EP0889980B1 - Dispositif electromagnetique pour l'actionnement automatise des aiguilles d'une mecanique jacquard - Google Patents
Dispositif electromagnetique pour l'actionnement automatise des aiguilles d'une mecanique jacquard Download PDFInfo
- Publication number
- EP0889980B1 EP0889980B1 EP97914377A EP97914377A EP0889980B1 EP 0889980 B1 EP0889980 B1 EP 0889980B1 EP 97914377 A EP97914377 A EP 97914377A EP 97914377 A EP97914377 A EP 97914377A EP 0889980 B1 EP0889980 B1 EP 0889980B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- plates
- pushers
- plate
- needles
- selection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000005672 electromagnetic field Effects 0.000 claims description 9
- 238000004804 winding Methods 0.000 claims description 7
- 230000005484 gravity Effects 0.000 claims description 4
- 230000005294 ferromagnetic effect Effects 0.000 claims description 2
- 230000003100 immobilizing effect Effects 0.000 claims 1
- 210000002105 tongue Anatomy 0.000 description 14
- 210000000056 organ Anatomy 0.000 description 6
- 239000011111 cardboard Substances 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000005291 magnetic effect Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000009527 percussion Methods 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000004753 textile Substances 0.000 description 1
- 238000009941 weaving Methods 0.000 description 1
Images


Classifications
-
- D—TEXTILES; PAPER
- D04—BRAIDING; LACE-MAKING; KNITTING; TRIMMINGS; NON-WOVEN FABRICS
- D04C—BRAIDING OR MANUFACTURE OF LACE, INCLUDING BOBBIN-NET OR CARBONISED LACE; BRAIDING MACHINES; BRAID; LACE
- D04C5/00—Twist or bobbin-net lace-making machines
- D04C5/16—Warp thread feeding or guiding devices
- D04C5/18—Guide bars; Guiding means therefor; Pattern input by control thereof
-
- D—TEXTILES; PAPER
- D04—BRAIDING; LACE-MAKING; KNITTING; TRIMMINGS; NON-WOVEN FABRICS
- D04B—KNITTING
- D04B27/00—Details of, or auxiliary devices incorporated in, warp knitting machines, restricted to machines of this kind
- D04B27/10—Devices for supplying, feeding, or guiding threads to needles
- D04B27/24—Thread guide bar assemblies
- D04B27/32—Thread guide bar assemblies with independently-movable thread guides controlled by Jacquard mechanisms
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/16—Rectilinearly-movable armatures
- H01F7/1607—Armatures entering the winding
- H01F7/1615—Armatures or stationary parts of magnetic circuit having permanent magnet
Definitions
- the present invention relates to an electromagnetic device for automated actuation of the needles with a Jacquard mechanism, as well than a Jacquard machine equipped with such a device. It concerns more precisely a device intended to be moved relative to the needles a Jacquard mechanism, in order to push them selectively, according to a selection established automatically at each mechanical cycle Jacquard, by ordering electromagnetic means.
- the invention finds more particularly, but not exclusively, its application in the replacement of the perforated cardboards of the Jacquard looms used for the order lace looms, including lace looms Leavers.
- the selection rod of each solenoid is associated with a passage, and has for the function of closing this passage when it is brought into the extended position.
- the mechanical needles Jacquard all the needles which are found respectively at the passages closed by a selection rod are pushed by the device while moving.
- the needles of the Jacquard mechanism located with regard to these free passages penetrate inside the said passages during movement of the device, and are therefore not pushed by the latter.
- the selection rods act respectively on intermediate pushers, and have the function of locking them in exit position.
- the electromagnetic devices described in the application for European patent EP-A-0 382 998 advantageously allow on the one hand automatically select the needles of a Jacquard machine which must be pushed during a given cycle, by a control suitable for the power supply of the windings of each solenoid associated with a needle, and secondly to require energy very weak to control each solenoid.
- the solenoids described in this document however has the drawback of being bulky, and does not are therefore not suitable for carrying out the selection of needles of a Jacquard machine, arranged in successive rows, with a low spacing between rows, and in particular a spacing less than centimeter.
- the object of the present invention is to propose a device electromagnetic which has the advantages of the devices of the aforementioned European patent application, but which is composed of electromagnetic selection with a smaller footprint, so that it can be adapted to the control of the needles of a Jacquard mechanics arranged in successive tight rows.
- the device of the invention finds more particularly its application to Jacquard machines used to order lace looms Leavers, and for which the spacing between two successive rows of needles is very small, and of the order of 6mm.
- the invention is however not limited to this particular type of Jacquard mechanics, but can be generally applied to all types of Jacquard mechanics, controlled by needles to be pushed selectively, and arranged in successive rows.
- This may include, in particular: mechanical Jacquard with strings or hooks for ordering looms textiles, including weaving looms. It could also be jacquard looms of the type described in the French patent application FR-A-2 704 562, the needles of which must be pushed, and said needles drooping, control the movement of flexible needles called percussion arranged transversely to the falling needles. Finally, the Jacquard mechanics needles to be pushed so selective by the device of the invention may be arranged vertically or horizontally.
- the device of the invention on the one hand is intended to be moved at each cycle of Jacquard mechanics by in relation to the needles, in order to push them individually so selective, and on the other hand implements for each needle a selection which is movable in a direction transverse to the direction of pushing of the device between a first selection position and a second withdrawal position, and the displacement between the two positions selection and removal can be controlled electromagnetically, from so that when it moves the device pushes only Jacquard mechanical needles which are associated with a selection member in the selection position.
- the device includes a plurality of parallel plates spaced two by two with a spacing identical to that separating two successive rows needles; in the space between two successive plates, on the one hand are mounted the selection members associated with the needles of the same row, which selection members are movable in the same parallel plane to that of the plates, and on the other hand is provided, for each organ of selection, a two-part electromagnetic circuit, used to create at least one induced electromagnetic field oriented transversely to plane of the plates, the two parts of the electromagnetic circuit being mounted respectively on the opposite faces of these two plates and consisting respectively of a main part wound with at least two opposite electromagnetic polar ends, and an armature of closing of the electromagnetic field arranged opposite the part main wirewound; each selection body also has a magnetized part which is positioned between the two parts of the circuit associated electromagnetic, so as to allow sound control displacement.
- each plate either fitted on each of its two sides or exclusively with parts wound, either exclusively from field closing frames electromagnetic.
- all the plates will be of the same type, and each plate has on one of its sides the wound parts of the electromagnetic circuits, and on its other side the closing frames which are intended to close respectively each electromagnetic field induces parts wound from the adjacent plate.
- This variant has the advantage of reduce manufacturing costs, because all the plates are identical.
- the wound parts and the reinforcements closure of a plate can be separated, and for example glued respectively on the two faces of each plate.
- each closing frame a plate is preferably formed by the base of a carcass ferromagnetic whose part opposite to the base is wound, and which is fixed through the plate, so that the base and the wound part of the carcass are located respectively on each side of the plate.
- the device comprises between each plate, and for each selection member, a separate pusher, which is movable relative to the plates, in the plane of the plates and in a transverse direction to the axis of movement of the selection members, and which can be locked in the extended position relative to the plates, by the selection member associated, position in which the pusher can push the needle associated with Jacquard mechanics when moving the device.
- a separate pusher which is movable relative to the plates, in the plane of the plates and in a transverse direction to the axis of movement of the selection members, and which can be locked in the extended position relative to the plates, by the selection member associated, position in which the pusher can push the needle associated with Jacquard mechanics when moving the device.
- each pusher can be placed in position exit from plates and selection devices by any means suitable, in order to be locked if necessary in this position. This can be obtained in a first variant by moving the formed assembly by the parallel plates and the selection members with respect to the pushers.
- the device comprises a plate reset, and the assembly formed by the parallel plates and the selection members is movable in translation relative to the plate resetting, along the axis of the pushers, between a first position in which the set of pushers is in contact with the plate reset and in the out position, and a second position in which only the pushers locked in the extended position relative to the plates are brought into contact with the corresponding mechanical needles Jacquard, the pushers not locked in the extended position not being entrained and remaining in contact with the rearming plate.
- the device of the invention comprises, in a second variant, a rearming plate which is movable in translation with respect to the plates and the selection members, and according to the axis of the pushers, and which has the function at each mechanical cycle Jacquard to bring and keep the lifters in the extended position by relation to the plates, during the control of the displacement of the organs Selection.
- the rearming plate according to the invention can in a way general be used in any device that allows pushing so automatic and selective needles of a Jacquard machine, by via lockable pushers in the extended position by means of selection bodies.
- This additional feature of the invention is therefore independent of the implementation of the main means of the invention, that is to say the particular structure in several parallel plates, with for each space between plates, a plurality of circuits electromagnetic in two parts, allowing to create each at least an induced electromagnetic field oriented transversely to the plane of plates, for controlling the movement of each selection member needles in the same row.
- this rearming plate can be fitted to the variant of FIG. 4 of the European patent application EP-A-0 382 998.
- the device of Figures 1 to 3 is intended to be mounted on a Jacquard machine (not shown) with falling needles 1, plus commonly known as droppers, such as those used for the order from a Leavers lace loom. It replaces the rotary cylinder serving as a support and allowing to drain the perforated cardboard box traditionally used to selectively push needles Jacquard mechanics.
- needles 1 of the Jacquard machine are arranged in a plurality of successive rows spaced at a constant spacing e and each comprising eight needles.
- the device comprises a plurality of identical parallel plates 2, which are spaced regularly with a spacing e identical to that of the rows of Jacquard mechanical needles, and which are secured to a guide plate perforated 3.
- plates 2 are vertical, while the guide plate perforated 3 is horizontal.
- the guide plate perforated 3 will be oriented in a plane transverse to needles 1 of the Jacquard machine, and the 2 plates will be oriented according to a plan parallel to the plane of the needles.
- Each perforation 3a of the guide plate 3 is intended to come in look of a needle 1 of Jacquard mechanics. If we refer to the Figure 1, these perforations are therefore arranged in a plurality of successive rows 4, at the rate of eight perforations 3a per row, each row 4 of perforations 3a corresponding to a row of needles 1 of the Jacquard mechanics.
- the vertical plates 2 are arranged by relative to the guide plate 3 so that a row 4 of perforations 3a is located between two successive plates 2.
- a mechanical Jacquard may include more than a hundred rows of needles.
- Eight vertical pushers 5 are inserted between each plate 2 due to a pusher 5 per needle 1 of the same row.
- the pushers 5 positioned between two plates 2 are each slidably mounted in a same plane 5a parallel to the plates 2, between a position retracted by relative to the plates 2, hereinafter called the low position, and an extended position relative to the plates 2, hereinafter called the high position, and are guided in translation by two supports 6a and 6b which allow blocking horizontally each pusher 5.
- the device is positioned relative to the Jacquard mechanics needles in a so-called push position, which is such that each pusher 5 is plumb with a needle 1.
- the device can be animated by a movement of translation relative to the needles 1 in a direction called thrust, which is symbolized by the double arrow D, and which is in this case vertical.
- thrust which is symbolized by the double arrow D, and which is in this case vertical.
- the device can either be constantly in its position thrust, and have a single translational movement relative to needles, or be animated, at each cycle of the Jacquard mechanism, in plus translational movement in the thrust direction, by movement to bring it into its pushed position.
- each space delimited by two successive plates 2 are mounted eight selection members 7 which are positioned in the same plane 7a parallel to the plates 2, that is to say in the present case in the same plane vertical.
- Each selection member 7 is associated with a pusher 5 and can slide horizontally under the action of electromagnetic means which will be described later, between a selection position in which the corresponding pusher 5 is locked in the high position, and a position withdrawal in which the pusher 5 is no longer locked in the high position and falls under the effect of gravity in the low position.
- the eight selection members 7 are divide into two groups of four on either side of the pushers 5.
- the four selection members 7 of the same group are guided to sliding by two supports 8a and 8b which allow blocking each selection member 7 vertically.
- supports 8a and 8b which allow blocking each selection member 7 vertically.
- each selection member consists of a flat tongue 9 of small thickness, having a shape substantially rectangular.
- plan 7a selection tabs 9 between two plates 1 is offset from in the plane 5a of the pushers 5, so that the pushers 5 cannot not obstruct the horizontal sliding of the selection tabs 9.
- the end 9a of each tongue 9 ends in a lateral lug 10 which is oriented transversely to the plane of the tongue, so as to come cut the plane 5a of the pushers 5.
- a notch 5b which in this case has the shape of a U.
- the notch 5b of a given pusher 5 is provided so that once the pusher 5 in the high position, it is located at the same level and in the extension of the tongue 9.
- a pusher 5 once a pusher 5 is brought in the high position, when the corresponding tongue 9 is brought in selection position by sliding it horizontally, its lug lateral 10 is introduced into the notch 5a of the corresponding pusher 5, and allows this pusher 5 to be blocked vertically in the high position.
- the lug 10 is released from the notch 5b of the pusher 5 corresponding, by sliding the tongue 9 horizontally in the direction reverse, which corresponds to the position of the dotted pin 10 of the Figure 3, the pusher 5 is no longer held vertically and falls in low position.
- each plate 2 is equipped with eight soft iron carcasses 11, comprising a base 12 and three legs lateral substantially forming an E with the base 12, namely two legs end 13a and a central tab 13b.
- On the central leg 13b is wound a coil 14.
- the two end tabs 13a thus constitute two electromagnetic polar ends of the same sign, and the tab central 13b constitutes a wound core forming a polar end electromagnetic of opposite sign to the end poles 13a.
- the signs end poles 13a and central pole 13b will be fixed by the direction current in the coil 14.
- Each carcass 11 is fixed through the plate 2 in a opening provided for this purpose, so that the base 12 is located positioned on the face 2a of the plate 2, and the poles 13a and 13b are are positioned on the other side 2b of the plate 2.
- the poles 13a and 13b of a carcass wound 11 of a given plate 2 (lower plate in FIG. 3) is are located opposite the base 12 of the carcass 11 of the plate which is adjacent to it (upper plate in Figure 3), and thus constitute with this base 12 an electromagnetic circuit making it possible to create locally, in the space between plates 2, two fields opposite induced electromagnetic C1 and C2.
- Each selection tab 9 is equipped with two magnets permanent 15a and 15b mounted in opposition. Each pair of magnets 15a and 15b of a selection tab 9 is positioned between the base 12 and the three poles 13a, 13b of a given electromagnetic circuit. On the face 2 for the sake of clarity, only the coils 14 of each circuit electromagnetic have been diagrammed in dotted lines, the carcasses 11 of plates 2 which have not been shown. As it clearly appears in this figure the electromagnetic circuits are divided into two groups of four circuits, on each side of the pushers 5, and the circuits of the same group are offset laterally in the plane of the plate, this which saves space in height. We find of course this same offset for the pairs of magnets 15a and 15b of the tongues 9 of the same group.
- the two magnets 15a and 15b of a tongue 9 constitute a bipole whose dimensions are such that it can channel its field magnetic on one or other of the end poles 13b depending on the direction of the two induced electromagnetic fields C1 and C2, that is to say in function of the direction of the current imposed in the coil 14.
- the bipole constituted by the two magnets 15a and 15b of the tongue 9 a tendency to come and channel its magnetic field on the end pole 13a on the right of the wound carcass 11 of the bottom plate 2, the tongue 9 thus undergoing a force tending to cause it to move towards the right.
- a first indexing stop 16 is provided at the level of the tongue end 9a 9 and makes it possible to maintain the tongue in this position, which corresponds to its selection position, the lug 10 being introduced into the notch 5b of the pusher 5.
- the bipole formed by the two magnets 15a and 15b seeks to channel its field magnetic on the left end pole 13a, which causes the moving the selection tab 9 to the left.
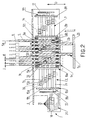
- a second stop indexing 17 ( Figure 2). The tongue 9 is therefore brought into position stable against this stop 17 (dotted position in FIG.
- the two stops indexing 16 and 17 have the function of preventing the bipole formed by the two magnets 15a and 15b to advance to a position where it would be centered on the corresponding end pole 13a.
- FIG. 3 The particular variant illustrated in FIG. 3, and using three electromagnetic pole ends 13a, 13b, a pair of magnets 15a, 15b, mounted in opposition, and two stops indexing 16 and 17, advantageously makes it possible to obtain a selection 7 which remains stable in its withdrawn position or in its position selection, even in the event of a power failure in coil 14.
- the bipole formed by the two magnets 15a and 15b by its magnetic field seeks to come to center on the corresponding polar end 13a, that is to say on Figure 3 on the right polar end 13a when the selection member 7 is in the selection position, and on the polar end 13a on the left when the selection member is in the withdrawn position.
- the selection body therefore remains constantly applied against the indexing stop 16 or 17 corresponding, even when no current flows in the coil 14. Thanks to this variant, on the one hand it is not necessary, once the selection member is brought into its withdrawal or selection position, to maintain the current in the coil 14 during all the time when pushes the needles of the Jacquard mechanism, and on the other hand the control of the Jacquard mechanism is not affected in the event of momentary power failure in a coil, during a cycle.
- each plate 2 is fitted with a new connector 18 terminals 19, and serves as a support for a printed circuit 20 making it possible to connect one of the two ends of each coil 14 at the same terminal 19 acting as common ground, and the other end of each coil 14 at a given terminal 19.
- the terminals 19 of the connector 18 of each plate 2 are connected to a processing unit (not shown) which is programmed to deliver mechanical cycles to each cycle Jacquard the desired control voltage for each coil 14, according to that the corresponding tab 9 must lock or not in the high position the corresponding pusher 5, which amounts to simulating respectively a solid or a hole in a perforated cardboard.
- a rearming plate 21 which is movable in translation relative to the plates 2 and to the selection tabs 9, and along the axis 5 e of the pushers 5, between a low position and a high position shown diagrammatically on dotted lines on FIG. 2.
- all of the pushers 5 consist of rods of the same length, the lower end 5c of which, called the cocking end, protrudes relative to the lower edge of the row of plates 2, at least when the pusher 5 is in the low position.
- the reset plate 21 is positioned such that when it is in the low position, the reset ends 5c of the pushers 5 which are in the low position come into contact with the upper face of the plate 21.
- the rearming plate 21 advantageously has a low inertia, and therefore allows movements with a high frequency with a relatively large amplitude.
- the round trip movement of the rearming plate 21 between its low position and its high position corresponding to the incremental rotation of the drive cylinder traditionally used for training perforated cardboard.
- the means already existing on mechanics will be used Jacquard for the rotation of the cylinder replaced by the the invention, in order to control the upward and downward movement of the reset plate 21.
- the main advantage of the invention lies in the fact that it allows to produce a device whose spacing e between two successive plates can be very small, and is also independent of the number of needles per row of Jacquard mechanics.
- Another advantage of the invention lies in its modular appearance. It is indeed very easy to modify a given device to adapt it to a other Jacquard machine with the same distance e between rows, but may have a different number of rows needles, or a different number of needles per row. It is enough for this to remove or add the desired number of plates 2, organs selection 7, and pushers 5. It should be noted here that the selection members 7 and the pushers 5 being simply mounted sliding with respect to the plates 2, their assembly in the spaces between plates, or on the contrary their disassembly, are very easy, and do not do not require any special tool.
- the invention is not limited to the preferred variant which has been described with reference to FIGS. 1 to 3.
- the device of the invention may be produced according to the variants below.
- each electromagnetic circuit creates a unique field electromagnetic induced and each selection organ will have only one permanent magnet.
- each coil controls the movement of the selection to bring it to a stop in a given position. It could be either from the withdrawal position or from the selection position.
- Each organ of selection further comprises an elastic return means, for example a coil spring, which is compressed when the selector is maintained in abutment position by electromagnetic means. When the current is cut in the coil 14, the elastic return means returns the selection member in the opposite direction to its withdrawn position or selection as appropriate.
- the axis 5e of the pushers 5 could be horizontal.
- the pushers can no longer fall back position retracted under the effect of gravity.
- each pusher will therefore be equipped with an elastic return means, of the spring type helical, which is compressed when the pusher is in its position which has the function of bringing the pusher back to the retracted position relaxing, when the pusher is no longer selected and the plate resetting leaves its position to hold the pushers in the extended position.
- each selection member will be designed to close off the corresponding orifice 3a of the guide plate 3.
- the selection members will consist, for example, of flat L-shaped tongues.
- the plate reset 21 pushes each push-button 5 via its arming end 5c which is opposite to its thrust end 5d, and which projects from the plates 2.
- the rearming plate can therefore advantageously be constituted by a simple plate full of thin.
- the rearming plate may be a perforated plate, through which the ends of the push 5d of the pushers 5, and which has the function of pulling the pushers in exit position.
- each pusher will for example be provided with level of its push end of a flange. This collar will have function to cooperate with the rearming plate to bring in position for pushing out.
- each selection member 7 could be designed so as to lock the push-button 5 corresponding to the level of its reset end, similar to the variant in figure 4 of European patent application EP-A-0.382.998.
- the pushers 5 are placed in the extended position relative to the plates 2, not not by putting the rearming plate 21 into translation in the direction of the pushers, but on the contrary by a translation relative to the rearming plate 21 of the assembly formed by the plates 2 and the selection members 7, along the 5th axis of the pushers 5.
- Operation of this variant is as follows. Prior to ordering displacement of the selection members 7, the plate 2-member assembly is brought selection 7 towards the rearming plate 21, in a first position in which all of the pushers 5 are in contact with the rearming plate.
- Pushers 5 locked in the extended position are driven by this assembly, up to one second position in which the pushers 5 locked in the extended position come in contact with the corresponding needles of the Jacquard mechanism.
- the pushers 5 not locked relative to the plates 2 remain stationary, in contact with the reset plate 21, the assembly (plates 2 - organs selection 7 - pushbuttons 5 locked in exit position) sliding by compared to pushers 5 not locked.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Knitting Machines (AREA)
- Looms (AREA)
Description
- la figure 1 est une vue partielle de dessus d'un dispositif de l'invention permettant la sélection automatique des aiguilles tombantes d'une mécanique Jacquard, disposées en rangées parallèles, à raison de huit aiguilles par rangée,
- la figure 2 est une vue en coupe selon un plan vertical du dispositif de la figure 1 entre deux plaques successives,
- et la figure 3 est une vue en coupe selon un plan horizontal du dispositif de la figure 1, localisée au niveau d'un organe de sélection entre deux plaques successives.
Claims (13)
- Dispositif pour l'actionnement automatisé des aiguilles (1) d'une mécanique Jacquard, lequel dispositif d'une part est destiné à être déplacé à chaque cycle de la mécanique Jacquard par rapport aux aiguilles (1) en vue de les pousser individuellement de manière sélective, et d'autre part met en oeuvre pour chaque aiguille un organe de sélection (7), qui est mobile dans une direction transversale à la direction de poussée du dispositif entre une première position de sélection et une seconde position de retrait, et dont le déplacement entre les deux positions de sélection et de retrait peut être commandé électromagnétiquement, de telle sorte que lors de son déplacement le dispositif vient pousser uniquement les aiguilles de la mécanique Jacquard qui sont associées à un organe de sélection (7) en position de sélection, caractérisé en ce que les aiguilles (1) de la mécanique Jacquard étant disposées en rangées successives parallèles, il comprend une pluralité de plaques (2) parallèles, espacées deux à deux avec un écartement e identique à celui séparant deux rangées successives d'aiguilles, en ce que dans l'espace entre deux plaques (2) successives, d'une part sont montés les organes de sélection (7) associés aux aiguilles (1) d'une même rangée, lesquels organes de sélection sont mobiles dans un même plan parallèle à celui des plaques (2), et d'autre part est prévu, pour chaque organe de sélection (7), un circuit électromagnétique en deux parties, permettant de créer au moins un champ électromagnétique induit (C1) orienté transversalement au plan des plaques (2), les deux parties du circuit électromagnétique étant montées respectivement sur les faces (2a,2b) en vis-à-vis de ces deux plaques et consistant respectivement en une partie principale bobinée (13a, 13b, 14) avec au moins deux extrémités polaires électromagnétiques opposées, et une armature de fermeture (12) du champ électromagnétique disposée en vis-à-vis de la partie principale bobinée, et en ce que chaque organe de sélection (7) comporte une partie aimantée qui est positionnée entre les deux parties du circuit électromagnétique associé, en sorte de permettre la commande de son déplacement.
- Dispositif selon la revendication 1 caractérisé en ce que chaque plaque (2) comporte sur l'une de ses faces les parties bobinées des circuits électromagnétiques, et sur son autre face les armatures de fermeture qui sont destinées à fermer respectivement chaque champ électromagnétique induit des parties bobinées de la plaque (2) adjacente.
- Dispositif selon la revendication 2 caractérisé en ce que chaque armature de fermeture d'une plaque (2) est constituée par l'embase (12) d'une carcasse ferromagnétique (11), dont la partie opposée à l'embase est bobinée, et qui est fixée à travers la plaque (2), de telle sorte que l'embase (12) et la partie bobinée de la carcasse se trouvent respectivement de chaque côté de la plaque (2).
- Dispositif selon l'une des revendications 1 à 3 caractérisé en ce que chaque partie bobinée comporte trois extrémités polaires électromagnétiques, formant respectivement deux pôles électromagnétiques d'extrémité (13a) de même signe, et un pôle électromagnétique central (13b) de signe opposé qui constitue le noyau bobiné, et en ce que la partie aimantée de chaque organe de sélection (7) est constituée par deux aimants permanents montés en opposition, de telle sorte qu'en commandant le sens du courant dans la bobine (14) du pôle central (13b), on commande le déplacement de l'organe de sélection (7) dans un sens ou dans l'autre, en sorte de l'amener en butée, en position de sélection ou en position de retrait.
- Dispositif selon l'une quelconque des revendications 2 à 4 caractérisé en ce que chaque plaque (2) est équipée d'un connecteur (18) pour l'alimentation des bobines (14), et sert de support à un circuit imprimé (20) reliant chaque bobine (14) au connecteur (18).
- Dispositif selon l'une quelconque des revendications 1 à 5 caractérisé en ce qu'il comprend entre chaque plaque (2), et pour chaque organe de sélection (7), un poussoir (5) séparé, qui est mobile par rapport aux plaques (2), dans le plan des plaques (2) et dans une direction transversale à l'axe de déplacement des organes de sélection (7), et qui peut être verrouillé en position sortie par rapport aux plaques (2), par l'organe de sélection (7) associé, position dans laquelle le poussoir (5) peut venir pousser l'aiguille associée de la mécanique Jacquard lors du déplacement du dispositif.
- Dispositif selon la revendication 6 caractérisé en ce qu'il comprend une plaque de réarmement (21), et en ce que l'ensemble formé par les plaques (2) et les organes de sélection (7) est mobile en translation par rapport à la plaque de réarmement (21), selon l'axe (5e) des poussoirs (5), entre une première position dans laquelle l'ensemble des poussoirs (5) se trouve au contact de la plaque de réarmement (21) et en position sortie, et une seconde position dans laquelle seuls les poussoirs (5) verrouillés en position sortie par rapport aux plaques (2) sont amenés au contact des aiguilles (1) correspondantes de la mécanique Jacquard, les poussoirs (5) non verrouillés en position sortie n'étant pas entraínés et restant au contact de la plaque de réarmement (21).
- Dispositif selon la revendication 6 caractérisé en ce qu'il comprend une plaque de réarmement (21) qui est mobile en translation par rapport aux plaques (2) et aux organes de sélection (7), et selon l'axe (5e) des poussoirs (5), et qui a pour fonction à chaque cycle de la mécanique Jacquard d'amener et de maintenir en position sortie les poussoirs (5) par rapport aux plaques (2), pendant la commande du déplacement des organes de sélection (7).
- Dispositif selon la revendication 8 caractérisé en ce que l'axe (5e) des poussoirs (5) est vertical, et la plaque de réarmement (21) est mobile entre une position basse et une position haute dans laquelle elle supporte tous les poussoirs (5) en position sortie, de telle sorte que les poussoirs qui ne sont pas verrouillés en position sortie par leur organe de sélection (7), retombent sous l'effet de la gravité en position rentrée, lorsque la plaque de réarmement passe de sa position haute à sa position basse.
- Dispositif selon la revendication 8 caractérisé en ce que l'axe des poussoirs est horizontal, et en ce que chaque poussoir comporte un moyen élastique de rappel en position qui se trouve comprimé lorsque chaque poussoir est maintenu en position sortie par la plaque de réarmement, et qui permet de ramener le poussoir en position rentrée, lorsque la plaque de réarmement quitte sa position.
- Dispositif selon l'une quelconque des revendications 7 à 10 caractérisé en ce que les poussoirs (5) sont constitués par des tiges de longueur identique, avec une première extrémité de poussée (5d) destinée à venir au contact d'une aiguille (1), et une seconde extrémité d'armement (5c), qui fait saillie par rapport à la rangée de plaques, et qui est destinée à venir au contact de la plaque de réarmement (21).
- Dispositif selon la revendication 11 caractérisé en ce que les organes de sélection (7) consistent en des languettes plates (9), en ce que dans l'espace entre deux plaques successives (2), tous les poussoirs (5) sont positionnés dans un même plan (5a) parallèle aux plaques, et toutes les languettes (9) sont positionnées dans un même plan (7a) parallèle aux plaques, mais décalé par rapport au plan (5a) des poussoirs (5), en sorte que les poussoirs ne font pas obstacle au déplacement des languettes (9), en ce que chaque poussoir comporte une encoche (5b) pour son blocage en position sortie, et en ce que chaque languette (9) comporte un ergot latéral (10) qui est orienté transversalement au plan à la languette (9), et qui lorsque la languette (9) est amenée en position de sélection vient s'introduire dans l'encoche (5b) du poussoir (5) correspondant afin de le verrouiller en position sortie.
- Mécanique Jacquard équipée d'un dispositif selon l'une quelconque des revendications 1 à 12.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9603834A FR2746422B1 (fr) | 1996-03-22 | 1996-03-22 | Dispositif electromagnetique pour l'actionnement automatise des aiguilles d'une mecanique jacquard |
| FR9603834 | 1996-03-22 | ||
| PCT/FR1997/000437 WO1997036033A1 (fr) | 1996-03-22 | 1997-03-12 | Dispositif electromagnetique pour l'actionnement automatise des aiguilles d'une mecanique jacquard |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0889980A1 EP0889980A1 (fr) | 1999-01-13 |
| EP0889980B1 true EP0889980B1 (fr) | 2000-05-24 |
Family
ID=9490616
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP97914377A Expired - Lifetime EP0889980B1 (fr) | 1996-03-22 | 1997-03-12 | Dispositif electromagnetique pour l'actionnement automatise des aiguilles d'une mecanique jacquard |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US6105628A (fr) |
| EP (1) | EP0889980B1 (fr) |
| JP (1) | JP4194657B2 (fr) |
| CN (1) | CN1070941C (fr) |
| AR (1) | AR006322A1 (fr) |
| AT (1) | ATE193342T1 (fr) |
| AU (1) | AU2164397A (fr) |
| BR (1) | BR9708326A (fr) |
| DE (1) | DE69702128T2 (fr) |
| ES (1) | ES2148950T3 (fr) |
| FR (1) | FR2746422B1 (fr) |
| GR (1) | GR3034139T3 (fr) |
| PT (1) | PT889980E (fr) |
| WO (1) | WO1997036033A1 (fr) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6336477B1 (en) * | 1999-12-10 | 2002-01-08 | Wis Seaming | Frame modules for improved weaving device |
| US6318415B1 (en) * | 1999-12-10 | 2001-11-20 | Wis Seaming Equipment Inc. | Quick release coupling/pulley assembly for improved weaving device |
| US6216748B1 (en) * | 1999-12-10 | 2001-04-17 | Wis Seaming Equipment, Inc. | Pivoting magnet latches for improved weaving device |
| US6216749B1 (en) * | 1999-12-10 | 2001-04-17 | Wis Seaming Equipment, Inc. | Weaving device |
| US20050096594A1 (en) * | 2002-04-30 | 2005-05-05 | Doctor's Research Group, Incorporated | Cannula arrangements |
| US7769427B2 (en) * | 2002-07-16 | 2010-08-03 | Magnetics, Inc. | Apparatus and method for catheter guidance control and imaging |
| US6948530B2 (en) * | 2004-01-02 | 2005-09-27 | Yi-Shan Yao | Weaving machine |
| CN100334277C (zh) * | 2004-07-14 | 2007-08-29 | 喻冬平 | 一种带水平顶杆和立式电磁选针组件的电磁花筒 |
| KR100976929B1 (ko) * | 2008-04-16 | 2010-08-18 | 소진수 | 실공급방법, 경사공급방법, 실공급장치 및 직조방법 |
| CN103956248B (zh) * | 2014-04-01 | 2016-11-23 | 中国科学院宁波材料技术与工程研究所 | 一种电磁驱动装置以及使用该装置的针织横机 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3904855A (en) * | 1973-07-16 | 1975-09-09 | Grosse Webereimaschinen Gmbh | Read-in system for the control of card-punching machine, jacquard machines and the like |
| BE1000884A3 (nl) * | 1987-08-26 | 1989-05-02 | De Vree & Co J | Inrichting voor het vormen van een gaap bij weefmachines. |
| JPH0647020Y2 (ja) * | 1989-02-14 | 1994-11-30 | 株式会社武村製作所 | ジャガード機の製織用針の押動制御装置 |
| DE4113953A1 (de) * | 1991-01-24 | 1992-07-30 | Textilma Ag | Kettenwirkmaschine, insbesondere haekelgallonmaschine |
| DE9306377U1 (de) * | 1993-04-28 | 1993-06-17 | Schleicher, Oskar, 4050 Mönchengladbach | Nadelauswahlvorrichtung für Jaquardmaschinen |
| WO1995006767A1 (fr) * | 1993-09-01 | 1995-03-09 | Maqtex Máquinas Texteis Indústria E Comércio Ltda-Me | Equipement de formation de la foule dans un metier a tisser rectiligne |
-
1996
- 1996-03-22 FR FR9603834A patent/FR2746422B1/fr not_active Expired - Fee Related
-
1997
- 1997-03-12 AU AU21643/97A patent/AU2164397A/en not_active Abandoned
- 1997-03-12 BR BR9708326-7A patent/BR9708326A/pt not_active IP Right Cessation
- 1997-03-12 PT PT97914377T patent/PT889980E/pt unknown
- 1997-03-12 US US09/155,068 patent/US6105628A/en not_active Expired - Fee Related
- 1997-03-12 JP JP53406697A patent/JP4194657B2/ja not_active Expired - Fee Related
- 1997-03-12 CN CN97193906A patent/CN1070941C/zh not_active Expired - Fee Related
- 1997-03-12 EP EP97914377A patent/EP0889980B1/fr not_active Expired - Lifetime
- 1997-03-12 WO PCT/FR1997/000437 patent/WO1997036033A1/fr not_active Ceased
- 1997-03-12 ES ES97914377T patent/ES2148950T3/es not_active Expired - Lifetime
- 1997-03-12 AT AT97914377T patent/ATE193342T1/de not_active IP Right Cessation
- 1997-03-12 DE DE69702128T patent/DE69702128T2/de not_active Expired - Fee Related
- 1997-03-20 AR ARP970101102A patent/AR006322A1/es active IP Right Grant
-
2000
- 2000-08-07 GR GR20000401834T patent/GR3034139T3/el not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| ES2148950T3 (es) | 2000-10-16 |
| FR2746422B1 (fr) | 1998-06-12 |
| AU2164397A (en) | 1997-10-17 |
| DE69702128T2 (de) | 2000-09-21 |
| AR006322A1 (es) | 1999-08-25 |
| HK1019902A1 (en) | 2000-03-03 |
| ATE193342T1 (de) | 2000-06-15 |
| FR2746422A1 (fr) | 1997-09-26 |
| WO1997036033A1 (fr) | 1997-10-02 |
| BR9708326A (pt) | 2000-01-04 |
| CN1216588A (zh) | 1999-05-12 |
| JP2000507316A (ja) | 2000-06-13 |
| US6105628A (en) | 2000-08-22 |
| CN1070941C (zh) | 2001-09-12 |
| JP4194657B2 (ja) | 2008-12-10 |
| PT889980E (pt) | 2000-10-31 |
| GR3034139T3 (en) | 2000-11-30 |
| DE69702128D1 (de) | 2000-06-29 |
| EP0889980A1 (fr) | 1999-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0889980B1 (fr) | Dispositif electromagnetique pour l'actionnement automatise des aiguilles d'une mecanique jacquard | |
| EP0108700B1 (fr) | Mécanique d'armure à sélection perfectionnée des crochets | |
| EP0602538B1 (fr) | Contacteur "reed" et procédé de fabrication de microstructures métalliques tridimensionnelles suspendues | |
| BE1008614A3 (fr) | Frein de trame ameliore pour metier a tisser sans navette. | |
| BE1003729A3 (fr) | Dispositif ameliore de selection et de presentation des fils de trame pour des metiers a tisser a grande vitesse. | |
| FR2476694A1 (fr) | Dispositif perfectionne d'ouverture du pas sur un metier a tisser | |
| FR2587046A1 (fr) | Dispositif de commande des dessins dans les machines textiles | |
| FR2512471A1 (fr) | Machine a tricoter a selection electromagnetique des aiguilles | |
| WO1981002312A1 (fr) | Procede concernant la section de la toile d'une machine a papier et triangle a toile double de mise en oeuvre du procede | |
| CH670464A5 (fr) | ||
| FR2480493A1 (fr) | Relais electromagnetique permettant d'obtenir une pression de contact uniforme, dont les bornes sont integrees par moulage du corps de support, et son procede de fabrication | |
| FR2629480A1 (fr) | Metier a tisser a ratiere | |
| FR2468285A1 (fr) | Procede et appareil pour monter des elements de circuit du type a broches sur une plaquette de circuit imprime | |
| FR2524015A1 (fr) | Dispositif pour inserer des fils de chaine dans des lices a tisser et lamelles appretees | |
| BE556554A (fr) | ||
| CH641852A5 (en) | Knitting machine with electromagnetic needle selection | |
| FR2505552A1 (fr) | Dispositif de commutation de circuits electriques de puissance | |
| EP1697955B1 (fr) | Actionneur electromecanique | |
| CH202517A (fr) | Appareil sélectionneur pour la reproduction de dessins quelconques. | |
| FR2644634A1 (en) | Electromagnetic contactor | |
| FR2675826A1 (fr) | Dispositif pour former la foule dans un metier a tisser. | |
| BE500697A (fr) | ||
| BE424263A (fr) | ||
| BE371678A (fr) | ||
| FR2745592A1 (fr) | Methodes et dispositifs de selection des lisses et metier a tisser incorporant de tels dispositifs |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19980917 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE ES FR GB GR IT LI NL PT |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| 17Q | First examination report despatched |
Effective date: 19990607 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE ES FR GB GR IT LI NL PT |
|
| REF | Corresponds to: |
Ref document number: 193342 Country of ref document: AT Date of ref document: 20000615 Kind code of ref document: T |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20000524 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: BOVARD AG PATENTANWAELTE |
|
| REF | Corresponds to: |
Ref document number: 69702128 Country of ref document: DE Date of ref document: 20000629 |
|
| ITF | It: translation for a ep patent filed | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2148950 Country of ref document: ES Kind code of ref document: T3 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20000727 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20050217 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20050218 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GR Payment date: 20050225 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20050308 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PT Payment date: 20050309 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20050315 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20050418 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060312 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060331 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060331 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060912 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20061001 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20061003 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: MM4A Effective date: 20060912 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 20061001 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: TP |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20070316 Year of fee payment: 11 |
|
| BERE | Be: lapsed |
Owner name: S.A. DENTELLES *DARQUER Effective date: 20060331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20061002 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20080312 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20090326 Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080312 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20090319 Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100312 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20110419 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110404 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100313 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20160311 Year of fee payment: 20 |