EP3209546B1 - System zum aussetzen und bergen von see- und unterseevorrichtungen mit unterstützung durch kippbare schutzkomponenten - Google Patents
System zum aussetzen und bergen von see- und unterseevorrichtungen mit unterstützung durch kippbare schutzkomponenten Download PDFInfo
- Publication number
- EP3209546B1 EP3209546B1 EP15784397.0A EP15784397A EP3209546B1 EP 3209546 B1 EP3209546 B1 EP 3209546B1 EP 15784397 A EP15784397 A EP 15784397A EP 3209546 B1 EP3209546 B1 EP 3209546B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- marine
- ramp
- protective
- carriage
- submarine device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001681 protective effect Effects 0.000 title claims description 52
- 238000011084 recovery Methods 0.000 claims description 33
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 24
- 230000000694 effects Effects 0.000 description 5
- 230000035939 shock Effects 0.000 description 5
- 238000012550 audit Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 2
- 235000005921 Cynara humilis Nutrition 0.000 description 1
- 240000002228 Cynara humilis Species 0.000 description 1
- 241001282135 Poromitra oscitans Species 0.000 description 1
- 206010048232 Yawning Diseases 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B23/00—Equipment for handling lifeboats or the like
- B63B23/30—Devices for guiding boats to water surface
- B63B23/32—Rigid guides, e.g. having arms pivoted near waterline
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/40—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting marine vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/40—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting marine vessels
- B63B2035/405—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for for transporting marine vessels for carrying submarines
Definitions
- the present invention is in the naval field and relates to a system for launching and recovering marine or underwater craft (LARS, for "Launch And Recovery System”) capable, on the one hand to lift the from the water to a towing system onboard a carrier ship, and on the other hand down the craft of the carrier ship to the sea. It applies in particular to the launching subsea or autonomous underwater equipment, the latter then being provided with a temporary link during the launching and recovery phases.
- LATS marine or underwater craft
- This phase consists of the passage of the fully emerged state where the craft is secured to the handling means used, in the fully submerged state where the craft no longer has any link with them, and vice versa.
- the swell movements are the most dangerous for the integrity of the craft, it being shaken by the swell while it is close to the ship structure or that of the lifting and handling means, at the risk of hitting them.
- This is particularly the case for a marine or submarine gear in the launching or recovery phase when the gear is partially in the water: its movements are not yet (or no longer ) completely controlled by lifting and handling equipment.
- a known solution is to provide means of lashing on the hull of the machine, for example fixing rings, these fixing means being arranged in such a way that the machine can be lifted while keeping a horizontal position.
- the launching and the recovery can then, for example, be carried out by means of a winch mounted on a movable gantry placed at the rear of the ship, or a crane, the crane or the crane allowing to position the hoist winch above the recovery area.
- the launch and the lift are carried out vertically which limits the possibilities of collision with the ship during the descent or ascent.
- the lifting of the machine can be achieved by placing it in a nacelle type device itself having appropriate fixing points.
- This type of solution is applicable, notably independently, to gear towed by the medium but is however not easily applicable to the case of gear towed from the front, insofar as, for obvious reasons of efficiency, it is desired to perform the towing and handling of the machine from a single cable.
- Handling by means such as those described above using a single cable proves tricky because it causes the machine a passage from the vertical position to the horizontal position during launching and vice versa during recovery .
- This handling also requires additional operations whose object is, after lifting the machine and positioning above the deck of the ship, to rest the craft flat on the deck of the ship or more generally on a storage area. These operations generally require the intervention of human operators, intervention which is made more delicate and more dangerous by strong sea.
- the generally preferred solution is to use a handling cable temporarily hung above the center of gravity of the machine.
- a solution also used provides a handling based on the establishment of means having an inclined ramp on which the machine slides to reach the surface of the water or to get out and return to the ship.
- the ramp is generally configured so as to guide the machine in a rectilinear path, which prevents the machine can follow a lateral movement.
- a ramp is generally not suitable for use by heavy seas: lateral movements of the machine can then damage it.
- the previous solution is effective but can not equip all ships. Indeed, many ships can not support the mass required for the installation of equipment related to the operation of an articulated tilting ramp.
- the problem solved by the present invention is to move the marine or underwater craft a step located between the end of the ramp and the water, especially when using a small vessel, for example a length less than 50 meters and preferably less than 20 meters, unable to withstand the installation of too heavy equipment, such as an articulated tilt ramp as described in the prior art.
- the system comprises at least two so-called protective elements integral with each other.
- said or each said protection element of the system comprises a protective part and an arm connected by a complete connection and such that said or each said arm is connected by a said pivot connection to said carriage.
- each said protective portion of the system comprises at least one curved portion and is capable of limiting the movements of said marine or underwater vehicle.
- At least a portion of a said protective portion of the system is recessed to not come into contact with fragile parts of the marine or underwater vehicle.
- said pivot connection linking each protection element to the carriage is free to rotate.
- At least one said protective portion of the system comprises at least one roller mounted at one of its ends and pivotable along a second axis parallel to the surface of the water when said system is attached to said vessel.
- At least one said protective portion of the system comprises at least one roller mounted on a portion of said protective portion capable of cooperating with said sliding zone and pivoting along a second axis parallel to the surface of the water when said system is fixed ship audit.
- the system comprises a traction means capable of controlling the sliding of said marine or underwater vehicle on said ramp.
- Said carriage of said system may be in direct or indirect contact with said marine or submarine device during the recovery or launching of said marine or underwater vehicle.
- said marine or underwater vehicle of the system may be autonomous and at least one said protection element of the system comprises a hooking device for connecting said autonomous underwater vehicle at least to said protection element.
- said traction means of the system comprises a winch, a traction cable and a motor means, such that said traction cable is integral with said marine or underwater vehicle, is driven by said winch, itself integral with said carrier vessel. and such that the carriage comprises a fairlead guiding said pull cable in the axis of the ramp.
- the system comprises at least one raising element, integral with at least one said sliding zone, in which at least one said protection element is able to cooperate with at least one said elevation element for passing said marine gear or submarine from a support of at least one said protection element to a support of said ramp or said support of said ramp to said support of at least one said protection element.
- At least one said sliding zone of the system is able to force the rotation of at least one said protection element around said carriage during the sliding of said carriage on said ramp, locally raising said marine and underwater vehicle to facilitate its operation. recovery or launching.
- the system also comprises at least one raising element, integral with at least one said sliding zone, able to force the rotation of at least one said protection element around said carriage by sliding when said carriage slides on said ramp, locally raising said marine and underwater vehicle to facilitate its recovery or launching.
- the system is able to modify the attitude of said marine or submarine device during launching or recovery of said marine or underwater vehicle.
- the present invention also relates to a vessel equipped with at least one said system.
- front, rear, front and rear are defined with respect to the longitudinal axis of the ship 6 oriented from the rear to the front of the ship 6.
- the figure 1 presents a schematic perspective view of the launching and recovery device 1.
- This device is composed of two elements: the carriage 2 and the protection element 5, itself composed of two integral parts, the protective part 4 and the arm 3.
- the two protection elements 5 are installed on either side of the carriage 2 and are integral with each other. They can rotate around the carriage along the y axis shown. This axis is parallel to the water surface 25 when the device is attached to a carrier vessel as described later, to lift or deposit the marine craft or underwater 7 carried by the protective portions 4, preferably having a curved portion to prevent forward or backward movement of the marine or underwater craft 7 during the maneuver.
- the carriage 2 comprises, in a particular embodiment, a part which has the function of a fairlead 26.
- the figure 2 shows a schematic side view of an exemplary embodiment of a protective portion 4.
- the form of this embodiment is partly curved.
- One of its functions is to carry the marine or submarine machine 7 by limiting or preventing the movements of the machine 7 due to external constraints, forwards, cavally, yawning, heaving, roll and yaw.
- the rear of the protective portion 4 has a recessed portion. This configuration can be particularly useful in the case of a contact between the protective part 4 and a wing 12 of marine or underwater vehicle 7.
- the rear of the wing 22, said trailing edge, is thinner and has a lower mechanical strength than the front part 23: the contact can, in this embodiment, take place only on the surface of the strongest part mechanically of the wing 12.
- a floating protection element may for example be coupled to a first motor means to control the immersion of the floating protection element.
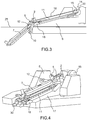
- the carriage 2 is in the figure 3 at the bottom of the ramp 11, in the low or back position, to which it is linked by a slide connection.
- the front end of the machine 7 is secured to the traction cable 16.
- This traction cable 16 is inserted inside. the fairlead 26 of the carriage 2 and remains in close contact therewith, which has the advantageous effect of maintaining the axis of the machine 7 in the axis of the ramp 11 during the progression along the latter.
- the carriage 2 is a solid element whose weight, in the absence of marine or underwater vehicle 7, tends to make it descend along the ramp 11.
- the carriage 2 thus accompanies the progression of the marine or underwater vehicle 7.
- the carriage 2 comprises a second motor means which allows it to force the descent along the ramp 11 to stay in contact with the marine or underwater vehicle 7 during its recovery or launching.
- the raising or lowering of the marine or underwater vehicle 7 is provided by a traction means 14 composed of the traction cable 16, integral with the marine or underwater vehicle 7, and a winch 15, integral.
- the marine or underwater vehicle 7 may be a machine or underwater autonomous.
- the marine or underwater vehicle 7 is provided with a temporary link during the launching and recovery phases: the connection between the traction cable 16 and the machine 7 is said to be indirect.
- this embodiment can be coupled, or replaced by an embodiment in which at least one of the protection elements 5 has a hooking device with the 7, to link the machine 7 and the one or more protective elements when they come into contact at the beginning, for example, of a recovery of the machine 7.
- the figure 3 also has an elevation element 18, located at the edge of the ramp 11. Its operation is detailed in the description of the figure 4 .
- the figure 3 illustrates an example of contacting the protection element 5 with the raising element 18 during the recovery phase or the launching.
- the figure 4 presents a schematic perspective view of the entire system when the marine or underwater vehicle 7 is fully reassembled on the ramp 11.
- the marine or submarine machine 7 has recovered using the device described in figure 1 where the two protection elements 5 are installed on either side of the carriage 2 and are integral with each other.
- This feature allows the marine or underwater vehicle 7 to cross the step between the end of the ramp 11 and the surface of the water 25 without the nose, or the front of the marine gear or under -marin 7 is in contact with the ramp 11.
- This method avoids shocks capable of damaging fragile onboard elements such as components of sensors, in particular sonar.
- the protective part 4 illustrates the sliding zone 17 situated along the ramp 11. It remains in contact with the protection element (s) 5 during the sliding of the carriage 2 along the ramp 11.
- the protective part 4 comprises a roller 10 mounted at one of its ends and pivotable along an axis parallel to the surface of the water 25, as illustrated in FIG. figure 3 .
- This roller 10 allows the protective part 4 to avoid friction with the sliding zone 17 during the passage of the marine or underwater vehicle 7 on the ramp 11.
- the protective part 4 includes one or a plurality of rollers 10 mounted on a portion of said protective portion 4 adapted to cooperate with said sliding zone 17 and / or an elevating element 18, and pivotable along a second axis parallel to the surface of the water 25 when the system is fixed to the ship 6. These rollers prevent friction between the protection elements 5 and the sliding zone 17 and / or one or more elevation elements 18. They are for example arranged under the protective part or parts 4 in the repository of the ship.
- the sliding zone 17 also makes it possible to support the raising element 18, which is integral with it, in order to move the protective element 5 by contact.
- the figure 4 further illustrates protection and sliding means 30 mounted on the ramp 11 and provided to promote the progression of the machine 7 along the ramp 11, under the action of the traction exerted by the traction cable 16 and gravity.
- protection and sliding means 30 mounted on the ramp 11 and provided to promote the progression of the machine 7 along the ramp 11, under the action of the traction exerted by the traction cable 16 and gravity.
- These means are for example rollers or rollers arranged laterally on the bottom of the ramp 11 and on which the machine 7 rolls.
- the figure 5 is a sequence of schematic profile views of the entire LARS system describing a complete phase of recovery of the marine or submarine craft 7.
- One of the main technical problems can be illustrated by the figure 5.F .
- This figure illustrates the vertical step, of height h, present between the surface of the water 25 and the end of the ramp 11 inclined.
- This vertical wall represents a source of impacts or shocks with the wall of the marine or submarine machine 7 when it is launched and recovered, especially when passing from the front of the machine marine or submarine 7 between the surface of the water 25 and the bottom of the ramp.
- the present invention has the effect of allowing the launching and recovery of the marine or underwater vehicle 7, avoiding contact between the previously described step and the front of the marine or underwater vehicle 7.
- the recovery sequence is described from the figure 5.A .
- This figure illustrates an approach phase of the marine or submarine machine 7.
- the latter is immersed and secured to the traction cable 16.
- another embodiment may include a marine or sub-marine machine.
- Marine 7 whose navigation is on the surface during this phase of recovery.
- the carriage 2 is in the retracted position, either at the lower end of the ramp 11 by the effect of gravity or by effect of the second motor means.
- the protection elements 5 are in the lower position, or pivoted downwards, so as to be immersed to receive the marine or underwater vehicle 7.
- the main axis of inertia of the protection elements is at an angle to the surface of the water between 80 ° and 90 °.
- the figure 5.B illustrates the docking phase of the marine or underwater vehicle 7.
- the traction cable 16 is cut by the winch 15.
- the marine or underwater vehicle 7 has wings 12.
- the traction of the cable drives the wings 12 in abutment of the protection elements 5.
- the figure 5.C illustrates the rising phase of the forward step of the marine or underwater vehicle 7.
- the towing cable 16 continues to be swallowed by the winch 15.
- the protection elements 5 are constrained by the wings 12 of the marine or underwater vehicle 7, by the sliding zone 17 and by the raising elements 18: the protection elements 5 then pivot around the carriage 2, their rotation is forced by the sliding zone 17 and / or an element of elevation 18. This rotation of the protection elements 5 lifts the front of the marine or underwater vehicle 7 to bring it to the level of the ramp.
- the front of the marine or underwater craft 7 then does not touch any LARS element, which helps protect potentially damaging shock sensors.
- the Figure 5.D and 5.E illustrate the continuation of the ascent of the marine or submarine machine 7 on the ramp 11.
- the traction cable 16 continues to be swallowed by the winch 15.
- the protection elements 5 continue to pivot around the carriage 2, together with the forward sliding of the carriage 2 along the ramp 11.
- the elements 5 slide, or roll in a particular embodiment, on the raising element 18, allowing the front of the marine or underwater vehicle 7 to be further elevated.
- the body of the marine or submarine machine 7, more resistant than the front, is based on means of protection and sliding 30 of the ramp, in this case rollers.
- the figure 5.F illustrates the marine or underwater vehicle 7 mounted at the end of the ramp 11.
- the protective elements 5 are no longer in their raised position.
- the front of the marine or underwater vehicle 7 then rests on the ramp 11 via its body.
- the protection elements 5 remain in contact with the wings 12 and thus limit or prevent in particular the roll of the marine or underwater vehicle 7.
- the attitude of the marine or submarine machine 7 varies, during launching or recovery, according to its initial attitude and the constraints imposed by the system.
- the standard of the maximum attitude variation of the marine or underwater vehicle 7 may be between 0 and 90 °.
- the system is capable of modifying the attitude of said marine or submarine device when launching or recovering said marine or underwater vehicle.
- the marine or underwater vehicle 7 comprises neither wing 12 nor lateral protuberance.
- the recovery and launch phases are similar to those illustrated in the figure 5 in this embodiment, the protective part or parts 4 are directly in contact with the hull of the marine or submarine machine 7.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Transportation (AREA)
- Laying Of Electric Cables Or Lines Outside (AREA)
- Electric Cable Installation (AREA)
Claims (16)
- System, das eine Rampe (11) und eine Vorrichtung zum Aussetzen und Bergen (1) eines See- oder Unterseegeräts (7) von einem Trägerschiff (6) umfasst, wobei die Vorrichtung (1) einen Schlitten (2) und wenigstens ein Schutzelement (5) umfasst, wobei:• der Schlitten (2) und die Rampe (11) durch eine Gleitverbindung miteinander verbunden sind;• die Rampe (11) mit dem Schiff (6) fest verbunden werden kann;• wenigstens ein Schutzelement (5) das See- oder Unterseegerät (7) durch Kontakt mit einem Element heben oder senken kann, ausgewählt aus wenigstens einem Flügel (12) des See- oder Unterseegeräts (7), wenigstens einem lateralen Vorsprung des See- oder Unterseegeräts (7) und dem Rumpf des See- oder Unterseegeräts (7);• wobei das System wenigstens eine Gleitzone (17) umfasst, die entlang der Rampe (11) in Kontakt mit einem Schutzteil (4) und mit dem Schiff (6) fest verbunden positioniert ist, und dadurch gekennzeichnet, dass• jedes Schutzelement (5) mit dem Schlitten (2) durch eine Schwenkverbindung verbunden ist, deren Achse, wenn die Vorrichtung an dem Schiff (6) befestigt ist, parallel zur Wasseroberfläche (25) sein kann;• wenigstens ein Schutzelement (5) das See- oder Unterseegerät (7) bei einer Bergung ganz oder teilweise aus dem Wasser heben und beim Aussetzen das See- oder Unterseegerät (7) ganz oder teilweise in das Wasser absenken kann, durch Rotation der ein oder mehreren Schutzelemente (5) um den Schlitten (2);• wenigstens ein Schutzelement (5) mit der Gleitzone (17) zusammenwirken kann, um zu bewirken, dass das See- oder Unterseegerät (7) von einem Träger von wenigstens einem Schutzelement (5) auf einen Träger der Rampe (11) oder vom Träger der Rampe (11) auf den Träger von wenigstens einem Schutzelement (5) übergeht.
- System nach einem vorherigen Anspruch, das wenigstens zwei miteinander fest verbundene Schutzelemente (5) umfasst.
- System nach einem der vorherigen Ansprüche, wobei das oder jedes Schutzelement (5) den Schutzteil (4) und einen Arm (3) umfasst, durch eine komplette Verbindung miteinander verbunden, und so, dass der oder jeder Arm (3) mit einer Schwenkverbindung mit dem Schlitten (2) verbunden ist.
- System nach einem der vorherigen Ansprüche, wobei jeder Schutzteil (4) wenigstens einen gekrümmten Teil umfasst und die Bewegungen des See- oder Unterseegeräts (7) begrenzen kann.
- System nach einem der vorherigen Ansprüche, bei dem wenigstens ein Teil eines Schutzteils (4) ausgespart ist, so dass es nicht mit zerbrechlichen Teilen des See- oder Unterseegeräts (7) in Kontakt kommen kann.
- System nach einem der vorherigen Ansprüche, bei dem die Schwenkverbindung frei drehbar ist.
- System nach einem der vorherigen Ansprüche, bei dem wenigstens ein Schutzteil (4) wenigstens eine Rolle (10) umfasst, die an einem ihrer Enden montiert ist und gemäß einer zweiten Achse parallel zur Wasseroberfläche (25) schwenkt, wenn das System an dem Schiff (6) befestigt ist.
- System nach einem der vorherigen Ansprüche, bei dem wenigstens ein Schutzteil (4) wenigstens eine Rolle (10) umfasst, die an einem Teil des Schutzteils (4) montiert ist, der mit der Gleitzone (17) zusammenwirken kann und gemäß einer zweiten Achse parallel zur Wasseroberfläche (25) schwenkt, wenn das System an dem Schiff (6) befestigt ist.
- System nach einem der vorherigen Ansprüche, das ein Zugmittel (14) umfasst, das das Gleiten des See- oder Unterseegeräts (7) auf der Rampe (11) steuern kann.
- System nach einem der vorherigen Ansprüche, bei dem wenigstens ein Schutzelement (5) eine Anbringvorrichtung umfasst, die es zulässt, das See- oder Unterseegerät mit dem wenigstens einen Schutzelement (5) zu verbinden.
- System nach einem der Ansprüche 9 bis 10, bei dem das Zugmittel (14) eine Winde (15), ein Zugkabel (16) und ein Antriebsmittel (20) umfasst, so dass das Zugseil (16) fest mit dem See- oder Unterseegerät (7) verbunden und von der Winde (15) angetrieben werden kann, die wiederum fest mit dem Trägerschiff (6) verbunden ist, und so dass der Schlitten (2) eine Klüse (26) umfasst, die das Zugseil (16) in der Achse der Rampe (11) führen kann.
- System nach einem der vorherigen Ansprüche, von dem wenigstens eine Gleitzone (17) die Rotation von wenigstens einem Schutzelement (5) um den Schlitten (2) beim Gleiten des Schlittens (2) auf der Rampe (11) bewirken kann, wobei das See- oder Unterseegerät (7) lokal angehoben wird, um seine Bergung oder Aussetzung zu erleichtern.
- System nach einem der vorherigen Ansprüche, das wenigstens ein Anhebelement (18) umfasst, das fest mit mindestens einer der Gleitzonen (17) verbunden ist, wobei wenigstens ein Schutzelement (5) mit wenigstens einem Anhebelement (18) zusammenwirken kann, um zu bewirken, dass das See- oder Unterseegerät (7) von einem Träger von wenigstens einem Schutzelement (5) auf einen Träger der Rampe (11) oder von dem Träger der Rampe (11) auf den Träger des wenigstens einen Schutzelements (5) übergehen kann.
- System nach einem der vorherigen Ansprüche, bei dem wenigstens ein Anhebelement (18) durch Kontakt die Rotation von wenigstens einem Schutzelement (5) um den Schlitten (2) beim Gleiten des Schlittens (2) auf der Rampe (11) bewirken kann, wobei das See- oder Unterseegerät (7) lokal angehoben wird, um seine Bergung oder seine Aussetzung zu erleichtern.
- System nach einem der vorherigen Ansprüche, das die Trimmung des See- oder Unterseegeräts (7) beim Aussetzen oder Bergen des See- oder Unterseegeräts (7) modifizieren kann.
- Schiff (6), ausgestattet mit wenigstens einem System nach einem der vorherigen Ansprüche.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1402392A FR3027585B1 (fr) | 2014-10-24 | 2014-10-24 | Systeme de mise a l'eau et de recuperation d'engin marin et sous-marin assiste par des protections inclinables |
| PCT/EP2015/074624 WO2016062870A1 (fr) | 2014-10-24 | 2015-10-23 | Systeme de mise a l'eau et de recuperation d'engin marin et sous-marin assiste par des protections inclinables |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3209546A1 EP3209546A1 (de) | 2017-08-30 |
| EP3209546B1 true EP3209546B1 (de) | 2019-07-31 |
Family
ID=52450175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15784397.0A Active EP3209546B1 (de) | 2014-10-24 | 2015-10-23 | System zum aussetzen und bergen von see- und unterseevorrichtungen mit unterstützung durch kippbare schutzkomponenten |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10232915B2 (de) |
| EP (1) | EP3209546B1 (de) |
| CA (1) | CA2965577C (de) |
| DK (1) | DK3209546T3 (de) |
| FR (1) | FR3027585B1 (de) |
| SG (1) | SG11201703287SA (de) |
| WO (1) | WO2016062870A1 (de) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109533237B (zh) * | 2017-09-22 | 2020-06-19 | 中国科学院沈阳自动化研究所 | 一种自主水下机器人布放回收单点起吊止荡保护装置 |
| DE102017220932A1 (de) * | 2017-11-23 | 2019-05-23 | Thyssenkrupp Ag | Vorrichtung und Verfahren zum Aufnehmen eines Wasserfahrzeugs mittels einer Kette |
| NO345094B1 (en) | 2018-09-21 | 2020-09-28 | Usea As | A marine structure comprising a launch and recovery system |
| FR3087544B1 (fr) * | 2018-10-22 | 2020-09-18 | Thales Sa | Systeme sonar |
| FR3131264A1 (fr) | 2021-12-23 | 2023-06-30 | Thales | Systeme pour la manoeuvre d un engin marin |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2568330A (en) * | 1945-10-19 | 1951-09-18 | Thomas J Flippin | Extensible ramp for ships |
| US3596623A (en) * | 1967-05-31 | 1971-08-03 | Litton Systems Inc | Double-hinged flotation ramp |
| US3508510A (en) * | 1968-08-21 | 1970-04-28 | Litton Systems Inc | Lighter hydrolift device |
| DE4140201C2 (de) * | 1991-12-03 | 1996-04-04 | Fr Luerssen Werft Gmbh & Co | Vorrichtung für das Ausbringen und Einholen von Schleppkörpern |
| US5253605A (en) * | 1992-12-21 | 1993-10-19 | Applied Remote Technology, Inc. | Method and apparatus for deploying and recovering water borne vehicles |
| US6843198B1 (en) * | 2002-07-31 | 2005-01-18 | Columbia Research Corporation | Transport, launch and recovery craft |
| US6779475B1 (en) * | 2003-09-15 | 2004-08-24 | The United States Of America As Represented By The Secretary Of The Navy | Launch and recovery system for unmanned underwater vehicles |
| US7156036B2 (en) * | 2005-05-13 | 2007-01-02 | Seiple Ronald L | Launch and recovery system |
| US7581507B2 (en) * | 2007-02-26 | 2009-09-01 | Physical Sciences, Inc. | Launch and recovery devices for water vehicles and methods of use |
| US8430049B1 (en) | 2009-07-13 | 2013-04-30 | Vehicle Control Technologies, Inc. | Launch and recovery systems and methods |
| FR2968268B1 (fr) * | 2010-12-07 | 2013-08-30 | Thales Sa | Systeme de mise a l'eau et de recuperation d'engins sous-marins, notamment d'engins sous-marins tractes |
| US8967067B2 (en) * | 2010-12-07 | 2015-03-03 | Thales | System for launching and recovering underwater vehicles, notably towed underwater vehicles |
| SE535880C2 (sv) * | 2011-03-04 | 2013-01-29 | Marine Performance Scandinavia Ab | Lyftanordning för hantering av flytetyg vid en båt |
| FR2978422B1 (fr) * | 2011-07-26 | 2014-12-12 | Eca Robotics | Engin marin ou sous-marin et procede d'arrimage associe |
| CN203864936U (zh) * | 2014-03-20 | 2014-10-08 | 中国舰船研究设计中心 | 一种自动挂钩尾滑道式收艇装置 |
-
2014
- 2014-10-24 FR FR1402392A patent/FR3027585B1/fr not_active Expired - Fee Related
-
2015
- 2015-10-23 US US15/520,395 patent/US10232915B2/en active Active
- 2015-10-23 DK DK15784397T patent/DK3209546T3/da active
- 2015-10-23 SG SG11201703287SA patent/SG11201703287SA/en unknown
- 2015-10-23 CA CA2965577A patent/CA2965577C/fr active Active
- 2015-10-23 EP EP15784397.0A patent/EP3209546B1/de active Active
- 2015-10-23 WO PCT/EP2015/074624 patent/WO2016062870A1/fr active Application Filing
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2965577C (fr) | 2022-12-06 |
| US20170320547A1 (en) | 2017-11-09 |
| WO2016062870A1 (fr) | 2016-04-28 |
| FR3027585A1 (fr) | 2016-04-29 |
| DK3209546T3 (da) | 2019-11-04 |
| FR3027585B1 (fr) | 2017-09-01 |
| EP3209546A1 (de) | 2017-08-30 |
| SG11201703287SA (en) | 2017-05-30 |
| CA2965577A1 (fr) | 2016-04-28 |
| US10232915B2 (en) | 2019-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2648970B1 (de) | System zum freigeben und bergen eines unterwassergeräts | |
| EP3209546B1 (de) | System zum aussetzen und bergen von see- und unterseevorrichtungen mit unterstützung durch kippbare schutzkomponenten | |
| EP2043911B1 (de) | Anlage und verfahren zur wiederherstellung eines unterwasser- oder wasserfahrzeugs | |
| EP2855252B1 (de) | System zum starten und zurückholen von unterwasserfahrzeugen, insbesondere gezogenen unterwasserfahrzeugen | |
| EP2043913B1 (de) | Vorrichtung zur wiederherstellung eines unterwasser- oder wasserfahrzeugs | |
| EP2551185B1 (de) | Wasser- oder Unterwassergerät und entsprechendes Ankoppelungsverfahren | |
| EP2547938A1 (de) | Verfahren zum verlegen eines unterwasserkabels auf dem meeresgrund | |
| CA2960706C (fr) | Engin marin ou sous-marin et procede d'arrimage associe | |
| EP2480449B1 (de) | System zur beladung/entladung eines fahrzeugs von einem trägerschiff aus und entsprechendes trägerschiff | |
| CA3132142A1 (fr) | Systeme de recuperation d'un engin marin de surface depuis un navire porteur | |
| FR3062844A1 (fr) | Systeme de mise a l'eau et de recuperation d'un engin propulse depuis le pont d'un navire porteur | |
| FR2994560A1 (fr) | Dispositif permettant de remorquer un engin sous-marin autonome | |
| EP3976461B1 (de) | Unterwasservorrichtung und unterwassersystem | |
| CA2124103C (fr) | Procede et dispositif de levage de manutention de charge en mer | |
| EP2621796B1 (de) | System mit einem unterwasserfahrzeug und einer basis an der oberfläche | |
| EP2420440A1 (de) | Vorrichtung für die Bergung eines Wasser- oder Unterwassergeräts | |
| EP3976460B1 (de) | Sonarvorrichtung und sonarsystem | |
| EP3871000B1 (de) | Sonarsystem | |
| WO2014108631A1 (fr) | Barge flottante submersible | |
| WO2023117564A1 (fr) | Systeme pour la manœuvre d'un engin marin | |
| EP4452742A1 (de) | System zum manövrieren eines wasserfahrzeugs | |
| WO2023175264A1 (fr) | Véhicule tracté sous-marin et système de récupération d'un tel véhicule sous-marin |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170515 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20181203 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAL | Information related to payment of fee for publishing/printing deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20190418 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1160602 Country of ref document: AT Kind code of ref document: T Effective date: 20190815 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602015034875 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20191101 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20190731 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1160602 Country of ref document: AT Kind code of ref document: T Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191202 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191031 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191101 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200224 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602015034875 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG2D | Information on lapse in contracting state deleted |
Ref country code: IS |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191031 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191023 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191030 |
|
| 26N | No opposition filed |
Effective date: 20200603 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20151023 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190731 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230606 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NO Payment date: 20231010 Year of fee payment: 9 Ref country code: DK Payment date: 20231016 Year of fee payment: 9 Ref country code: DE Payment date: 20230919 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240919 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20240917 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240923 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240926 Year of fee payment: 10 |