およびモータ駆動用モジュール並びに冷凍機器 | |
| JP2008206386A (ja) | インバータ装置 | |
| CN112913136A (zh) | 电动机控制装置 | |
| AU2018295871B2 (en) | Motor drive apparatus | |
| JP4590761B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2020005472A (ja) | 電動機の制御装置 | |
| JP4679487B2 (ja) | モータ制御装置並びに冷凍空調装置 | |
| JP4052442B2 (ja) | モータの制御装置、モータ、電気機器及びモータの制御方法 | |
| JP2009273302A (ja) | 電動モータの制御装置 | |
| JP2003111480A (ja) | 電動機駆動装置 | |
| JP4531180B2 (ja) | 同期モータおよび同期モータの起動方法 | |
| JP4448300B2 (ja) | 同期機の制御装置 | |
| JP4389746B2 (ja) | インバータ制御装置 | |
| JP2009254191A (ja) | モータ制御装置、圧縮装置、冷凍装置および空調装置 | |
| JP5056106B2 (ja) | モータ駆動用インバータ制御装置および該装置を用いた機器 | |
| KR20200113642A (ko) | 모터 구동장치 및 이를 구비하는 홈 어플라이언스 | |
| JP2004222382A (ja) | モータの運転制御装置、及び、モータの運転制御方法 | |
| JP2013225979A (ja) | モータ駆動装置、及びそれを適用した圧縮機駆動装置、並びにそれを備えた熱交換器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070809 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071101 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071128 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111214 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111214 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121214 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131214 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |