EP2974970B1 - Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen - Google Patents
Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen Download PDFInfo
- Publication number
- EP2974970B1 EP2974970B1 EP14177578.3A EP14177578A EP2974970B1 EP 2974970 B1 EP2974970 B1 EP 2974970B1 EP 14177578 A EP14177578 A EP 14177578A EP 2974970 B1 EP2974970 B1 EP 2974970B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pushing
- guide
- unit
- slide
- booster
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004806 packaging method and process Methods 0.000 title claims description 20
- 238000000034 method Methods 0.000 claims description 11
- 230000008569 process Effects 0.000 claims description 11
- 230000007704 transition Effects 0.000 claims description 10
- 238000003780 insertion Methods 0.000 description 58
- 230000037431 insertion Effects 0.000 description 58
- 210000002105 tongue Anatomy 0.000 description 38
- 238000006073 displacement reaction Methods 0.000 description 6
- 230000009471 action Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B5/00—Packaging individual articles in containers or receptacles, e.g. bags, sacks, boxes, cartons, cans, jars
- B65B5/06—Packaging groups of articles, the groups being treated as single articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B35/00—Supplying, feeding, arranging or orientating articles to be packaged
- B65B35/30—Arranging and feeding articles in groups
- B65B35/40—Arranging and feeding articles in groups by reciprocating or oscillatory pushers
Definitions
- the present invention relates to a sliding device for filling packaging with blister packs.
- the Packguteinschub can now be realized for example by continuously circulating chains on which the insertion plunger or insertion support tongues are attached.
- a mechanical positive guidance of the insertion plunger or insertion support tongues in groove curves ensures the desired movement sequences of these elements when the chains are circulating.
- a disadvantage of this variant is that a plurality of insertion tappets and insertion support tongues must be in circulation, each formed as a format part and thus costly.
- the required groove curves in the deflections are susceptible to wear, whereby a limited life of the groove curves is given. Since the guide of the insertion plunger and insertion support tongues is exclusively in Nutkurven, also the Voreinschubtiefe is limited.
- Such a device is for example off EP 1 389 166 A1 known.
- a slide-in unit with a plurality of juxtaposed slide-in tappets and a slide-in support device with a same plurality of likewise juxtaposed slide-in support tongues are arranged on a slide.
- This slide is moved via a first servo motor in a synchronized accompanying movement for continuous Packguttransport in the x direction.
- the insertion plunger are hereby moved in the y direction via a second servomotor.
- the slide-in support tongues are moved in the y-direction by means of a third and fourth servomotor and also adjusted in height in the z-direction. After the insertion movement, the insertion plunger and the insertion support tongues are retracted again, and the carriage is brought back into the starting position in a rapid movement in the x-direction counter to the direction of transport of the packaged goods transport.
- the disadvantage of such a solution is especially the complex and costly design.
- the DE 10 200 010 896 A1 discloses a device for inserting products in packaging containers.
- the present invention has for its object to provide a sliding device for filling of packaging with blister packs, which has a high performance and a safe function and also a robust design.
- the sliding device for filling packaging with blister packs comprises a slide-in unit for inserting the blister packs into the packaging means.
- the plug-in unit has a first carrier plate on which at least one slide plunger is attached.
- the sliding device further comprises a drawer support unit for supporting the drawer unit during the drawer operation, the drawer support unit having a second support plate to which at least one drawer support tongue is attached.
- the sliding device for filling packaging with blister packs comprises a carriage, on which a first guide curve and a second guide curve are formed, wherein in the first guide curve, a first guide element, which is connected to the insertion unit, slidably mounted, and wherein in the second guide curve, a second guide member which is connected to the insertion support unit, is slidably mounted.
- a first drive unit For moving the carriage and thus the insertion unit and the insertion support unit in a y-direction, a first drive unit is provided.
- a second drive unit For moving the slide-in unit and the slide-in support unit in an x-direction, which is perpendicular to the y-direction, relative to the slide, a second drive unit is provided, wherein when moving the slide-in unit and the slide support unit in the x-direction, the first guide member in the first guide curve and the second guide element is guided in the second guide curve.
- the insert unit and the rack support unit are preferably reciprocable between an initial area and an end area in the x direction.
- the slide can advantageously be moved back and forth between a rear and a front position in the y-direction.
- the second guide element is connected to a first holder of the second carrier plate, wherein the first holder is slidably mounted in a linear guide in the y-direction and is rotatably connected to the second carrier plate is particularly advantageous.
- the displaceably mounted in the linear guide first holder a stable guidance of the second carrier plate is achieved in the y direction.
- the first guide curve is preferably substantially linear and the second guide curve preferably has a substantially linear section running in the x-direction and a portion extending obliquely or curved to the linear portion.
- the obliquely or curved section of the second guide curve essentially extends in a direction away from the at least one slide plunger of the plug-in unit and the at least one plug-in support tongue of the plug-in support unit, so that when the second guide element moves along the obliquely or curved section the second guide curve, the at least one insertion support tongue is moved relative to the at least one slide plunger in the y direction. This allows the drawer support tongue to be pulled out of the carton while the slide plungers restrain the blister pack stack in the carton.
- a third guide curve is formed, which is movable together with the plug-in support unit in the x-direction and in which a third guide element is slidably mounted in the y-direction, wherein the third guide element is rigidly connected via a connecting element with the second support plate of the plug-in support unit.
- the third guide curve additionally serves for the uniform movement of the slide-in support unit in the y-direction.
- the third guide curve comprises two mutually offset linear regions and a curved transition region, so that the second carrier plate undergoes a pivoting movement substantially in the z-direction, which is perpendicular to the x-direction and the y-direction, when the third guide member passes through the curved transition region. This ensures that the at least one drawer support tongue lowers during the insertion process from the top down on the Blisterverpackungsstapel to support it during the insertion process.
- the first, the second and the third guide curve are preferably formed as groove curves and the first, the second and the third guide element preferably as cam rollers.
- the at least one slide plunger and the at least one plug-in support tongue in each case in operative connection with an individually controllable pneumatic cylinder, so that in case of failure during the insertion process, the sliding operation of the at least one slide plunger and the at least one insertion support tongue can be selectively terminated.
- the carriage is preferably attached to a first belt assembly and the first belt assembly is driven by the first drive unit.
- the first carrier plate is displaceably mounted in the y-direction on a guide rod and is connected via the guide rod to a second belt arrangement which is driven by the second drive unit.
- the first carrier plate can thus be moved in a simple manner simultaneously in the x-direction and in the y-direction.
- the second guide element is connected to a first holder of the second carrier plate, wherein the first holder is slidably mounted in a linear guide in the y-direction and is rotatably connected to the second carrier plate, and the third guide curve and the linear guide are attached to the second belt assembly ,
- the second carrier plate can be moved in a simple manner simultaneously in the x-direction and in the y-direction.
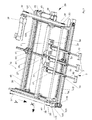
- Fig. 1 to 3 show the basic structure of an embodiment of the sliding device 1 according to the invention, which is used as part of a cartoning.
- the pusher device 1 is used to insert on a first transport device 12 in an x-direction, preferably in the form of a stack, blister packs 13 in packaging means 16, preferably folding cartons, which are also transported by a second transport device 14 in the x-direction.
- the first and second transport devices 12, 14 are continuously moved at the same speed, and the insertion preferably also takes place in continuous operation.
- the transport devices 12, 14 may also be designed as a single transport device.
- a plug-in unit 3 for inserting the blister packs 13 into the packaging means 16 and a plug-in support unit 5 for supporting the plug-in unit 3 during the insertion process are shown together.
- Fig. 2 For clarity, only the plug-in unit 3 is shown with associated elements, while in Fig. 3 for better clarity, only the plug-in support unit 3 is shown with associated elements.
- the slide-in unit 3 has at least one slide plunger 7, in the present exemplary embodiment there are three slide plungers 7.
- the slide plungers 7 are provided for the lateral displacement of the blister packs 13 in the y-direction.
- the slide-in support unit 5 has at least one slide-in support tongue 9, wherein the slide device 1 in the present exemplary embodiment has three slide-in support tongues 9 has.
- the slide support tongues 9 are arranged offset with respect to the slide plunger 7 upwards so that they can be lowered from above onto the stacks of blister packs 13 in order to keep them stable during the sliding operation and to compress them easily.
- the number of push rods 7 and slide support tongues 9 can vary as desired, however, the number of slide plunger 7 and the number of slide support tongues 9 should match to ensure an optimal insertion process of the blister packs 13.
- the plug-in unit 3 and the plug-in support unit 5 are operatively connected to a carriage 11.
- the carriage 11 is reciprocable between a rear and a front position in the y-direction and is moved via a first belt assembly 29 by a first drive unit 37.
- the plug-in unit 3 and the plug-in support unit 5 are likewise moved, as will be described in more detail below.
- the insertion unit 3 and the insertion support unit 5 are also reciprocated along the carriage 11 between an initial region and an end region in the x-direction and are moved in this direction jointly via a second belt assembly 43 by a second drive unit 45.
- the first and the second drive units 37, 45 as well as the first and the second belt arrangement 29, 43 will be discussed in more detail below.
- the plug-in unit 3 ( Fig. 2 ) has a first carrier plate 15, on which the slide plungers 7 are arranged. It can also be provided pneumatic cylinder 17, which are individually controlled. The pneumatic cylinders 17 are in operative connection with the respective push rods 7. The slide plungers 7 are essentially connected via a connecting rod 19 with the respective pneumatic cylinder 17. Furthermore, valves 21 for controlling the pneumatic cylinders 17 may be arranged on the first carrier plate 15. In the event of an overload during the insertion process, the valve 21 can be actuated via a suitable mechanism or a suitable control, so that the pneumatic cylinder 17 is reversed in the other direction and the sliding plunger 7 is disengaged.
- a pneumatic cylinder 17 can be purposefully put out of action, for example, when a stack of blister packs 13 targeted for failure or due to a lack of packaging 16 targeted to be inserted. It is also conceivable in simpler embodiments to provide no pneumatic cylinder 17, but to connect the slide plunger 7 fixed to the first support plate 15.
- the first carrier plate 15 is rigidly connected to a first guide element 25 (preferably a cam roller) which is displaceably mounted in a first guide curve 27.
- the first guide curve 27 extends substantially linearly in the x direction and is formed in a lower region of the carriage 11.
- the first guide member 25 guides the first support plate 15 along the first guide curve 27.
- the first guide member 25 is moved along the first guide curve 27 in the x direction when the second drive unit 45 is operated.
- the carriage 11 is fixedly attached to a first belt assembly 29.
- the first belt assembly 29 consists essentially of two belts 30, 31 to which opposite ends of the carriage 11 are attached.
- the belt 30 is driven by a pulley 32, which in turn is driven by the first drive unit 37, preferably a servomotor.
- the belt 30 drives the pulley 33 disposed at one end of a shaft 34.
- the shaft 34 transmits the rotation of the pulley 33 to the pulley 35 disposed at an opposite end of the shaft 34.
- the pulley 35 in turn drives the belt 31.
- the two belts 30, 31 of the first belt assembly 29 are preferably formed as a toothed belt.
- the carriage 11 is guided in two opposite guide rails 39 in the y direction.
- the guide rails 39 serve to stabilize the carriage 11 during the displacement in the y direction.
- the carriage 11 is fixedly connected to a linear guide element 40 which is guided in or on the guide rails 39.
- the opposite guide rails 39 are disposed in an area near the belts 30, 31.
- the carriage 11 is connected via a connecting element 38 with the belt 30, 31, which is also firmly connected to the linear guide element 40. It is conceivable to dispense with the additional guide rails 39.
- the first support plate 15 is additionally slidably mounted on a guide rod 41 in the y-direction.
- the guide rod 41 may have a guide rail on which the support plate 15 runs.
- the guide rod 41 is in turn fixedly connected to opposite belts 109, 117 of a second belt assembly 43 via connecting elements 53.
- the second belt arrangement 43 is driven by a second drive unit 45 and displaces or moves the first carrier plate 15 in the x-direction.
- the second belt assembly 43 will be described below with reference to FIG Fig. 3 discussed in more detail.
- the guide rod 41 similar to the carriage 11, slidably mounted in two opposite guide rails 49.
- the guide rails 49 are provided to stabilize the guide rod 41 and thus also the first support plate 15 when moving in the x direction.
- the two opposite guide rails 49 are each arranged in an area near the second belt assembly 43 extending in the x-direction.
- the guide rod 41 is connected at both ends with a linear guide member 51.
- the linear guide element 51 is guided in or on the guide rails 49 in the x direction.
- the first and second drive units 37, 45 are preferably designed as servomotors.
- At least one individually controllable pneumatic cylinder 71 is arranged, which is in operative connection with the at least one insertion support tongue 9 and is connected via a connecting rod 73 with the insertion support tongue 9.
- the slide-in support tongue 9 can be fastened directly to the connecting rod 73 or, as shown, via a height-adjustable connecting element 75.
- the slide-in support tongue 9 is preferably designed as a flat plate extending primarily in the y-direction so as to be placed onto the blister packs 13 from above to be lowered.
- the connecting rod 73, the connecting element 75 and the insertion support tongue 9 essentially form a Z-shape, wherein preferably the connecting element 75 protrudes at a 90 ° angle from the connecting rod 73 and the insertion support tongue 9 in turn preferably at a 90 ° angle from the connecting element 75 protrudes.
- the insertion support tongue 9 is thus lower than the connecting rod 73rd
- valves 74 can also be provided here, which are likewise arranged on the second carrier plate 69 and serve for the purpose of controlling the pneumatic cylinders 71 for the same reasons.
- the second carrier plate 69 is guided in the second guide cam 79 via a second guide element 77, preferably a cam roller.
- a third guide element 81 which is guided in a third guide curve 83, is likewise connected to the second carrier plate 69.
- the third guide element 81 is preferably designed as a cam roller.
- the guide elements 77, 81 are formed as pins or as a carriage.
- the second and third guide curves 79, 83 are preferably designed as groove curves. Alternatives such as linear guides or other elements suitable for guidance are conceivable.
- the second guide member 77 is fixedly connected to a first holder 85 which is slidably mounted in a linear guide 87 in the y-direction.
- the first holder 85 has substantially an inverted U-shape and is rotatably connected via a connecting pin 87 with the second support plate 69.
- the connecting pin 87 preferably extends through two legs 88 of the U-shaped first holder 85 and is rotatably mounted on the second support plate 69. It is also conceivable that two connecting pins 87 are provided, each penetrate a leg 88 of the U-shaped first holder 85 and are rotatably connected to the second support plate 69.
- the first holder 85 is guided in a linear guide 89 which extends in the y-direction and which is connected to the third guide curve 83.
- the linear guide 89 may be formed, for example, as a groove curve, in which the first holder 85 by a suitable guide element (not shown) is slidably mounted.
- a suitable guide element not shown
- Various types of guide elements are conceivable here.
- the second guide element 77 is guided in the second guide curve 79 essentially in the x direction.
- the second guide cam 79 is fixedly connected to the carriage 11 or preferably as an integral part with the carriage 11 and thus with the first Guide curve 27 is formed.
- a displacement of the carriage 11 in the y-direction simultaneously causes an identical displacement of the first and the second guide curve 27, 79 in the y-direction. So that the second guide curve 79 can be adapted to different requirements, a length adjustability of the second guide curve 79, manually or by motor, in the x direction is conceivable.
- the second guide curve 79 basically comprises a linear x-directional portion 91 and a slanting or curved portion 91 extending to the linear portion 91.
- the linearly extending portion 91 is disposed near the initial portion of the movement of the drawer supporting unit 5, and the inclined or curved portion 93 is disposed near the end portion of the movement of the drawer supporting unit 5.
- the inclined or curved portion 93 extends obliquely or curved rearward, i.
- the third guide member 81 When the carriage 11 is moved in the y-direction or when the second guide member 77 is moved by the inclined or curved portion 93, the third guide member 81 slidably supported in the third guide cam 83 is moved in the y-direction.
- the third guide element 81 is rotatably connected to a connecting element 95, which in turn is rigidly connected to the second support plate 69.
- the connecting element 95 is preferably designed as a Z-shaped connecting element. But it is also conceivable that the connecting element 95 has a different angular shape or that the connecting element 95 is formed as an oblique connection between the third guide member 79 and the second support plate 69.
- the third guide curve 83 in which the third guide element 79 is displaceably mounted, has two mutually offset linear regions 97, 99 and therebetween a curved transition region 101.
- the lower linear region 99 is in a rear region and the higher linear region 97 is in a front region of the pusher 1, viewed in the y direction, arranged.
- the curved transition region 101 has an S-shaped curvature, so that the third guide element 79 can be moved fluidly in the curved transition region 101.
- the third guide curve 83 is fixedly connected to the linear guide 89. It is also conceivable that the linear guide 89 and the third guide curve 83 are formed integrally with each other. Both the third guide curve 83 and the linear guide 89 extend in the y-direction and are movable together with the slide-in support unit 5 in the x-direction. It is conceivable that the third guide curve 83, and thus also the linear guide 89, are longitudinally adjustable to adapt to different conditions in the y-direction. This can be done manually or via an adjusting motor.
- the linear guide 89 is attached at its front and rear ends to two guide elements 103.
- the guide elements 103 are each guided on a linear guide rail 105 and in the x-direction back and forth.
- a connecting member 106 is arranged, which is attached to the second belt assembly 43 and in the x-direction back and forth.
- the second belt assembly 43 shifts the plug-in unit 3 and the plug-in support unit 5 in the x-direction.
- the second belt assembly 43 includes a plurality of belts and pulleys driven by the second drive unit 45, which will be discussed in more detail below.
- the second drive unit 45 first drives the pulley 107, which in turn drives the belt 109.
- the belt 109 is in turn connected to a pulley 111, which in turn is connected via a shaft 113 to the pulley 115 and thus transmits the force of the second drive unit 45 to the belt 117.
- the pulley 111 and the pulley 115 are disposed at opposite ends of the shaft 113. In this way, a belt arrangement results, in which the belts 109, 117 are driven in the same direction by the second drive unit 45. In this way, the plug-in unit 3, which is attached to the belt 109, 117, safely and balanced in the x direction to be moved.
- pulley wheels 123 are additionally arranged at opposite ends of the shaft 113, which transmit the movement of the second drive unit 45 into an upper region of the belt arrangement 43.
- the pulleys 123 transmit the movement of the second drive unit 45 to belts 125, 145, which in turn drive the pulleys 127, 135.
- the pulleys 127, 135 are disposed on opposite ends of a shaft 129, on which also the pulleys 133 and 135 are arranged.
- the pulleys 131, 133 eventually drive belts 137, 141. All belts are preferably designed as a toothed belt.
- each of the belts 137 and 141 is attached one of the connecting members 106 which are connected to the drawer supporting unit 5.
- the movement of the belts 137, 141 thus results in the movement of the plug-in support unit 5 in the x-direction.
- the belt arrangement 43 thus ensures that the slide-in unit 3 and the slide-in support unit 5 are simultaneously moved in the x-direction by moving only one drive unit 45.
- the sliding device 1 further comprises two housing walls 149, 150, which are interconnected by at least four connecting bars 151, 152, 153, 154.
- the two guide rails 39 are attached to the two inner sides of the housing walls 149, 150.
- the shaft 34 is rotatably supported at its opposite ends in the two housing walls 149, 150.
- the shaft 113 is rotatably supported in the connecting bars 151 and 153, and the shaft 129 is rotatably supported in the connecting bars 152 and 154.
- the plug-in unit 3 and the plug-in support unit 5 are reciprocable between an initial area and an end area in the x-direction.
- the starting area is in the Fig. 4 to 8
- the carriage 11 is reciprocable between a rear and a forward position in the y-direction, the forward position being the position in which the slide plungers 7 and 10 are in the right-hand region of the pusher 1 and the end region in the left-hand region of the pusher device 1 the Insertion support tabs 9 have inserted the blister packs in the packaging.
- Fig. 4 the carriage 11 is in a y-direction in a rear position and the insertion unit 3 and the insertion support unit 5 in the x-direction in the initial area.
- the slide plungers 7 and the plug-in support tongues 9 are retracted behind the first transport device 12.
- the slide-in support tongues 9 are also in a folded-up position and the second support plate 69 in an inclined or tilted position, because the third guide member 81 is in the lower linear portion 99 of the third guide curve 83.
- Fig. 5 is like in Fig. 1 the phase in which the insertion process has already started.
- Fig. 6 the insertion process is completed.
- the carriage 11 is located in the y direction in its front position, and the insertion unit 3 and the insertion support unit 5 have been moved by the second drive unit 45 in the x direction to a position between the initial position and the end position.
- the second drive unit 45 in the x direction to a position between the initial position and the end position.
- the second guide member 77 passes into the inclined or curved portion 93 of the second guide cam 79 and causes a relative movement of the insertion support unit 5 in the y direction with respect to the insertion unit 3 (FIGS. Fig. 7 ).
- the insertion support tongues 9 are pulled out of the packaging means 16, while the push rods 7 stop in front of the packaging means 16 in order to prevent the stacks of blister packages 13 from being pulled out of the packaging means 16 again during withdrawal of the insertion support tongues 9 become.
- the extraction operation of the insertion support tongues 9 is completed from the packaging. Subsequently, the carriage 11 is moved backwards in the y-direction, as a result of which both the slide-in unit 3 and the slide-in support unit 5 also move further backwards (FIG. Fig. 8 ).
- the third guide member 81 passes through the curved transition region 101 in the direction of the lower linear portion 99, with the result that the second support plate 69 is tilted and the insertion support tongues 9 are slightly inclined upward. The tilting of the second support plate 69 is thus effected exclusively by the height difference of the two mutually offset in height linear regions 97, 99.
- the insertion unit 3 and the insertion support unit 5 are moved to the initial area by the second drive unit 45 in the x-direction moved back ( Fig. 4 ).
- the second guide member 77 leaves the oblique or curved portion 93 in this displacement.
- the carriage 11 is moved further back in the y-direction.
- the third guide member 81 remains in the lower linear region 99.
Description
- Die vorliegende Erfindung betrifft eine Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen.
- Bei Kartoniermaschinen werden einzelne Blisterverpackungen oder vorzugsweise Stapel von Blisterverpackungen von einer ersten Transportvorrichtung in Faltschachteln eingeschoben, die auf einer zweiten Transportvorrichtung transportiert werden, die parallel zur ersten Transportvorrichtung verläuft. Hierzu werden Einschubstößel verwendet, die für die seitliche Schiebebewegung zuständig sind. In der Regel werden die Einschubstößel bei der Einschubbewegung von Einschubunterstützungszungen unterstützt, die von während des Einschubvorgangs von oben leicht auf den Stapel von Blisterverpackungen drücken und die Einschubbewegung mitmachen.
- Der Packguteinschub kann nun beispielsweise durch kontinuierlich umlaufende Ketten realisiert sein, an denen die Einschubstößel bzw. Einschubunterstützungszungen befestigt sind. Eine mechanische Zwangsführung der Einschubstößel bzw. Einschubunterstützungszungen in Nutkurven sorgt für die gewünschten Bewegungsabläufe dieser Elemente bei Umlauf der Ketten. Nachteilig an dieser Variante ist, dass eine Vielzahl von Einschubstößeln und Einschubunterstützungszungen im Umlauf sein muss, die jeweils als Formatteil ausgebildet und somit kostenintensiv sind. Des Weiteren sind die benötigten Nutkurven in den Umlenkungen verschleißanfällig, wodurch eine begrenzte Lebensdauer der Nutkurven gegeben ist. Da die Führung der Einschubstößel und Einschubunterstützungszungen ausschließlich in Nutkurven erfolgt, ist außerdem die Voreinschubtiefe limitiert.
- Um diese Nachteile zu vermeiden, wurden Einschubkonzepte mit Servomotoren entwickelt. Eine solche Vorrichtung ist beispielsweise aus
EP 1 389 166 A1 bekannt. Eine Einschubeinheit mit einer Mehrzahl von nebeneinander angeordneten Einschubstößeln und eine Einschubunterstützungsvorrichtung mit einer gleichen Mehrzahl von ebenso nebeneinander angeordneten Einschubunterstützungszungen sind dabei auf einem Schlitten angeordnet. Dieser Schlitten wird über einen ersten Servomotor in einer synchronisierten Begleitbewegung zum kontinuierlichen Packguttransport in x-Richtung bewegt. Während dieser Parallelbewegung in x-Richtung werden gleichzeitig mehrere Stapel von Blisterverpackungen in die Packmittel in y-Richtung eingeschoben. Die Einschubstößel werden hierbei über einen zweiten Servomotor in y-Richtung bewegt. Die Einschubunterstützungszungen werden dabei mittels eines dritten und vierten Servomotors in y-Richtung bewegt und zudem in z-Richtung höhenverstellt. Nach der Einschubbewegung werden die Einschubstößel und die Einschubunterstützungszungen wieder zurückgezogen, und der Schlitten wird in einer schnellen Bewegung in x-Richtung entgegen der Laufrichtung des Packguttransports wieder in die Startposition gebracht. Nachteilig an einer solchen Lösung ist vor allem die aufwändige und kostenintensive Ausgestaltung. - Die
DE 10 200 010896 A1 offenbart eine Vorrichtung zum Einschieben von Produkten in Verpackungsbehältnisse. - Der vorliegenden Erfindung liegt die Aufgabe zugrunde, eine Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen zu schaffen, die bei hoher Leistung eine sichere Funktion und zudem eine robuste Bauweise aufweist.
- Diese Aufgabe wird durch die Merkmale des Anspruchs 1 gelöst.
- Erfindungsgemäß umfasst die Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen eine Einschubeinheit zum Einschieben der Blisterverpackungen in die Packmittel. Die Einschubeinheit weist eine erste Trägerplatte auf, an der mindestens ein Schiebestößel befestigt ist. Die Schiebevorrichtung umfasst weiterhin eine Einschubunterstützungseinheit zum Unterstützen der Einschubeinheit während des Einschubvorgangs, wobei die Einschubunterstützungseinheit eine zweite Trägerplatte aufweist, an der mindestens eine Einschubunterstützungszunge befestigt ist. Des Weiteren umfasst die Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen einen Schlitten, an dem eine erste Führungskurve und eine zweite Führungskurve ausgebildet sind, wobei in der ersten Führungskurve ein erstes Führungselement, das mit der Einschubeinheit verbunden ist, verschiebbar gelagert ist, und wobei in der zweiten Führungskurve ein zweites Führungselement, das mit der Einschubunterstützungseinheit verbunden ist, verschiebbar gelagert ist. Zum Bewegen des Schlittens und somit der Einschubeinheit und der Einschubunterstützungseinheit in einer y-Richtung ist eine erste Antriebseinheit vorgesehen. Zum Bewegen der Einschubeinheit und der Einschubunterstützungseinheit in einer x-Richtung, die senkrecht zu der y-Richtung ist, relativ zu dem Schlitten ist eine zweite Antriebseinheit vorgesehen, wobei beim Bewegen der Einschubeinheit und der Einschubunterstützungseinheit in der x-Richtung das erste Führungselement in der ersten Führungskurve und das zweite Führungselement in der zweiten Führungskurve geführt ist.
- Mit dieser Ausgestaltung wird durch eine robuste Bauweise eine sichere Funktion bei hoher Leistung und langer Lebensdauer erreicht.
- Damit die Blisterverpackungen während eines kontinuierlichen Vorschubs der Blisterverpackungen in eine Faltschachtel eingeschoben werden können, sind die Einschubeinheit und die Einschubunterstützungseinheit vorzugsweise zwischen einem Anfangsbereich und einem Endbereich in x-Richtung hin- und herbewegbar.
- Damit die Einschubeinheit und die Einschubunterstützungseinheit relativ zu den einzuschiebenden Blisterverpackungen bewegbar sind, ist der Schlitten vorteilhafterweise zwischen einer hinteren und einer vorderen Position in y-Richtung hin- und herbewegbar.
- Besonders vorteilhaft ist es, wenn das zweite Führungselement mit einem ersten Halter der zweiten Trägerplatte verbunden ist, wobei der erste Halter in einer Linearführung in y-Richtung verschiebbar gelagert ist und drehbar mit der zweiten Trägerplatte verbunden ist. Durch den in der Linearführung verschiebbar gelagerten ersten Halter wird eine stabile Führung der zweiten Trägerplatte in y-Richtung erreicht.
- Damit die durch die zweite Antriebseinheit gemeinsam bewegte Einschubeinheit und Einschubunterstützungseinheit in dem Endbereich unabhängig in x-Richtung zueinander bewegt werden können, ist die erste Führungskurve vorzugsweise im Wesentlichen linear ausgebildet und die zweite Führungskurve weist vorzugsweise einen im Wesentlichen linearen, in x-Richtung verlaufenden Abschnitt und einen zu dem linearen Abschnitt schräg oder gekrümmt verlaufenden Abschnitt auf.
- Besonders vorteilhaft ist es, wenn der schräg oder gekrümmt verlaufende Abschnitt der zweiten Führungskurve im Wesentlichen in einer dem mindestens einen Schiebestößel der Einschubeinheit und der mindestens einen Einschubunterstützungszunge der Einschubunterstützungseinheit abgewandten Richtung verläuft, so dass bei Bewegung des zweiten Führungselements entlang dem schräg oder gekrümmt verlaufenden Abschnitt der zweiten Führungskurve die mindestens eine Einschubunterstützungszunge relativ zu dem mindestens einen Schiebestößel in y-Richtung bewegt wird. Dadurch kann die Einschubunterstützungszunge aus der Faltschachtel herausgezogen werden, während die Schiebestößel den Blisterverpackungsstapel in der Faltschachtel zurückhalten.
- Vorzugsweise ist eine dritte Führungskurve ausgebildet, die zusammen mit der Einschubunterstützungseinheit in x-Richtung bewegbar ist und in der ein drittes Führungselement in y-Richtung verschiebbar gelagert ist, wobei das dritte Führungselement über ein Verbindungselement mit der zweiten Trägerplatte der Einschubunterstützungseinheit starr verbunden ist. Die dritte Führungskurve dient zusätzlich der gleichmäßigen Bewegung der Einschubunterstützungseinheit in y-Richtung.
- Besonders vorteilhaft ist es, wenn die dritte Führungskurve zwei zueinander höhenversetzte lineare Bereiche und einen gekrümmten Übergangsbereich umfasst, so dass die zweite Trägerplatte eine Schwenkbewegung im Wesentlichen in z-Richtung, die senkrecht zu der x-Richtung und der y-Richtung ist, erfährt, wenn das dritte Führungselement den gekrümmten Übergangsbereich durchläuft. Dadurch wird gewährleistet, dass die mindestens eine Einschubunterstützungszunge sich beim Einschubvorgang von oben herab auf den Blisterverpackungsstapel absenkt, um ihn während des Einschubvorgangs zu stützen.
- Um eine sichere Führung des ersten, des zweiten und des dritten Führungselements zu gewährleisten, sind die erste, die zweite und die dritte Führungskurve vorzugsweise als Nutkurven ausgebildet und das erste, das zweite und das dritte Führungselement vorzugsweise als Kurvenrollen.
- Vorteilhafterweise stehen der mindestens eine Schiebestößel und die mindestens eine Einschubunterstützungszunge jeweils mit einem individuell ansteuerbaren Pneumatikzylinder in Wirkverbindung, so dass bei einer Störung während des Einschubvorgangs der Schiebevorgang des mindestens einen Schiebestößels und der mindestens einen Einschubunterstützungszunge gezielt abgebrochen werden kann.
- Um den Schlitten gleichmäßig in der y-Richtung zu bewegen, ist der Schlitten vorzugsweise an einer ersten Riemenanordnung befestigt und die erste Riemenanordnung ist von der ersten Antriebseinheit angetrieben.
- Besonders vorteilhaft ist es, dass die erste Trägerplatte in y-Richtung verschiebbar an einer Führungsstange gelagert ist und über die Führungsstange mit einer zweiten Riemenanordnung verbunden ist, die von der zweiten Antriebseinheit angetrieben ist. Die erste Trägerplatte kann somit auf einfache Weise gleichzeitig in x-Richtung und in y-Richtung verschoben werden.
- Vorteilhafterweise ist das zweite Führungselement mit einem ersten Halter der zweiten Trägerplatte verbunden, wobei der erste Halter in einer Linearführung in y-Richtung verschiebbar gelagert ist und drehbar mit der zweiten Trägerplatte verbunden ist, und die dritte Führungskurve und die Linearführung sind an der zweiten Riemenanordnung befestigt. Dadurch kann auch die zweite Trägerplatte auf einfache Weise gleichzeitig in x-Richtung und in y-Richtung verschoben werden.
- Weitere Merkmale und Vorteile der vorliegenden Erfindung ergeben sich aus der nachfolgenden Beschreibung unter Bezugnahme auf die Zeichnungen.
- Fig. 1
- ist eine Perspektivansicht einer Ausführungsform der erfindungsgemäßen Schiebevorrichtung mit der Einschubeinheit mit Schiebestößeln und der Einschubunterstützungseinheit mit Einschubunterstützungszungen in einer Position während des Einschubvorgangs;
- Fig. 2
- ist eine Perspektivansicht der Einschubeinheit aus
Fig. 1 mit einer teilweise freigelegten ersten Führungskurve; - Fig. 3
- ist eine Perspektivansicht der Einschubunterstützungseinheit aus
Fig. 1 mit der zweiten und der dritten Führungskurve; - Fig. 4
- ist eine Draufsicht auf die Schiebevorrichtung aus
Fig. 1 , wobei die Einschubeinheit und die Einschubunterstützungseinheit sich in x-Richtung im Anfangsbereich befinden und sich die Einschubeinheit und die Einschubunterstützungseinheit in einer hinteren zurückgezogenen Position befinden; - Fig. 5
- ist eine Draufsicht auf die Schiebevorrichtung aus
Fig. 4 in der Position der Einschubeinheit und der Einschubunterstützungseinheit gemäßFig. 1 ; - Fig. 6
- ist eine Draufsicht auf die Schiebevorrichtung aus
Fig. 5 , wobei sich die Einschubeinheit und die Einschubunterstützungseinheit in einer vorderen vorgeschobenen Position befinden; - Fig. 7
- ist eine Draufsicht auf die Schiebevorrichtung aus
Fig. 6 , wobei die Einschubeinheit und die Einschubunterstützungseinheit in x-Richtung weiter in Richtung des Endbereichs bewegt wurden; und - Fig. 8
- ist eine Draufsicht auf die Schiebevorrichtung aus
Fig. 7 , wobei sich der Schlitten zudem in y-Richtung in einer teilweise zurückgefahrenen Position befindet. -
Fig. 1 bis 3 zeigen den grundsätzlichen Aufbau einer Ausführungsform der erfindungsgemäßen Schiebevorrichtung 1, die als Teil einer Kartoniervorrichtung verwendet wird. Die Schiebevorrichtung 1 dient dazu, auf einer ersten Transportvorrichtung 12 in einer x-Richtung vorzugsweise in Stapelform herantransportierte Blisterverpackungen 13 in Packmittel 16, vorzugsweise Faltschachteln, einzuschieben, die von einer zweiten Transportvorrichtung 14 ebenfalls in x-Richtung herantransportiert werden. Vorzugsweise sind die erste und zweite Transportvorrichtung 12, 14 kontinuierlich mit derselben Geschwindigkeit bewegt, und das Einschieben erfolgt vorzugsweise ebenfalls im kontinuierlichen Betrieb. Die Transportvorrichtungen 12, 14 können auch als eine einzige Transportvorrichtung ausgebildet sein. - In
Fig. 1 sind eine Einschubeinheit 3 zum Einschieben der Blisterverpackungen 13 in die Packmittel 16 und eine Einschubunterstützungseinheit 5 zum Unterstützen der Einschubeinheit 3 während des Einschubvorgangs gemeinsam dargestellt. InFig. 2 ist zur besseren Übersichtlichkeit lediglich die Einschubeinheit 3 mit zugehörigen Elementen dargestellt, während inFig. 3 zur besseren Übersichtlichkeit lediglich die Einschubunterstützungseinheit 3 mit zugehörigen Elementen dargestellt ist. - Die Einschubeinheit 3 weist mindestens einen Schiebestößel 7 auf, im vorliegenden Ausführungsbeispiel sind es drei Schiebestößel 7. Die Schiebestößel 7 sind zum seitlichen Verschieben der Blisterverpackungen 13 in y-Richtung vorgesehen. Die Einschubunterstützungseinheit 5 weist mindestens eine Einschubunterstützungszunge 9 auf, wobei die Schiebevorrichtung 1 im vorliegenden Ausführungsbeispiel drei Einschubunterstützungszungen 9 aufweist. Die Einschubunterstützungszungen 9 sind bezüglich der Schiebestößel 7 versetzt nach oben angeordnet, so dass sie von oben auf die Stapel von Blisterverpackungen 13 abgesenkt werden können, um diese während des Schiebevorgangs stabil zu halten und leicht zusammenzudrücken. Die Anzahl an Schiebestößeln 7 und an Einschubunterstützungszungen 9 kann beliebig variieren, jedoch sollte die Anzahl der Schiebestößel 7 und die Anzahl der Einschubunterstützungszungen 9 übereinstimmen, um einen optimalen Einschubvorgang der Blisterverpackungen 13 zu gewährleisten.
- Die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 sind wirkend mit einem Schlitten 11 verbunden. Der Schlitten 11 ist zwischen einer hinteren und einer vorderen Position in y-Richtung hin- und herbewegbar und wird über eine erste Riemenanordnung 29 von einer ersten Antriebseinheit 37 bewegt. Sobald der Schlitten 11 sich bewegt, werden die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 gleichermaßen mitbewegt, wie weiter unten noch näher beschrieben wird.
- Die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 sind außerdem entlang des Schlittens 11 zwischen einem Anfangsbereich und einem Endbereich in x-Richtung hin- und herbewegbar und werden in dieser Richtung gemeinsam über eine zweite Riemenanordnung 43 von einer zweiten Antriebseinheit 45 bewegt.
- Auf die erste und die zweite Antriebseinheit 37, 45 sowie auf die erste und die zweite Riemenanordnung 29, 43 wird weiter unten näher eingegangen.
- Die Einschubeinheit 3 (
Fig. 2 ) weist eine erste Trägerplatte 15 auf, auf der die Schiebestößel 7 angeordnet sind. Es können auch Pneumatikzylinder 17 vorgesehen sein, die individuell ansteuerbar sind. Die Pneumatikzylinder 17 stehen mit den jeweiligen Schiebestößeln 7 in Wirkverbindung. Die Schiebestößel 7 sind im Wesentlichen über eine Verbindungsstange 19 mit dem jeweiligen Pneumatikzylinder 17 verbunden. Weiterhin können auf der ersten Trägerplatte 15 Ventile 21 zur Ansteuerung der Pneumatikzylinder 17 angeordnet sein. Bei einer Überlast während des Einschubvorgangs kann das Ventil 21 über einen geeigneten Mechanismus oder eine geeignete Steuerung betätigt werden, so dass eine Umsteuerung des Pneumatikzylinders 17 in die andere Richtung erfolgt und der Schiebestößel 7 außer Eingriff gebracht wird. Auch aus anderen Gründen kann ein Pneumatikzylinder 17 gezielt außer Betrieb gesetzt werden, beispielsweise wenn ein Stapel an Blisterverpackungen 13 wegen Fehlerhaftigkeit oder wegen eines fehlenden Packmittels 16 gezielt nicht eingeschoben werden soll. Es ist in einfacheren Ausführungsformen auch denkbar, keine Pneumatikzylinder 17 vorzusehen, sondern die Schiebestößel 7 fest mit der ersten Trägerplatte 15 zu verbinden. - Die erste Trägerplatte 15 ist mit einem ersten Führungselement 25 (vorzugsweise einer Kurvenrolle), das in einer ersten Führungskurve 27 verschiebbar gelagert, starr verbunden. Die erste Führungskurve 27 verläuft im Wesentlichen linear in x-Richtung und ist in einem unteren Bereich des Schlittens 11 ausgebildet. Das erste Führungselement 25 führt die erste Trägerplatte 15 entlang der ersten Führungskurve 27. Das erste Führungselement 25 wird entlang der ersten Führungskurve 27 in x-Richtung bewegt, wenn die zweite Antriebseinheit 45 betätigt wird.
- Der Schlitten 11 ist fest an einer ersten Riemenanordnung 29 befestigt. Die erste Riemenanordnung 29 besteht im Wesentlichen aus zwei Riemen 30, 31, an denen gegenüberliegende Enden des Schlittens 11 befestigt sind. Der Riemen 30 ist von einem Riemenrad 32 angetrieben, das wiederum von der ersten Antriebseinheit 37, vorzugsweise einem Servomotor, angetrieben ist. Der Riemen 30 treibt das Riemenrad 33 an, das an einem Ende einer Welle 34 angeordnet ist. Die Welle 34 überträgt die Drehung des Riemenrades 33 auf das Riemenrad 35, das an einem gegenüberliegenden Ende der Welle 34 angeordnet ist. Das Riemenrad 35 treibt wiederum den Riemen 31 an.
- Die zwei Riemen 30, 31 der ersten Riemenanordnung 29 sind vorzugsweise als Zahnriemen ausgebildet.
- Zusätzlich ist der Schlitten 11 in zwei gegenüberliegenden Führungsschienen 39 in y-Richtung geführt. Die Führungsschienen 39 dienen zur Stabilisation des Schlittens 11 während der Verschiebung in y-Richtung. Der Schlitten 11 ist mit einem Linearführungselement 40 fest verbunden, das in bzw. auf den Führungsschienen 39 geführt ist. Die gegenüberliegenden Führungsschienen 39 sind in einem Bereich nahe der Riemen 30, 31 angeordnet. Der Schlitten 11 ist über ein Verbindungselement 38 mit den Riemen 30, 31 verbunden, das ebenfalls mit dem Linearführungselement 40 fest verbunden ist. Es ist denkbar, auf die zusätzlichen Führungsschienen 39 zu verzichten.
- Die erste Trägerplatte 15 ist zusätzlich in y-Richtung verschiebbar an einer Führungsstange 41 gelagert. Die Führungsstange 41 kann eine Führungsschiene aufweisen, auf der die Trägerplatte 15 läuft. Die Führungsstange 41 ist wiederum mit gegenüberliegenden Riemen 109, 117 einer zweiten Riemenanordnung 43 über Verbindungselemente 53 fest verbunden. Die zweite Riemenanordnung 43 ist von einer zweiten Antriebseinheit 45 angetrieben und verstellt bzw. bewegt die erste Trägerplatte 15 in x-Richtung. Auf die zweite Riemenanordnung 43 wird weiter unten unter Bezugnahme auf
Fig. 3 noch näher eingegangen. - Zusätzlich ist die Führungsstange 41, ähnlich wie der Schlitten 11, in zwei gegenüberliegenden Führungsschienen 49 verschiebbar gelagert. Die Führungsschienen 49 sind zur Stabilisation der Führungsstange 41 und somit auch der ersten Trägerplatte 15 beim Verschieben in x-Richtung vorgesehen. Die zwei gegenüberliegenden Führungsschienen 49 sind jeweils in einem Bereich nahe der zweiten Riemenanordnung 43 in x-Richtung verlaufend angeordnet. Die Führungsstange 41 ist an beiden Enden jeweils mit einem Linearführungselement 51 verbunden. Das Linearführungselement 51 ist in bzw. auf den Führungsschienen 49 in x-Richtung geführt.
- Alternativ zu den Führungsschienen 39, 49 sind eine Nutkurve oder andere Führungsmittel denkbar. Die erste und die zweite Antriebseinheit 37, 45 sind vorzugsweise als Servomotoren ausgebildet.
- Bezugnehmend auf
Fig. 3 ist auf der zweiten Trägerplatte 69 wiederum mindestens ein individuell ansteuerbarer Pneumatikzylinder 71 angeordnet, der in Wirkverbindung mit der mindestens einen Einschubunterstützungszunge 9 steht und über eine Verbindungsstange 73 mit der Einschubunterstützungszunge 9 verbunden ist. Die Einschubunterstützungszunge 9 kann direkt an der Verbindungsstange 73 befestigt sein, oder wie dargestellt über ein höhenverstellbares Verbindungselement 75. Die Einschubunterstützungszunge 9 ist vorzugsweise als flache, sich in erster Linie in y-Richtung erstreckende Platte ausgebildet, um von oben auf die Blisterverpackungen 13 aufgelegt bzw. abgesenkt werden zu können. Die Verbindungsstange 73, das Verbindungselement 75 und die Einschubunterstützungszunge 9 bilden im Wesentlichen eine Z-Form, wobei vorzugsweise das Verbindungselement 75 in einem 90°-Winkel von der Verbindungsstange 73 abragt und die Einschubunterstützungszunge 9 wiederum vorzugsweise in einem 90°-Winkel von dem Verbindungselement 75 abragt. Die Einschubunterstützungszunge 9 liegt somit tiefer als die Verbindungsstange 73. - Ähnlich wie bei der Einschubeinheit 3 können auch hier Ventile 74 vorgesehen sein, die ebenfalls auf der zweiten Trägerplatte 69 angeordnet sind und aus denselben Gründen zur Ansteuerung der Pneumatikzylinder 71 dienen.
- Die zweite Trägerplatte 69 ist über ein zweites Führungselement 77, vorzugsweise eine Kurvenrolle, in der zweiten Führungskurve 79 geführt. Ein drittes Führungselement 81, das in einer dritten Führungskurve 83 geführt ist, ist ebenfalls mit der zweiten Trägerplatte 69 verbunden. Das dritte Führungselement 81 ist vorzugsweise als Kurvenrolle ausgebildet. Es ist aber auch vorstellbar, dass die Führungselemente 77, 81 als Stifte oder als Schlitten ausgebildet sind. Die zweite und die dritte Führungskurve 79, 83 sind vorzugsweise als Nutkurven ausgebildet. Alternativen wie Linearführungen oder weitere führungsgeeignete Elemente sind vorstellbar.
- Das zweite Führungselement 77 ist fest mit einem ersten Halter 85 verbunden, der in einer Linearführung 87 in y-Richtung verschiebbar gelagert ist. Der erste Halter 85 weist im Wesentlichen eine umgekehrte U-Form auf und ist über einen Verbindungsstift 87 mit der zweiten Trägerplatte 69 drehbar verbunden. Es sind auch andere Formen, wie beispielsweise eine umgekehrte V-Form oder ein nach unten offener Halbkreis, für den ersten Halter 85 denkbar. Der Verbindungsstift 87 erstreckt sich vorzugsweise durch zwei Schenkel 88 des U-förmigen ersten Halters 85 und ist drehbar an der zweiten Trägerplatte 69 gelagert. Denkbar ist aber auch, dass zwei Verbindungsstifte 87 vorgesehen sind, die jeweils einen Schenkel 88 des U-förmigen ersten Halters 85 durchdringen und drehbar mit der zweiten Trägerplatte 69 verbunden sind.
- Der erste Halter 85 ist in einer Linearführung 89 geführt, die sich in y-Richtung erstreckt und die mit der dritten Führungskurve 83 verbunden ist. Die Linearführung 89 kann beispielsweise als Nutkurve ausgebildet sein, in der der erste Halter 85 durch ein geeignetes Führungselement (nicht dargestellt) verschiebbar gelagert ist. Verschiedene Arten von Führungselementen sind hier denkbar.
- Das zweite Führungselement 77 ist in der zweiten Führungskurve 79 im Wesentlichen in x-Richtung geführt. Die zweite Führungskurve 79 ist fest mit dem Schlitten 11 verbunden oder vorzugsweise als ein einstückiges Teil mit dem Schlitten 11 und somit mit der ersten Führungskurve 27 ausgebildet. Eine Verschiebung des Schlittens 11 in y-Richtung bewirkt gleichzeitig eine identische Verschiebung der ersten und der zweiten Führungskurve 27, 79 in y-Richtung. Damit die zweite Führungskurve 79 an unterschiedliche Anforderungen angepasst werden kann, ist eine Längenverstellbarkeit der zweiten Führungskurve 79, manuell oder motorisch, in x-Richtung denkbar.
- Die zweite Führungskurve 79 umfasst im Wesentlichen einen linearen, in x-Richtung verlaufenden Abschnitt 91 und einen zu dem linearen Abschnitt 91 schräg oder gekrümmt verlaufenden Abschnitt 93. Der linear verlaufende Abschnitt 91 ist in der Nähe des Anfangsbereichs der Bewegung der Einschubunterstützungseinheit 5 angeordnet, und der schräg oder gekrümmt verlaufende Abschnitt 93 ist in der Nähe des Endbereichs der Bewegung der Einschubunterstützungseinheit 5 angeordnet. Der schräg oder gekrümmt verlaufende Abschnitt 93 verläuft schräg oder gekrümmt nach hinten, d.h. in einer von den Schiebestößeln 7 der Einschubeinheit 3 und den Einschubunterstützungszungen 9 der Einschubunterstützungseinheit 5 bzw. von der ersten und der zweiten Trägerplatte 13, 69 abgewandten Richtung, so dass die Einschubunterstützungszungen 9 eine Relativbewegung zu den Schiebestößeln 7 in y-Richtung nach hinten erfahren, wenn das zweite Führungselement 77 der Einschubunterstützungseinheit 5 in x-Richtung aus dem linear verlaufenden Abschnitt 91 durch den schrägen oder gekrümmten Abschnitt 93 bewegt wird.
- Wenn der Schlitten 11 in y-Richtung bewegt wird oder wenn das zweite Führungselement 77 durch den schräg oder gekrümmt verlaufenden Abschnitt 93 bewegt wird, wird das dritte Führungselement 81, das in der dritten Führungskurve 83 verschiebbar gelagert ist, in y-Richtung bewegt. Das dritte Führungselement 81 ist drehbar mit einem Verbindungselement 95 verbunden, das wiederum starr mit der zweiten Trägerplatte 69 verbunden ist. Das Verbindungselement 95 ist vorzugsweise als ein Z-förmiges Verbindungselement ausgebildet. Es ist aber auch denkbar, dass das Verbindungselement 95 eine andere winkelförmige Gestalt aufweist oder dass das Verbindungselement 95 als eine schräge Verbindung zwischen dem dritten Führungselement 79 und der zweiten Trägerplatte 69 ausgebildet ist.
- Die dritte Führungskurve 83, in der das dritte Führungselement 79 verschiebbar gelagert ist, weist zwei zueinander höhenversetzte lineare Bereiche 97, 99 und dazwischen einen gekrümmten Übergangsbereich 101 auf. Der niedrigere lineare Bereich 99 ist in einem hinteren Bereich und der höhere lineare Bereich 97 in einem vorderen Bereich der Schiebevorrichtung 1, in y-Richtung betrachtet, angeordnet. Der gekrümmte Übergangsbereich 101 weist eine S-förmige Krümmung bzw. eine abgerundete Krümmung auf, so dass das dritte Führungselement 79 in dem gekrümmten Übergangsbereich 101 flüssig bewegt werden kann.
- Die dritte Führungskurve 83 ist fest mit der Linearführung 89 verbunden. Es ist auch denkbar, dass die Linearführung 89 und die dritte Führungskurve 83 einstückig miteinander ausgebildet sind. Sowohl die dritte Führungskurve 83 als auch die Linearführung 89 verlaufen in y-Richtung und sind zusammen mit der Einschubunterstützungseinheit 5 in x-Richtung bewegbar. Es ist denkbar, dass die dritte Führungskurve 83, und somit auch die Linearführung 89, zur Anpassung an unterschiedliche Rahmenbedingungen in y-Richtung längsverstellbar sind. Das kann manuell oder über einen Verstellmotor erfolgen.
- Vorzugsweise ist die Linearführung 89 an ihrem vorderen und hinteren Ende an zwei Führungselementen 103 befestigt. Die Führungselemente 103 sind jeweils an einer linearen Führungsschiene 105 geführt und in x-Richtung hin- und herbewegbar. An den Führungselementen 103 ist jeweils ein Verbindungsbauteil 106 angeordnet, das an der zweiten Riemenanordnung 43 befestigt ist und in x-Richtung hin- und herbewegbar ist.
- Die zweite Riemenanordnung 43 verschiebt die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 in x-Richtung. Die zweite Riemenanordnung 43 umfasst mehrere Riemen und Riemenräder, die von der zweiten Antriebseinheit 45 angetrieben werden, worauf im Folgenden näher eingegangen wird.
- Die zweite Antriebseinheit 45 treibt zunächst das Riemenrad 107 an, das wiederum den Riemen 109 antreibt. Der Riemen 109 ist wiederum mit einem Riemenrad 111 verbunden, das wiederum über eine Welle 113 mit dem Riemenrad 115 verbunden ist und somit die Kraft der zweiten Antriebseinheit 45 auf den Riemen 117 überträgt. Das Riemenrad 111 und das Riemenrad 115 sind an gegenüberliegenden Enden der Welle 113 angeordnet. Auf diese Weise entsteht eine Riemenanordnung, bei der die Riemen 109, 117 gleichsinnig von der zweiten Antriebseinheit 45 angetrieben sind. Auf diese Weise kann die Einschubeinheit 3, die an den Riemen 109, 117 befestigt ist, sicher und ausbalanciert in x-Richtung verschoben werden.
- Zum Verschieben der Einschubunterstützungseinheit 5 in x-Richtung sind an gegenüberliegenden Enden der Welle 113 zusätzlich Riemenräder 123 angeordnet, die die Bewegung der zweiten Antriebseinheit 45 in einen oberen Bereich der Riemenanordnung 43 übertragen. Die Riemenräder 123 übertragen die Bewegung der zweiten Antriebseinheit 45 auf Riemen 125, 145, die wiederum die Riemenräder 127, 135 antreiben. Die Riemenräder 127, 135 sind auf gegenüberliegenden Enden einer Welle 129 angeordnet, auf der ebenfalls die Riemenräder 133 und 135 angeordnet sind. Die Riemenräder 131, 133 treiben schließlich Riemen 137, 141 an. Sämtliche Riemen sind vorzugsweise als Zahnriemen ausgebildet.
- An den Riemen 137 und 141 ist jeweils eines der Verbindungsbauteile 106 befestigt, die mit der Einschubunterstützungseinheit 5 verbunden sind. Die Bewegung der Riemen 137, 141 hat somit die Bewegung der Einschubunterstützungseinheit 5 in x-Richtung zur Folge. Durch die Riemenanordnung 43 wird somit gewährleistet, dass Einschubeinheit 3 und Einschubunterstützungseinheit 5 durch Bewegung nur einer Antriebseinheit 45 gleichzeitig in x-Richtung bewegt werden.
- Die Schiebevorrichtung 1 umfasst weiterhin zwei Gehäusewände 149, 150, die durch mindestens vier Verbindungsbalken 151, 152, 153, 154 miteinander verbunden sind. Die beiden Führungsschienen 39 sind an den beiden Innenseiten der Gehäusewände 149, 150 befestigt. Die Welle 34 ist an ihren gegenüberliegenden Enden in den beiden Gehäusewänden 149, 150 drehbar gelagert. Die Welle 113 ist in den Verbindungsbalken 151 und 153 drehbar gelagert und die Welle 129 ist in den Verbindungsbalken 152 und 154 drehbar gelagert.
- Der Ablauf des Einschiebevorgangs bzw. die Funktionsweise der Schiebevorrichtung 1 soll nun anhand der
Fig. 4 bis 8 verdeutlicht werden. - Wie bereits oben erwähnt, sind die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 zwischen einem Anfangsbereich und einem Endbereich in x-Richtung hin- und herbewegbar. Der Anfangsbereich befindet sich in den
Fig. 4 bis 8 im rechten Bereich der Schiebevorrichtung 1 und der Endbereich im linken Bereich der Schiebevorrichtung 1. Der Schlitten 11 ist zwischen einer hinteren und einer vorderen Position in y-Richtung hin- und herbewegbar, wobei die vordere Position die Position ist, in der die Schiebestößel 7 und die Einschubunterstützungszungen 9 die Blisterverpackungen in die Packmittel eingeschoben haben. - In
Fig. 4 befindet sich der Schlitten 11 in y-Richtung in einer hinteren Position und die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 in x-Richtung im Anfangsbereich. In dieser Position sind die Schiebestößel 7 und die Einschubunterstützungszungen 9 hinter die erste Transportvorrichtung 12 zurückgezogen. Die Einschubunterstützungszungen 9 sind außerdem in einer hochgeklappten Position bzw. die zweite Trägerplatte 69 in einer geneigten oder gekippten Position, weil sich das dritte Führungselement 81 im unteren linearen Bereich 99 der dritten Führungskurve 83 befindet. - Der Schlitten 11 und somit die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 werden nun durch die erste Antriebseinheit 37 aus der hinteren Position in y-Richtung in eine vordere Position gefahren. Dies hat auch zur Folge, dass die Einschubunterstützungszungen 9 sich auf die Blisterverpackungen 13 absenken, weil sich das dritte Führungselement 81 durch den gekrümmten Übergangsbereich 101 in den höheren linearen Bereich 97 der dritten Führungskurve 83 bewegt und somit die Kippung der zweiten Trägerplatte 69 aufgehoben wird. Das Angreifen der Schiebestößel 7 bzw. der Einschubunterstützungszungen 9 erfolgt im Wesentlichen gleichzeitig, d.h. erst wenn die Schiebestößel 7 beginnen, die Stapel von Blisterverpackungen 13 zu schieben, sollen die Einschubunterstützungszungen 9 abgesenkt sein. Dadurch wird der Stapel von Blisterverpackungen 13 zum einen in seiner vorgesehenen Form gehalten, um ordnungsgemäß in die Packmittel 16 eingeschoben werden zu können und zum anderen leicht zusammengedrückt, um nicht bei dem Einschiebevorgang in das Packmittel 16 mit diesem zu verkanten.
- In
Fig. 5 ist wie inFig. 1 die Phase dargestellt, in der der Einschiebevorgang bereits begonnen hat. - In
Fig. 6 ist der Einschiebevorgang abgeschlossen. Der Schlitten 11 befindet sich in y-Richtung in seiner vorderen Stellung, und die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 wurden von der zweiten Antriebseinheit 45 in x-Richtung in eine Stellung zwischen der Anfangsposition und der Endposition verschoben. Während dieser Bewegung erfolgt keine relative Verschiebung der Einschubunterstützungseinheit 5 zur Einschubeinheit 3, da die erste Führungskurve 27 und die zweite Führungskurve 79 in diesem Abschnitt beide linear verlaufen. - Bei einer weiteren Bewegung der Einschubeinheit 3 und der Einschubunterstützungseinheit 5 in x-Richtung gelangt das zweite Führungselement 77 in den schrägen oder gekrümmten Abschnitt 93 der zweiten Führungskurve 79 und bewirkt eine Relativbewegung der Einschubunterstützungseinheit 5 in y-Richtung bezüglich der Einschubeinheit 3 (
Fig. 7 ). Durch die Relativbewegung in y-Richtung werden die Einschubunterstützungszungen 9 aus den Packmitteln 16 herausgezogen, während die Schiebestößel 7 vor den Packmitteln 16 stehenbleiben, um zu verhindern, dass während des Herausziehens der Einschubunterstützungszungen 9 die Stapel an Blisterverpackungen 13 wieder mit aus den Packmitteln 16 herausgezogen werden. - Kurz bevor das dritte Führungselement 81 in den gekrümmten Übergangsbereich 101 gelangt, ist der Herausziehvorgang der Einschubunterstützungszungen 9 aus dem Packmittel abgeschlossen. Anschließend wird der Schlitten 11 in y-Richtung nach hinten bewegt, wodurch sich sowohl die Einschubeinheit 3 als auch die Einschubunterstützungseinheit 5 ebenfalls weiter nach hinten bewegen (
Fig. 8 ). Dabei durchläuft das dritte Führungselement 81 den gekrümmten Übergangsbereich 101 in Richtung des niedrigeren linearen Bereichs 99, was zur Folge hat, dass die zweite Trägerplatte 69 gekippt wird und die Einschubunterstützungszungen 9 leicht schräg nach oben stehen. Der Kippvorgang der zweiten Trägerplatte 69 wird also ausschließlich durch den Höhenunterschied der zwei zueinander höhenversetzten linearen Bereiche 97, 99 bewirkt. - Ausgehend von
Fig. 8 , in der sich der Schlitten 11 in y-Richtung nahe einer hinteren Position befindet und die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 sich nahe dem Endbereich befinden, werden die Einschubeinheit 3 und die Einschubunterstützungseinheit 5 durch die zweite Antriebseinheit 45 in x-Richtung in den Anfangsbereich zurückbewegt (Fig. 4 ). Das zweite Führungselement 77 verlässt bei dieser Verschiebung den schrägen oder gekrümmten Bereich 93. Der Schlitten 11 wird dabei in y-Richtung noch weiter nach hinten verfahren. Das dritte Führungselement 81 bleibt jedoch in dem unteren linearen Bereich 99. - Es sind viele Modifikationen der erfindungsgemäßen Schiebevorrichtung denkbar. Beispielsweise kann anstelle der Schwenkbewegung der zweiten Trägerplatte 69 der Hub der zweiten Trägerplatte 69 auch über eine vertikale Linearbewegung erfolgen.
Claims (13)
- Schiebevorrichtung zum Befüllen von Packmitteln (16) mit Blisterverpackungen (13), mit
einer Einschubeinheit (3) zum Einschieben der Blisterverpackungen (13) in die Packmittel (16) mit einer ersten Trägerplatte (15), an der mindestens ein Schiebestößel (7) befestigt ist;
einer Einschubunterstützungseinheit (5) zum Unterstützen der Einschubeinheit (3) während des Einschubvorgangs, mit einer zweiten Trägerplatte (69), an der mindestens eine Einschubunterstützungszunge (9) befestigt ist;
einem Schlitten (11), an dem eine erste Führungskurve (27) und eine zweite Führungskurve (79) ausgebildet sind, wobei in der ersten Führungskurve (27) ein erstes Führungselement (25), das mit der Einschubeinheit (3) verbunden ist, verschiebbar gelagert ist, und wobei in der zweiten Führungskurve (79) ein zweites Führungselement (77), das mit der Einschubunterstützungseinheit (5) verbunden ist, verschiebbar gelagert ist;
einer ersten Antriebseinheit (37) zum Bewegen des Schlittens (11) und somit der Einschubeinheit (3) und der Einschubunterstützungseinheit (5) in einer y-Richtung; und
einer zweiten Antriebseinheit (45) zum Bewegen der Einschubeinheit (3) und der Einschubunterstützungseinheit (5) in einer x-Richtung, die senkrecht zur y-Richtung ist, relativ zu dem Schlitten (11), wobei beim Bewegen der Einschubeinheit (3) und der Einschubunterstützungseinheit (5) in der x-Richtung das erste Führungselement (25) in der ersten Führungskurve (27) und das zweite Führungselement (77) in der zweiten Führungskurve (79) geführt ist. - Schiebevorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die Einschubeinheit (3) und die Einschubunterstützungseinheit (5) in der x-Richtung zwischen einem Anfangsbereich und einem Endbereich hin- und herbewegbar sind.
- Schiebevorrichtung nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass der Schlitten (11) in der y-Richtung zwischen einer hinteren und einer vorderen Position hin- und herbewegbar ist.
- Schiebevorrichtung nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass das zweite Führungselement (77) mit einem ersten Halter (85) der zweiten Trägerplatte (69) verbunden ist, wobei der erste Halter (85) in einer Linearführung (89) in der y-Richtung verschiebbar gelagert ist und drehbar mit der zweiten Trägerplatte (69) verbunden ist.
- Schiebevorrichtung nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass die erste Führungskurve (27) im Wesentlichen linear ausgebildet ist und die zweite Führungskurve (79) einen im Wesentlichen linearen, in der x-Richtung verlaufenden Abschnitt (91) und einen zu dem linearen Abschnitt (91) schräg oder gekrümmt verlaufenden Abschnitt (93) umfasst.
- Schiebevorrichtung nach Anspruch 5, dadurch gekennzeichnet, dass der schräg oder gekrümmt verlaufende Abschnitt (93) der zweiten Führungskurve (79) im Wesentlichen in einer dem mindestens einen Schiebestößel (7) der Einschubeinheit (3) und der mindestens einen Einschubunterstützungszunge (9) der Einschubunterstützungseinheit (5) abgewandten Richtung verläuft, so dass bei Bewegung des zweiten Führungselements (77) entlang dem schräg oder gekrümmt verlaufenden Abschnitt (93) der zweiten Führungskurve (79) die mindestens eine Einschubunterstützungszunge (9) relativ zu dem mindestens einen Schiebestößel (7) in der y-Richtung bewegt wird.
- Schiebevorrichtung nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass eine dritte Führungskurve (83) vorgesehen ist, die zusammen mit der Einschubunterstützungseinheit (5) in der x-Richtung bewegbar ist und in der ein drittes Führungselement (81) in der y-Richtung verschiebbar gelagert ist, wobei das dritte Führungselement (81) über ein Verbindungselement (95) mit der zweiten Trägerplatte (69) der Einschubunterstützungseinheit (5) starr verbunden ist.
- Schiebevorrichtung nach Anspruch 7, dadurch gekennzeichnet, dass die dritte Führungskurve (83) zwei zueinander höhenversetzte lineare Bereiche (97, 99) und einen gekrümmten Übergangsbereich (101) umfasst, so dass die zweite Trägerplatte (69) eine Schwenkbewegung im Wesentlichen in einer z-Richtung, die senkrecht zu der x-Richtung und der y-Richtung ist, erfährt, wenn das dritte Führungselement (81) den gekrümmten Übergangsbereich (101) durchläuft.
- Schiebevorrichtung nach Anspruch 7 oder 8, dadurch gekennzeichnet, dass die erste, die zweite und die dritte Führungskurve (27, 79, 83) als Nutkurven ausgebildet sind und das erste, das zweite und das dritte Führungselement (25, 77, 81) als Kurvenrollen ausgebildet sind.
- Schiebevorrichtung nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass der mindestens eine Schiebestößel (7) und die mindestens eine Einschubunterstützungszunge (9) jeweils mit einem individuell ansteuerbaren Pneumatikzylinder (17, 71) in Wirkverbindung stehen.
- Schiebevorrichtung nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass der Schlitten (11) an einer ersten Riemenanordnung (29) befestigt ist und die erste Riemenanordnung (29) von der ersten Antriebseinheit (37) angetrieben ist.
- Schiebevorrichtung nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass die erste Trägerplatte (15) in der y-Richtung verschiebbar an einer Führungsstange (41) gelagert ist und über die Führungsstange (41) mit einer zweiten Riemenanordnung (43) verbunden ist, die von der zweiten Antriebseinheit (45) angetrieben ist.
- Schiebevorrichtung nach Anspruch 12, rückbezogen auf Anspruch 7, 8 oder 9, dadurch gekennzeichnet, dass das zweite Führungselement (77) mit einem ersten Halter (85) der zweiten Trägerplatte (69) verbunden ist, wobei der erste Halter (85) in einer Linearführung (89) in der y-Richtung verschiebbar gelagert ist und drehbar mit der zweiten Trägerplatte (69) verbunden ist, und wobei die dritte Führungskurve (83) und die Linearführung (89) an der zweiten Riemenanordnung (43) befestigt sind.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14177578.3A EP2974970B1 (de) | 2014-07-18 | 2014-07-18 | Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14177578.3A EP2974970B1 (de) | 2014-07-18 | 2014-07-18 | Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2974970A1 EP2974970A1 (de) | 2016-01-20 |
| EP2974970B1 true EP2974970B1 (de) | 2016-10-26 |
Family
ID=51211099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14177578.3A Active EP2974970B1 (de) | 2014-07-18 | 2014-07-18 | Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2974970B1 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109264079A (zh) * | 2018-11-05 | 2019-01-25 | 定州市冀鲁制针有限公司 | 一种手工针排针插板装置 |
| CN111114893A (zh) * | 2020-01-18 | 2020-05-08 | 浙江希望机械有限公司 | 高速泡罩装盒机 |
| US11673698B2 (en) | 2020-03-10 | 2023-06-13 | Blue Sky Ventures (Ontario) Inc. | Continuous motion filling system and filling machine and methods |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10123217A1 (de) | 2001-05-12 | 2002-11-28 | Bosch Gmbh Robert | Vorrichtung zum Einschieben von Packgut in Packmittel |
| US7631472B2 (en) * | 2007-03-01 | 2009-12-15 | Frederick Lidington | Integrated barrel loader and confiner apparatus for use in a cartoning system |
| DE102008010896A1 (de) * | 2008-02-23 | 2009-08-27 | Iwk Verpackungstechnik Gmbh | Vorrichtung zum Einschieben von Produkten in Verpackungsbehältnisse |
-
2014
- 2014-07-18 EP EP14177578.3A patent/EP2974970B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2974970A1 (de) | 2016-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CH418956A (de) | Maschine zum Kartonieren von Füllgut aller Art | |
| EP2881332B1 (de) | Transportvorrichtung zum Fördern von Produkten | |
| DE102008010896A1 (de) | Vorrichtung zum Einschieben von Produkten in Verpackungsbehältnisse | |
| EP2035283A1 (de) | Vorrichtung zur behandlung von flexiblen schlauchartigen gebilden mit wenigstens einer öffnung | |
| EP3034414A1 (de) | Verfahren zum Übertragen von Packgut in Behältnisse und zum Weitertransport der befüllten Behältnisse | |
| EP0345585A2 (de) | Fördervorrichtung für Süsswarenstücke | |
| EP2974970B1 (de) | Schiebevorrichtung zum Befüllen von Packmitteln mit Blisterverpackungen | |
| EP2865618B1 (de) | Vorrichtung zur Übergabe von Blisterpackungsstapeln | |
| EP1389166B2 (de) | Vorrichtung zum einschieben von packgut in packmittel | |
| EP3241767A1 (de) | Verarbeitungsvorrichtung für folienbeutel | |
| DE4329179A1 (de) | Maschine zum Umsetzen von Artikeln in eine Verpackungseinheit | |
| EP1445224B2 (de) | Vorrichtung zum Bilden von Stapeln aus flächigen Gegenständen | |
| DE102015113650B4 (de) | Vorrichtung zum Aufstecken von Ventilsäcken und Verfahren zum Betreiben | |
| DE60221268T2 (de) | Übergabevorrichtung für zylindrische stapel von auf einer kante angeordneten produkten | |
| DE102009000750B4 (de) | Druckformzuführung und ein Verfahren zum Transport zumindest einer Druckform | |
| EP2061610A1 (de) | Stanzvorrichtung und stanzverfahren | |
| CH652674A5 (de) | Vorrichtung zum aufteilen von in einer reihe zulaufenden gegenstaenden und verfahren zum betrieb der vorrichtung. | |
| CH661018A5 (de) | Verfahren und vorrichtung zum abtrennen von gruppen scheibenfoermiger gegenstaende aus einem als strom zulaufenden stapel. | |
| EP2977325A1 (de) | Schalenverschließmaschine mit Seitenbeladung und Verfahren zum Aufbringen einer Folie | |
| DE19920614A1 (de) | Verpackungsmaschine | |
| DE1936371B2 (de) | Vorrichtung zum Abfördern fertiger Stapel von Druckerzeugnissen | |
| DE2900615A1 (de) | Austragvorrichtung fuer verpackungsmaschinen von zigaretten-schachteln, insbesondere aus steifem karton und mit angefalztem klappdeckel | |
| DE202004010068U1 (de) | Wendevorrichtung zum Handhaben von Packungen aus gefalteten blattförmigen Produkten | |
| DE1921813A1 (de) | Selbsttaetige Heftmaschine fuer Kartons | |
| DE1153234B (de) | Vorrichtung zur Herstellung von Faltschachteln |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20160310 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160613 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 839815 Country of ref document: AT Kind code of ref document: T Effective date: 20161115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014001781 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170127 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170126 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170226 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170227 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014001781 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170126 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20170727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180330 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502014001781 Country of ref document: DE Representative=s name: KROHER . STROBEL RECHTS- UND PATENTANWAELTE PA, DE Ref country code: DE Ref legal event code: R081 Ref document number: 502014001781 Country of ref document: DE Owner name: UHLMANN PAC-SYSTEME GMBH & CO. KG, DE Free format text: FORMER OWNER: UHLMANN PAC-SYSTEME GMBH & CO KG, 88471 LAUPHEIM, DE Ref country code: DE Ref legal event code: R082 Ref document number: 502014001781 Country of ref document: DE Representative=s name: KROHER STROBEL RECHTS- UND PATENTANWAELTE PART, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 839815 Country of ref document: AT Kind code of ref document: T Effective date: 20190718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190718 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502014001781 Country of ref document: DE Representative=s name: KROHER STROBEL RECHTS- UND PATENTANWAELTE PART, DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230727 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230727 Year of fee payment: 10 |