EP3209546B1 - Système de mise a l'eau et de récuperation d'engin marin et sous-marin assisté par des protections inclinables - Google Patents
Système de mise a l'eau et de récuperation d'engin marin et sous-marin assisté par des protections inclinables Download PDFInfo
- Publication number
- EP3209546B1 EP3209546B1 EP15784397.0A EP15784397A EP3209546B1 EP 3209546 B1 EP3209546 B1 EP 3209546B1 EP 15784397 A EP15784397 A EP 15784397A EP 3209546 B1 EP3209546 B1 EP 3209546B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- marine
- ramp
- protective
- carriage
- submarine device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001681 protective effect Effects 0.000 title claims description 52
- 238000011084 recovery Methods 0.000 claims description 33
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 24
- 230000000694 effects Effects 0.000 description 5
- 230000035939 shock Effects 0.000 description 5
- 238000012550 audit Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 2
- 235000005921 Cynara humilis Nutrition 0.000 description 1
- 240000002228 Cynara humilis Species 0.000 description 1
- 241001282135 Poromitra oscitans Species 0.000 description 1
- 206010048232 Yawning Diseases 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B23/00—Equipment for handling lifeboats or the like
- B63B23/30—Devices for guiding boats to water surface
- B63B23/32—Rigid guides, e.g. having arms pivoted near waterline
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/40—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting marine vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/40—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting marine vessels
- B63B2035/405—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting marine vessels for carrying submarines
Definitions
- the present invention is in the naval field and relates to a system for launching and recovering marine or underwater craft (LARS, for "Launch And Recovery System”) capable, on the one hand to lift the from the water to a towing system onboard a carrier ship, and on the other hand down the craft of the carrier ship to the sea. It applies in particular to the launching subsea or autonomous underwater equipment, the latter then being provided with a temporary link during the launching and recovery phases.
- LATS marine or underwater craft
- This phase consists of the passage of the fully emerged state where the craft is secured to the handling means used, in the fully submerged state where the craft no longer has any link with them, and vice versa.
- the swell movements are the most dangerous for the integrity of the craft, it being shaken by the swell while it is close to the ship structure or that of the lifting and handling means, at the risk of hitting them.
- This is particularly the case for a marine or submarine gear in the launching or recovery phase when the gear is partially in the water: its movements are not yet (or no longer ) completely controlled by lifting and handling equipment.
- a known solution is to provide means of lashing on the hull of the machine, for example fixing rings, these fixing means being arranged in such a way that the machine can be lifted while keeping a horizontal position.
- the launching and the recovery can then, for example, be carried out by means of a winch mounted on a movable gantry placed at the rear of the ship, or a crane, the crane or the crane allowing to position the hoist winch above the recovery area.
- the launch and the lift are carried out vertically which limits the possibilities of collision with the ship during the descent or ascent.
- the lifting of the machine can be achieved by placing it in a nacelle type device itself having appropriate fixing points.
- This type of solution is applicable, notably independently, to gear towed by the medium but is however not easily applicable to the case of gear towed from the front, insofar as, for obvious reasons of efficiency, it is desired to perform the towing and handling of the machine from a single cable.
- Handling by means such as those described above using a single cable proves tricky because it causes the machine a passage from the vertical position to the horizontal position during launching and vice versa during recovery .
- This handling also requires additional operations whose object is, after lifting the machine and positioning above the deck of the ship, to rest the craft flat on the deck of the ship or more generally on a storage area. These operations generally require the intervention of human operators, intervention which is made more delicate and more dangerous by strong sea.
- the generally preferred solution is to use a handling cable temporarily hung above the center of gravity of the machine.
- a solution also used provides a handling based on the establishment of means having an inclined ramp on which the machine slides to reach the surface of the water or to get out and return to the ship.
- the ramp is generally configured so as to guide the machine in a rectilinear path, which prevents the machine can follow a lateral movement.
- a ramp is generally not suitable for use by heavy seas: lateral movements of the machine can then damage it.
- the previous solution is effective but can not equip all ships. Indeed, many ships can not support the mass required for the installation of equipment related to the operation of an articulated tilting ramp.
- the problem solved by the present invention is to move the marine or underwater craft a step located between the end of the ramp and the water, especially when using a small vessel, for example a length less than 50 meters and preferably less than 20 meters, unable to withstand the installation of too heavy equipment, such as an articulated tilt ramp as described in the prior art.
- the system comprises at least two so-called protective elements integral with each other.
- said or each said protection element of the system comprises a protective part and an arm connected by a complete connection and such that said or each said arm is connected by a said pivot connection to said carriage.
- each said protective portion of the system comprises at least one curved portion and is capable of limiting the movements of said marine or underwater vehicle.
- At least a portion of a said protective portion of the system is recessed to not come into contact with fragile parts of the marine or underwater vehicle.
- said pivot connection linking each protection element to the carriage is free to rotate.
- At least one said protective portion of the system comprises at least one roller mounted at one of its ends and pivotable along a second axis parallel to the surface of the water when said system is attached to said vessel.
- At least one said protective portion of the system comprises at least one roller mounted on a portion of said protective portion capable of cooperating with said sliding zone and pivoting along a second axis parallel to the surface of the water when said system is fixed ship audit.
- the system comprises a traction means capable of controlling the sliding of said marine or underwater vehicle on said ramp.
- Said carriage of said system may be in direct or indirect contact with said marine or submarine device during the recovery or launching of said marine or underwater vehicle.
- said marine or underwater vehicle of the system may be autonomous and at least one said protection element of the system comprises a hooking device for connecting said autonomous underwater vehicle at least to said protection element.
- said traction means of the system comprises a winch, a traction cable and a motor means, such that said traction cable is integral with said marine or underwater vehicle, is driven by said winch, itself integral with said carrier vessel. and such that the carriage comprises a fairlead guiding said pull cable in the axis of the ramp.
- the system comprises at least one raising element, integral with at least one said sliding zone, in which at least one said protection element is able to cooperate with at least one said elevation element for passing said marine gear or submarine from a support of at least one said protection element to a support of said ramp or said support of said ramp to said support of at least one said protection element.
- At least one said sliding zone of the system is able to force the rotation of at least one said protection element around said carriage during the sliding of said carriage on said ramp, locally raising said marine and underwater vehicle to facilitate its operation. recovery or launching.
- the system also comprises at least one raising element, integral with at least one said sliding zone, able to force the rotation of at least one said protection element around said carriage by sliding when said carriage slides on said ramp, locally raising said marine and underwater vehicle to facilitate its recovery or launching.
- the system is able to modify the attitude of said marine or submarine device during launching or recovery of said marine or underwater vehicle.
- the present invention also relates to a vessel equipped with at least one said system.
- front, rear, front and rear are defined with respect to the longitudinal axis of the ship 6 oriented from the rear to the front of the ship 6.
- the figure 1 presents a schematic perspective view of the launching and recovery device 1.
- This device is composed of two elements: the carriage 2 and the protection element 5, itself composed of two integral parts, the protective part 4 and the arm 3.
- the two protection elements 5 are installed on either side of the carriage 2 and are integral with each other. They can rotate around the carriage along the y axis shown. This axis is parallel to the water surface 25 when the device is attached to a carrier vessel as described later, to lift or deposit the marine craft or underwater 7 carried by the protective portions 4, preferably having a curved portion to prevent forward or backward movement of the marine or underwater craft 7 during the maneuver.
- the carriage 2 comprises, in a particular embodiment, a part which has the function of a fairlead 26.
- the figure 2 shows a schematic side view of an exemplary embodiment of a protective portion 4.
- the form of this embodiment is partly curved.
- One of its functions is to carry the marine or submarine machine 7 by limiting or preventing the movements of the machine 7 due to external constraints, forwards, cavally, yawning, heaving, roll and yaw.
- the rear of the protective portion 4 has a recessed portion. This configuration can be particularly useful in the case of a contact between the protective part 4 and a wing 12 of marine or underwater vehicle 7.
- the rear of the wing 22, said trailing edge, is thinner and has a lower mechanical strength than the front part 23: the contact can, in this embodiment, take place only on the surface of the strongest part mechanically of the wing 12.
- a floating protection element may for example be coupled to a first motor means to control the immersion of the floating protection element.
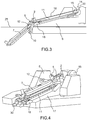
- the carriage 2 is in the figure 3 at the bottom of the ramp 11, in the low or back position, to which it is linked by a slide connection.
- the front end of the machine 7 is secured to the traction cable 16.
- This traction cable 16 is inserted inside. the fairlead 26 of the carriage 2 and remains in close contact therewith, which has the advantageous effect of maintaining the axis of the machine 7 in the axis of the ramp 11 during the progression along the latter.
- the carriage 2 is a solid element whose weight, in the absence of marine or underwater vehicle 7, tends to make it descend along the ramp 11.
- the carriage 2 thus accompanies the progression of the marine or underwater vehicle 7.
- the carriage 2 comprises a second motor means which allows it to force the descent along the ramp 11 to stay in contact with the marine or underwater vehicle 7 during its recovery or launching.
- the raising or lowering of the marine or underwater vehicle 7 is provided by a traction means 14 composed of the traction cable 16, integral with the marine or underwater vehicle 7, and a winch 15, integral.
- the marine or underwater vehicle 7 may be a machine or underwater autonomous.
- the marine or underwater vehicle 7 is provided with a temporary link during the launching and recovery phases: the connection between the traction cable 16 and the machine 7 is said to be indirect.
- this embodiment can be coupled, or replaced by an embodiment in which at least one of the protection elements 5 has a hooking device with the 7, to link the machine 7 and the one or more protective elements when they come into contact at the beginning, for example, of a recovery of the machine 7.
- the figure 3 also has an elevation element 18, located at the edge of the ramp 11. Its operation is detailed in the description of the figure 4 .
- the figure 3 illustrates an example of contacting the protection element 5 with the raising element 18 during the recovery phase or the launching.
- the figure 4 presents a schematic perspective view of the entire system when the marine or underwater vehicle 7 is fully reassembled on the ramp 11.
- the marine or submarine machine 7 has recovered using the device described in figure 1 where the two protection elements 5 are installed on either side of the carriage 2 and are integral with each other.
- This feature allows the marine or underwater vehicle 7 to cross the step between the end of the ramp 11 and the surface of the water 25 without the nose, or the front of the marine gear or under -marin 7 is in contact with the ramp 11.
- This method avoids shocks capable of damaging fragile onboard elements such as components of sensors, in particular sonar.
- the protective part 4 illustrates the sliding zone 17 situated along the ramp 11. It remains in contact with the protection element (s) 5 during the sliding of the carriage 2 along the ramp 11.
- the protective part 4 comprises a roller 10 mounted at one of its ends and pivotable along an axis parallel to the surface of the water 25, as illustrated in FIG. figure 3 .
- This roller 10 allows the protective part 4 to avoid friction with the sliding zone 17 during the passage of the marine or underwater vehicle 7 on the ramp 11.
- the protective part 4 includes one or a plurality of rollers 10 mounted on a portion of said protective portion 4 adapted to cooperate with said sliding zone 17 and / or an elevating element 18, and pivotable along a second axis parallel to the surface of the water 25 when the system is fixed to the ship 6. These rollers prevent friction between the protection elements 5 and the sliding zone 17 and / or one or more elevation elements 18. They are for example arranged under the protective part or parts 4 in the repository of the ship.
- the sliding zone 17 also makes it possible to support the raising element 18, which is integral with it, in order to move the protective element 5 by contact.
- the figure 4 further illustrates protection and sliding means 30 mounted on the ramp 11 and provided to promote the progression of the machine 7 along the ramp 11, under the action of the traction exerted by the traction cable 16 and gravity.
- protection and sliding means 30 mounted on the ramp 11 and provided to promote the progression of the machine 7 along the ramp 11, under the action of the traction exerted by the traction cable 16 and gravity.
- These means are for example rollers or rollers arranged laterally on the bottom of the ramp 11 and on which the machine 7 rolls.
- the figure 5 is a sequence of schematic profile views of the entire LARS system describing a complete phase of recovery of the marine or submarine craft 7.
- One of the main technical problems can be illustrated by the figure 5.F .
- This figure illustrates the vertical step, of height h, present between the surface of the water 25 and the end of the ramp 11 inclined.
- This vertical wall represents a source of impacts or shocks with the wall of the marine or submarine machine 7 when it is launched and recovered, especially when passing from the front of the machine marine or submarine 7 between the surface of the water 25 and the bottom of the ramp.
- the present invention has the effect of allowing the launching and recovery of the marine or underwater vehicle 7, avoiding contact between the previously described step and the front of the marine or underwater vehicle 7.
- the recovery sequence is described from the figure 5.A .
- This figure illustrates an approach phase of the marine or submarine machine 7.
- the latter is immersed and secured to the traction cable 16.
- another embodiment may include a marine or sub-marine machine.
- Marine 7 whose navigation is on the surface during this phase of recovery.
- the carriage 2 is in the retracted position, either at the lower end of the ramp 11 by the effect of gravity or by effect of the second motor means.
- the protection elements 5 are in the lower position, or pivoted downwards, so as to be immersed to receive the marine or underwater vehicle 7.
- the main axis of inertia of the protection elements is at an angle to the surface of the water between 80 ° and 90 °.
- the figure 5.B illustrates the docking phase of the marine or underwater vehicle 7.
- the traction cable 16 is cut by the winch 15.
- the marine or underwater vehicle 7 has wings 12.
- the traction of the cable drives the wings 12 in abutment of the protection elements 5.
- the figure 5.C illustrates the rising phase of the forward step of the marine or underwater vehicle 7.
- the towing cable 16 continues to be swallowed by the winch 15.
- the protection elements 5 are constrained by the wings 12 of the marine or underwater vehicle 7, by the sliding zone 17 and by the raising elements 18: the protection elements 5 then pivot around the carriage 2, their rotation is forced by the sliding zone 17 and / or an element of elevation 18. This rotation of the protection elements 5 lifts the front of the marine or underwater vehicle 7 to bring it to the level of the ramp.
- the front of the marine or underwater craft 7 then does not touch any LARS element, which helps protect potentially damaging shock sensors.
- the Figure 5.D and 5.E illustrate the continuation of the ascent of the marine or submarine machine 7 on the ramp 11.
- the traction cable 16 continues to be swallowed by the winch 15.
- the protection elements 5 continue to pivot around the carriage 2, together with the forward sliding of the carriage 2 along the ramp 11.
- the elements 5 slide, or roll in a particular embodiment, on the raising element 18, allowing the front of the marine or underwater vehicle 7 to be further elevated.
- the body of the marine or submarine machine 7, more resistant than the front, is based on means of protection and sliding 30 of the ramp, in this case rollers.
- the figure 5.F illustrates the marine or underwater vehicle 7 mounted at the end of the ramp 11.
- the protective elements 5 are no longer in their raised position.
- the front of the marine or underwater vehicle 7 then rests on the ramp 11 via its body.
- the protection elements 5 remain in contact with the wings 12 and thus limit or prevent in particular the roll of the marine or underwater vehicle 7.
- the attitude of the marine or submarine machine 7 varies, during launching or recovery, according to its initial attitude and the constraints imposed by the system.
- the standard of the maximum attitude variation of the marine or underwater vehicle 7 may be between 0 and 90 °.
- the system is capable of modifying the attitude of said marine or submarine device when launching or recovering said marine or underwater vehicle.
- the marine or underwater vehicle 7 comprises neither wing 12 nor lateral protuberance.
- the recovery and launch phases are similar to those illustrated in the figure 5 in this embodiment, the protective part or parts 4 are directly in contact with the hull of the marine or submarine machine 7.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Transportation (AREA)
- Laying Of Electric Cables Or Lines Outside (AREA)
- Electric Cable Installation (AREA)
Description
- La présente invention se situe dans le domaine naval et concerne un système de mise à l'eau et de récupération d'engin marin ou sous-marin (L.A.R.S., pour « Launch And Recovery System ») capable, d'une part de soulever l'engin depuis l'eau jusqu'à un système de remorquage embarqué à un navire porteur, et d'autre part de descendre l'engin du navire porteur jusqu'à la mer. Elle s'applique notamment à la mise à l'eau d'engins sous-marins remorqués ou autonomes, ces derniers étant alors munis d'un lien temporaire pendant les phases de mise à l'eau et de récupération.
- Les opérations de mise à l'eau et de récupération d'un engin marin ou sous-marin depuis un navire porteur, chargé par ailleurs du transport de cet engin, comporte généralement une phase critique, surtout par mer agitée. Cette phase consiste dans le passage de l'état totalement émergé où l'engin est solidaire des moyens de manutention utilisés, à l'état totalement immergé où l'engin n'a plus de lien avec ceux-ci, et inversement. En effet, c'est durant ces phases critiques que les mouvements de houle sont les plus dangereux pour l'intégrité de l'engin, celui-ci étant secoué par la houle alors qu'il se trouve à proximité soit de la structure du navire, soit de celle des moyens de levage et de manutention, au risque de les heurter. C'est en particulier le cas pour un engin marin ou sous-marin dans la phase de mise à l'eau ou de récupération, lorsque l'engin est partiellement dans l'eau : ses mouvements ne sont pas encore (ou ne sont plus) complètement maîtrisés par les moyens de levage et de manutention.
- Ainsi, en ce qui concerne les engins autonomes, non tractés par le navire, une solution connue consiste à prévoir des moyens d'arrimage sur la coque de l'engin, par exemple des anneaux de fixation, ces moyens de fixation étant agencés de telle façon que l'engin puisse être levé en gardant une position horizontale. La mise à l'eau et la récupération peut alors, par exemple, être réalisée au moyen d'un treuil monté sur un portique mobile placé à l'arrière du navire, ou encore une grue, le portique ou la grue permettant de positionner le treuil de levage au dessus de la zone de récupération. Par suite la mise à l'eau et la remontée s'effectuent à la verticale ce qui limite les possibilités de collision avec le navire pendant la descente ou la remontée. Alternativement le levage de l'engin peut être réalisé en plaçant celui-ci dans un dispositif de type nacelle comportant lui-même des points de fixation appropriés.
- Ce type de solution est applicable, notamment de manière autonome, à des engins remorqués par le milieu mais n'est cependant pas facilement applicable au cas des engins remorqués par l'avant, dans la mesure où, pour des raisons évidentes d'efficacité, on souhaite réaliser le tractage et la manutention de l'engin à partir d'un câble unique. Une manutention par des moyens tels que ceux décrits précédemment en utilisant un câble unique s'avère délicate car elle entraîne pour l'engin un passage de la position verticale à la position horizontale lors de la mise à l'eau et inversement lors de la récupération. Cette manutention nécessite en outre des opérations complémentaires qui ont pour objet, après levage de l'engin et positionnement au dessus du pont du navire, de reposer l'engin à plat sur le pont du navire ou plus généralement sur une aire de stockage. Ces opérations nécessitent généralement l'intervention d'opérateurs humains, intervention qui est rendue plus délicate et plus dangereuse par mer forte. Lors de l'utilisation d'engins remorqués par l'avant, la solution généralement préférée consiste à utiliser un câble de manutention accroché temporairement au-dessus du centre de gravité de l'engin.
- Une solution également utilisée prévoit une manutention basée sur la mise en place de moyens comportant une rampe inclinée sur laquelle glisse l'engin pour rejoindre la surface de l'eau ou pour en sortir et retourner sur le navire. La rampe est généralement configurée de façon à assurer le guidage de l'engin selon une trajectoire rectiligne, ce qui évite que l'engin puisse suivre un déplacement latéral. Cependant, une telle rampe n'est généralement pas adaptée à un usage par forte mer : des déplacements latéraux de l'engin peuvent alors l'endommager.
- L'utilisation de tels moyens permet avantageusement de réaliser la mise à la mer et le déploiement de l'engin derrière le navire en laissant filer le câble de remorquage et, inversement, de récupérer l'engin à bord du navire en enroulant le câble, sur le tambour d'un treuil par exemple. De cette manière, la mise à l'eau et la récupération de l'engin peuvent être réalisées alors que le navire est en mouvement, de sorte que l'engin, traîné par le navire se positionne naturellement dans l'axe de progression de celui-ci.
- Pour pallier ces difficultés d'entrée en contact, diverses solutions ont été développées, solutions généralement adaptées à un type d'engin donné. Ces solutions connues consistent généralement à renforcer la structure de l'engin, principalement le nez, de façon à ce que celui-ci résiste aux chocs consécutifs à l'entrée en contact avec l'extrémité de la rampe. Elle consiste également à mettre en oeuvre des moyens permettant de minimiser ces chocs, en particulier en configurant la rampe de façon à ce que son extrémité se trouve située sous la surface de l'eau de telle sorte que l'engin flottant en surface entre en contact avec la surface inclinée de la rampe et non avec son extrémité. De telles solutions s'avèrent néanmoins insuffisantes par mer forte car l'effet de tossage (ou de "slamming" selon la dénomination anglo-saxonne) dû aux vagues est alors renforcé par le mouvement du navire.
- D'autres solutions ont été développées (par exemple
EP 20110793422 US 8430049B1 ) dans lesquelles une rampe articulée inclinable est intégrée au navire. L'inclinaison de la rampe permet de contrôler la partie immergée de la rampe. Une fois la rampe immergée, une traction de l'engin permet de franchir la butée qui sépare la rampe de la surface de l'eau. De plus, par forte mer, la rampe peut être émergée. - La solution précédente est efficace mais ne peut pas équiper tous les navires. En effet, beaucoup de navires ne peuvent pas supporter la masse nécessaire à l'installation de l'équipement lié au fonctionnement d'une rampe inclinable articulée. Le problème résolu par la présente invention est de faire franchir à l'engin marin ou sous-marin une marche située entre l'extrémité de la rampe et l'eau, notamment lors de l'utilisation d'un petit navire, par exemple d'une longueur inférieure à 50 mètres et préférentiellement inférieure à 20 mètres, incapable de supporter l'installation d'un équipement trop lourd, tel qu'une rampe inclinable articulée comme décrit dans l'art antérieur.
- L'état de la technique le plus proche est représenté dans le document
US 2013/025521 A1 , qui décrit le préambule de la revendication 1. - La présente invention a pour objet un système comprenant une rampe et un dispositif de mise à l'eau et de récupération d'engin marin ou sous-marin depuis un navire porteur, ledit dispositif comportant un chariot et au moins un élément de protection, caractérisé en ce que :
- chaque dit élément de protection est lié audit chariot par une liaison pivot dont l'axe, quand ledit dispositif est fixé audit navire, est parallèle à la surface de l'eau ;
- au moins un dit élément de protection est apte à soulever ledit engin marin ou sous-marin partiellement ou totalement hors de l'eau, lors d'une récupération et à déposer ledit engin marin ou sous-marin dans l'eau ou partiellement dans l'eau lors d'une mise à l'eau, par rotation dudit ou desdits éléments de protection autour dudit chariot ;
- ledit chariot et ladite rampe sont liés par une liaison glissière ;
- ladite rampe est rendue solidaire dudit navire ;
- au moins un dit élément de protection est apte à soulever ou déposer ledit engin marin ou sous-marin par contact avec un élément choisi parmi au moins une aile dudit engin marin ou sous-marin, au moins une protubérance latérale dudit engin marin ou sous-marin et la coque dudit engin marin ou sous-marin ;
- ledit système comporte au moins une zone de glissement située le long de ladite rampe, en contact avec ladite partie protectrice et solidaire dudit navire, et en ce que
- au moins un dit élément de protection est apte à coopérer avec ladite zone de glissement pour faire transiter ledit engin marin ou sous-marin depuis un support d'au moins un dit élément de protection à un support de ladite rampe ou dudit support de ladite rampe audit support d'au moins un dit élément de protection.
- Avantageusement, le système comprend au moins deux dits éléments de protection solidaires entre eux.
- Avantageusement, ledit ou chaque dit élément de protection du système comprend une partie protectrice et un bras liés par une liaison complète et tel que ledit ou chaque dit bras est relié par une dite liaison pivot audit chariot.
- Avantageusement, chaque dite partie protectrice du système comprend au moins une partie courbe et est apte à limiter les mouvements dudit engin marin ou sous-marin.
- Avantageusement, au moins une partie d'une dite partie protectrice du système est évidée pour ne pas entrer en contact avec des parties fragiles de l'engin marin ou sous-marin.
- Avantageusement, ladite liaison pivot liant chaque élément de protection au chariot est libre en rotation.
- Avantageusement, au moins une dite partie protectrice du système comporte au moins un rouleau monté à l'une de ses extrémités et pivotant selon un second axe parallèle à la surface de l'eau quand ledit système est fixé audit navire.
- Avantageusement, au moins une dite partie protectrice du système comporte au moins un rouleau monté sur une partie de ladite partie protectrice apte à coopérer avec ladite zone de glissement et pivotant selon un second axe parallèle à la surface de l'eau quand ledit système est fixé audit navire.
- Avantageusement, le système comprend un moyen de traction apte au contrôle du glissement dudit engin marin ou sous-marin sur ladite rampe. Ledit chariot dudit système peut être en contact direct ou indirect avec ledit engin marin ou sous-marin lors de la récupération ou de la mise à l'eau dudit engin marin ou sous-marin.
- Avantageusement, ledit engin marin ou sous-marin du système peut être autonome et au moins un dit élément de protection du système comporte un dispositif d'accroche permettant de lier ledit engin sous-marin autonome au moins audit élément de protection.
- Avantageusement, ledit moyen de traction du système comporte un treuil, un câble de traction et un moyen moteur, tel que ledit câble de traction est solidaire dudit engin marin ou sous-marin, est entraîné par ledit treuil, lui-même solidaire dudit navire porteur et tel que le chariot comporte un chaumard guidant ledit câble de traction dans l'axe de la rampe.
- Avantageusement, le système comprend au moins un élément de surélévation, solidaire d'au moins une dite zone de glissement, dans lequel au moins un dit élément de protection est apte à coopérer avec au moins un dit élément de surélévation pour faire transiter ledit engin marin ou sous-marin depuis un support d'au moins un dit élément de protection à un support de ladite rampe ou dudit support de ladite rampe audit support d'au moins un dit élément de protection.
- Avantageusement, au moins une dite zone de glissement du système est apte à forcer la rotation d'au moins un dit élément de protection autour dudit chariot lors du glissement dudit chariot sur ladite rampe, surélevant localement ledit engin marin et sous-marin pour faciliter sa récupération ou sa mise à l'eau.
- Avantageusement, le système comprend également au moins un élément de surélévation, solidaire d'au moins une dite zone de glissement, apte à forcer par contact la rotation d'au moins un dit élément de protection autour dudit chariot lors du glissement dudit chariot sur ladite rampe, surélevant localement ledit engin marin et sous-marin pour faciliter sa récupération ou sa mise à l'eau.
- Avantageusement, le système est apte à modifier l'assiette dudit engin marin ou sous-marin lors de la mise à l'eau ou de la récupération dudit engin marin ou sous-marin.
- La présente invention a aussi pour objet un navire équipé d'au moins un dit système.
- L'invention sera mieux comprise et d'autres avantages, détails et caractéristiques de celle-ci apparaîtront au cours de la description explicative qui suit, faite à titre d'exemple en référence aux dessins annexés dans lesquels :
- la
figure 1 est une vue schématique en perspective du dispositif de mise à l'eau et de récupération ; - la
figure 2 est une vue schématique de profil d'un exemple de réalisation d'une partie protectrice soutenant une aile d'un engin marin ou sous-marin ; - la
figure 3 est une vue de profil de l'ensemble du système au moment de la mise à l'eau ou de la récupération ; - la
figure 4 est une vue en perspective de l'ensemble du système quand l'engin marin ou sous-marin est entièrement monté sur une rampe, et - la
figure 5 est une séquence de vues schématiques de profil de l'ensemble du système décrivant une phase complète de récupération. - La description suivante présente plusieurs exemples de réalisation du dispositif de l'invention : ces exemples ne sont pas limitatifs de la portée de l'invention. Ces exemples de réalisation présentent à la fois les caractéristiques essentielles de l'invention ainsi que des caractéristiques additionnelles liées aux modes de réalisation considérés. Par souci de clarté, les mêmes éléments porteront les mêmes repères dans les différentes figures.
- Dans la suite du texte, les termes avant, arrière, devant et derrière sont définis par rapport à l'axe longitudinal du navire 6 orienté de l'arrière vers l'avant du navire 6.
- La
figure 1 présente une vue schématique de perspective du dispositif de mise à l'eau et de récupération 1. Ce dispositif est composé de deux éléments : le chariot 2 et l'élément de protection 5, lui-même composé de deux parties solidaires, la partie protectrice 4 et le bras 3. Dans l'exemple de lafigure 1 , les deux éléments de protection 5 sont installés de part et d'autre du chariot 2 et sont solidaires entre eux. Ils peuvent pivoter autour du chariot selon l'axe y représenté. Cet axe y est parallèle à la surface de l'eau 25 quand le dispositif est fixé à un navire porteur comme décrit ultérieurement, afin de pouvoir soulever ou déposer l'engin marin ou sous-marin 7 porté par les parties protectrices 4, de préférence possédant une partie courbe pour empêcher le mouvement en avant ou en arrière de l'engin marin ou sous-marin 7 pendant la manoeuvre. Le chariot 2 comporte, dans un mode de réalisation particulier, une partie qui a la fonction d'un chaumard 26. - La
figure 2 présente une vue schématique de profil d'un exemple de réalisation d'une partie protectrice 4. La forme de cette réalisation est en partie courbe. Une de ses fonctions est de porter l'engin marin ou sous-marin 7 en limitant ou en empêchant les mouvements de l'engin 7 dus à des contraintes extérieures, vers l'avant, de cavalement, d'embardée, de pilonnement, de roulis et de lacet. Dans une réalisation particulière de l'invention, l'arrière de la partie protectrice 4 présente une partie évidée. Cette configuration peut être particulièrement utile dans le cas d'un contact entre la partie protectrice 4 et une aile 12 d'engin marin ou sous-marin 7. L'arrière de l'aile 22, dit bord de fuite, est plus fin et possède une résistance mécanique plus faible que la partie avant 23 : le contact peut, dans cette réalisation, avoir lieu uniquement sur la surface de la partie la plus résistante mécaniquement de l'aile 12. - La
figure 3 présente une vue de profil d'une réalisation de l'ensemble du système L.A.R.S. lors d'une phase de mise à l'eau ou de récupération d'un engin marin ou sous-marin 7. Dans cette réalisation, la position de l'élément de protection 5 est déterminée par trois facteurs : - la liaison pivot avec le chariot 2, décrite précédemment,
- la différence entre la force de gravité et la poussée d'Archimède subie par l'élément de protection 5 : l'élément de protection 5 est, dans cette réalisation particulière, dit de type pesant car il ne flotte pas, et
- le contact avec l'aile 12 de l'engin marin ou sous-marin 7 qui s'appuie sur l'élément de protection 5.
- Dans cette configuration, on qualifiera la liaison pivot liant un des éléments de protection 5 et le chariot 2 de libre en rotation. Bien que la rotation puisse être contrainte par un des trois facteurs précédents, cette qualification est aussi faite pour différencier ce mode de réalisation d'un mode de réalisation particulier dans lequel la position d'un élément de protection 5 peut être déterminée de manière prépondérante par un couple moteur appliqué par un premier moyen moteur, à l'élément de protection 5 par la liaison pivot liée au chariot 2. Dans une réalisation particulière de l'invention, un élément de protection flottant peut par exemple être couplé à un premier moyen moteur pour contrôler l'immersion de l'élément de protection flottant.
- Le chariot 2 se situe dans la
figure 3 en bas de la rampe 11, en position basse ou reculée, à laquelle il est lié par une liaison glissière. En phase de mise à l'eau ou de remontée de l'engin marin ou sous-marin 7, l'extrémité avant de l'engin 7 est solidaire du câble de traction 16. Ce câble de traction 16 est inséré à l'intérieur du chaumard 26 du chariot 2 et reste en contact étroit avec celui-ci, ce qui a pour effet avantageux de maintenir l'axe de l'engin 7 dans l'axe de la rampe 11 pendant la progression le long de cette dernière. - Ce maintien en contact est naturellement obtenu dans la mesure où le chariot 2 est un élément massif dont le poids, en l'absence d'engin marin ou sous-marin 7, tend à le faire descendre le long de la rampe 11. Lors d'une mise à l'eau, le chariot 2 accompagne ainsi la progression de l'engin marin ou sous-marin 7. Dans une réalisation particulière de l'invention, le chariot 2 comporte un second moyen moteur qui lui permet de forcer la descente le long de la rampe 11 pour rester en contact avec l'engin marin ou sous-marin 7 lors de sa récupération ou de sa mise à l'eau.
- La monté ou la descente de l'engin marin ou sous-marin 7 est assurée par un moyen de traction 14 composé du câble de traction 16, solidaire de l'engin marin ou sous-marin 7, et d'un treuil 15, solidaire du navire porteur 6, qui permet de tracter le câble 16 lors d'une phase de récupération, ou de relâcher le câble 16 lors d'une phase de mise à l'eau, grâce à un troisième moyen moteur 20 capable d'imposer un second couple moteur au treuil 15. Dans un mode de réalisation particulier, l'engin marin ou sous-marin 7 peut être un engin ou sous-marin autonome. Dans ce cas, l'engin marin ou sous-marin 7 est muni d'un lien temporaire pendant les phases de mise à l'eau et de récupération : la liaison entre le câble de traction 16 et l'engin 7 est dite indirecte. Lors de l'utilisation d'un engin marin ou sous-marin autonome, ce mode de réalisation peut être couplé, ou remplacé par un mode de réalisation selon lequel au moins un des éléments de protection 5 possède un dispositif d'accroche avec l'engin 7, permettant de lier l'engin 7 et le ou les éléments de protection lors de leur mise en contact au début, par exemple, d'une récupération de l'engin 7.
- La
figure 3 présente également un élément de surélévation 18, situé en bordure de la rampe 11. Son fonctionnement est détaillé dans la description de lafigure 4 . Lafigure 3 illustre un exemple de mise en contact de l'élément de protection 5 avec l'élément de surélévation 18 pendant la phase de récupération ou la mise à l'eau. - La
figure 4 présente une vue schématique en perspective de l'ensemble du système quand l'engin marin ou sous-marin 7 est entièrement remonté sur la rampe 11. Selon un mode de réalisation présenté dans cette figure, l'engin marin ou sous-marin 7 a été récupéré à l'aide du dispositif décrit dans lafigure 1 où les deux éléments de protection 5 sont installés de part et d'autre du chariot 2 et sont solidaires entre eux. Cette caractéristique permet à l'engin marin ou sous-marin 7 de franchir la marche située entre l'extrémité de la rampe 11 et la surface de l'eau 25 sans que le nez, ou l'avant de l'engin marin ou sous-marin 7 ne soit en contact avec la rampe 11. Cette méthode permet d'éviter des chocs capables d'endommager des éléments embarqués fragiles tels que des éléments constitutifs de capteurs, en particulier d'un sonar. - La
figure 4 permet d'illustrer la zone de glissement 17 située le long de la rampe 11. Elle reste en contact avec le ou les éléments de protection 5 lors du glissement du chariot 2 le long de la rampe 11. Selon un mode de réalisation considéré, la partie protectrice 4 comprend un rouleau 10 monté à l'une de ses extrémités et pivotant selon un axe parallèle à la surface de l'eau 25, tel qu'illustré dans lafigure 3 . Ce rouleau 10 permet à la partie protectrice 4 d'éviter les frottements avec la zone de glissement 17 lors du passage de l'engin marin ou sous-marin 7 sur la rampe 11. Selon un autre mode de réalisation de l'invention, la partie protectrice 4 comprend un ou plusieurs rouleaux 10 montés sur une partie de ladite partie protectrice 4 apte à coopérer avec ladite zone de glissement 17 et/ou un élément de surélévation 18, et pivotant selon un second axe parallèle à la surface de l'eau 25 quand le système est fixé au navire 6. Ces rouleaux permettent d'éviter les frottements entre les éléments de protection 5 et la zone de glissement 17 et/ou un ou des éléments de surélévation 18. Ils sont par exemple agencés sous la ou les parties protectrices 4 dans le référentiel du navire. - Selon le mode de réalisation considéré, la zone de glissement 17 permet aussi de supporter l'élément de surélévation 18, qui lui est solidaire, dans le but de mettre en mouvement l'élément de protection 5 par contact.
- La
figure 4 illustre de plus des moyens de protection et de glissement 30 montés sur la rampe 11 et prévus pour favoriser la progression de l'engin 7 le long de la rampe 11, sous l'action de la traction exercée par le câble de traction 16 et de la gravité. Ces moyens sont par exemple des rouleaux ou des galets roulants disposés latéralement sur le fond de la rampe 11 et sur lesquels roule l'engin 7. - La
figure 5 est une séquence de vues schématiques de profil de l'ensemble du système L.A.R.S. décrivant une phase complète de récupération de l'engin marin ou sous-marin 7. L'un des problèmes techniques principaux peut être illustré par lafigure 5.F . Cette figure illustre la marche verticale, de hauteur h, présente entre la surface de l'eau 25 et l'extrémité de la rampe 11 inclinée. Cette paroi verticale représente une source d'impacts ou de chocs avec la paroi de l'engin marin ou sous-marin 7 lors de sa mise à l'eau et de sa récupération, notamment lors du passage de l'avant de l'engin marin ou sous-marin 7 entre la surface de l'eau 25 et le bas de la rampe. - La présente invention a pour effet de permettre la mise à l'eau et la récupération de l'engin marin ou sous-marin 7, en évitant tout contact entre la marche précédemment décrite et l'avant de l'engin marin ou sous-marin 7. La séquence de récupération est décrite à partir de la
figure 5.A . Cette figure illustre une phase d'approche de l'engin marin ou sous-marin 7. Ce dernier est immergé et solidaire du câble de traction 16. On peut cependant noter qu'un autre mode de réalisation peut inclure un engin marin ou sous-marin 7 dont la navigation est en surface lors de cette phase de la récupération. Le chariot 2 est en position reculée, soit à l'extrémité basse de la rampe 11 par effet de la gravité ou par effet du second moyen moteur. Les éléments de protection 5 sont en position basse, soit pivotés vers le bas, de manière à être immergés pour réceptionner l'engin marin ou sous-marin 7. Dans l'exemple de lafigure 5.A , l'axe principal d'inertie des éléments de protection décrit un angle avec la surface de l'eau 25 compris entre 80° et 90°. - La
figure 5.B illustre la phase d'accostage de l'engin marin ou sous-marin 7. Le câble de traction 16 est ravalé par le treuil 15. Dans cet exemple de réalisation, l'engin marin ou sous-marin 7 possède des ailes 12. La traction du câble entraîne les ailes 12 en butée des éléments de protection 5. - La
figure 5.C illustre la phase de montée de la marche de l'avant de l'engin marin ou sous-marin 7. Le câble de traction 16 continue d'être ravalé par le treuil 15. Les éléments de protection 5 sont contraints par les ailes 12 de l'engin marin ou sous-marin 7, par la zone glissement 17 et par les éléments de surélévation 18 : les éléments de protection 5 pivotent alors autour du chariot 2, leur rotation est forcée par la zone de glissement 17et/ou un élément de surélévation 18. Cette rotation des éléments de protection 5 soulève l'avant de l'engin marin ou sous-marin 7 pour l'amener au niveau de la rampe. L'avant de l'engin marin ou sous-marin 7 ne touche alors aucun élément du L.A.R.S., ce qui permet de protéger les capteurs de chocs potentiellement destructeurs. - La
figure 5.D et 5.E illustrent la suite de la remontée de l'engin marin ou sous-marin 7 sur la rampe 11. Dans lafigure 5.D , le câble de traction 16 continue d'être ravalé par le treuil 15. Les éléments de protection 5 continuent de pivoter autour du chariot 2, de paire avec le glissement vers l'avant du chariot 2 le long de la rampe 11. Les éléments de protection 5 glissent, ou roulent selon une réalisation particulière, sur l'élément de surélévation 18, permettant à l'avant de l'engin marin ou sous-marin 7 d'être encore surélevé. Le corps de l'engin marin ou sous-marin 7, plus résistant que l'avant, s'appuie sur des moyens de protection et de glissement 30 de la rampe, en l'occurrence des rouleaux. - Dans la
figure 5.E , le câble de traction 16 continue d'être ravalé par le treuil 15. Lors de la traction, l'engin marin ou sous-marin prend appui sur les moyens de protection et de glissement 30 de la rampe 11 jusqu'à se reposer sur la rampe 11. Le contact entre les éléments de protection 5 et les éléments de surélévation 18 cesse et les éléments de protection 5 glissent ou roulent sur les zones de glissement 17. - La
figure 5.F illustre l'engin marin ou sous-marin 7 monté au bout de la rampe 11. Les éléments de protection 5 ne sont plus dans leur position surélevée. L'avant de l'engin marin ou sous-marin 7 repose alors sur la rampe 11 par l'intermédiaire de son corps. Les éléments de protection 5 restent en contact avec les ailes 12 et ainsi limitent ou empêchent notamment le roulis de l'engin marin ou sous-marin 7. - L'assiette de l'engin marin ou sous-marin 7 varie, lors d'une mise à l'eau ou d'une récupération, en fonction de son assiette initiale et des contraintes imposées par le système. Dans des modes de réalisation de l'invention, la norme de la variation d'assiette maximale de l'engin marin ou sous-marin 7 peut être comprise entre 0 et 90°. Le système est apte à modifier l'assiette dudit engin marin ou sous-marin lors de la mise à l'eau ou de la récupération dudit engin marin ou sous-marin.
- Dans une réalisation particulière de l'invention, l'engin marin ou sous-marin 7 ne comprend ni aile 12 ni protubérance latérale. Les phases de récupération et la mise à l'eau sont analogues à celles illustrées dans la
figure 5 : dans cette réalisation, la ou les parties protectrices 4 sont directement en contact avec la coque de l'engin marin ou sous-marin 7.
Claims (16)
- Système comprenant une rampe (11) et un dispositif de mise à l'eau et de récupération (1) d'engin marin ou sous-marin (7) depuis un navire (6) porteur, ledit dispositif (1) comportant un chariot (2) et au moins un élément de protection (5), dans lequel• ledit chariot (2) et ladite rampe (11) sont liés par une liaison glissière ;• ladite rampe (11) est apte à être rendue solidaire dudit navire (6) ;• au moins un dit élément de protection (5) est apte à soulever ou déposer ledit engin marin ou sous-marin (7) par contact avec un élément choisi parmi au moins une aile (12) dudit engin marin ou sous-marin (7), au moins une protubérance latérale dudit engin marin ou sous-marin (7) et la coque dudit engin marin ou sous-marin (7) ;• ledit système comporte au moins une zone de glissement (17) située le long de ladite rampe (11), en contact avec une partie protectrice (4) et solidaire dudit navire (6),et caractérisé en ce que• chaque dit élément de protection (5) est lié audit chariot (2) par une liaison pivot dont l'axe, quand ledit dispositif est fixé audit navire (6), est apte à être parallèle à la surface de l'eau (25) ;• au moins un dit élément de protection (5) est apte à soulever ledit engin marin ou sous-marin (7) partiellement ou totalement hors de l'eau, lors d'une récupération et à déposer ledit engin marin ou sous-marin (7) partiellement ou totalement hors de l'eau, lors d'une récupération et à déposer ledit engin marin ou sous-marin (7) dans l'eau ou partiellement dans l'eau lors d'une mise à l'eau, par rotation dudit ou desdits éléments de protection (5) autour dudit chariot (2) ;• au moins un dit élément de protection (5) est apte à coopérer avec ladite zone de glissement (17) pour faire transiter ledit engin marin ou sous-marin (7) depuis un support d'au moins un dit élément de protection (5) à un support de ladite rampe (11) ou dudit support de ladite rampe (11) audit support d'au moins un dit élément de protection (5).
- Système selon la revendication précédente comprenant au moins deux dits éléments de protection (5) solidaires entre eux.
- Système selon l'une des revendications précédentes, dans lequel ledit ou chaque dit élément de protection (5) comprend ladite partie protectrice (4) et un bras (3) liés par une liaison complète et tel que ledit ou chaque dit bras (3) est relié par une dite liaison pivot audit chariot (2).
- Système selon l'une des revendications précédentes dont chaque dite partie protectrice (4) comprend au moins une partie courbe et est apte à limiter les mouvements dudit engin marin ou sous-marin (7).
- Système selon l'une des revendications précédentes dont au moins une partie d'une dite partie protectrice (4) est évidée pour ne pas entrer en contact avec des parties fragiles de l'engin marin ou sous-marin (7).
- Système selon l'une des revendications précédentes dont ladite liaison pivot est libre en rotation.
- Système selon l'une des revendications précédentes dans lequel au moins une dite partie protectrice (4) comporte au moins un rouleau (10) monté à l'une de ses extrémités et pivotant selon un second axe parallèle à la surface de l'eau (25) quand ledit système est fixé audit navire (6).
- Système selon l'une des revendications précédentes dans lequel au moins une dite partie protectrice (4) comporte au moins un rouleau (10) monté sur une partie de ladite partie protectrice (4) apte à coopérer avec ladite zone de glissement (17) et pivotant selon un second axe parallèle à la surface de l'eau (25) quand ledit système est fixé audit navire (6).
- Système selon l'une des revendications précédentes comprenant un moyen de traction (14) apte au contrôle du glissement dudit engin marin ou sous-marin (7) sur ladite rampe (11).
- Système selon l'une des revendications précédentes dans lequel au moins un dit élément de protection (5) comporte un dispositif d'accroche permettant de lier ledit engin marin ou sous-marin au moins audit élément de protection (5).
- Système selon l'une des revendications 9 à 10 dans lequel ledit moyen de traction (14) comporte un treuil (15), un câble de traction (16) et un moyen moteur (20), tel que ledit câble de traction (16) est apte à être solidaire dudit engin marin ou sous-marin (7), et à être entraîné par ledit treuil (15), lui-même solidaire dudit navire porteur (6) et tel que le chariot (2) comporte un chaumard (26) apte à guider ledit câble de traction (16) dans l'axe de la rampe (11).
- Système selon l'une des revendications précédentes dont au moins une dite zone de glissement (17) est apte à forcer la rotation d'au moins un dit élément de protection (5) autour dudit chariot (2) lors du glissement dudit chariot (2) sur ladite rampe (11), surélevant localement ledit engin marin et sous-marin (7) pour faciliter sa récupération ou sa mise à l'eau.
- Système selon l'une des revendications précédentes comprenant au moins un élément de surélévation (18), solidaire d'au moins une dite zone de glissement (17), dans lequel au moins un dit élément de protection (5) est apte à coopérer avec au moins un dit élément de surélévation (18) pour faire transiter ledit engin marin ou sous-marin (7) depuis un support d'au moins un dit élément de protection (5) à un support de ladite rampe (11) ou dudit support de ladite rampe (11) audit support d'au moins un dit élément de protection (5).
- Système selon l'une des revendications précédentes dans lequel au moins un dit élément de surélévation (18) est apte à forcer par contact la rotation d'au moins un dit élément de protection (5) autour dudit chariot (2) lors du glissement dudit chariot (2) sur ladite rampe (11), surélevant localement ledit engin marin et sous-marin (7) pour faciliter sa récupération ou sa mise à l'eau.
- Système selon l'une des revendications précédentes apte à modifier l'assiette dudit engin marin ou sous-marin (7) lors de la mise à l'eau ou de la récupération dudit engin marin ou sous-marin (7).
- Navire (6) équipé d'au moins un système selon l'une des revendications précédentes.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1402392A FR3027585B1 (fr) | 2014-10-24 | 2014-10-24 | Systeme de mise a l'eau et de recuperation d'engin marin et sous-marin assiste par des protections inclinables |
| PCT/EP2015/074624 WO2016062870A1 (fr) | 2014-10-24 | 2015-10-23 | Systeme de mise a l'eau et de recuperation d'engin marin et sous-marin assiste par des protections inclinables |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3209546A1 EP3209546A1 (fr) | 2017-08-30 |
| EP3209546B1 true EP3209546B1 (fr) | 2019-07-31 |
Family
ID=52450175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15784397.0A Active EP3209546B1 (fr) | 2014-10-24 | 2015-10-23 | Système de mise a l'eau et de récuperation d'engin marin et sous-marin assisté par des protections inclinables |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10232915B2 (fr) |
| EP (1) | EP3209546B1 (fr) |
| CA (1) | CA2965577C (fr) |
| DK (1) | DK3209546T3 (fr) |
| FR (1) | FR3027585B1 (fr) |
| SG (1) | SG11201703287SA (fr) |
| WO (1) | WO2016062870A1 (fr) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109533237B (zh) * | 2017-09-22 | 2020-06-19 | 中国科学院沈阳自动化研究所 | 一种自主水下机器人布放回收单点起吊止荡保护装置 |
| DE102017220932A1 (de) * | 2017-11-23 | 2019-05-23 | Thyssenkrupp Ag | Vorrichtung und Verfahren zum Aufnehmen eines Wasserfahrzeugs mittels einer Kette |
| NO345094B1 (en) | 2018-09-21 | 2020-09-28 | Usea As | A marine structure comprising a launch and recovery system |
| FR3087544B1 (fr) * | 2018-10-22 | 2020-09-18 | Thales Sa | Systeme sonar |
| FR3131264A1 (fr) | 2021-12-23 | 2023-06-30 | Thales | Systeme pour la manoeuvre d un engin marin |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2568330A (en) * | 1945-10-19 | 1951-09-18 | Thomas J Flippin | Extensible ramp for ships |
| US3596623A (en) * | 1967-05-31 | 1971-08-03 | Litton Systems Inc | Double-hinged flotation ramp |
| US3508510A (en) * | 1968-08-21 | 1970-04-28 | Litton Systems Inc | Lighter hydrolift device |
| DE4140201C2 (de) * | 1991-12-03 | 1996-04-04 | Fr Luerssen Werft Gmbh & Co | Vorrichtung für das Ausbringen und Einholen von Schleppkörpern |
| US5253605A (en) * | 1992-12-21 | 1993-10-19 | Applied Remote Technology, Inc. | Method and apparatus for deploying and recovering water borne vehicles |
| US6843198B1 (en) * | 2002-07-31 | 2005-01-18 | Columbia Research Corporation | Transport, launch and recovery craft |
| US6779475B1 (en) * | 2003-09-15 | 2004-08-24 | The United States Of America As Represented By The Secretary Of The Navy | Launch and recovery system for unmanned underwater vehicles |
| US7156036B2 (en) * | 2005-05-13 | 2007-01-02 | Seiple Ronald L | Launch and recovery system |
| US7581507B2 (en) * | 2007-02-26 | 2009-09-01 | Physical Sciences, Inc. | Launch and recovery devices for water vehicles and methods of use |
| US8430049B1 (en) | 2009-07-13 | 2013-04-30 | Vehicle Control Technologies, Inc. | Launch and recovery systems and methods |
| US8967067B2 (en) * | 2010-12-07 | 2015-03-03 | Thales | System for launching and recovering underwater vehicles, notably towed underwater vehicles |
| FR2968268B1 (fr) * | 2010-12-07 | 2013-08-30 | Thales Sa | Systeme de mise a l'eau et de recuperation d'engins sous-marins, notamment d'engins sous-marins tractes |
| SE535880C2 (sv) * | 2011-03-04 | 2013-01-29 | Marine Performance Scandinavia Ab | Lyftanordning för hantering av flytetyg vid en båt |
| FR2978422B1 (fr) | 2011-07-26 | 2014-12-12 | Eca Robotics | Engin marin ou sous-marin et procede d'arrimage associe |
| CN203864936U (zh) * | 2014-03-20 | 2014-10-08 | 中国舰船研究设计中心 | 一种自动挂钩尾滑道式收艇装置 |
-
2014
- 2014-10-24 FR FR1402392A patent/FR3027585B1/fr not_active Expired - Fee Related
-
2015
- 2015-10-23 US US15/520,395 patent/US10232915B2/en active Active
- 2015-10-23 SG SG11201703287SA patent/SG11201703287SA/en unknown
- 2015-10-23 EP EP15784397.0A patent/EP3209546B1/fr active Active
- 2015-10-23 CA CA2965577A patent/CA2965577C/fr active Active
- 2015-10-23 DK DK15784397T patent/DK3209546T3/da active
- 2015-10-23 WO PCT/EP2015/074624 patent/WO2016062870A1/fr active Application Filing
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2965577C (fr) | 2022-12-06 |
| FR3027585A1 (fr) | 2016-04-29 |
| US10232915B2 (en) | 2019-03-19 |
| DK3209546T3 (da) | 2019-11-04 |
| CA2965577A1 (fr) | 2016-04-28 |
| FR3027585B1 (fr) | 2017-09-01 |
| WO2016062870A1 (fr) | 2016-04-28 |
| SG11201703287SA (en) | 2017-05-30 |
| EP3209546A1 (fr) | 2017-08-30 |
| US20170320547A1 (en) | 2017-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2648970B1 (fr) | Système de mise à l'eau et de récupération d'engins sous-marins, notamment d'engins sous-marins tractés | |
| EP3209546B1 (fr) | Système de mise a l'eau et de récuperation d'engin marin et sous-marin assisté par des protections inclinables | |
| EP2043911B1 (fr) | Installation et procede de recuperation d'un engin sous-marin ou marin | |
| EP2855252B1 (fr) | Systeme de mise a l'eau et de recuperation d'engins sous-marins, notamment d'engins sous-marins tractes | |
| EP2043913B1 (fr) | Appareil de recuperation d'un engin sous-marin ou marin | |
| EP2551185B1 (fr) | Engin marin ou sous-marin et procédé d'arrimage associé | |
| CA2960706C (fr) | Engin marin ou sous-marin et procede d'arrimage associe | |
| EP2480449B1 (fr) | Système d'embarquement/débarquement d'un engin dans et à partir d'un navire porteur, et navire porteur correspondant | |
| CA3132142A1 (fr) | Systeme de recuperation d'un engin marin de surface depuis un navire porteur | |
| FR3062844A1 (fr) | Systeme de mise a l'eau et de recuperation d'un engin propulse depuis le pont d'un navire porteur | |
| FR2994560A1 (fr) | Dispositif permettant de remorquer un engin sous-marin autonome | |
| EP3976461B1 (fr) | Dispositif sous-marin et systeme sous-marin | |
| CA2124103C (fr) | Procede et dispositif de levage de manutention de charge en mer | |
| EP2621796B1 (fr) | Systeme comprenant un engin sous-marin et une base situee en surface. | |
| EP2420440A1 (fr) | Dispositif pour la récupération d'un engin marin ou sous-marin | |
| EP3976460B1 (fr) | Dispositif sonar, systeme sonar | |
| EP3871000B1 (fr) | Système sonar | |
| WO2014108631A1 (fr) | Barge flottante submersible | |
| WO2023117564A1 (fr) | Systeme pour la manœuvre d'un engin marin | |
| EP4368490A1 (fr) | Interface flottante molle pour faciliter la mise à l'eau et la récupération d'un objet flottant ou submergé | |
| WO2023175264A1 (fr) | Véhicule tracté sous-marin et système de récupération d'un tel véhicule sous-marin |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170515 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20181203 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAL | Information related to payment of fee for publishing/printing deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20190418 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1160602 Country of ref document: AT Kind code of ref document: T Effective date: 20190815 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602015034875 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20191101 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20190731 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1160602 Country of ref document: AT Kind code of ref document: T Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191202 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191031 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191101 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200224 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602015034875 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG2D | Information on lapse in contracting state deleted |
Ref country code: IS |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191031 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191023 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191030 |
|
| 26N | No opposition filed |
Effective date: 20200603 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20151023 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230606 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NO Payment date: 20231010 Year of fee payment: 9 Ref country code: DK Payment date: 20231016 Year of fee payment: 9 Ref country code: DE Payment date: 20230919 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240919 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20240917 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240923 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240926 Year of fee payment: 10 |