EP3010845B1 - Kompensationsseilscheibenanordnung - Google Patents
Kompensationsseilscheibenanordnung Download PDFInfo
- Publication number
- EP3010845B1 EP3010845B1 EP14735487.2A EP14735487A EP3010845B1 EP 3010845 B1 EP3010845 B1 EP 3010845B1 EP 14735487 A EP14735487 A EP 14735487A EP 3010845 B1 EP3010845 B1 EP 3010845B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cylinders
- monitoring
- sheaves
- rocker
- loads
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012544 monitoring process Methods 0.000 claims description 25
- 238000000034 method Methods 0.000 claims description 13
- 230000007257 malfunction Effects 0.000 claims description 9
- 238000006073 displacement reaction Methods 0.000 claims description 7
- 230000000712 assembly Effects 0.000 claims description 4
- 238000000429 assembly Methods 0.000 claims description 4
- 230000001960 triggered effect Effects 0.000 claims description 4
- 230000002146 bilateral effect Effects 0.000 claims description 2
- 238000007599 discharging Methods 0.000 claims description 2
- 238000012423 maintenance Methods 0.000 claims description 2
- 230000007704 transition Effects 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 238000005065 mining Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/54—Safety gear
- B66D1/58—Safety gear responsive to excess of load
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
- B66B7/06—Arrangements of ropes or cables
- B66B7/10—Arrangements of ropes or cables for equalising rope or cable tension
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/36—Guiding, or otherwise ensuring winding in an orderly manner, of ropes, cables, or chains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/40—Control devices
- B66D1/48—Control devices automatic
- B66D1/50—Control devices automatic for maintaining predetermined rope, cable, or chain tension, e.g. in ropes or cables for towing craft, in chains for anchors; Warping or mooring winch-cable tension control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D5/00—Braking or detent devices characterised by application to lifting or hoisting gear, e.g. for controlling the lowering of loads
- B66D5/02—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes
Definitions
- the present invention relates to a compensating cable pulley arrangement for drum conveyors with at least two sheaves guided vertically in slide frames and mounted on hydraulically short closed cylinders and a corresponding method as described by the preambles of the independent claims.
- the known systems now lack the ability to detect incorrect behavior on the one hand of the compensating cable pulley device or to detect faulty reeling via the loads on the compensating pulley, and to initiate necessary safety measures.
- the object of the present invention is therefore to provide a compensating cable pulley device and a corresponding method for operating the same, which offers the possibility of detecting and correcting incorrect behavior in the overall system monitor.
- the system should provide monitoring functions, contain safety measures and be able to intervene in the machine control of the drum carrier, which is provided with the Kompensationsseilusionnvorraum.
- the hydraulic system of the compensating sheave device should be mechanically monitored to indicate a malfunction or failure and to take safety measures.
- Kompensationsseilutionnan Extract for drum conveyors with at least two vertically guided in sliding frame and mounted on hydraulically short cylinders sheaves, which is characterized in accordance with the present invention, characterized in that a multi-redundant monitoring of the different acting on the sheaves rope loads on the hydraulic cylinder is provided , which is communicatively connected to the plant control of the drum carrier.
- the Kompensationsseillismnan Aunt is characterized by the fact that the multi-redundant monitoring of the different acting on the pulleys rope loads on the hydraulic cylinder at least from at least one linear transducer, at least one Wegendschalter and a cylinder pressure monitoring.
- a mechanical stop is provided above the respective lower cylinder end point, for safe lowering of the slide frame in the event of an overload in the hydraulic system and avoidance of mechanical damage to the respective cylinder.
- the compensation cable pulley arrangement may be characterized in that the hydraulically short closed Cylinders are arranged on a mechanical load balance rocker with mechanical stop on both sides to accommodate the loads of the sheaves, which is at the same loads on the sheaves in balance.
- the load balance rocker can be provided on both sides each with spring packs that allow a tolerance value for the rockers.
- a linear transducer for measuring the rocker be mounted whose path difference is constantly monitored by the plant control of the drum carrier.
- a method for operating a Kompensationsseilutionnan Aunt for drum conveyors with at least two vertically guided in sliding frame and mounted on hydraulically short cylinders sheaves provided by the provision of a multi-redundant and communicatively connected to the plant control of the drum carrier monitoring the different on the pulleys acting rope loads on the hydraulic cylinder excels.
- This method can be designed such that the multi-redundant monitoring continuous monitoring of the position of the cylinder by a position measuring system, monitoring the position of the cylinder by providing limit switches at the transition points of the working areas and a continuous monitoring of the pressure in the cylinders and discharging the oil into a tank when a defined value is exceeded and lowering the slide frame to mechanical stops above the lower cylinder end points.
- a mechanical load balance rocker be provided with bilateral, mechanical stop for receiving the loads of the sheaves, which is at the same loads on the sheaves in balance.
- a linear transducer can be provided on both sides of the load balance rocker, the path difference of which is constantly monitored by the plant control and, if the difference is too large and leaves the range of tolerance, found the malfunction of the system and triggered a safety braking of the entire system becomes.
- the hydraulic control of the entire system, including drum carrier and compensation disc device can be designed so that for maintenance purposes, both cylinders together or each cylinder can be driven separately up and down.
- the compensation of the rope loads is hydraulic.
- the position of the cylinders is constantly monitored. If a cylinder leaves the normal working area, a warning is issued and the shutdown circuit of the entire system is triggered. If a cylinder leaves the max. Compensation area, is assumed by a Albertspulung and it is triggered a safety braking. If the load in both ropes becomes too large, damage to the hydraulic system and the cylinders will be prevented. A malfunction of the hydraulically operating system is monitored by means of the mechanical safety devices.
- the device and the method according to the invention therefore provides a multiple monitoring of the different rope loads through the compensating pulleys, as well as a monitoring of the compensating pulleys and malfunction of the hydraulic system.
- the mechanical stops protect the compensating cable pulleys from damage caused by cable overload or from excessive operating load.
- FIG.1 the side view of a preferred embodiment of Kompensationsseilutionnvorraum according to the invention can be seen.
- There are two pulleys 10 guided vertically in slide frame 8 and mounted on hydraulically short closed cylinders 1 can be seen.
- the guide of the slide frame 8 takes place by means of steel structural frames 12 arranged guide rails 14, on each of which the slide frame 8 arranged end rollers 16 and edge rollers 18 run.
- the compensating rope pulley device as in Fig. 1 has a multi-redundant monitoring of the different acting on the sheaves 10 rope loads on the hydraulic cylinder 1, which communicatively connected to the plant control (not shown) of the drum carrier (not shown).
- the multi-redundant monitoring of the different acting on the sheaves 10 rope loads on the hydraulic cylinder 1 is in the preferred embodiment per cylinder 1 from a linear displacement sensor 20, an upper Vorabschalter 7c and an upper Endabschalter 7b, a lower Vorabschalter 7c and an upper Endabschalter 7b and a cylinder pressure monitoring (not shown) of the cylinder 1.
- the displacement measuring devices 20 transmit the position of the respective sheave 10 to the electrical control (not shown).
- the limit switches 7c, 7b are used for warning and end position shutdown.
- a mechanical stop 22 is provided above the respective lower cylinder end point, for safe lowering of the slide frame 8 in case of overload in the hydraulic system and avoidance of mechanical damage to the respective cylinder.
- the Kompensationsseillismnan Aunt after Fig. 1 a load balance rocker 24 for receiving the loads of the pulleys 10 with on both sides, mechanical stop on which the hydraulically short closed cylinder 1 are arranged. At the same loads on the pulleys 10, this load balance rocker 24 is in balance.
- the load balance rocker 24 is provided on both sides in each case with spring packs 26, which allow a tolerance value for the rockers.
- the Fig. 2 shows the compensation rope pulley device Fig. 1 shown without steel construction and slightly enlarged for better visibility of the essential elements of the Kompensationsseilutionnvorraum.
- the illustrated elements are identical to those of Fig. 1 ,
- the Fig. 3 moreover, shows an isolated cylinder 1 of the arrangement according to FIGS FIGS. 1 and / or 2.
- linear displacement sensor 20 can be clearly seen here.
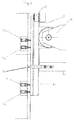
- the Fig. 4 shows a detailed view of the limit switch mounting of Kompensationsseilusionnvorraum after the FIGS. 1 and / or 2.
- the guide rails 14 on which the end rollers 16 and the edge rollers 18 arranged on the slide frame 8 run can be seen.
- the upper and lower advance switches 7c and the upper and lower limit switches 7b can also be seen.
- a arranged on the slide frame 8 switching flag 30 can be seen, with the aid of the advance and limit switches 7c, 7b can be actuated when the slide frame 8 passes over corresponding area, which would lead to the shutdown of the entire system.
- the Fig. 5 shows a diagram showing the working areas of the cylinder 1 Fig. 3 and Fig. 4 illustrated.
- the positions b and c correspond to the locations of the advance and end switches 7c, 7b.
- Point a) defines in the diagram a mechanical safety area of the cylinder 1 up to the retracted end position.
- the points b) each define a border area, which is referred to as security and Albertspul Hoch. If the switch flag is located in these areas, this is a clear indication of a malfunction (faulty winding) of the system and the system is shut down via safety braking.
- the points c) define a boundary area, which is called the maximum compensation area. This is the area in which the cylinders 1 are allowed to deflect as much as possible in order to compensate for differences in the rope loads resting on the sheaves 10 in order to ensure a load equilibrium in the system. In this area, a warning is issued and blocking the system after completion of the drive cycle (shutdown inhibit circuit).
- Points d define an area called a normal work area. This is the width in which the cylinder 1 is allowed to move normally to compensate for differences in the resting on the pulleys 10 rope loads.
- the point e) finally defines the starting position of the respective cylinder, which in the illustrated embodiment is located at about 55% cylinder travel above the point 0 mm (cylinder fully retracted).
- the Fig. 6 shows the detail view of the load balance rocker 24, as in the Kompensationsseilusionnvorraum after the Fig. 1 and / or 2 is provided.
- the load balance rocker 24 consists of the actual rocker 24a and the bearing block 24b. Again FIG. 6 can still be seen, the rocker on both sides eyes 28 for fixing the cylinder 1.
- the load balance rocker also has on both sides of a (not shown) mechanical stop, in the event that the load balance rocker 24 is significantly deflected. This would only be the case with unequal loads on the pulleys 10, ie in the case of a danger or malfunction. At the same loads on the pulleys 10, the load balance rocker 24, however, in balance. Again Fig.
- a control scheme of the hydraulic system of Kompensationsseilutionnvorraum after the preceding FIGS. 1 to 7 ,
- a control block 1a is integrated on each cylinder 1.
- the cylinder volume balance out by means of pipe or hose connection between the two control blocks. With cable break load, the resulting overpressure on the valve 5 is limited.
- the corresponding balancing cylinder 1 is locked and the second balancing cylinder 1 can be compensated by means of the directional control valves in the hydraulic unit in its stroke position relative to the locked cylinder.
- the pressure switches 2 indicate the change of the load conditions and transmit the values to the electric control (not shown).
- the displacement measuring devices 20 transmit the position of the respective pulley to the (not shown) electrical control.
- the limit switches 7 (7a, 7b) are used for warning (shutdown inhibit circuit) and end position shutdown (shutdown by safety braking).
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
- Fluid-Pressure Circuits (AREA)
- Types And Forms Of Lifts (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
- Jib Cranes (AREA)
Description
- Die vorliegende Erfindung betrifft eine Kompensationsseilscheibenanordnung für Trommelfördermaschinen mit zumindest zwei vertikal in Gleitrahmen geführten und auf hydraulisch kurz geschlossenen Zylindern gelagerten Seilscheiben und ein entsprechendes Verfahren, wie durch die Oberbegriffe der Unabhängigen Ansprüche beschrieben.
- Im Bergbau kommen Trommelmaschinen zum Einsatz, die zwei Seile gleichgerichtet spulen (sogenannte Blairanordnung), welche an einem Fördermittel angeschlagen sind. Während eines Förderzyklus dehnen sich die zwei Förderseile auf Grund ihrer mechanischen Eigenschaft unterschiedlich. Um diese unterschiedliche Dehnung der Förderseile auszugleichen, ist es eine bekannte Vorgehensweise Kompensationsseilscheiben vorzusehen, die gleichzeitig dafür Sorge tragen, dass beide Förderseile ständig gleich belastet sind
- Zusätzlich kann es beim Auftrommeln der Seile auf die jeweiligen Trommeln der Trommelfördermaschine zum sogenannten Fehlspulen kommen, bei dem eines der Förderseile nicht in der richtigen Seillage aufgewickelt wird.
- Damit nun beide Seile gleich belastet werden, werden die Seilscheiben vertikal geführt auf Zylinder gelagert und diese hydraulisch kurz geschlossen, so dass ein Ölausgleich erfolgen kann und sich die Seilscheiben vertikal so einstellen können, dass beide Seile die gleiche Last tragen.
- Den bekannten Systemen fehlt es aber nun an der Fähigkeit, Fehlverhalten einerseits der Kompensationsseilscheibenvorrichtung zu erkennen bzw. ein Fehlspulen über die Lasten auf den Kompensationsseilscheiben zu erkennen, und notwendige Sicherheitsmaßnahmen einzuleiten.
- Die
US3014699 offenbart eine Anordnung und ein Verfahren nach den Oberbegriffen der Ansprüche 1 und 7. - Die Aufgabe der vorliegenden Erfindung ist es daher, eine Kompensationsseilscheibenvorrichtung und ein entsprechendes Verfahren zum Betrieb derselben vorzusehen, welches die Möglichkeit bietet, Fehlverhalten im Gesamtsystem festzustellen und zu überwachen. Das System soll dabei Überwachungsfunktionen bieten, Sicherheitsmaßnahmen beinhalten und in die Maschinensteuerung der Trommelfördermaschine, welche mit der Kompensationsseilscheibenvorrichtung versehen ist, eingreifen können. Das hydraulische System der Kompensationsseilscheibenvorrichtung soll zusätzlich mechanisch überwacht werden, um ein Fehlverhalten oder Versagen anzuzeigen und Sicherheitsmaßnahmen zu ergreifen.
- Diese Aufgabe wird durch die Merkmale der unabhängigen Patentansprüche gelöst, wobei zweckmäßige Ausführungsformen durch die Merkmale der Unteransprüche beschrieben sind.
- Vorgesehen ist dabei eine Kompensationsseilscheibenanordnung für Trommelfördermaschinen mit zumindest zwei vertikal in Gleitrahmen geführten und auf hydraulisch kurz geschlossenen Zylindern gelagerten Seilscheiben, die sich nach Maßgabe der vorliegenden Erfindung dadurch auszeichnet, dass eine mehrfach redundante Überwachung der unterschiedlichen auf die Seilscheiben wirkenden Seillasten über die Hydraulikzylinder vorgesehen ist, welche mit der Anlagensteuerung der Trommelfördermaschine kommunikativ verbunden ist.
- Vorzugsweise zeichnet sich die Kompensationsseilscheibenanordnung dabei dadurch aus, dass die mehrfach redundante Überwachung der unterschiedlichen auf die Seilscheiben wirkenden Seillasten über die Hydraulikzylinder zumindest aus zumindest jeweils einem linearen Wegaufnehmer, zumindest einem Wegendschalter und einer Zylinderdrucküberwachung besteht.
- Weiterhin ist bevorzugt, dass jeweils ein mechanischer Anschlag oberhalb des jeweiligen unteren Zylinderendpunktes vorgesehen ist, zum sicheren Absenken der Gleitrahmen im Falle einer Überlast im Hydrauliksystem und Vermeidung von mechanischen Schäden an dem jeweiligen Zylinder.
- In einer weiterhin bevorzugten Ausführungsform kann die Kompensationsseilscheibenanordnung dadurch gekennzeichnet sein, dass die hydraulisch kurz geschlossenen Zylinder auf einer mechanischen Lastausgleichwippe mit beidseitigem, mechanischem Anschlag zur Aufnahme der Lasten der Seilscheiben angeordnet sind, welche bei gleichen Lasten auf den Seilscheiben in Balance ist. Die Lastausgleichswippe kann beidseitig jeweils mit Federpaketen versehen sein, die einen Toleranzwert für das Wippen zulassen. Schließlich kann an beiden Seiten der Wippe auch noch je ein linearer Wegaufnehmer zur Messung des Wippens angebracht sein, dessen Wegdifferenz ständig von der Anlagensteuerung der Trommelfördermaschine überwacht wird.
- Weiterhin ist nach Maßgabe der Erfindung ein Verfahren zum Betrieb einer Kompensationsseilscheibenanordnung für Trommelfördermaschinen mit zumindest zwei vertikal in Gleitrahmen geführten und auf hydraulisch kurz geschlossenen Zylindern gelagerten Seilscheiben vorgesehen, welches sich durch das Vorsehen einer mehrfach redundanten und mit der Anlagensteuerung der Trommelfördermaschine kommunikativ verbunden Überwachung der unterschiedlichen auf die Seilscheiben wirkenden Seillasten über die Hydraulikzylinder auszeichnet.
- Dieses Verfahren kann dabei derart ausgestaltet sein, dass die mehrfach redundante Überwachung eine kontinuierliche Überwachung der Stellung der Zylinder durch ein Wegmesssystem, eine Überwachung der Stellung der Zylinder durch das Vorsehen von Endschaltern an den Übergangspunkten der Arbeitsbereiche sowie eine kontinuierliche Überwachung des Drucks in den Zylindern und ein Ablassen des Öls in einen Tank beim Überschreiten eines definierten Wertes sowie Absenken der Gleitrahmen auf mechanische Anschläge oberhalb der unteren Zylinderendpunkte vorsieht.
- Weiterhin kann zur Überwachung des Fehlverhaltens des hydraulisch arbeitenden Systems eine mechanische Lastausgleichwippe mit beidseitigem, mechanischem Anschlag zur Aufnahme der Lasten der Seilscheiben vorgesehen werden, welche bei gleichen Lasten auf den Seilscheiben in Balance ist.
- Zur Vermeidung der Anzeige sehr geringer Lastunterschiede und um einem ständigen Kippen der Lastausgleichswippe entgegen zu wirken, können darüber hinaus zwischen Zylindern und Lastausgleichswippe Federpakete vorgesehen werden, die einen Toleranzwert für das Wippen zulassen, wobei, wenn dieser Toleranzwert überschritten wird, die Wippe einseitig aufliegt und eine Beschädigung des Systems durch ein entsprechendes Signal an die Anlagensteuerung verhindert wird.
- Weiterhin können an beiden Seiten der Lastausgleichswippe je ein linearer Wegaufnehmer vorgesehen werden, wobei die Wegdifferenz derselben ständig von der Anlagensteuerung überwacht wird und, wenn die Differenz zu groß wird und den Bereich der Toleranz verlässt, das Fehlverhalten der Anlage festgestellt und eine Sicherheitsbremsung der Gesamtanlage ausgelöst wird.
- Schließlich kann die hydraulische Steuerung der Gesamtanlage einschließlich Trommelfördermaschine und Kompensationsscheibenvorrichtung derart ausgelegt werden, dass zu Wartungszwecken beide Zylinder gemeinsam oder jeder Zylinder separat hoch und runter gefahren werden kann.
- Bei einer Vorrichtung und einem Verfahren wie beschrieben erfolgt der Ausgleich der Seillasten hydraulisch. Die Stellung der Zylinder wird ständig überwacht. Verlässt ein Zylinder den normalen Arbeitsbereich, erfolgt eine Warnung und der Abfahrsperrkreis der Gesamtanlage wird ausgelöst. Verlässt ein Zylinder den max. Kompensationsbereich, wird von einer Fehlspulung ausgegangen und es wird eine Sicherheitsbremsung ausgelöst. Wird die Last in beiden Seilen zu groß, wird eine Beschädigung am Hydrauliksystem und den Zylindern verhindert. Ein Fehlverhalten des hydraulisch arbeitenden Systems wird dabei mittels der mechanischen Sicherheitseinrichtungen überwacht.
- Die Vorrichtung und das Verfahren nach Maßgabe der Erfindung bietet daher eine Vielfachüberwachung der unterschiedlichen Seillasten durch die Kompensationsseilscheiben, sowie eine Überwachung der Kompensationsseilscheiben und Fehlfunktion der Hydraulikanlage. Die mechanischen Anschläge bieten darüber hinaus einen Schutz der Kompensationsseilscheiben vor Zerstörung durch Seilüberlast, bzw. durch zu hohe Betriebslast.
- Weitere Eigenschaften und Vorteile der Erfindung ergeben sich aus der folgenden, in keiner Weise beschränkenden, Beschreibung einer bevorzugten Ausführungsform der Erfindung unter Bezugnahme auf die beigefügten Zeichnungen. Darin zeigt:
-
Fig.1 die Seitenansicht einer Ausführungsform der Kompensationsseilscheibenvorrichtung nach Maßgabe der Erfindung; -
Fig. 2 die Kompensationsseilscheibenvorrichtung nachFig. 1 , dargestellt ohne Stahlbau; -
Fig. 3 die freigestellte Ansicht der Ausgleichszylinderanordnung der Kompensationsseilscheibenvorrichtung derFig. 1 und/oder 2; -
Fig. 4 eine Detailansicht des Endschalteranbaus der Kompensationsseilscheibenvorrichtung nach denFiguren 1 und/oder 2. -
Fig. 5 ein Diagramm, welches die Arbeitsbereiche des Zylinders nachFig. 3 illustriert; -
Fig. 6 eine Detailansicht einer Lastausgleichswippe, wie sie in der Kompensationsseilscheibenvorrichtung nach denFig. 1 und/oder 2 vorgesehen ist; -
Fig. 7 einen vergrößerten Ausschnitt der Lastausgleichswippe nachFig. 6 .; und -
Fig. 8 ein Steuerschema der hydraulischen Anlage der Kompensationsseilscheibenvorrichtung nach den vorhergehenden Figuren. - Identische Elemente sind dabei in allen Figuren mit identischen Bezugszeichen versehen.
- Der
Fig.1 ist die Seitenansicht einer bevorzugten Ausführungsform der Kompensationsseilscheibenvorrichtung nach Maßgabe der Erfindung zu entnehmen. Dabei sind zwei vertikal in Gleitrahmen 8 geführte und auf hydraulisch kurz geschlossenen Zylindern 1 gelagerte Seilscheiben 10 zu erkennen. Die Führung der Gleitrahmen 8 erfolgt dabei mittels an Stahlbauständern 12 angeordneten Führungsschienen 14, auf denen jeweils an den Gleitrahmen 8 angeordnete Stirnrollen 16 und Flankenrollen 18 laufen. - Die Kompensationsseilscheibenvorrichtung wie in
Fig. 1 dargestellt weist eine mehrfach redundante Überwachung der unterschiedlichen auf die Seilscheiben 10 wirkenden Seillasten über die Hydraulikzylinder 1 auf, welche mit der Anlagensteuerung (nicht dargestellt) der Trommelfördermaschine (nicht dargestellt) kommunikativ verbunden ist. - Die mehrfach redundante Überwachung der unterschiedlichen auf die Seilscheiben 10 wirkenden Seillasten über die Hydraulikzylinder 1 besteht in der bevorzugten Ausführungsform dabei pro Zylinder 1 aus jeweils einem linearen Wegaufnehmer 20, einem oberen Vorabschalter 7c sowie einem oberen Endabschalter 7b, einem unteren Vorabschalter 7c sowie einem oberen Endabschalter 7b und einer Zylinderdrucküberwachung (nicht dargestellt) der Zylinder 1. Die Wegmesseinrichtungen 20 übertragen die Position der jeweiligen Seilscheibe 10 an die elektrische Steuerung (nicht dargestellt). Die Endschalter 7c, 7b dienen zur Warnung und Endlagenabschaltung.
- Weiterhin ist der
Fig. 1 zu entnehmen, dass jeweils ein mechanischer Anschlag 22 oberhalb des jeweiligen unteren Zylinderendpunktes vorgesehen ist, zum sicheren Absenken der Gleitrahmen 8 im Falle einer Überlast im Hydrauliksystem und Vermeidung von mechanischen Schäden an dem jeweiligen Zylinder. - Schließlich weist die Kompensationsseilscheibenanordnung nach
Fig. 1 eine Lastausgleichswippe 24 zur Aufnahme der Lasten der Seilscheiben 10 mit beidseitigem, mechanischem Anschlag auf, auf der die hydraulisch kurz geschlossenen Zylinder 1 angeordnet sind. Bei gleichen Lasten auf den Seilscheiben 10 ist diese Lastausgleichswippe 24 in Balance. Darüber hinaus ist die Lastausgleichswippe 24 beidseitig jeweils mit Federpaketen 26 versehen, die einen Toleranzwert für das Wippen zulassen. - Die
Fig. 2 zeigt die Kompensationsseilscheibenvorrichtung nachFig. 1 dargestellt ohne Stahlbau und etwas vergrößert zur besseren Sichtbarkeit der wesentlichen Elemente der die Kompensationsseilscheibenvorrichtung. Die dargestellten Elemente sind identisch zu denjenigen derFig. 1 . - Die
Fig. 3 zeigt darüber hinaus einen freigestellten Zylinder 1 der Anordnung nach denFiguren 1 und/oder 2. Insbesondere der bereits im Zusammenhang mit derFig. 1 erwähnte am Zylinder 1 vorgesehene lineare Wegaufnehmer 20 ist hier deutlich zu erkennen. - Die
Fig. 4 zeigt eine Detailansicht des Endschalteranbaus der Kompensationsseilscheibenvorrichtung nach denFiguren 1 und/oder 2. Zu erkennen sind dabei die Führungsschienen 14, auf denen die an den Gleitrahmen 8 angeordnete Stirnrollen 16 und Flankenrollen 18 laufen. Zu erkennen sind dabei aber auch die oberen und unteren Vorabschalter 7c sowie die oberen und unteren Endabschalter 7b. DerFig. 4 ist aber darüber hinaus auch eine an dem Gleitrahmen 8 angeordnete Schaltfahne 30 zu entnehmen, mit deren Hilfe die Vorab- und Endschalter 7c, 7b betätigt werden können, wenn der Gleitrahmen 8 entsprechende Bereich überfährt, was zur Abschaltung der Gesamtanlage führen würde. - Die
Fig. 5 zeigt dabei ein Diagramm, welches die Arbeitsbereiche des Zylinders 1 nachFig. 3 undFig. 4 illustriert. Die Positionen b und c entsprechen dabei den Orten der Vorab- und Endschalter 7c, 7b. Der Punkt a) definiert in dem Diagramm einen mechanischen Sicherheitsbereich des Zylinders 1 bis zur eingefahrenen Endlage. - Die Punkte b) definieren jeweils einen Grenzbereich, der als Sicherheits- und Fehlspulbereich bezeichnet wird. Befindet sich die Schaltfahne in diesen Bereichen, ist dies ein deutliches Indiz für eine Fehlfunktion (Fehlspulen) der Anlage und die Anlage wird über Sicherheitsbremsung stillgesetzt.
- Die Punkte c) definieren einen Grenzbereich, der als maximaler Kompensationsbereich bezeichnet wird. Dies ist der Bereich, in den die Zylinder 1 maximal auslenken dürfen um Unterschiede in der auf den Seilscheiben 10 ruhenden Seillasten auszugleichen, um für ein Lastgleichgewicht im System zu sorgen. In diesem Bereich erfolgt eine Warnung und Blockieren der Anlage nach Beendigung des Fahrzyklus (Abfahrsperrkreis).
- Die Punkte d) definieren einen Bereich, der als normaler Arbeitsbereich bezeichnet wird. Diese ist die Breite, in der sich der Zylinder 1 normaler Weise bewegen darf, um Unterschiede in der auf den Seilscheiben 10 ruhenden Seillasten auszugleichen.
- Der Punkt e) schließlich definiert die Startposition des jeweiligen Zylinders, die sich bei der dargestellten Ausführungsform bei ca. 55% Zylinderfahrweg oberhalb des Punktes 0 mm (Zylinder voll eingefahren) befindet.
- Die
Fig. 6 zeigt die Detailansicht der Lastausgleichswippe 24, wie sie in der Kompensationsseilscheibenvorrichtung nach denFig. 1 und/oder 2 vorgesehen ist. Die Lastausgleichswippe 24 besteht dabei aus der eigentlichen Wippe 24a sowie dem Lagerbock 24b. Wie derFigur 6 weiterhin zu entnehmen ist, weist die Wippe beidseitig Augen 28 zur Fixierung der Zylinder 1 auf. Die Lastausgleichswippe weist darüber hinaus beidseitig einen (nicht dargestellten) mechanischem Anschlag auf, für den Fall, dass die Lastausgleichswippe 24 deutlich ausgelenkt wird. Dies wäre nur bei ungleichen Lasten auf den Seilscheiben 10 der Fall d.h. im Falle einer Gefahr- oder Fehlfunktion. Bei gleichen Lasten auf den Seilscheiben 10 ist die Lastausgleichswippe 24 hingegen in Balance. Wie derFig. 6 ebenfalls zu entnehmen ist, sind, um der Anzeige sehr geringer Lastunterschiede und dem ständigen Kippen der Lastausgleichswippe 24 entgegen zu wirken, zur Unterstützung zu beiden Seiten der Wippe Federpakete 26 angebracht, die einen Toleranzwert für das Wippen zulassen. Wird dieser Toleranzwert überschritten, liegt die Wippe 24 einseitig auf und eine Beschädigung des Systems wird verhindert. An beiden Seiten der Lastausgleichswippe 24 ist, wie inFig. 7 zu erkennen, auch noch je ein linearer Wegaufnehmer 32 zur Messung des Wippens angebracht, dessen Wegdifferenz ständig von der Anlagensteuerung (nicht dargestellt) der Trommelfördermaschine überwacht wird. - Die
Fig. 8 schließlich zeigt ein Steuerschema der hydraulischen Anlage der Kompensationsseilscheibenvorrichtung nach den vorhergehendenFiguren 1 bis 7 . Für die hydraulische Ausgleichsschaltung ist an jedem Zylinder 1 ein Steuerblock 1a integriert. Über eine Rohrbruchsicherung 3 und ein Schaltventil 4 kann sich das Zylindervolumen mittels Rohr- bzw. Schlauchverbindung zwischen beiden Steuerblöcken ausgleichen. Bei Seilbruchlast wird der entstehende Überdruck am Ventil 5 begrenzt. Durch Schalten der Ventile 4 wird der entsprechende Ausgleichszylinder 1 gesperrt und der zweite Ausgleichszylinder 1 kann mittels der Wegeventile im Hydraulikaggregat in seiner Hubposition gegenüber dem gesperrten Zylinder ausgeglichen werden. Auf der Zylinderstangenseite dient der Leitungsanschluss zum Ausgleichen der Volumen bzw. kann bei Seilbruch und Senken der Arbeitsposition Ölvolumen aus dem Ölbehälter des Hydraulikaggregates 34 nachgesaugt werden. Die Druckschalter 2 zeigen die Veränderung der Lastverhältnisse an und übertragen die Werte in die elektrische Steuerung (nicht dargestellt). Die Wegmesseinrichtungen 20 übertragen die Position der jeweiligen Seilscheibe an die (nicht dargestellte) elektrische Steuerung. Die Endschalter 7 (7a, 7b) dienen der Warnung (Abfahrsperrkreis) und Endlagenabschaltung (Anlagenstillsetzung durch Sicherheitsbremsung).
Claims (12)
- Kompensationsseilscheibenanordnung für Trommelfördermaschinen mit zumindest zwei vertikal in Gleitrahmen (8) geführten und auf hydraulisch kurz geschlossenen Zylindern (1) gelagerten Seilscheiben (10), dadurch gekennzeichnet, dass eine mehrfach redundante Überwachung der unterschiedlichen auf die Seilscheiben wirkenden Seillasten über die Hydraulikzylinder vorgesehen ist, welche mit der Anlagensteuerung der Trommelfördermaschine kommunikativ verbunden ist.
- Kompensationsseilscheibenanordnung nach Anspruch 1, dadurch gekennzeichnet, dass die mehrfach redundante Überwachung der unterschiedlichen auf die Seilscheiben wirkenden Seillasten über die Hydraulikzylinder zumindest aus zumindest jeweils einem linearen Wegaufnehmer (20), zumindest einem Wegendschalter und zumindest einer Zylinderdrucküberwachung besteht.
- Kompensationsseilscheibenanordnung nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass jeweils ein mechanischer Anschlag (22) oberhalb des jeweiligen unteren Zylinderendpunktes vorgesehen ist, zum sicheren Absenken der Gleitrahmen im Falle einer Überlast im Hydrauliksystem und Vermeidung mechanische Schäden an dem jeweiligen Zylinder.
- Kompensationsseilscheibenanordnung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die hydraulisch kurz geschlossenen Zylinder auf einer mechanischen Lastausgleichwippe (24) mit beidseitigem, mechanischem Anschlag zur Aufnahme der Lasten der Seilscheiben angeordnet sind, welche bei gleichen Lasten auf den Seilscheiben in Balance ist.
- Kompensationsseilscheibenanordnung nach Anspruch 4, dadurch gekennzeichnet, dass die Lastausgleichswippe beidseitig jeweils mit einem Federpakete (26) versehen ist, die einen Toleranzwert für das Wippen zulassen.
- Kompensationsseilscheibenanordnung nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass an beiden Seiten der Wippe je ein linearer Wegaufnehmer (32) zur Messung des Wippens angebracht ist, dessen Wegdifferenz ständig von der Anlagensteuerung überwacht wird.
- Verfahren zum Betrieb einer Kompensationsseilscheibenanordnung für Trommelfördermaschinen mit zumindest zwei vertikal in Gleitrahmen (8) geführten und auf hydraulisch kurz geschlossenen Zylindern (1) gelagerten Seilscheiben (10), gekennzeichnet durch das Vorsehen einer mehrfach redundanten und mit der Anlagensteuerung der Trommelfördermaschine kommunikativ verbunden Überwachung der unterschiedlichen auf die Seilscheiben wirkenden Seillasten über die Hydraulikzylinder.
- Verfahren nach Anspruch 7, dadurch gekennzeichnet, dass die mehrfach redundante Überwachung die folgenden Schritte umfasst:a. Kontinuierliche Überwachung der Stellung der Zylinder durch ein Wegmesssystem;b. Überwachung der Stellung der Zylinder durch das Vorsehen von Endschaltern (7) an den Übergangspunkten der Arbeitsbereiche;c. Kontinuierliche Überwachung des Drucks in den Zylindern und Ablassen des Öls in einen Tank beim Überschreiten eines definierten Wertes sowie Absenken der Gleitrahmen auf mechanische Anschläge oberhalb der unteren Zylinderendpunkte.
- Verfahren nach Anspruch 7 oder 8, dadurch gekennzeichnet, dass weiterhin zur Überwachung des Fehlverhaltens des hydraulisch arbeitenden Systems eine mechanische Lastausgleichwippe (24) mit beidseitigem, mechanischem Anschlag zur Aufnahme der Lasten der Seilscheiben vorgesehen wird, welche bei gleichen Lasten auf den Seilscheiben in Balance ist.
- Verfahren nach Anspruch 9, dadurch gekennzeichnet, dass zur Vermeidung der Anzeige sehr geringer Lastunterschiede und um einem ständigen Kippen der Lastausgleichswippe entgegen zu wirken, zwischen Zylindern und Lastausgleichswippe Federpakete (26) vorgesehen werden, die einen Toleranzwert für das Wippen zulassen, wobei, wenn dieser Toleranzwert überschritten wird, die Wippe einseitig aufliegt und eine Beschädigung des Systems durch in entsprechendes Signal an die Anlagensteuerung verhindert wird.
- Verfahren nach Anspruch 9 oder 10, dadurch gekennzeichnet, dass weiterhin an beiden Seiten der Lastausgleichswippe je ein linearer Wegaufnehmer (32) vorgesehen wird, wobei die Wegdifferenz derselben ständig von der Anlagensteuerung überwacht wird und, wenn die Differenz zu groß wird und den Bereich der Toleranz verlässt, das Fehlverhalten der Anlage festgestellt und eine Sicherheitsbremsung der Gesamtanlage ausgelöst wird.
- Verfahren nach einem der Ansprüche 7 bis 11, dadurch gekennzeichnet, dass die hydraulische Steuerung derart ausgelegt wird, dass zu Wartungszwecken beide Zylinder gemeinsam oder jeder Zylinder separat hoch und runter gefahren werden kann.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013010273.1A DE102013010273A1 (de) | 2013-06-18 | 2013-06-18 | Kompensationsseilscheibenanordnung |
| PCT/EP2014/062460 WO2014202487A2 (de) | 2013-06-18 | 2014-06-13 | Kompensationsseilscheibenanordnung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3010845A2 EP3010845A2 (de) | 2016-04-27 |
| EP3010845B1 true EP3010845B1 (de) | 2016-11-16 |
Family
ID=51063408
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14735487.2A Active EP3010845B1 (de) | 2013-06-18 | 2014-06-13 | Kompensationsseilscheibenanordnung |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10118808B2 (de) |
| EP (1) | EP3010845B1 (de) |
| CN (1) | CN105531217B (de) |
| AP (1) | AP2015008913A0 (de) |
| AU (1) | AU2014283427B2 (de) |
| CA (1) | CA2915906C (de) |
| DE (1) | DE102013010273A1 (de) |
| EA (1) | EA030574B1 (de) |
| WO (1) | WO2014202487A2 (de) |
| ZA (1) | ZA201509029B (de) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2933217B1 (de) * | 2014-04-16 | 2017-03-15 | KONE Corporation | Vorrichtung zur Ausgleichung des Gewichts der Hebeseilanordnung einer Aufzug. |
| DE102016123376A1 (de) * | 2016-12-02 | 2018-06-07 | Siemag Tecberg Gmbh | Förderanlage für Endlager |
| CN108488147B (zh) * | 2018-04-11 | 2024-03-08 | 河南大学 | 一种智能式荷载缓和装置 |
| CN109761159A (zh) * | 2019-01-24 | 2019-05-17 | 广州鸿海海洋技术服务有限公司 | 一种绞车补偿装置 |
| US11524872B2 (en) * | 2020-04-22 | 2022-12-13 | Otis Elevator Company | Elevator compensation assembly monitor |
| CN112498627A (zh) * | 2020-11-24 | 2021-03-16 | 武汉第二船舶设计研究所(中国船舶重工集团公司第七一九研究所) | 一种船坞折倒装置 |
| CN114057104B (zh) * | 2022-01-17 | 2022-04-08 | 新乡市起重设备厂有限责任公司 | 一种起重机起吊调节装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1311108A (en) * | 1919-07-22 | Hydraulic strain-equalizer | ||
| US1887306A (en) * | 1929-12-27 | 1932-11-08 | Fred H Huff | Revolving sheave fairlead |
| GB664686A (en) * | 1947-11-29 | 1952-01-09 | Houilleres Bassin Du Nord | Improvements in or relating to hoists |
| GB880311A (en) * | 1959-11-06 | 1961-10-18 | Anglo Amer Corp South Africa | Improvements in lifting, lowering and hauling |
| US3014699A (en) * | 1959-11-09 | 1961-12-26 | Anglo Amer Corp South Africa | Lifting, lowering and hauling |
| DE1208463B (de) * | 1959-11-09 | 1966-01-05 | Anglo Amer Corp South Africa | Selbsttaetige Spannungsausgleichseinrichtung fuer die Foerderseile einer Mehrseilaufzugs-einrichtung fuer Bergwerke |
| US3593508A (en) * | 1968-05-23 | 1971-07-20 | Gen Cable Corp | Apparatus for imparting a predetermined value of twist to a material |
| CN1044998C (zh) * | 1996-09-27 | 1999-09-08 | 中国矿业大学 | 钢丝绳张力自动平衡悬挂装置 |
| FI119235B (fi) * | 2003-11-24 | 2008-09-15 | Kone Corp | Hissi ja menetelmä tasauslaitteen ennalta valitulta kompensointialueelta poikkeamisen havaitsemiseksi |
| CN101279688B (zh) * | 2008-05-15 | 2011-04-06 | 董传德 | 钢丝绳张力平衡油缸位置及提升载荷监测系统 |
-
2013
- 2013-06-18 DE DE102013010273.1A patent/DE102013010273A1/de not_active Withdrawn
-
2014
- 2014-06-13 AU AU2014283427A patent/AU2014283427B2/en not_active Ceased
- 2014-06-13 EP EP14735487.2A patent/EP3010845B1/de active Active
- 2014-06-13 EA EA201600019A patent/EA030574B1/ru not_active IP Right Cessation
- 2014-06-13 CN CN201480034436.0A patent/CN105531217B/zh not_active Expired - Fee Related
- 2014-06-13 US US14/898,577 patent/US10118808B2/en not_active Expired - Fee Related
- 2014-06-13 WO PCT/EP2014/062460 patent/WO2014202487A2/de active Application Filing
- 2014-06-13 CA CA2915906A patent/CA2915906C/en active Active
- 2014-06-13 AP AP2015008913A patent/AP2015008913A0/xx unknown
-
2015
- 2015-12-10 ZA ZA2015/09029A patent/ZA201509029B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| US10118808B2 (en) | 2018-11-06 |
| DE102013010273A1 (de) | 2014-12-18 |
| EP3010845A2 (de) | 2016-04-27 |
| AU2014283427B2 (en) | 2018-10-25 |
| ZA201509029B (en) | 2019-01-30 |
| AU2014283427A1 (en) | 2016-01-28 |
| US20160115002A1 (en) | 2016-04-28 |
| WO2014202487A2 (de) | 2014-12-24 |
| AP2015008913A0 (en) | 2015-12-31 |
| CA2915906A1 (en) | 2014-12-24 |
| CN105531217A (zh) | 2016-04-27 |
| CN105531217B (zh) | 2017-12-22 |
| EA201600019A1 (ru) | 2016-05-31 |
| CA2915906C (en) | 2020-01-21 |
| WO2014202487A3 (de) | 2015-03-19 |
| EA030574B1 (ru) | 2018-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3010845B1 (de) | Kompensationsseilscheibenanordnung | |
| EP1184332B1 (de) | Fahrzeug-Hebebühne | |
| DE102007006316B3 (de) | Vorrichtung und Verfahren zur Seillageüberwachung einer seilbetriebenen Transportanlage und seilbetriebene Transportanlage | |
| EP2698475B1 (de) | Selbstfahrende Baumaschine und Verfahren zum Betreiben einer Baumaschine | |
| DE102015116515A1 (de) | Trommelförderanlage mit Seilüberwachungseinrichtung | |
| DE112006000500T5 (de) | Aufzuganlage | |
| DE112013007076B4 (de) | Aufzugvorrichtung | |
| DE69710827T2 (de) | Verfahren zum Steuern des Betriebs einer Lastkompensationsvorrichtung und Lastkompensationsvorrichtung zur Durchführung dieses Verfahrens | |
| EP3102757A1 (de) | Parkvorrichtung für kraftfahrzeuge | |
| DE102009056547A1 (de) | Vorrichtung zum Längen- und/oder Lastausgleich zwischen mindestens zwei Tragmitteln | |
| EP2014600B1 (de) | Kompensationseinrichtung | |
| EP3375686A1 (de) | Vorrichtung und verfahren zur überwachung einer luftseilbahnanlage | |
| DE202015005760U1 (de) | Vorrichtung, Anordnung und deckengebundenen Röntgenbildgebungsgerät mit einer Überwachung der Längsausdehnung eines Tragseils | |
| DE2725939A1 (de) | Ueberwachungseinrichtung | |
| DE102018010088A1 (de) | Form-/Stanzstation oder Stanzstation in einer Thermoformmaschine und Verfahren zur Kraftkompensation an einer Oberbrücke einer Form-/Stanzstation oder Stanzstation | |
| EP2746525B1 (de) | Verfahren zur Steuerung des Antriebes eines Rolltores und Vorrichtung zur Steuerung des Antriebes eines Rolltores | |
| EP3077320B1 (de) | Aufzugsanlage | |
| DE102011079452A1 (de) | Vorrichtung zur Begrenzung der Schrägstellung eines anstellbaren Rollenträgers | |
| DE202012012284U1 (de) | Strangführung für eine Stranggießanlage | |
| DE102012101287B4 (de) | Aufhängung einer Aufzugskabine | |
| DE2739390A1 (de) | Hebebuehne zum anheben schwerer lasten, insbesondere von fahrzeugen | |
| WO2009089895A1 (de) | Überlastüberwachung von strangführungselementen | |
| DE102016115226A1 (de) | Kompakt-Hubwerkanordnung | |
| DE202014104242U1 (de) | Kettenzug | |
| EP3444213A1 (de) | Hydraulischer aufzug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20160118 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| DAX | Request for extension of the european patent (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20160714 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 845700 Country of ref document: AT Kind code of ref document: T Effective date: 20161215 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014002000 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170217 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170216 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170316 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014002000 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170216 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20170817 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170613 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170630 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170630 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170316 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502014002000 Country of ref document: DE Representative=s name: FORTMANN TEGETHOFF PATENT- UND RECHTSANWAELTE , DE Ref country code: DE Ref legal event code: R082 Ref document number: 502014002000 Country of ref document: DE Representative=s name: FORTMANN TEGETHOFF PATENT- UND RECHTSANWAELTE, DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 845700 Country of ref document: AT Kind code of ref document: T Effective date: 20190613 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190613 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20210621 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502014002000 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230103 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240620 Year of fee payment: 11 |