EP0776176B1 - Medizinisches diagnose-, behandlungs- und darstellungssystem - Google Patents
Medizinisches diagnose-, behandlungs- und darstellungssystem Download PDFInfo
- Publication number
- EP0776176B1 EP0776176B1 EP95908708A EP95908708A EP0776176B1 EP 0776176 B1 EP0776176 B1 EP 0776176B1 EP 95908708 A EP95908708 A EP 95908708A EP 95908708 A EP95908708 A EP 95908708A EP 0776176 B1 EP0776176 B1 EP 0776176B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- locating system
- sensor
- signals
- catheter
- orientation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000003384 imaging method Methods 0.000 title description 14
- 238000011282 treatment Methods 0.000 title description 6
- 238000003745 diagnosis Methods 0.000 title description 3
- 230000004044 response Effects 0.000 claims abstract description 16
- 238000000034 method Methods 0.000 claims description 45
- 210000002216 heart Anatomy 0.000 claims description 30
- 210000001174 endocardium Anatomy 0.000 claims description 17
- 230000008569 process Effects 0.000 claims description 6
- 238000012546 transfer Methods 0.000 claims description 2
- 238000013507 mapping Methods 0.000 description 37
- 238000010586 diagram Methods 0.000 description 21
- 238000002604 ultrasonography Methods 0.000 description 19
- 239000000523 sample Substances 0.000 description 18
- 206010047302 ventricular tachycardia Diseases 0.000 description 18
- 238000002679 ablation Methods 0.000 description 14
- 230000004913 activation Effects 0.000 description 14
- 238000012545 processing Methods 0.000 description 10
- 230000033001 locomotion Effects 0.000 description 9
- 210000004204 blood vessel Anatomy 0.000 description 8
- 210000000056 organ Anatomy 0.000 description 8
- 210000005242 cardiac chamber Anatomy 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 230000005672 electromagnetic field Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 7
- 210000001519 tissue Anatomy 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 6
- 239000013598 vector Substances 0.000 description 6
- 206010003119 arrhythmia Diseases 0.000 description 5
- 230000000747 cardiac effect Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000033764 rhythmic process Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000006793 arrhythmia Effects 0.000 description 4
- 210000001367 artery Anatomy 0.000 description 4
- 230000010363 phase shift Effects 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 229910052698 phosphorus Inorganic materials 0.000 description 3
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- 210000004556 brain Anatomy 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 230000003205 diastolic effect Effects 0.000 description 2
- 238000002592 echocardiography Methods 0.000 description 2
- 210000001035 gastrointestinal tract Anatomy 0.000 description 2
- 229910052740 iodine Inorganic materials 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 210000004165 myocardium Anatomy 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 230000037361 pathway Effects 0.000 description 2
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 2
- 229910052700 potassium Inorganic materials 0.000 description 2
- 230000002028 premature Effects 0.000 description 2
- 239000000047 product Substances 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 239000000243 solution Substances 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 229910052720 vanadium Inorganic materials 0.000 description 2
- 210000003462 vein Anatomy 0.000 description 2
- 229930091051 Arenine Natural products 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 238000002940 Newton-Raphson method Methods 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000002399 angioplasty Methods 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 238000002052 colonoscopy Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 239000000994 contrast dye Substances 0.000 description 1
- 210000003748 coronary sinus Anatomy 0.000 description 1
- 239000000975 dye Substances 0.000 description 1
- 230000002526 effect on cardiovascular system Effects 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000000004 hemodynamic effect Effects 0.000 description 1
- 238000010348 incorporation Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000005865 ionizing radiation Effects 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 231100000518 lethal Toxicity 0.000 description 1
- 230000001665 lethal effect Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 210000001147 pulmonary artery Anatomy 0.000 description 1
- 210000003102 pulmonary valve Anatomy 0.000 description 1
- 238000004445 quantitative analysis Methods 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 210000005247 right atrial appendage Anatomy 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000002579 sigmoidoscopy Methods 0.000 description 1
- 230000002269 spontaneous effect Effects 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000010561 standard procedure Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 210000003932 urinary bladder Anatomy 0.000 description 1
- 230000002792 vascular Effects 0.000 description 1
- 230000002861 ventricular Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
- A61B5/6859—Catheters with multiple distal splines
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6843—Monitoring or controlling sensor contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00869—Phase
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/367—Correlation of different images or relation of image positions in respect to the body creating a 3D dataset from 2D images using position information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
- A61B2090/3958—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI emitting a signal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/16—Details of sensor housings or probes; Details of structural supports for sensors
- A61B2562/17—Comprising radiolucent components
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
- A61N1/3627—Heart stimulators for treating a mechanical deficiency of the heart, e.g. congestive heart failure or cardiomyopathy
Definitions
- the present invention relates to medical diagnosis, treatment and imaging systems. More particularly, the present invention relates to medical probes whose location can be detected and adjusted and which have an additional detection, imaging and/or treatment function, according to the preamble of claim 1.
- Probes such as catheters, suitable for various medical procedures and internal imaging, are fairly common. Such probes include: balloon angioplasty catheters, catheters with laser-, electrical- or cryo-ablation characteristics, catheters having ultrasound imaging heads, probes used for nearly incisionless-surgery or diagnosis, and endoscopes. Where such probes are used for treatment, the probes must be carefully positioned in relation to the body structure. Even for imaging systems such as ultrasound systems, some positioning capability has been described.
- U.S. Patent No. 5,042,486 to Pfeiller et al. describes a method in which the position of a catheter tip is located using electromagnetic fields. The catheter is introduced and the tip location is followed. The path of the tip is superimposed on the pre-registered image of the blood vessel or the organ, through which the catheter was advanced.
- this technology requires acquisition and processing of images prior to the procedure and involves a highly sophisticated and time-consuming procedure for the correct alignment of the image acquired previous to this procedure, and the orientation and location of the blood vessel or the organ during the catheterization procedure itself.
- U.S. Patent 4,821,731 to Martinelli et al. discloses a method for internal imaging of a living body using ultrasound.
- the position of an ultrasound imaging catheter is determined by computing the relative position of the catheter using the response of an ultrasound transducer to a reference signal and by computing the angular orientation of the catheter about its axis by determining the signal induced in a single coil by substantially perpendicular magnetic fields of different frequencies.
- the ultrasound transducer is also used to send and detect ultrasound signals in a direction perpendicular to the catheter axis. By rotating the catheter and moving it along its axis an ultrasound image may be generated.
- the catheter is also described as being capable of transmitting a laser beam to the end thereof to ablate tissue from lesions on the walls of arteries.
- a catheter which can be located in a patient using an ultrasound transmitter located in the catheter is disclosed in U.S. Patent No. 4,697,595 and in the technical note "Ultrasonically Marked Catheter, a Method for Positive Echographic Catheter Position and Identification", Bryer et al., Medical and Biological Engineering and Computing, May, 1985, pages 268-271. Also, U.S. Patent No. 5,042,486 discloses a catheter which can be located in patients using non-ionizing fields and suitably imposing catheter location on a previously obtained radiological image of the blood vessel.
- PCT Patent Publication WO 94/0938 describes a system using a single-coil type sensor which is coaxial with the long axis of a catheter and which senses fields which are generated by three multicoil generators external to the body of a patient.
- U.S. Patent No. 3,644,825 describes a system which uses the relative motion of a sensor in the determination of its position.
- the relative motion supplies information to the sensing coils needed to identify position and orientation.
- such a solution is not applicable to identifying position and location of the object where there is no relative motion between the object and the reference frame.
- U.S. Patent No. 3,868,565 comprises a tracking system for continuously determining the relative position and orientation of a remote object.
- This tracking system includes orthogonally positioned loops for both a plurality of sensors and a plurality of radiating antennas. With the proper excitation currents to those loops, the radiating antennas generate an electromagnetic field that is radiated from those antennas to the sensor.
- the tracking system operates as a closed loop system where a controlling means measures the field that is received at the sensor at the remote object and feeds the information back to radiating antennas to provide a nutating field radiating as a pointing vector towards the remote object. Accordingly, the pointing vector gives the direction to the sensing antenna from the radiating antenna.
- Kuipers describes in his U.S. Patent No. 4,017,858, an electromagnetic field which rotates about a pointing vector and is used both to track or locate the remote object in addition to determining the relative orientation of the object.
- This system wherein the radiating coils are charged with the properly designed wave forms, generates a magnetic field which, in a closed loop manner, can be fed into processing means to generate the information needed to determine an orientation of a remote object.
- U.S. Patent No. 4,054,881 describes a non-tracking system for determining the position and location of a remote object with respect to a reference frame. This is accomplished by applying electrical signals to each of three mutually-orthogonal, radiating antennas, the electrical signals being multiplexed with respect to each other and containing information characterizing the polarity and magnetic moment of the radiated electromagnetic fields. The radiated fields are detected and measured by the three mutually orthogonal receiving antennas having a known relationship to the remote object, which produce nine parameters. These nine parameters, in combination with one known position or orientation parameter, are sufficient to determine the position and orientation parameters of the receiving antennas with respect to the position and orientation of the radiating antennas.
- U.S. Patent No. 4,849,692 describes a quantitative method for measuring the relative position and orientation of two bodies in the presence of metals. Measuring the position and orientation of receiving antennas with respect to the transmitting antennas is achieved using direct current electromagnetic field signals. Electromagnetic radiation is designed to be transmitted in a sequence by each of the mutually orthogonal radiating antennas. A receiving antenna measures the values of transmitted direct current magnetic fields, one dimension at a time, and those of the earth's magnetic field as well. This method requires repetitive acquisition and computations to determine position and location of remote objects.
- a system which incorporates a catheter which includes a position measuring device which can determine the position of the catheter in three dimensions, but not its orientation.
- this catheter is used to map the electrical activity at the inner walls of the heart and to ablate portions of the heart muscle in response to such mappings.
- the position of the catheter used for the mapping/ablation function is determined with reference to three position detecting devices which are positioned against the inner wall of the heart at three different stable locations to form a reference plane.
- WO-A-90/13259 shows an ultrasound transducer fixed in its axial rotation capability. To generate three-dimensional ultrasound representations knowledge of the transducer position around the axis is not essential. The position is calculated using two sensors and two field induction loops.
- WO-A-92/03090 uses an axial symmetrical catheter wherein the degree of freedom of rotation around its axis is not relevant.
- the coils shown are all axially directed and cannot be used to determine the orientation angle about the axis of the catheter.
- the present invention is defined in independent claims 1 and 30. It concerns a catheter locating means and method that offers quantitative, high resolution locating information that, when assimilated with sensed local information results in a high resolution detailed map of the information. This map may optionally be superimposed on an image or other representation of the organ architecture.
- the locating means preferably generates continuous location and orientation information concerning a remote object, in particular a catheter, relative to a reference frame, in a non-iterative manner.
- One aspect of the present invention relates to the provision of a new six-dimensional positioning apparatus suitable for use with a catheter.
- a plurality of non-concentric coils are placed in a catheter adjacent a locatable site, for example, its distal end.
- the coils preferably have orthogonal axis.
- the relative positioning of the coils differs from that described in the prior art in that the coils are separated in space and are not concentric. These coils generate signals in response to externally applied magnetic fields which allows for the computation of six position and orientation dimensions.
- a second aspect of the present invention is directed toward a new method for computing multi-dimensional position and orientation of a coil system from signals produced by the coils in response to a system of externally applied electromagnetic fields.
- a third aspect of the present invention allows for the mapping of the interior of the heart in a manner similar to that described in the above-referenced patent applications assigned to the assignee of the present application, with the simplification that only a single six-dimensional location/orientation detection sensor is used for reference.
- a fourth aspect of the present invention involves an ultrasonic or other imaging probe having a six-dimensional positioning capability in response to external electromagnetic fields. Use of such a probe obviates the use of ionizing radiation or sonic sensing for position determination and gives ultrasonic or other imaging information whose direction and orientation is completely known.
- a fifth aspect of the invention involves methods and apparatus for adding a controlled change in orientation to a catheter, thereby to allow for maneuvering of the cathode and its easy placement.
- a sixth aspect of the invention utilizes the controlled change in orientation to allow for two or three-dimensional imaging using a non-scanning probe, such as an ultrasound probe or for three-dimensional scanning using a two-dimensional scanning probe.
- a non-scanning probe such as an ultrasound probe or for three-dimensional scanning using a two-dimensional scanning probe.
- one or both of the plurality of field generators or sensors comprises three distinguishable, non-overlapping, generators or sensors.
- each sensor comprises a coil.
- said plurality of coils have axes which intersect within a coil.
- said plurality of coils comprises three coils, said coils preferably have axes which do not all intersect in a point.
- the signal processor cross-correlates the signals corresponding to the drive and sensor signals.
- the fields generated by each of the generators have a different frequency, a different phase, or both a different frequency and a different phase.
- each field generator has a different frequency, preferably frequencies which are each integer multiples of a given frequency.
- the duration of the cross-correlation of the inputs is the minimal common product of the integer multipliers divided by the given frequency.
- the results of the cross-correlation are used to calculate the contribution of each field generator to the signal generated by each said sensor.
- the locating system includes a display system for displaying the position of the point on the invasive medical instrument.
- the locating system further comprises a reference instrument which includes a plurality of additional non-overlapping sensors situated in a reference instrument which sensors generate sensor sighals in response to said fields, wherein said display system displays the position of the portion on the invasive medical instrument relative to the position of a point on the reference instrument.
- the reference instrument is an invasive medical instrument.
- the sensors are situated proximate the distal end of the reference invasive medical instrument.
- the locating system includes an additional sensor on a portion of the invasive medical instrument which senses a local condition.
- the additional sensor senses local electrical signals, for example electrical signals from the endocardium of the patient's heart, and transfers them to terminals external to the patient's body.
- the signal processor processes the position and orientation coordinate signals and the local electrical signals acquired at a plurality of points on the endocardium to generate a map that represents the propagation of electrical signals through tissue in the patient's body.
- the additional sensor supplies electrical energy to the endocardium for ablating a portion of the endocardium.
- the locating system includes an electrode adapted for supplying electrical energy to the endocardium for ablating a portion of the endocardium.
- the additional sensor is an ultrasonic transmitter/receiver.
- the ultrasonic transmitter/receiver provides a less than three dimensional representation of the acoustic properties of tissue beyond the distal end.
- the distal end is deflectable.
- the system includes image reconstruction circuitry which receives a plurality of said less than three dimensional representations acquired at different orientations of the distal end and produces a three dimensional map of the acoustic properties of tissue at least partially surrounding the distal end.
- the invasive medical instrument may be, for example, a catheter or endoscope, comprising a plurality of magnetic field sensors, preferably coils, proximate the distal end thereof.
- the plurality of coils have axes which intersect within a coil. Where the plurality is three, the said coils have axes which do not all intersect in a point.
- the instrument comprises an ultrasound transducer at said distal end.
- the ultrasound transducer provides a representation, preferably a one or two dimensional representation, of the acoustic properties of tissue beyond and along the axis of the catheter.
- the instrument further comprises an electrical probe at said distal end.
- the probe is preferably adapted to sense electrical signals generated by tissue which is in contact and conduct said signals to the proximal end of the catheter and/or to supply an ablative electrical signal to tissue contacting said terminal.
- the instrument includes a sensor for measuring local chemistry at the distal end.
- the instrument includes means for changing the orientation of the distal end.
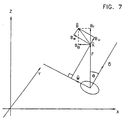
- FIG. 1 shows a pictorial representation of a basic preferred application of the invention to the human body.
- a catheter 10 is inserted into an artery 11 of a patient using standard techniques.
- Catheter 10 comprises a body 12, a locating sensor 14 and an active portion 16 at the distal end 15 of the catheter.
- the active portion 16 in accordance with various preferred embodiments of the invention, may include an electrical sensor, an ultrasound head, a fiber optic viewing head, an electrical stimulator, an electrical or laser ablator, an ionic sensor, an oxygen or carbon dioxide sensor, an accelerometer, a blood pressure or temperature sensor or a cryogenic probe.
- the catheter will include leads, light guides, wave guides, etc. for energizing the active portion in response to commands of an operator.
- the locating sensor 14 comprises two or three antennas, for example coils which are irradiated by two or three radiators 18, 20 and 22, which are outside the body surface 23 of the patient.
- the radiators useful in a medical application comprise wound annular coils from about 2 to 20 cm in diameter (O.D.) and from about 0.5 to 2 cm thick, in a coplanar, triangular arrangement where the centers of the coils are from about 2 to 30 cm apart. Bar-shaped radiators or even triangular or square-shaped coils could also be useful for such medical applications.
- the radiators are preferably positioned in or below the surface upon which the patient is resting, substantially directly below the portion of the patient's body where a procedure is being performed. In other applications, the radiators may be fairly close to the skin of the patient.
- the three radiators are driven by a radiator driver 24, preferably in a manner described below, and the signals received by the receiving antennas are amplified and processed, together with a representation of the signals used to drive radiators 18, 20 and 22, preferably in the manner described below, in a signal processor 26 to provide a display or other indication of the position and orientation of the distal end 15 on a monitor 27.
- Radiators 18, 20 and 22 may be arranged in any convenient position and orientation, so long as they are fixed in respect to some reference frame, and so long as the radiators are non-overlapping, that is, there are no two radiators with the exact, identical location and orientation.
- radiator driver 24 When driven by radiator driver 24, the radiators generate a multiplicity of distinguishable AC magnetic fields that form the magnetic field sensed by receiving antennas in the locating sensor.
- the magnetic fields are distinguishable with regard to the frequency, phase, or both frequency and phase of the signals in the respective magnetic fields. Time multiplexing is also possible.
- the active end of the catheter may be used to gather information, such as ultrasound echo information, electrical activity information etc., and optionally to perform certain procedures on the arteries (or veins) or within an organ chamber 28 to which the artery (or vein) leads.
- organ chambers are the chambers of the heart, brain or gastrointestinal tract. It is a particular object of some aspects of the present invention to more accurately map the electrical activity of the heart and to more accurately image the walls of the heart, as will be described in more detail below.
- Fig. 2 shows a schematic illustration of a preferred embodiment of the distal end of catheter 10.
- a graphic illustration of locating sensor 14 is shown in Fig. 3.
- Sensor 14 preferably includes two or more and more preferably three sensor coils 30, 32 and 34 wound on air cores.
- the coils have mutually orthogonal axes, one of which is conveniently aligned with the long axis of the catheter.
- the coils of the preferred embodiment of the invention are closely spaced along the axis of the catheter to reduce the diameter of the locating sensor and thus make the sensor suitable for incorporation into a catheter.
- the present invention quantitative measurement of the position and orientation of the catheter distal end relative to a reference frame is necessary.
- This requires at least two non-overlapping radiators that generate at least two distinguishable AC magnetic fields, the radiators' respective positions and orientations relative to the reference frame being known; a radiator driver which preferably continuously supplies the radiators with AC signals to generate the AC magnetic fields; and a location sensor, consisting of at least two non-parallel sensors to measure the magnetic field flux resulting from the at least two distinguishable magnetic fields.
- the number of radiators times the number of sensors is equal to or greater than the number of degrees of freedom of the desired quantitative measurement of the position and orientation of the sensors relative to the reference frame.
- the six position and orientation coordinates of the distal tip of the catheter are determined, at least two coils are required in location sensor 14. Preferably three coils are used to improve the accuracy and reliability of the position measurement.
- Leads 36 are used to carry signals detected by the sensor coils to signal processor, via the proximal end of the catheter, for processing to generate the required position information.
- leads 36 are twisted pairs to reduce pick-up and may be further electrically shielded.
- coils 30, 32 and 34 have an inner diameter of 0.5 mm and have 800 turns of 16 micrometer diameter to give an overall coil diameter of 1-1.2 mm.
- the effective capture area of the coil is preferably about 400 mm 2 . It will be understood that these dimensions may vary over a considerable range and are only representative of a preferred range of dimensions. In particular, the size of the coils could be as small as 0.3 mm (with some loss of sensitivity) and as large as 2 or more mm.
- the wire size can range from 10-31 micrometers and the number of turns between 300 and 2600, depending on the maximum allowable size and the wire diameter.
- the effective capture area should be made as large as feasible, consistent with the overall size requirements. While the preferred sensor coil shape is cylindrical, other shapes can also be used. For example a barrel shaped coil can have more turns than a cylindrical shaped coil for the same diameter of catheter. Also, square or other shaped coils may be useful depending on the geometry of the catheter.
- Leads 38 are used to power active portion 16 and/or to receive signals therefrom.
- the nature of leads 38 which may vary and may, for example, include an optical waveguide or other transmission media as appropriate to their task.
- an electrode located on the distal tip of the catheter records local cardiac electrical activity, for example, on the endocardium.
- ECG's local electrograms
- the amplified ECG signals are transferred to the control system that presents to the physician the local electrogram morphology acquired from the site whose location was determined at the same time.
- Figure 4 is a block diagram of preferred circuitry used in computing the position of locating sensor 14.
- three radiators 18, 20 and 22 and three sensor coils 30, 32 and 34 are used.
- Radiator driver 24 provides distinguishable, simultaneous AC current signals to each radiator.
- Control circuitry 40 utilizes D/A convertors 42, 44 and 46 to generate three sine waves of three different frequencies, f 1 , f 2 and f 3 , which are output separately to signal amplifiers 48, 50 and 52.
- the ratio between frequencies should be a rational number.
- the radiating driver amplifier output signals are delivered to the radiators through current sensitive circuitry 54, 56 and 58, such as a resistor, loop or more sophisticated circuitry as is known in the art.
- the current-sensitive circuitry produces an output which represents the amplitude and phase of the driving signal for the radiators and which is passed to signal processor 26.
- the three radiators will generate a magnetic field composed of three differently oriented field components each having a different known frequency.
- Each of these field components will be sensed by each of sensor coils 30, 32 and 34 which will each produce a signal composed of three frequency components having different amplitudes and phases depending on the relative distance and orientation of the particular sensor coil and particular radiator which radiates a particular frequency.
- the outputs signals of sensors 30, 32 and 34 are amplified in amplifiers 60, 62 and 64 respectively and passed on to signal processor 26.
- Fig. 5 shows in expanded detail the basic flow chart representing a control sequence and its application to the circuitry of Fig. 4.
- the frequencies of the three sine waves, the physical position and orientation of radiators 18, 20 and 22 in respect to a reference frame, the properties of the radiators and sensors and the coordinates of a single point in the mapping field are defined.
- Sine waves having respective frequencies f 1 , f 2 and f 3 are synthesized as indicated by block 68, for example in control 40.
- These generated frequencies are transmitted, preferably continuously, by radiators 18, 20 and 22 as indicated by block 70 and as described above with reference to Fig. 4.
- the control sequence enters a timing loop 72 that periodically sends signals to activate the signal processor to cross-correlate the coil sensor signals with the radiated signals and to calculate the orientation and position of locating sensor 14 relative to the reference frame.
- Fig. 6 is a functional block diagram of signal processor 26.
- the inputs to the processing block are the signals from amplifiers 60, 62 and 64 (the sensor coil signals) denoted by SIG and inputs from current sensing circuits 52, 56 and 58 denoted as CUR.
- the six input signals are converted from analog to digital signals by an array of A/D converters 74.
- the sampled digital signals are passed to the "calculate cross correlation" block 76, which may consist of dedicated circuitry or which may be performed by a dedicated or shared microprocessor.
- the cross correlation elements can be calculated using the following method:
- a preferred ratio of f 1 , f 2 and F 3 is 1, 2, 3 and preferred frequencies are 1, 2 and 3 kHz.
- the useful frequency range is believed to lie between 50 Hz and 50 kHz.
- the calculation of the fields and currents can also be performed using either dedicated circuitry or a dedicated or shared microprocessor.
- ⁇ 90° B s,c -
- the magnetic field for every possible location and orientation of the sensor in the mappable space can be obtained by using:
- each field generator is used to solve a set of field equations, which are dependent upon the field form. Solving these equation sets produces the location and orientation of the remote sensors, most preferably simultaneously.
- the field equations are derived specifically for each embodiment and are dependent on the geometry and characteristics of the radiators.
- the field equations can be described as follows:
- P 1 / n (X) is a generalized Legendre Polynomial of degree n, and calculated by:
- V ⁇ The remote sensor orientation
- B V B( P , O , I, K , V ) where K and V ⁇ are the unknown variables, and O ⁇ , P and I are the known variables for any given coil.
- each radiator there are three radiators; therefore there will be three known values of P and three known values of O ⁇ .
- the three sensors have a fixed and known location and orientation in the remote object reference frame. For each position and orientation of the remote object, one can compute the location and orientation of each sensor in the radiator reference frame and therefore compute the field sensed, B v , for each radiator and each sensor.
- B v the field sensed
- each field sensed by each sensor from every radiator is measured and the field equations are solved to obtain the location and orientation of the remote object (x, y, z, ⁇ , ⁇ ,and ⁇ ).
- the nine sensor readings (B s,c ) are the measured quantity, and by solving this overdetermined system of equations (using a variety of known numerical methods such as the Newton-Raphson method for non-linear systems of equations or Multidimensional Secant Methods, specifically Broyden's method), the location and orientation of location sensor 14 is determined.
- a description of several possible numerical methods for solving such a set of equations is found in William H. Press et al, "Numerical Recipes in C. The Art of Scientific Computing", second edition, Cambridge University Press, 1992. The location sensor position and orientation are displayed on monitor 27.
- An ECG monitor may be used to synchronize the acquisition of the signals from the sensor coils so as to remove cardiac motion artifacts from the position information.
- a reference sensor may be attached to a portion of an organ being tested or treated, such as the heart, which will be used to correct for breathing motion or patient movement. In this way, the acquired sensor positions may be referenced to the organ structure and not to an absolute outside reference frame, which is less significant.
- Fig. 8 is a schematic of one analog based embodiment of signal processor 26.
- three sine and three cosine wave signals of frequency f 1 , f 2 , and f 3 are used in addition to the SIG and CUR signals used in the embodiment of Fig. 6.
- the SIG and CUR signals are filtered by 12 phase sensitive filters (correlators) 80, such as are shown in Fig. 9 to produce signals indicative of the sine and cosine components of the SIG and CUR signals.
- Fig. 9 shows the expanded view of one possible embodiment of one of the analog filter elements of Fig. 8.
- Each analog filter unit has three inputs; a cosine wave cos(2 ⁇ f c ) , a sine wave sin(2 ⁇ f c ) , and the signal, either one of SIG s or CUR s from which the frequency component f c is to be extracted.
- the signal is multiplied by sin(2 ⁇ f c ) and cos(2 ⁇ f c ) in multipliers 84 and 86.
- the results are passed through low pass filters 88 and 90 to obtain the desired components of the signal.
- a remote object will have more than one set of sensors, preferably from 2 to 6 sets of sensors, that will provide sufficient parameters to determine the shape and/or configuration of a remote object, preferably relative to a reference frame.
- the catheter has additional sets of sensors located proximal to its distal tip, it would be possible to determine the shape and/or configuration of portions of the catheter.
- another invasive procedure such as a sigmoidoscopy or colonoscopy, it may be possible to determine the shape and/or configuration of some or all of the scope used.
- the controller is a simple off-the-shelf 486 IBM compatible computer.
- the A/D boards are commercially available and have the characteristic of being able to sample at least 8 channels with a sampling frequency of between 500 - 40,000 samples per second on each channel.
- An example of such an A/D Board is the National Instruments AT-MIO-16X that is available from National Instruments, Texas, USA.
- the D/A function is achieved using commercially available 8-21 bit resolution D/A boards. Examples of such a D/A are the National Instruments A/D,D/A Board AT-MIO-16X or National Instruments DSP model AT-DS2200.
- the radiation driver amplifiers are commercially available, with 2-16 ohms output impedance and an output power of 60-500 watts.
- An example of such amplifiers is the Inkel amplifier type NA-420, from Inkel of Seoul, Korea.
- the radiators are also commercially available and have the following characteristics: 1-6 cm radius, 0.5-3 cm thickness, and 100-500 turns made of copper wire of diameter 0.1 -0.95 mm.
- a specific example of such a coil could be coils having a 4 cm radius, 1 cm thickness with 151 turns of copper wire of 0.41 mm diameter.
- sensors may be suitable for some applications, such as Hall effect sensors, for example those available from Allegro Micro Systems, Inc., USA or magneto-resistor sensors, sensors, flux gate magnetic sensors, and/or other magnetic flux sensors.
- Hall effect sensors for example those available from Allegro Micro Systems, Inc., USA or magneto-resistor sensors, sensors, flux gate magnetic sensors, and/or other magnetic flux sensors.
- Controller 40 represents an assemblage of units to perform intended functions. For example, such units may receive information or signals, process information, function as a controller, display information, and/or generate information or signals. Typically controller 40 may comprise one or more microprocessors.
- active portion 16 of catheter 10 is a forward looking ultrasound send/receive transducer.
- a transducer can give a one-dimensional map of the acoustic properties of the material lying in front of it by radiating a focused beam of pulsed acoustic energy and then measuring the echoes of the beam reflected by changes in acoustic properties along the path of the beam.
- a focal beam of pulsed acoustic energy can be used to measure the echoes of the beam reflected by changes in acoustic properties along the path of the beam.
- such a steerable, one dimensional acoustic transducer can be used to map the heart walls or blood vessels, ultrasonically, from inside the heart.
- a transducer When coupled with a reference location sensor at a reference point on the heart and ECG gating of the acoustic pulses, such a transducer can generate the information required to form a three dimensional image of the heart or blood vessels or any other organ, at one or several different phases of the heart cycle.
- Figs. 10A-10D The principle of two preferred embodiments of a steering mechanism are shown in Figs. 10A-10D and 11 respectively.
- Fig. 10A shows a steering mechanism 92 that fits into the distal end of a catheter and comprises two steering wires 94 attached to a steering head 96.
- Head 96 is formed of a relatively flexible material such as stainless steel and is slit along its axis, each side of the split being attached to one of wires 94.
- Such a head may be manufactured by attaching two wires (94) at their end and then flattening the wires to form a more easily bent structure.
- a relatively rigid housing containing locating sensor 14 and active portion 16 which, in the present preferred embodiment, is an ultrasonic send/receive transducer.
- active portion 16 which, in the present preferred embodiment, is an ultrasonic send/receive transducer.
- At least head 96 and wires 94 are encased in a catheter sheath 104 which is not shown in Figs. 10A-10C for clarity of presentation.
- This steering mechanism can also be used for other active portion types such as for electropysiologic mapping procedures and for improved steering of catheters or many types, with or without location sensing.
- Fig. 10B one of wires 94 has been shortened as compared with the other wire. Since the catheter sheath holds the wires together, the result of such shortening of one wire is bending of the head, which is facilitated by the axial slit. Locating sensor 14 and active portion 16 are rigidly attached so that measurement of position and orientation of the locating sensor will give the position and orientation of the active portion (ultrasound transducer). By varying the angle of bending and rotating the catheter, imaging over nearly 360° image can be achieved. Additionally or alternatively, as shown in Fig. 10C, the amount of rotation can be reduced by shortening the other wire and which causes bending in the other direction. Slight motion of the transducer can be corrected by a simple translation of the acquired one dimensional image associated with the particular position.
- Fig. 10D shows a mechanism 98 placed at the proximal end of the catheter for changing the relative lengths of wires 94.
- a handle 100 comprises a housing 102 to which catheter sheath 104 is attached.
- the proximal end of wires 94 are formed in a loop (for example by welding the ends of the wire) and wrapped around a spindle 106 which is preferably fixed and which forms a frictional contact with the wires.
- a lever 108 is rotatably attached near its center at a pin 110 to the housing and is attached at one end to wire 94 and at the other end to a slider 112 which is slidable parallel to the housing. When the slider is moved, one of the wires 94 at the distal end is lengthened with respect to the other.
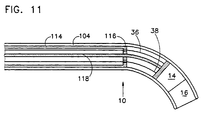
- Fig. 11 shows the distal end of a catheter having an alternative steering mechanism.
- a relative rigid sleeve 114 is placed within cathode sheath 104.
- Sleeve 114 can be axially displaced relative to the sheath from the proximal end of the catheter.
- sleeve 104 The distal end of sleeve 104 is formed with a disk 116 through which a relatively less rigid wire 118 passes.
- Wire 118 is formed with a permanent bend near its distal end at which end, position sensor 14 and active portion 16 are attached. Axial movement of sleeve 104 straightens wire 118 resulting in a change in orientation of both the position sensor and the active portion. If wire 118 is sited off axis, then rotating the wire will rotate the catheter.
- steering of acoustic beams may also be achieved by a moving mirror or by a phased array ultrasonic transducer, and that such a mirror or other arrangement may be present in the active portion.
- Such active scanning may supplement or replace the passive steering provided by the mechanisms of Figs. 10 and 11.
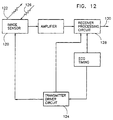
- Fig. 12 shows a simplified system block diagram of ultrasonic acquisition and image formation in accordance with a preferred embodiment of the invention.
- An image sensor 120 such as the ultrasound sensor described above, transmits an acoustic pulse 122 in response to a signal received from a transmitter driver circuit 124.
- An acoustic echo 126 (generally comprising several echoes) is received by the image sensor which produces an echo signal, which when amplified, is sent to a receiver processing circuit 128 which generates a one dimensional "image" at its output 130.
- Information identifying the heart phase of the image may also be present at output 130 which may comprise a plurality of output ports.
- the acquisition of the image is made in response to signals received from an ECG monitor 132. This allows for acquisition of images at a particular portion of the heart cycle so that the various one-dimensional images can be easily reconstructed into a three dimensional image.
- the most significant echo is used as the measure of the distance from the ultrasonic sensor to the chamber along the measurement direction of the sensor, then the collection of such distances (referenced to a reference point in the chamber) will allow the reconstruction of the surface morphology.
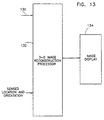
- Fig. 13 shows a simplified block diagram of a three dimensional image reconstruction system which utilizes a series of one dimensional images generated by the circuitry of Fig. 12 and continuous sensed location and orientation information generated by the position locator and its associated circuitry as described above. In general it is useful to acquire the sensed location and orientation to coincide with the acquisition of each one-dimensional image.
- One of the various methods described above for steering the distal tip of the catheter is used to acquire a plurality of one dimensional images with a plurality of orientations.
- An automatic mechanism may be used to continuously change the orientation of the imaging head in accordance with the principles of Figs. 10 and 11 and to rotate the catheter so that operator intervention is not required.
- An image reconstruction processor 132 orients and references the individual one dimensional images in accordance with the sensed location and orientation information and forms a 3-D image which can be presented on an image display 13 either in the form of a series of two dimensional slices or a full three dimensional reconstruction.
- the image displayed may be a cine image of the reconstruction.
- a two dimensional image is acquired by the ultrasound sensor which can be a phased array of acoustic crystals of a single crystal in conjunction with a mirror rotating about an axis that deflects the ultrasonic beam in a predetermined path.
- active portion 16 comprises a sensor for sensing electrical signals generated at selectable positions on the heart. As described below, such sensings of electrical signals can be used to map the electrical activity of the heart.
- the active portion may also include an electrode useful for pacing the heart and/or for ablating a portion of the heart. Such ablation is especially useful in the treatment of the most common lethal cardiac arrhythmia, ventricular tachycardia (VT), i.e., very rapid and ineffectual contractions of the heart muscle. VT is the cause of death of approximately 300,000 people annually. It is also useful in the treatment of other arrhythmias.
- VT ventricular tachycardia
- FIG. 14 A catheter useful for electrical mapping of the heart/ablation is shown schematically in Fig. 14.
- Active portion 16 comprises a conducting tip, preferably of platinum, having a length of between 1-12 mm, preferably about 2 mm.
- the tip is connected via a tip electrode lead-in wire 138 to a switch at the proximal end of the cathode which switches the tip to a source of voltage for pacing or/ablating or to a detector for detecting electrical signals generated by the heart.
- a conducting ring electrode 136 is placed, proximal to locating sensor 14, on the outside of catheter sheath 104 and is connected to ground or to a recorder via a return lead 140.
- a 1-10 ma pulse is applied between tip 16 and ring electrode 136.
- When used for ablation RF energy at about 0.5 MHz and 10-100 V is applied for 10-200 sec.
- Locating sensor 14 is rigidly attached to the tip and the sensor and tip may be manipulated by an eccentric wire 142.
- the twisted wire leads are preferably shielded by a shield 144 to reduce pickup from the relatively high voltages carried by leads 138 and 140.
- an electrically insulating heat shield 146 is placed between the tip and the locating sensor.
- Fig. 15 is a schematic block diagram for acquiring a basic electrocardiogram map in accordance with a preferred embodiment of the invention.
- a transesophageal echocardiograph in the preferred embodiment, a multiplane image of the heart chambers is acquired prior to the mapping study. The image is acquired only during a fiducial point in time during the cardiac cycle. In the preferred embodiment, the image is acquired at end-diastole in response to an end diastole synch-signal. A three-dimensional image of the heart chambers is reconstructed indicating the endocardial morphology and the location of one or more reference catheters within the heart chamber.
- This image can be acquired by a 3-D transesophogal ultrasound image, by a CT scanner, by an MRI scanner or by other imaging techniques.
- the image can also be constructed by touching the catheter to the surface of the chamber (endocardium) in a number of places and measuring the positions. These points can then be used to describe a thee dimensionsional surface which represents the chamber surface.
- reference locatable catheters were placed at three positions in the heart to form a reference plane against which the position of the active catheter was referenced.
- these reference locatable catheters were placed, for example, in the right ventricular apex, the right atrial appendage, and the pulmonary artery at the level of the pulmonary valve, respectively.
- a reference catheter having a location sensor 14 as described hereinabove is used for reference purposes, only a single sensor is required to define the relative location and orientation of the mapping catheter. While any of these locations can be used, it is presently preferred to place the reference sensor in the distal coronary sinus.
- Fig. 16 is a schematic block diagram for illustrating the computerized endocardial activation mapping algorithm (used during sinus rhythm mapping and during ventricular tachycardia mapping).
- a visible or audible indicator preferably indicates the beginning of a data point acquisition. Both electrical activity and location/orientation data are acquired for each point in the map.
- the acquisition of catheter location information is shown in left branch of the block diagram of Fig. 16.
- the mapper electrode is in steady and stable contact with the endocardium. Stable contact is determined by measuring the stability of the location reading, the stability of the sensed electrograms and the impedance of the contact.
- the position and orientation of the locating sensor in the mapping catheter are determined continuously in accordance with the method described above and are saved in response to an end diastole synch signal.
- the mapper catheter tip is localized relative to the reference catheter by finding the difference in each of the six dimensions of the location and orientation.
- the orientation of the mapper cathode is not required, however, it must be acquired to properly transform its location and orientation to an internal heart coordinate system.
- the activation time of the heart at the mapper cathode tip is determined as shown on the right side of Fig. 16.
- the local activation time is then defined with reference to the activation time measured by an ECG terminal on the skin of the patient.
- the process of data acquisition can be terminated by the user, or can be evaluated by an "evaluate activation map” algorithm described below, that examines the already acquired activation map for the density of information relative to the spatial gradient of activation times.
- This algorithm can indicate the next preferable site for activation time detection. The catheter is moved by the user to the new site, and the process of mapping continues.
- VT a data point is determined about every 4 to 6 heart beats. Thus, approximately 15 to 25, typically about 20, data points can be determined each minute.
- Fig. 17 is a schematic block diagram for illustrating the computerized pace mapping algorithm.
- a visible or audible indicator indicates the beginning of a data point acquisition. Acquisition of position information is similar to that for Fig. 16 except that the average mapper location in the previous n heartbeats (n is the moving average window duration) is calculated.
- Fig. 17 shows the determination of the ACI (AutoCorelation Index) in a pace mapping mode.
- an ECG processor acquires ECG data while the patient's heart is paced by an external source at a rate similar to the patient's arrhythmia cycle length.
- the ECG data is also acquired from the body surface electrograms, and the signals are stored as a segment of ECG with a length of several cycles.
- the signal acquired is subjected to automatic comparison with the patient's own VT signal (see Fig. 18).
- the comparison between arrhythmia morphology and paced morphology is performed in two stages: First, the phase shift between the template VT signal and the paced ECG morphology is estimated using minimal error or maximal cross-correlation for two signals. Then, using this phase shift estimated from an index ECG channel, the similarity of the VT and the Raced ECG morphology is measured as the average of the cross-correlation or the square error of the two signals of all channels recorded.
- This two-stage calculation is repeated each time using a different ECG channel as the index channel for determining the phase shift.
- Fig. 18 is a schematic block diagram illustrating an algorithm used to calculate the cross-correlation index while pace-mapping in accordance with a preferred embodiment of the invention.
- Body surface ECG data is acquired at two stages. First, during spontaneous or pacing induced VT, and second, during pacing the endocardium at different sites.
- the ECG data acquired during VT are signal averaged, and a template is constructed (T ch , for each channel recorded).
- T ch for each channel recorded.
- N the same number of beats
- the algorithm calculates the phase shift between P ch and Tch, which yields for the first channel the maximal cross-correlation.
- This time shift is used to shift the remaining channels and calculate for them the cross-correlation. All cross-correlations for all channels are summarized and stored. The algorithm then uses the next channel recorded to calculate the time shift that will cause maximal cross-correlation in this channel. Now this time shift is applied for all cross-correlations between P ch and T ch , and again all cross-correlations are summarized. This procedure is repeated for all channels, and the maximal cross-correlation achieved is used as the value of the cross-correlation of the T ch and the P ch at this site on the endocardium.
- FIG. 19 is a schematic block diagram for illustrating the output configuration of the present embodiment.
- a quasi-static picture of the heart chambers is presented as 3-D reconstruction of a basic image acquired prior to or during the study as previously described. Superimposed on the image is the location of the mapping/ablation catheter (corrected for the movement of the reference catheter) and the current and previous information acquired from the mapping study. This information may include, when appropriate, the activation times (presented using a color code at each acquisition site) or cross-correlation index (ACI) for each point in the pace map.
- the map can represent in the color coding the duration of the local electrograms, the presence of fragmented activity as well as various other variables calculated by the electrophysiologic processor.
- the catheter may be replaced by a needle whose tip is the locatable sensor port.
- electrographic maps of the heart are also possible. By use of variables determined from paced or non-paced acquisitions of electrographic data, the following additional maps can be generated:
- the sites where VT was terminated by a non-captured premature stimulus can be presented.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Pulmonology (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Robotics (AREA)
- Cardiology (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Radiology & Medical Imaging (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Endoscopes (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Electrotherapy Devices (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Surgical Instruments (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Laser Surgery Devices (AREA)
Claims (33)
- Ortungssystem zum Bestimmen des Ortes und der Ausrichtung eines invasiven medizinischen Instrumentes (10) relativ zu einem Referenzrahmen, mit:einer Vielzahl von Feldgeneratoren (18, 20, 22), die bekannte unterscheidbare Felder in Antwort auf Treibersignale erzeugen;einer Vielzahl von Sensoren (14), die sich in dem invasiven medizinischen Instrument (10) nahe dessen distalem Ende (15) befinden, die Sensorsignale in Antwort auf die Felder erzeugen; undeinem Signalprozessor (26), der einen Eingang für eine Vielzahl von Signalen entsprechend den Treibersignalen und den Sensorsignalen hat, dadurch gekennzeichnet, daß der Signalprozessor (22) so angeordnet ist, daß er drei Ortskoordinaten und drei Ausrichtungskoordinaten eines Abschnittes (16) des invasiven medizinischen Instrumentes (10) in Antwort auf die Treiber- und Sensorsignale berechnet.
- Ortungssystem nach Anspruch 1, bei dem einer aus der Vielzahl der Feldgeneratoren (18, 20, 22) oder Sensoren (14) drei unterscheidbare, nicht überlappende Generatoren oder Sensoren aufweist.
- Ortungssystem nach Anspruch 1, bei dein die Vielzahl der Feldgeneratoren (18, 20, 22) drei unterscheidbare, nicht überlappende Generatoren aufweist und die Vielzahl der Sensoren drei unterscheidbare nicht überlappende Sensoren aufweist.
- Ortungssystem nach einem der Ansprüche 1 bis 3, bei dem jeder Sensor (14) eine Spule (30, 32, 34) aufweist.
- Ortungssystem nach Anspruch 4, bei dem die Vielzahl der Spulen (30, 32, 34) Achsen hat, die sich innerhalb einer der Spulen (30, 32, 34) schneiden.
- Ortungssystem nach Anspruch 4 oder Anspruch 5, bei dem die Vielzahl der Spulen (30, 32, 34) drei Spulen aufweist und bei dem die Spulen (30, 32, 34) Achsen haben, die sich nicht alle in einem Punkt schneiden.
- Ortungssystem nach einem der vorangehenden Ansprüche, bei dem die Felder, die von jedem der Feldgeneratoren (18, 20, 22) erzeugt werden, eine unterschiedliche Frequenz, eine unterschiedliche Phase oder sowohl eine unterschiedliche Frequenz als auch eine unterschiedliche Phase haben.
- Ortungssystem nach einem der vorangehenden Ansprüche, bei dem das Feld, das von jedem Feldgenerator (18, 20, 22) erzeugt wird, eine unterschiedliche Frequenz hat.
- Ortungssystem nach Anspruch 8, bei dem die Frequenzen des Feldgenerators (18, 20, 22) jede ganzzahlige Vielfache einer gegebenen Frequenz sind.
- Ortungssystem nach einem der Ansprüche 7 bis 9, bei dem der Signalprozessor (26) die Signale, die den Treiber- und Sensorsignalen entsprechen, kreuzkorreliert.
- Ortungssystem nach Anspruch 9, bei dem der Signalprozessor (26) die Signale, die den Treiber- und Sensorsignalen entsprechen, kreuzkorreliert, und bei dem die Dauer der Kreuzkorrelation der Eingaben das kleinste gemeinsame Vielfache der ganzzahligen Multiplikatoren ist, dividiert durch die gegebene Frequenz.
- Ortungssystem nach Anspruch 10 oder Anspruch 11, bei dem die Ergebnisse der Kreuzkorrelation benutzt werden, um den Beitrag jedes Feldgenerators (18, 20, 22) zum Signal, das von jedem Sensor erzeugt wird, berechnet.
- Ortungssystem nach einem der vorangehenden Ansprüche, bei dem die Felder Wechselstrom-Magnetfelder sind.
- Ortungssystem nach Anspruch 13, bei dem die Wechselstrom-Magnetfelder kontinuierliche Felder sind.
- Ortungssystem nach einem der vorangehenden Ansprüche und mit einem Anzeigesystem (27) zum Anzeigen der Position des Abschnittes (16) auf dem invasiven medizinische Instrument (10).
- Ortungssystem nach einem der vorangehenden Ansprüche, bei dem es einen zusätzlichen Sensor auf dem Abschnitt (16) des invasiven medizinischen Instrumentes (10) gibt, der eine lokale Bedingung abfühlt.
- Ortungssystem nach Anspruch 16, bei dem der zusätzliche Sensor lokale elektrische Signale abfühlt und sie an Anschlüsse außerhalb des Körpers des Patienten überträgt.
- Ortungssystem nach Anspruch 17, bei dem die lokalen elektrischen Signale elektrische Signale vom Endocardium des Herzen des Patienten sind.
- Ortungssystem nach Anspruch 18, bei dem der Signalprozessor (26) die Position und Ausrichtungskoordinatensignale und die lokalen elektrischen Signale, die an einer Vielzahl von Punkten auf dem Endocardium erfaßt worden sind, verarbeitet, um eine Abbildung zu erzeugen, die die Fortpflanzung elektrischer Signale durch das Gewebe in dem Körper des Patienten darstellt.
- Ortungssystem nach einem der Ansprüche 16 bis 19 bei dem der zusätzliche Sensor so arbeitet, daß elektrische Energie an das Endocardium zum Abtragen eines Teils des Endocardiums geliefert wird.
- Ortungssystem nach einem der Ansprüche 1 bis 16 und mit einer Elektrode, die zum Zuführen elektrischer Energie an das Endocardium zum Abtragen eines Teiles des Endocardiums ausgelegt ist.
- Ortungssystem nach Anspruch 16, bei dem der zusätzliche Sensor ein Ultraschall-Sender/Empfänger ist.
- Ortungssystem nach Anspruch 22, bei dem der Ultraschall-Sender/Empfänger eine weniger als dreidimensionale Darstellung der akustischen Eigenschaften des Gewebes jenseits des distalen Endes (15) liefert.
- Ortungssystem nach Anspruch 23, bei dem das distale Ende (15) ablenkbar ist.
- Ortungssystem nach Anspruch 24 und mit einer Bildrekonstruktionsschaltung, die eine Vielzahl der weniger als dreidimensionalen Darstellungen empfängt, die bei unterschiedlichen Ausrichtungen des distalen Endes (15) erhalten worden sind, und eine dreidimensionale Abbildung der akustischen Eigenschaften von Gewebe, das wenigstens teilweise das distale Ende (15) umgibt, erzeugt.
- Ortungssystem nach Anspruch 15 und weiter mit einem Referenzinstrument, das eine Vielzahl zusätzlicher Sensoren umfaßt, die sich in dem Referenzinstrument befinden, wobei das Anzeigesystem (27) die Position des Abschnittes (16) auf dem invasiven medizinischen Instrument (10) relativ zu der Position eines Punktes auf dem Referenzinstrument anzeigt.
- Ortungssystem nach Anspruch 26, bei dem das Ortungssystem nur ein einzelnes Referenzinstrument aufweist.
- Ortungssystem nach Anspruch 26 oder 27, bei dem das Referenzinstrument ein zusätzliches invasives medizinisches Instrument ist und bei dem die zusätzlichen Sensoren sich nahe dem distalen Ende des Instrumentes befinden.
- System nach einem der vorangehenden Ansprüche, bei dem das invasive medizinische Instrument ein Katheter oder Endoskop ist.
- Verfahren zum Bestimmen der Position und Ausrichtung eines invasiven medizinischen Instrumentes (10) mit einem distalen Ende (15), das umfaßt:(a) Erzeugen einer Vielzahl unterscheidbarer geometrisch unterschiedlicher Wechselstrom-Magnetfelder;(b) Abfühlen der Wechselstrom-Magnetfelder an einer Vielzahl von Sensoren (14) nahe dem distalen Ende; und(c) Berechnen von sechs Dimensionen von Position und Ausrichtung eines Abschnittes (16) des invasiven medizinischen Instrumentes (10) in Antwort auf Signale, die repräsentativ für die erzeugten Magnetfelder und die abgefühlten Magnetfelder sind.
- Verfahren nach Anspruch 30, bei dem die Vielzahl unterscheidbarer geometrisch unterschiedlicher Felder drei solcher Felder aufweist.
- Verfahren nach Anspruch 30 oder 31, bei dem das Wechselstrom-Magnetfeld an drei Punkten des invasiven medizinischen Instrumentes (10) abgefühlt wird.
- Verfahren nach einem der Ansprüche 20 bis 32, bei dem das invasive medizinische Instrument (10) ein Katheter oder Endoskop ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP98203767A EP0894473B1 (de) | 1994-08-19 | 1995-01-24 | Medizinisches Diagnose-, Behandlungs- und Darstellungssystem |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US29385994A | 1994-08-19 | 1994-08-19 | |
| US293859 | 1994-08-19 | ||
| PCT/US1995/001103 WO1996005768A1 (en) | 1994-08-19 | 1995-01-24 | Medical diagnosis, treatment and imaging systems |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98203767A Division EP0894473B1 (de) | 1994-08-19 | 1995-01-24 | Medizinisches Diagnose-, Behandlungs- und Darstellungssystem |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0776176A1 EP0776176A1 (de) | 1997-06-04 |
| EP0776176B1 true EP0776176B1 (de) | 1999-12-29 |
Family
ID=23130898
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP95908708A Expired - Lifetime EP0776176B1 (de) | 1994-08-19 | 1995-01-24 | Medizinisches diagnose-, behandlungs- und darstellungssystem |
| EP98203767A Expired - Lifetime EP0894473B1 (de) | 1994-08-19 | 1995-01-24 | Medizinisches Diagnose-, Behandlungs- und Darstellungssystem |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98203767A Expired - Lifetime EP0894473B1 (de) | 1994-08-19 | 1995-01-24 | Medizinisches Diagnose-, Behandlungs- und Darstellungssystem |
Country Status (10)
| Country | Link |
|---|---|
| EP (2) | EP0776176B1 (de) |
| JP (5) | JP3708121B2 (de) |
| CN (1) | CN1226960C (de) |
| AT (2) | ATE188108T1 (de) |
| AU (1) | AU1693095A (de) |
| CA (2) | CA2607769C (de) |
| DE (2) | DE69514238T2 (de) |
| ES (2) | ES2210662T3 (de) |
| HK (1) | HK1007059A1 (de) |
| WO (1) | WO1996005768A1 (de) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6957101B2 (en) | 2002-08-21 | 2005-10-18 | Joshua Porath | Transient event mapping in the heart |
| US7090639B2 (en) | 2003-05-29 | 2006-08-15 | Biosense, Inc. | Ultrasound catheter calibration system |
| US7366563B2 (en) | 2003-12-15 | 2008-04-29 | Siemens Aktiengesellschaft | Catheter device |
| US7749168B2 (en) | 2003-11-21 | 2010-07-06 | Siemens Aktiengesellschaft | Medical system for examination or treatment |
| US8046049B2 (en) | 2004-02-23 | 2011-10-25 | Biosense Webster, Inc. | Robotically guided catheter |
| US8078286B2 (en) | 2006-11-30 | 2011-12-13 | Biosense Webster, Inc. | Techniques for minimizing radiofrequency-induced tissue heating |
| EP4324508A4 (de) * | 2021-04-15 | 2024-02-21 | Shanghai Microport Ep Medtech Co., Ltd. | Medizinischer katheter und dreidimensionales magnetisches positionierungssystem |
Families Citing this family (825)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2652928B1 (fr) | 1989-10-05 | 1994-07-29 | Diadix Sa | Systeme interactif d'intervention locale a l'interieur d'une zone d'une structure non homogene. |
| US5603318A (en) | 1992-04-21 | 1997-02-18 | University Of Utah Research Foundation | Apparatus and method for photogrammetric surgical localization |
| AU675077B2 (en) | 1992-08-14 | 1997-01-23 | British Telecommunications Public Limited Company | Position location system |
| IL116699A (en) * | 1996-01-08 | 2001-09-13 | Biosense Ltd | Method of building a heart map |
| US6285898B1 (en) * | 1993-07-20 | 2001-09-04 | Biosense, Inc. | Cardiac electromechanics |
| US6983179B2 (en) | 1993-07-20 | 2006-01-03 | Biosense, Inc. | Method for mapping a heart using catheters having ultrasonic position sensors |
| ATE252349T1 (de) | 1994-09-15 | 2003-11-15 | Visualization Technology Inc | System zur positionserfassung mittels einer an einem patientenkopf angebrachten referenzeinheit zur anwendung im medizinischen gebiet |
| US5941251A (en) * | 1994-10-11 | 1999-08-24 | Ep Technologies, Inc. | Systems for locating and guiding operative elements within interior body regions |
| US5868673A (en) * | 1995-03-28 | 1999-02-09 | Sonometrics Corporation | System for carrying out surgery, biopsy and ablation of a tumor or other physical anomaly |
| US5830144A (en) * | 1995-03-28 | 1998-11-03 | Vesely; Ivan | Tracking data sheath |
| US5797849A (en) * | 1995-03-28 | 1998-08-25 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| US5795298A (en) * | 1995-03-28 | 1998-08-18 | Sonometrics Corporation | System for sharing electrocardiogram electrodes and transducers |
| US5817022A (en) * | 1995-03-28 | 1998-10-06 | Sonometrics Corporation | System for displaying a 2-D ultrasound image within a 3-D viewing environment |
| US5954665A (en) * | 1995-06-07 | 1999-09-21 | Biosense, Inc. | Cardiac ablation catheter using correlation measure |
| US5592939A (en) | 1995-06-14 | 1997-01-14 | Martinelli; Michael A. | Method and system for navigating a catheter probe |
| US5842986A (en) | 1995-08-16 | 1998-12-01 | Proton Sciences Corp. | Ferromagnetic foreign body screening method and apparatus |
| JP4175662B2 (ja) | 1996-01-08 | 2008-11-05 | インパルス ダイナミクス エヌ.ヴイ. | 電気的筋肉制御装置 |
| AU712539B2 (en) | 1996-01-08 | 1999-11-11 | Biosense, Inc. | Methods and apparatus for myocardial revascularization |
| US9289618B1 (en) | 1996-01-08 | 2016-03-22 | Impulse Dynamics Nv | Electrical muscle controller |
| US6317631B1 (en) | 1996-01-08 | 2001-11-13 | Impulse Dynamics N.V. | Controlling heart performance using a non-excitatory electric field |
| US6915149B2 (en) | 1996-01-08 | 2005-07-05 | Biosense, Inc. | Method of pacing a heart using implantable device |
| US9713723B2 (en) | 1996-01-11 | 2017-07-25 | Impulse Dynamics Nv | Signal delivery through the right ventricular septum |
| US20020045812A1 (en) | 1996-02-01 | 2002-04-18 | Shlomo Ben-Haim | Implantable sensor for determining position coordinates |
| AU721034B2 (en) * | 1996-02-15 | 2000-06-22 | Biosense, Inc. | Catheter based surgery |
| DE69738274T2 (de) | 1996-02-15 | 2008-08-28 | Biosense Webster, Inc., Diamond Bar | Bewegliche Empfangs- und Sendespulen für ein Ortsbestimmungssystem |
| IL125758A (en) | 1996-02-15 | 2003-07-06 | Biosense Inc | Medical probes with field transducers |
| WO1997029679A2 (en) | 1996-02-15 | 1997-08-21 | Biosense Inc. | Precise position determination of endoscopes |
| AU720441B2 (en) | 1996-02-15 | 2000-06-01 | Biosense, Inc. | Catheter with lumen |
| WO1997029710A1 (en) | 1996-02-15 | 1997-08-21 | Biosense, Inc. | Medical probes with field transducers |
| CA2246287C (en) | 1996-02-15 | 2006-10-24 | Biosense, Inc. | Medical procedures and apparatus using intrabody probes |
| US5769843A (en) * | 1996-02-20 | 1998-06-23 | Cormedica | Percutaneous endomyocardial revascularization |
| JP4141500B2 (ja) | 1996-02-27 | 2008-08-27 | バイオセンス・ウェブスター・インコーポレイテッド | 位置決め装置およびその動作方法 |
| FR2745615B1 (fr) | 1996-03-04 | 1998-06-12 | Guimbretiere Pierre | Joint homocinetique fixe a billes |
| IL126864A (en) | 1996-05-06 | 2003-05-29 | Biosense Inc | Method and apparatus for calibrating a magnetic field generator |
| AU728802B2 (en) * | 1996-05-17 | 2001-01-18 | Biosense, Inc. | Self-aligning catheter |
| US6496713B2 (en) | 1996-06-25 | 2002-12-17 | Mednovus, Inc. | Ferromagnetic foreign body detection with background canceling |
| US6965792B2 (en) | 1996-06-25 | 2005-11-15 | Mednovus, Inc. | Susceptometers for foreign body detection |
| US7047059B2 (en) | 1998-08-18 | 2006-05-16 | Quantum Magnetics, Inc | Simplified water-bag technique for magnetic susceptibility measurements on the human body and other specimens |
| US5724978A (en) * | 1996-09-20 | 1998-03-10 | Cardiovascular Imaging Systems, Inc. | Enhanced accuracy of three-dimensional intraluminal ultrasound (ILUS) image reconstruction |
| US5830145A (en) * | 1996-09-20 | 1998-11-03 | Cardiovascular Imaging Systems, Inc. | Enhanced accuracy of three-dimensional intraluminal ultrasound (ILUS) image reconstruction |
| SI0901341T1 (en) * | 1997-01-03 | 2005-04-30 | Biosense Webster, Inc. | Bend-responsive catheter |
| WO1998029033A1 (en) * | 1997-01-03 | 1998-07-09 | Biosense, Inc. | Bend-responsive catheter |
| ES2237802T3 (es) | 1997-01-08 | 2005-08-01 | Biosense Webster, Inc. | Supervision de la revascularizacion miocardica. |
| ES2247685T3 (es) | 1997-02-25 | 2006-03-01 | Biosense Webster, Inc. | Aparato de terapia de torax guiado por imagen. |
| US6019725A (en) * | 1997-03-07 | 2000-02-01 | Sonometrics Corporation | Three-dimensional tracking and imaging system |
| JP2002515813A (ja) | 1997-05-23 | 2002-05-28 | バイオセンス・インコーポレイテッド | 斜めに延びるルーメンを備えたカテーテル |
| US6490474B1 (en) * | 1997-08-01 | 2002-12-03 | Cardiac Pathways Corporation | System and method for electrode localization using ultrasound |
| DE19736030A1 (de) * | 1997-08-20 | 1999-02-25 | Philips Patentverwaltung | Verfahren zur Navigation eines magnetischen Objektes und MR-Anordung |
| US6226548B1 (en) | 1997-09-24 | 2001-05-01 | Surgical Navigation Technologies, Inc. | Percutaneous registration apparatus and method for use in computer-assisted surgical navigation |
| US6201387B1 (en) | 1997-10-07 | 2001-03-13 | Biosense, Inc. | Miniaturized position sensor having photolithographic coils for tracking a medical probe |
| US6147480A (en) * | 1997-10-23 | 2000-11-14 | Biosense, Inc. | Detection of metal disturbance |
| US6021343A (en) | 1997-11-20 | 2000-02-01 | Surgical Navigation Technologies | Image guided awl/tap/screwdriver |
| US6083166A (en) * | 1997-12-02 | 2000-07-04 | Situs Corporation | Method and apparatus for determining a measure of tissue manipulation |
| US6348058B1 (en) | 1997-12-12 | 2002-02-19 | Surgical Navigation Technologies, Inc. | Image guided spinal surgery guide, system, and method for use thereof |
| US6223066B1 (en) | 1998-01-21 | 2001-04-24 | Biosense, Inc. | Optical position sensors |
| DE69835422T2 (de) | 1998-01-22 | 2006-12-21 | Biosense Webster, Inc., Diamond Bar | Messung im körperinneren |
| US20030125615A1 (en) * | 1998-02-05 | 2003-07-03 | Yitzhack Schwartz | Homing of autologous cells to a target zone in tissue using active therapeutics or substances |
| US7749215B1 (en) * | 1998-02-05 | 2010-07-06 | Biosense, Inc. | Intracardiac cell delivery and cell transplantation |
| US20030113303A1 (en) * | 1998-02-05 | 2003-06-19 | Yitzhack Schwartz | Homing of embryonic stem cells to a target zone in tissue using active therapeutics or substances |
| ES2255155T3 (es) | 1998-02-05 | 2006-06-16 | Biosense Webster, Inc. | Dispositivo para la administracion intracardiaca de farmacos. |
| US20030129750A1 (en) * | 1998-02-05 | 2003-07-10 | Yitzhack Schwartz | Homing of donor cells to a target zone in tissue using active therapeutics or substances |
| GB2335744A (en) * | 1998-03-27 | 1999-09-29 | Intravascular Res Ltd | Medical ultrasonic imaging |
| WO1999049783A1 (en) | 1998-03-30 | 1999-10-07 | Biosense Inc. | Three-axis coil sensor |
| EP1069859A1 (de) * | 1998-04-09 | 2001-01-24 | Boston Scientific Limited | Systeme mit selbstkalibrierung sowie methoden zum lokalisieren und führen von operativen objekten im inneren von lebenden körpern |
| US6173199B1 (en) | 1998-05-05 | 2001-01-09 | Syncro Medical Innovations, Inc. | Method and apparatus for intubation of a patient |
| ATE273039T1 (de) * | 1998-05-05 | 2004-08-15 | Syncro Medical Innovations Inc | Katheter zur intubation eines patienten |
| US6447504B1 (en) | 1998-07-02 | 2002-09-10 | Biosense, Inc. | System for treatment of heart tissue using viability map |
| US6226542B1 (en) | 1998-07-24 | 2001-05-01 | Biosense, Inc. | Three-dimensional reconstruction of intrabody organs |
| US6301496B1 (en) | 1998-07-24 | 2001-10-09 | Biosense, Inc. | Vector mapping of three-dimensionally reconstructed intrabody organs and method of display |
| JP2003524443A (ja) | 1998-08-02 | 2003-08-19 | スーパー ディメンション リミテッド | 医療用体内誘導装置 |
| US6477400B1 (en) | 1998-08-20 | 2002-11-05 | Sofamor Danek Holdings, Inc. | Fluoroscopic image guided orthopaedic surgery system with intraoperative registration |
| US6217518B1 (en) | 1998-10-01 | 2001-04-17 | Situs Corporation | Medical instrument sheath comprising a flexible ultrasound transducer |
| US6373240B1 (en) | 1998-10-15 | 2002-04-16 | Biosense, Inc. | Metal immune system for tracking spatial coordinates of an object in the presence of a perturbed energy field |
| CA2356322A1 (en) | 1998-12-23 | 2000-06-29 | Peter D. Jakab | Magnetic resonance scanner with electromagnetic position and orientation tracking device |
| EP1650576A1 (de) * | 1998-12-23 | 2006-04-26 | Peter D. Jakab | Magnetresonanzscanner mit elektromagnetischer Positions- und Richtungsverfolgungsvorrichtung |
| EP1873545A3 (de) * | 1998-12-23 | 2008-02-13 | Peter D. Jakab | Magnetischer Resonanzscanner mit Vorrichtung zur Positions- und Orientierungsverfolgung |
| WO2006073671A1 (en) | 2004-12-09 | 2006-07-13 | Impulse Dynamics Nv | Protein activity modification |
| US9101765B2 (en) | 1999-03-05 | 2015-08-11 | Metacure Limited | Non-immediate effects of therapy |
| US7575550B1 (en) | 1999-03-11 | 2009-08-18 | Biosense, Inc. | Position sensing based on ultrasound emission |
| US6470207B1 (en) | 1999-03-23 | 2002-10-22 | Surgical Navigation Technologies, Inc. | Navigational guidance via computer-assisted fluoroscopic imaging |
| US6233476B1 (en) * | 1999-05-18 | 2001-05-15 | Mediguide Ltd. | Medical positioning system |
| US8442618B2 (en) | 1999-05-18 | 2013-05-14 | Mediguide Ltd. | Method and system for delivering a medical device to a selected position within a lumen |
| US9833167B2 (en) | 1999-05-18 | 2017-12-05 | Mediguide Ltd. | Method and system for superimposing virtual anatomical landmarks on an image |
| US7778688B2 (en) | 1999-05-18 | 2010-08-17 | MediGuide, Ltd. | System and method for delivering a stent to a selected position within a lumen |
| US9572519B2 (en) | 1999-05-18 | 2017-02-21 | Mediguide Ltd. | Method and apparatus for invasive device tracking using organ timing signal generated from MPS sensors |
| AU1607600A (en) | 1999-07-26 | 2001-02-13 | Super Dimension Ltd. | Linking of an intra-body tracking system to external reference coordinates |
| US6427079B1 (en) | 1999-08-09 | 2002-07-30 | Cormedica Corporation | Position and orientation measuring with magnetic fields |
| WO2001012057A1 (en) | 1999-08-16 | 2001-02-22 | Super Dimension Ltd. | Method and system for displaying cross-sectional images of a body |
| US6368285B1 (en) | 1999-09-21 | 2002-04-09 | Biosense, Inc. | Method and apparatus for mapping a chamber of a heart |
| US6385476B1 (en) | 1999-09-21 | 2002-05-07 | Biosense, Inc. | Method and apparatus for intracardially surveying a condition of a chamber of a heart |
| US6546271B1 (en) * | 1999-10-01 | 2003-04-08 | Bioscience, Inc. | Vascular reconstruction |
| US7366562B2 (en) * | 2003-10-17 | 2008-04-29 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation |
| US8239001B2 (en) | 2003-10-17 | 2012-08-07 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation |
| US6379302B1 (en) | 1999-10-28 | 2002-04-30 | Surgical Navigation Technologies Inc. | Navigation information overlay onto ultrasound imagery |
| US6235038B1 (en) | 1999-10-28 | 2001-05-22 | Medtronic Surgical Navigation Technologies | System for translation of electromagnetic and optical localization systems |
| US6701179B1 (en) | 1999-10-28 | 2004-03-02 | Michael A. Martinelli | Coil structures and methods for generating magnetic fields |
| US6381485B1 (en) | 1999-10-28 | 2002-04-30 | Surgical Navigation Technologies, Inc. | Registration of human anatomy integrated for electromagnetic localization |
| US6747539B1 (en) | 1999-10-28 | 2004-06-08 | Michael A. Martinelli | Patient-shielding and coil system |
| US6493573B1 (en) | 1999-10-28 | 2002-12-10 | Winchester Development Associates | Method and system for navigating a catheter probe in the presence of field-influencing objects |
| US6474341B1 (en) | 1999-10-28 | 2002-11-05 | Surgical Navigation Technologies, Inc. | Surgical communication and power system |
| US11331150B2 (en) | 1999-10-28 | 2022-05-17 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation |
| US6499488B1 (en) | 1999-10-28 | 2002-12-31 | Winchester Development Associates | Surgical sensor |
| US8644907B2 (en) | 1999-10-28 | 2014-02-04 | Medtronic Navigaton, Inc. | Method and apparatus for surgical navigation |
| EP1244385B1 (de) * | 1999-12-15 | 2006-06-14 | Super Dimension Ltd. | Vorrichtung zur anwendung von energie an einem ziel objekt |
| EP1110506A3 (de) * | 1999-12-21 | 2001-10-31 | EchoTech GmbH | Verfahren sowie System zur Generierung von diagnostisch verwertbaren dreidimensionalen Ultraschallbilddatensätzen |
| US6892091B1 (en) | 2000-02-18 | 2005-05-10 | Biosense, Inc. | Catheter, method and apparatus for generating an electrical map of a chamber of the heart |
| US6725080B2 (en) | 2000-03-01 | 2004-04-20 | Surgical Navigation Technologies, Inc. | Multiple cannula image guided tool for image guided procedures |
| FR2806158B1 (fr) * | 2000-03-07 | 2002-05-17 | Commissariat Energie Atomique | Procede pour determiner la position ou l'orientation d'un objet a l'aide d'un champ magnetique et dispositif correspondant |
| US6615155B2 (en) | 2000-03-09 | 2003-09-02 | Super Dimension Ltd. | Object tracking using a single sensor or a pair of sensors |
| US8517923B2 (en) | 2000-04-03 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Apparatus and methods for facilitating treatment of tissue via improved delivery of energy based and non-energy based modalities |
| US6468203B2 (en) | 2000-04-03 | 2002-10-22 | Neoguide Systems, Inc. | Steerable endoscope and improved method of insertion |
| US8888688B2 (en) | 2000-04-03 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Connector device for a controllable instrument |
| US6858005B2 (en) | 2000-04-03 | 2005-02-22 | Neo Guide Systems, Inc. | Tendon-driven endoscope and methods of insertion |
| US6610007B2 (en) | 2000-04-03 | 2003-08-26 | Neoguide Systems, Inc. | Steerable segmented endoscope and method of insertion |
| US6535756B1 (en) | 2000-04-07 | 2003-03-18 | Surgical Navigation Technologies, Inc. | Trajectory storage apparatus and method for surgical navigation system |
| US20050171508A1 (en) * | 2000-04-21 | 2005-08-04 | Pinhas Gilboa | System and method for intravascular catheter navigation |
| US7085400B1 (en) | 2000-06-14 | 2006-08-01 | Surgical Navigation Technologies, Inc. | System and method for image based sensor calibration |
| US6400981B1 (en) * | 2000-06-21 | 2002-06-04 | Biosense, Inc. | Rapid mapping of electrical activity in the heart |
| US6546270B1 (en) | 2000-07-07 | 2003-04-08 | Biosense, Inc. | Multi-electrode catheter, system and method |
| US6569160B1 (en) | 2000-07-07 | 2003-05-27 | Biosense, Inc. | System and method for detecting electrode-tissue contact |
| US6408199B1 (en) | 2000-07-07 | 2002-06-18 | Biosense, Inc. | Bipolar mapping of intracardiac potentials with electrode having blood permeable covering |
| US7809421B1 (en) | 2000-07-20 | 2010-10-05 | Biosense, Inc. | Medical system calibration with static metal compensation |
| US6484118B1 (en) | 2000-07-20 | 2002-11-19 | Biosense, Inc. | Electromagnetic position single axis system |
| US6716166B2 (en) | 2000-08-18 | 2004-04-06 | Biosense, Inc. | Three-dimensional reconstruction using ultrasound |
| US6650927B1 (en) | 2000-08-18 | 2003-11-18 | Biosense, Inc. | Rendering of diagnostic imaging data on a three-dimensional map |
| EP1311226A4 (de) | 2000-08-23 | 2008-12-17 | Micronix Pty Ltd | Katheterortungsvorrichtung und gebrauchsmethode |
| US6725085B2 (en) | 2000-09-22 | 2004-04-20 | Armin Schwartzman | Method and apparatus for characterizing cardiac tissue from local electrograms |
| US6633773B1 (en) | 2000-09-29 | 2003-10-14 | Biosene, Inc. | Area of interest reconstruction for surface of an organ using location data |
| US6783499B2 (en) | 2000-12-18 | 2004-08-31 | Biosense, Inc. | Anchoring mechanism for implantable telemetric medical sensor |
| US6746404B2 (en) | 2000-12-18 | 2004-06-08 | Biosense, Inc. | Method for anchoring a medical device between tissue |
| US6691074B1 (en) | 2001-02-08 | 2004-02-10 | Netmore Ltd. | System for three dimensional positioning and tracking |
| US6584345B2 (en) | 2001-03-13 | 2003-06-24 | Biosense, Inc. | Apparatus and method for measuring a plurality of electrical signals from the body of a patient |
| US6636757B1 (en) | 2001-06-04 | 2003-10-21 | Surgical Navigation Technologies, Inc. | Method and apparatus for electromagnetic navigation of a surgical probe near a metal object |
| US7286868B2 (en) | 2001-06-15 | 2007-10-23 | Biosense Inc. | Medical device with position sensor having accuracy at high temperatures |
| US6992477B2 (en) | 2001-06-15 | 2006-01-31 | Biosense, Inc. | Medical device with position sensor having core with high permeability material for determining location coordinates of a portion of the medical device |
| US6773402B2 (en) | 2001-07-10 | 2004-08-10 | Biosense, Inc. | Location sensing with real-time ultrasound imaging |
| US8428685B2 (en) | 2001-09-05 | 2013-04-23 | Given Imaging Ltd. | System and method for magnetically maneuvering an in vivo device |
| JP2005501630A (ja) * | 2001-09-05 | 2005-01-20 | ギブン・イメージング・リミテッド | 身体管腔の3次元表示のためのシステムおよび方法 |
| US6748255B2 (en) | 2001-12-14 | 2004-06-08 | Biosense Webster, Inc. | Basket catheter with multiple location sensors |
| EP1319366A1 (de) * | 2001-12-14 | 2003-06-18 | BrainLAB AG | Magnetische Katheternavigation |
| US7729742B2 (en) | 2001-12-21 | 2010-06-01 | Biosense, Inc. | Wireless position sensor |
| US6961602B2 (en) * | 2001-12-31 | 2005-11-01 | Biosense Webster, Inc. | Catheter having multiple spines each having electrical mapping and location sensing capabilities |
| AU2002359847A1 (en) | 2002-01-09 | 2003-07-30 | Neoguide Systems, Inc | Apparatus and method for endoscopic colectomy |
| US6947786B2 (en) | 2002-02-28 | 2005-09-20 | Surgical Navigation Technologies, Inc. | Method and apparatus for perspective inversion |
| DE10212841B4 (de) | 2002-03-22 | 2011-02-24 | Karl Storz Gmbh & Co. Kg | Medizinisches Instrument zur Behandlung von Gewebe mittels Hochfrequenzstrom sowie medizinisches System mit einem derartigen medizinischen Instrument |
| US6990368B2 (en) | 2002-04-04 | 2006-01-24 | Surgical Navigation Technologies, Inc. | Method and apparatus for virtual digital subtraction angiography |
| US7998062B2 (en) | 2004-03-29 | 2011-08-16 | Superdimension, Ltd. | Endoscope structures and techniques for navigating to a target in branched structure |
| US7769427B2 (en) * | 2002-07-16 | 2010-08-03 | Magnetics, Inc. | Apparatus and method for catheter guidance control and imaging |
| US7060075B2 (en) * | 2002-07-18 | 2006-06-13 | Biosense, Inc. | Distal targeting of locking screws in intramedullary nails |
| US20040143182A1 (en) * | 2002-08-08 | 2004-07-22 | Pavel Kucera | System and method for monitoring and stimulating gastro-intestinal motility |
| US7089045B2 (en) | 2002-08-30 | 2006-08-08 | Biosense Webster, Inc. | Catheter and method for mapping Purkinje fibers |
| US20040049121A1 (en) * | 2002-09-06 | 2004-03-11 | Uri Yaron | Positioning system for neurological procedures in the brain |
| US20040068178A1 (en) | 2002-09-17 | 2004-04-08 | Assaf Govari | High-gradient recursive locating system |
| JP2004113629A (ja) * | 2002-09-27 | 2004-04-15 | Olympus Corp | 超音波診断装置 |
| US7001383B2 (en) | 2002-10-21 | 2006-02-21 | Biosense, Inc. | Real-time monitoring and mapping of ablation lesion formation in the heart |
| US8862204B2 (en) | 2002-11-18 | 2014-10-14 | Mediguide Ltd. | Reducing mechanical stress on conductors and connection points in a position determinable interventional medical device |
| US7881769B2 (en) | 2002-11-18 | 2011-02-01 | Mediguide Ltd. | Method and system for mounting an MPS sensor on a catheter |
| CA2504613C (en) * | 2002-11-18 | 2012-01-31 | Mediguide Ltd. | Method and system for mounting an mps sensor on a catheter |
| US7697972B2 (en) | 2002-11-19 | 2010-04-13 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| US7599730B2 (en) | 2002-11-19 | 2009-10-06 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| US7945309B2 (en) * | 2002-11-22 | 2011-05-17 | Biosense, Inc. | Dynamic metal immunity |
| US7542791B2 (en) | 2003-01-30 | 2009-06-02 | Medtronic Navigation, Inc. | Method and apparatus for preplanning a surgical procedure |
| US7660623B2 (en) | 2003-01-30 | 2010-02-09 | Medtronic Navigation, Inc. | Six degree of freedom alignment display for medical procedures |
| US7201749B2 (en) * | 2003-02-19 | 2007-04-10 | Biosense, Inc. | Externally-applied high intensity focused ultrasound (HIFU) for pulmonary vein isolation |
| WO2004075928A2 (en) * | 2003-02-21 | 2004-09-10 | Electro-Cat, Llc | System and method for measuring cross-sectional areas and pressure gradients in luminal organs |
| US8882657B2 (en) | 2003-03-07 | 2014-11-11 | Intuitive Surgical Operations, Inc. | Instrument having radio frequency identification systems and methods for use |
| US20040176683A1 (en) * | 2003-03-07 | 2004-09-09 | Katherine Whitin | Method and apparatus for tracking insertion depth |
| US11439815B2 (en) | 2003-03-10 | 2022-09-13 | Impulse Dynamics Nv | Protein activity modification |
| US6994094B2 (en) | 2003-04-29 | 2006-02-07 | Biosense, Inc. | Method and device for transseptal facilitation based on injury patterns |
| US20040220471A1 (en) | 2003-04-29 | 2004-11-04 | Yitzhack Schwartz | Method and device for transseptal facilitation using location system |
| US20040220461A1 (en) | 2003-04-29 | 2004-11-04 | Yitzhack Schwartz | Transseptal facilitation using sheath with electrode arrangement |
| EP1623674B1 (de) | 2003-05-08 | 2016-04-13 | Hitachi Medical Corporation | Referenzbild-darstellungsverfahren für ultrasonographie und ultraschallgerät |
| CN100548223C (zh) * | 2003-05-08 | 2009-10-14 | 株式会社日立医药 | 超声诊断设备 |
| US7433728B2 (en) | 2003-05-29 | 2008-10-07 | Biosense, Inc. | Dynamic metal immunity by hysteresis |
| US7818048B2 (en) | 2003-06-02 | 2010-10-19 | Biosense Webster, Inc. | Catheter and method for mapping a pulmonary vein |
| US7003342B2 (en) | 2003-06-02 | 2006-02-21 | Biosense Webster, Inc. | Catheter and method for mapping a pulmonary vein |
| WO2004110271A1 (en) * | 2003-06-16 | 2004-12-23 | Philips Intellectual Property & Standards Gmbh | Imaging system for interventional radiology |
| EP1502620A1 (de) * | 2003-07-07 | 2005-02-02 | BrainLAB AG | Verfahren und Vorrichtung zum Navigieren eines Objekts in einem Körper, insbesondere zu einem Aneurysma |
| US10182734B2 (en) | 2003-07-18 | 2019-01-22 | Biosense Webster, Inc. | Enhanced ablation and mapping catheter and method for treating atrial fibrillation |
| US6973339B2 (en) | 2003-07-29 | 2005-12-06 | Biosense, Inc | Lasso for pulmonary vein mapping and ablation |
| US7613497B2 (en) | 2003-07-29 | 2009-11-03 | Biosense Webster, Inc. | Energy transfer amplification for intrabody devices |
| US7295877B2 (en) | 2003-07-31 | 2007-11-13 | Biosense Webster, Inc. | Encapsulated sensor with external antenna |
| US20050027195A1 (en) * | 2003-08-01 | 2005-02-03 | Assaf Govari | Calibration data compression |
| US7313430B2 (en) | 2003-08-28 | 2007-12-25 | Medtronic Navigation, Inc. | Method and apparatus for performing stereotactic surgery |
| EP2316328B1 (de) | 2003-09-15 | 2012-05-09 | Super Dimension Ltd. | Umhüllungsvorrichtung zur Fixierung von Bronchoskopen |
| JP2007519425A (ja) | 2003-09-15 | 2007-07-19 | スーパー ディメンション リミテッド | 気管支鏡用アクセサリー・システム |
| US7835778B2 (en) | 2003-10-16 | 2010-11-16 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation of a multiple piece construct for implantation |
| US7840253B2 (en) | 2003-10-17 | 2010-11-23 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation |
| US7951081B2 (en) | 2003-10-20 | 2011-05-31 | Boston Scientific Scimed, Inc. | Transducer/sensor assembly |
| US7207989B2 (en) | 2003-10-27 | 2007-04-24 | Biosense Webster, Inc. | Method for ablating with needle electrode |
| US7366557B2 (en) | 2003-11-07 | 2008-04-29 | Biosense Webster, Inc. | Flower catheter |
| US7397364B2 (en) | 2003-11-11 | 2008-07-08 | Biosense Webster, Inc. | Digital wireless position sensor |
| US7367970B2 (en) | 2003-11-11 | 2008-05-06 | Biosense Webster Inc. | Externally applied RF for pulmonary vein isolation |
| US8764725B2 (en) | 2004-02-09 | 2014-07-01 | Covidien Lp | Directional anchoring mechanism, method and applications thereof |
| JP4639199B2 (ja) * | 2004-02-18 | 2011-02-23 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 磁気位置決め装置の測定値補正 |
| US8046050B2 (en) | 2004-03-05 | 2011-10-25 | Biosense Webster, Inc. | Position sensing system for orthopedic applications |
| EP1720452A1 (de) | 2004-03-05 | 2006-11-15 | Depuy International Limited | Orthopädisches überwachungssystem, verfahren und gerät |
| WO2005086062A2 (en) | 2004-03-05 | 2005-09-15 | Depuy International Limited | Registration methods and apparatus |
| GB0405013D0 (en) | 2004-03-05 | 2004-04-07 | Depuy Int Ltd | Implantable marker instruments and methods |
| WO2005084541A1 (en) | 2004-03-05 | 2005-09-15 | Depuy International Ltd | Pelvis registration method and apparatus |
| US11779768B2 (en) | 2004-03-10 | 2023-10-10 | Impulse Dynamics Nv | Protein activity modification |
| US8548583B2 (en) | 2004-03-10 | 2013-10-01 | Impulse Dynamics Nv | Protein activity modification |
| US7567834B2 (en) | 2004-05-03 | 2009-07-28 | Medtronic Navigation, Inc. | Method and apparatus for implantation between two vertebral bodies |
| DE102004036217B4 (de) | 2004-07-26 | 2009-08-06 | Siemens Ag | Interventionelles, biegbares medizinisches Gerät mit einer Empfangseinheit für ein Magnetresonanzsignal und einer Auswerteeinheit |
| US7373271B1 (en) | 2004-09-20 | 2008-05-13 | Ascension Technology Corporation | System and method for measuring position and orientation using distortion-compensated magnetic fields |
| WO2006046516A1 (ja) * | 2004-10-26 | 2006-05-04 | Olympus Corporation | 内視鏡形状検出装置 |
| JP4727211B2 (ja) * | 2004-11-10 | 2011-07-20 | オリンパス株式会社 | 内視鏡挿入形状検出装置 |
| JP4939743B2 (ja) * | 2004-11-08 | 2012-05-30 | 株式会社東芝 | X線撮像装置 |
| DE102004058008B4 (de) * | 2004-12-01 | 2007-08-23 | Siemens Ag | Führungsdraht für Gefäßkatheter mit verbesserter Ortungs- und Navigiermöglichkeit |
| US7976518B2 (en) | 2005-01-13 | 2011-07-12 | Corpak Medsystems, Inc. | Tubing assembly and signal generator placement control device and method for use with catheter guidance systems |
| JP2006223730A (ja) * | 2005-02-21 | 2006-08-31 | Pentax Corp | 電子内視鏡システム |
| US20060241397A1 (en) | 2005-02-22 | 2006-10-26 | Assaf Govari | Reference pad for position sensing |
| EP1693011A1 (de) | 2005-02-22 | 2006-08-23 | Depuy International Limited | Instrument zum Einsetzen eines Sensors |
| DE102005012696A1 (de) | 2005-03-18 | 2006-09-21 | Siemens Ag | Medizinisches Untersunchungs- und/oder Behandlungssystem |
| JP4914574B2 (ja) * | 2005-04-18 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 内視鏡形状検出装置 |
| US10143398B2 (en) | 2005-04-26 | 2018-12-04 | Biosense Webster, Inc. | Registration of ultrasound data with pre-acquired image |
| US7706860B2 (en) | 2005-04-28 | 2010-04-27 | Boston Scientific Scimed, Inc. | Automated manipulation of imaging device field of view based on tracked medical device position |
| US20060247522A1 (en) * | 2005-04-28 | 2006-11-02 | Boston Scientific Scimed, Inc. | Magnetic navigation systems with dynamic mechanically manipulatable catheters |
| US8571635B2 (en) | 2005-04-28 | 2013-10-29 | Boston Scientific Scimed, Inc. | Automated activation/deactivation of imaging device based on tracked medical device position |
| US9295529B2 (en) | 2005-05-16 | 2016-03-29 | Biosense Webster, Inc. | Position tracking using quasi-DC magnetic fields |
| DE102005028746B4 (de) | 2005-06-21 | 2018-02-22 | Siemens Healthcare Gmbh | Verfahren zum Ermitteln der Position und Orientierung eines Objekts, insbesondere eines Katheters, aus zweidimonsionalen Röntgenbildern |
| US7324915B2 (en) | 2005-07-14 | 2008-01-29 | Biosense Webster, Inc. | Data transmission to a position sensor |
| US8730011B2 (en) | 2005-07-14 | 2014-05-20 | Biosense Webster, Inc. | Wireless position transducer with digital signaling |
| US7536218B2 (en) * | 2005-07-15 | 2009-05-19 | Biosense Webster, Inc. | Hybrid magnetic-based and impedance-based position sensing |
| JP4730889B2 (ja) * | 2005-07-26 | 2011-07-20 | 日立アロカメディカル株式会社 | 超音波画像形成システム |
| EP1913338B1 (de) | 2005-08-04 | 2019-04-17 | Koninklijke Philips N.V. | System und verfahren zur magnetischen verfolgung eines sensors zur lokalisierung einer eingriffsvorrichtung |
| US8784336B2 (en) | 2005-08-24 | 2014-07-22 | C. R. Bard, Inc. | Stylet apparatuses and methods of manufacture |
| US7756576B2 (en) | 2005-08-26 | 2010-07-13 | Biosense Webster, Inc. | Position sensing and detection of skin impedance |
| US7835784B2 (en) | 2005-09-21 | 2010-11-16 | Medtronic Navigation, Inc. | Method and apparatus for positioning a reference frame |
| DE102005045362B4 (de) | 2005-09-22 | 2012-03-22 | Siemens Ag | Vorrichtung zur Positionsbestimmung eines medizinischen Instruments, dazugehörige bildgebende Untersuchungseinrichtung nebst dazugehörigem Verfahren |
| DE102005048892B4 (de) * | 2005-09-22 | 2009-01-15 | Siemens Ag | Vorrichtung zur Durchführung von Rotablation sowie medizinische Behandlungseinrichtung |
| US7301332B2 (en) | 2005-10-06 | 2007-11-27 | Biosense Webster, Inc. | Magnetic sensor assembly |
| EP3788944B1 (de) | 2005-11-22 | 2024-02-28 | Intuitive Surgical Operations, Inc. | System zur bestimmung der form eines biegbaren instruments |
| WO2007062066A2 (en) | 2005-11-23 | 2007-05-31 | Neoguide Systems, Inc. | Non-metallic, multi-strand control cable for steerable instruments |
| EP1965698B1 (de) * | 2005-12-29 | 2014-02-19 | Given Imaging Ltd. | System und verfahren für die magnetpositionsbestimmung in vivo |
| US7879029B2 (en) | 2005-12-30 | 2011-02-01 | Biosense Webster, Inc. | System and method for selectively energizing catheter electrodes |
| US9629567B2 (en) | 2006-01-12 | 2017-04-25 | Biosense Webster, Inc. | Mapping of complex fractionated atrial electrogram |
| US9168102B2 (en) | 2006-01-18 | 2015-10-27 | Medtronic Navigation, Inc. | Method and apparatus for providing a container to a sterile environment |
| US7860553B2 (en) * | 2006-02-09 | 2010-12-28 | Biosense Webster, Inc. | Two-stage calibration of medical probes |
| US7996059B2 (en) | 2006-03-08 | 2011-08-09 | Biosense Webster, Inc. | Esophagus imaging enhancement device |
| US7855723B2 (en) | 2006-03-21 | 2010-12-21 | Biosense Webster, Inc. | Image registration using locally-weighted fitting |
| GB0605807D0 (en) | 2006-03-23 | 2006-05-03 | Depuy Int Ltd | A template for use in a surgical procedure |
| GB0605793D0 (en) | 2006-03-23 | 2006-05-03 | Depuy Orthopaedie Gmbh | A sensor assembly |
| US8112292B2 (en) | 2006-04-21 | 2012-02-07 | Medtronic Navigation, Inc. | Method and apparatus for optimizing a therapy |
| US9364293B2 (en) | 2006-04-28 | 2016-06-14 | Biosense Webster, Inc. | Reduced field distortion in medical tools |
| US20070265526A1 (en) | 2006-05-11 | 2007-11-15 | Assaf Govari | Low-profile location pad |
| US8568299B2 (en) | 2006-05-19 | 2013-10-29 | Intuitive Surgical Operations, Inc. | Methods and apparatus for displaying three-dimensional orientation of a steerable distal tip of an endoscope |
| US7688064B2 (en) | 2006-07-11 | 2010-03-30 | Biosense Webster Inc. | Probe for assessment of metal distortion |
| FR2904427B1 (fr) * | 2006-07-25 | 2010-08-20 | Univ Poitiers | Systeme et procede pour la localisation tridimensionnelle d'un objet dans un volume |
| US7728868B2 (en) | 2006-08-02 | 2010-06-01 | Inneroptic Technology, Inc. | System and method of providing real-time dynamic imagery of a medical procedure site using multiple modalities |
| US8082020B2 (en) | 2006-08-07 | 2011-12-20 | Biosense Webster, Inc. | Distortion-immune position tracking using redundant magnetic field measurements |
| US8326402B2 (en) | 2006-08-21 | 2012-12-04 | Biosense Webster, Inc. | Distortion-immune position tracking using frequency extrapolation |
| US9370312B2 (en) | 2006-09-06 | 2016-06-21 | Biosense Webster, Inc. | Correlation of cardiac electrical maps with body surface measurements |
| US8197494B2 (en) | 2006-09-08 | 2012-06-12 | Corpak Medsystems, Inc. | Medical device position guidance system with wireless connectivity between a noninvasive device and an invasive device |
| US8660635B2 (en) | 2006-09-29 | 2014-02-25 | Medtronic, Inc. | Method and apparatus for optimizing a computer assisted surgical procedure |
| US8694077B2 (en) | 2006-10-06 | 2014-04-08 | The Cleveland Clinic Foundation | Apparatus and method for targeting a body tissue |
| WO2008070262A2 (en) | 2006-10-06 | 2008-06-12 | The Cleveland Clinic Foundation | Apparatus and method for targeting a body tissue |
| RU2417732C2 (ru) * | 2006-10-10 | 2011-05-10 | Байосенс Уэбстер, Инк. | Катетер для картрирования пищевода |
| US8388546B2 (en) | 2006-10-23 | 2013-03-05 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| US7794407B2 (en) | 2006-10-23 | 2010-09-14 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| DE102006050886B4 (de) * | 2006-10-27 | 2016-12-22 | Siemens Healthcare Gmbh | Medizinisches Instrument und Einrichtung zur Erzeugung von Gewebeschnittbildern |
| DE102006050885B4 (de) * | 2006-10-27 | 2016-11-03 | Siemens Healthcare Gmbh | Vorrichtung zur Erzeugung von Gewebeschnittbildern |
| US8174395B2 (en) | 2006-11-20 | 2012-05-08 | St. Jude Medical Systems Ab | Transceiver unit in a measurement system |
| US11234650B2 (en) | 2006-11-20 | 2022-02-01 | St. Jude Medical Coordination Center Bvba | Measurement system |
| DE602006006700D1 (de) * | 2006-11-21 | 2009-06-18 | Fiat Ricerche | Verfahren und Vorrichtung zur Bestimmung der relativen Position zweier zueinander mobiler Elemente |
| IL187667A (en) * | 2006-11-27 | 2011-12-29 | Mediguide Ltd | System and method for navigating a surgical needle toward an organ of the body of a patient |
| AU2013251245B2 (en) * | 2006-12-08 | 2015-05-14 | Biosense Webster, Inc. | Coloring electroanatomical maps to indicate ultrasound data acquisition |
| US7831076B2 (en) * | 2006-12-08 | 2010-11-09 | Biosense Webster, Inc. | Coloring electroanatomical maps to indicate ultrasound data acquisition |
| US7907994B2 (en) | 2007-01-11 | 2011-03-15 | Biosense Webster, Inc. | Automated pace-mapping for identification of cardiac arrhythmic conductive pathways and foci |
| JP5174891B2 (ja) * | 2007-04-27 | 2013-04-03 | シーヴィ デヴァイシズ,エルエルシー | 心臓の心外膜表面にアクセスするための装置、システム、および方法 |
| US20080287776A1 (en) | 2007-05-16 | 2008-11-20 | Yaron Ephrath | Gastric band with position sensing |
| US8905920B2 (en) | 2007-09-27 | 2014-12-09 | Covidien Lp | Bronchoscope adapter and method |
| US8535308B2 (en) | 2007-10-08 | 2013-09-17 | Biosense Webster (Israel), Ltd. | High-sensitivity pressure-sensing probe |
| US8357152B2 (en) | 2007-10-08 | 2013-01-22 | Biosense Webster (Israel), Ltd. | Catheter with pressure sensing |
| US9220398B2 (en) | 2007-10-11 | 2015-12-29 | Intuitive Surgical Operations, Inc. | System for managing Bowden cables in articulating instruments |
| US10751509B2 (en) | 2007-11-26 | 2020-08-25 | C. R. Bard, Inc. | Iconic representations for guidance of an indwelling medical device |
| US9521961B2 (en) | 2007-11-26 | 2016-12-20 | C. R. Bard, Inc. | Systems and methods for guiding a medical instrument |
| US10524691B2 (en) | 2007-11-26 | 2020-01-07 | C. R. Bard, Inc. | Needle assembly including an aligned magnetic element |
| US9456766B2 (en) | 2007-11-26 | 2016-10-04 | C. R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| US8849382B2 (en) | 2007-11-26 | 2014-09-30 | C. R. Bard, Inc. | Apparatus and display methods relating to intravascular placement of a catheter |
| AU2008329807B2 (en) | 2007-11-26 | 2014-02-27 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US8781555B2 (en) | 2007-11-26 | 2014-07-15 | C. R. Bard, Inc. | System for placement of a catheter including a signal-generating stylet |
| US10449330B2 (en) | 2007-11-26 | 2019-10-22 | C. R. Bard, Inc. | Magnetic element-equipped needle assemblies |
| US9649048B2 (en) | 2007-11-26 | 2017-05-16 | C. R. Bard, Inc. | Systems and methods for breaching a sterile field for intravascular placement of a catheter |
| US8359092B2 (en) | 2007-11-29 | 2013-01-22 | Biosense Webster, Inc. | Determining locations of ganglia and plexi in the heart using complex fractionated atrial electrogram |
| US9095685B2 (en) | 2008-01-23 | 2015-08-04 | Mediguide Ltd. | Sensor mounted flexible guidewire |
| US8343076B2 (en) | 2008-01-23 | 2013-01-01 | MediGuide, Ltd. | Sensor mounted flexible guidewire |
| WO2009094646A2 (en) | 2008-01-24 | 2009-07-30 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer readable media for image guided ablation |
| US8478382B2 (en) | 2008-02-11 | 2013-07-02 | C. R. Bard, Inc. | Systems and methods for positioning a catheter |
| US8182418B2 (en) | 2008-02-25 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Systems and methods for articulating an elongate body |
| US9575140B2 (en) | 2008-04-03 | 2017-02-21 | Covidien Lp | Magnetic interference detection system and method |
| WO2009147671A1 (en) | 2008-06-03 | 2009-12-10 | Superdimension Ltd. | Feature-based registration method |
| US8218847B2 (en) | 2008-06-06 | 2012-07-10 | Superdimension, Ltd. | Hybrid registration method |
| US8437832B2 (en) | 2008-06-06 | 2013-05-07 | Biosense Webster, Inc. | Catheter with bendable tip |
| RU2520369C2 (ru) * | 2008-06-25 | 2014-06-27 | Конинклейке Филипс Электроникс Н.В. | Устройство и способ локализации представляющего интерес объекта у субъекта |
| US7904143B2 (en) | 2008-07-07 | 2011-03-08 | Biosense Webster, Inc. | Binary logistic mixed model for complex fractionated atrial electrogram procedures |
| US8932207B2 (en) | 2008-07-10 | 2015-01-13 | Covidien Lp | Integrated multi-functional endoscopic tool |
| EP2317966B1 (de) * | 2008-07-23 | 2019-10-23 | Atreo Medical, Inc. | Cpr-hilfsgerät zur messung von kompressionsparametern während einer kardiopulmonären reanimation |
| US8926528B2 (en) | 2008-08-06 | 2015-01-06 | Biosense Webster, Inc. | Single-axis sensors on flexible backbone |
| EP2313143B1 (de) | 2008-08-22 | 2014-09-24 | C.R. Bard, Inc. | Katheteranordnung mit ekg-sensor und magnetischen baugruppen |
| JP5183359B2 (ja) * | 2008-08-25 | 2013-04-17 | 日本システムウエア株式会社 | 画像処理装置、画像処理方法、画像処理プログラム、並びに該プログラムを格納したコンピュータ可読媒体 |
| US9089254B2 (en) | 2008-08-28 | 2015-07-28 | Biosense Webster, Inc. | Synchronization of medical devices via digital interface |
| US9101734B2 (en) | 2008-09-09 | 2015-08-11 | Biosense Webster, Inc. | Force-sensing catheter with bonded center strut |
| US8165658B2 (en) | 2008-09-26 | 2012-04-24 | Medtronic, Inc. | Method and apparatus for positioning a guide relative to a base |
| US8437833B2 (en) | 2008-10-07 | 2013-05-07 | Bard Access Systems, Inc. | Percutaneous magnetic gastrostomy |
| US8175681B2 (en) | 2008-12-16 | 2012-05-08 | Medtronic Navigation Inc. | Combination of electromagnetic and electropotential localization |
| US9326700B2 (en) | 2008-12-23 | 2016-05-03 | Biosense Webster (Israel) Ltd. | Catheter display showing tip angle and pressure |
| US8475450B2 (en) | 2008-12-30 | 2013-07-02 | Biosense Webster, Inc. | Dual-purpose lasso catheter with irrigation |
| US8600472B2 (en) | 2008-12-30 | 2013-12-03 | Biosense Webster (Israel), Ltd. | Dual-purpose lasso catheter with irrigation using circumferentially arranged ring bump electrodes |
| US8554307B2 (en) | 2010-04-12 | 2013-10-08 | Inneroptic Technology, Inc. | Image annotation in image-guided medical procedures |
| US8690776B2 (en) | 2009-02-17 | 2014-04-08 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image guided surgery |
| US8641621B2 (en) | 2009-02-17 | 2014-02-04 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image management in image-guided medical procedures |
| US11464578B2 (en) | 2009-02-17 | 2022-10-11 | Inneroptic Technology, Inc. | Systems, methods, apparatuses, and computer-readable media for image management in image-guided medical procedures |
| CN101836862B (zh) | 2009-03-16 | 2014-03-26 | 上海微创医疗器械(集团)有限公司 | 人体腔室内壁三维标测方法及其设备和系统 |
| US8611984B2 (en) * | 2009-04-08 | 2013-12-17 | Covidien Lp | Locatable catheter |
| US9532724B2 (en) | 2009-06-12 | 2017-01-03 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation using endovascular energy mapping |
| ES2745861T3 (es) | 2009-06-12 | 2020-03-03 | Bard Access Systems Inc | Aparato, algoritmo de procesamiento de datos asistido por ordenador y medio de almacenamiento informático para posicionar un dispositivo endovascular en o cerca del corazón |
| WO2011019760A2 (en) | 2009-08-10 | 2011-02-17 | Romedex International Srl | Devices and methods for endovascular electrography |
| US8494613B2 (en) | 2009-08-31 | 2013-07-23 | Medtronic, Inc. | Combination localization system |
| US8494614B2 (en) | 2009-08-31 | 2013-07-23 | Regents Of The University Of Minnesota | Combination localization system |
| JP5386698B2 (ja) * | 2009-09-07 | 2014-01-15 | アイチ・マイクロ・インテリジェント株式会社 | 室内位置検出装置 |
| EP2517622A3 (de) | 2009-09-29 | 2013-04-24 | C. R. Bard, Inc. | Stillete zur Verwendung mit Vorrichtungen zur intravaskulären Positionierung eines Katheters |
| US11103213B2 (en) | 2009-10-08 | 2021-08-31 | C. R. Bard, Inc. | Spacers for use with an ultrasound probe |
| US10639008B2 (en) | 2009-10-08 | 2020-05-05 | C. R. Bard, Inc. | Support and cover structures for an ultrasound probe head |
| CA2778496C (en) | 2009-10-22 | 2019-11-26 | Urinary Biosolutions, Llc | Treatment of female stress urinary incontinence |
| JP5527841B2 (ja) * | 2009-11-17 | 2014-06-25 | 国立大学法人 東京大学 | 医療画像処理システム |
| CN102711648B (zh) * | 2009-11-30 | 2015-07-29 | 麦迪威公司 | 具有跟踪传感器的射频消融系统 |
| US10688278B2 (en) | 2009-11-30 | 2020-06-23 | Biosense Webster (Israel), Ltd. | Catheter with pressure measuring tip |
| US10624553B2 (en) * | 2009-12-08 | 2020-04-21 | Biosense Webster (Israel), Ltd. | Probe data mapping using contact information |
| US8374819B2 (en) | 2009-12-23 | 2013-02-12 | Biosense Webster (Israel), Ltd. | Actuator-based calibration system for a pressure-sensitive catheter |
| US8521462B2 (en) | 2009-12-23 | 2013-08-27 | Biosense Webster (Israel), Ltd. | Calibration system for a pressure-sensitive catheter |
| US8608735B2 (en) | 2009-12-30 | 2013-12-17 | Biosense Webster (Israel) Ltd. | Catheter with arcuate end section |
| US8428328B2 (en) | 2010-02-01 | 2013-04-23 | Superdimension, Ltd | Region-growing algorithm |
| WO2011092710A2 (en) | 2010-02-01 | 2011-08-04 | Metacure Limited | Gastrointestinal electrical therapy |
| ES2811107T3 (es) | 2010-02-02 | 2021-03-10 | Bard Inc C R | Aparato y método para conducción de catéter y localización de punta |
| CA2733621C (en) * | 2010-03-10 | 2017-10-10 | Northern Digital Inc. | Multi-field magnetic tracking |
| EP2575610B1 (de) | 2010-05-28 | 2022-10-05 | C. R. Bard, Inc. | Einsatzführungssystem für nadeln und medizinische komponenten |
| US8798952B2 (en) | 2010-06-10 | 2014-08-05 | Biosense Webster (Israel) Ltd. | Weight-based calibration system for a pressure sensitive catheter |
| WO2011159834A1 (en) | 2010-06-15 | 2011-12-22 | Superdimension, Ltd. | Locatable expandable working channel and method |
| US8141558B2 (en) | 2010-06-16 | 2012-03-27 | Biosense Webster (Israel), Ltd. | Position dependent interference cancellation |
| US8226580B2 (en) * | 2010-06-30 | 2012-07-24 | Biosense Webster (Israel), Ltd. | Pressure sensing for a multi-arm catheter |
| US9307927B2 (en) | 2010-08-05 | 2016-04-12 | Biosense Webster (Israel) Ltd. | Catheter entanglement indication |
| JP2012034890A (ja) * | 2010-08-09 | 2012-02-23 | Tohoku Gakuin | 環状中空体に固定されたlc共振型磁気マーカの検出システム |
| MX338127B (es) | 2010-08-20 | 2016-04-04 | Bard Inc C R | Reconfirmacion de colocacion de una punta de cateter asistida por ecg. |
| US8731859B2 (en) | 2010-10-07 | 2014-05-20 | Biosense Webster (Israel) Ltd. | Calibration system for a force-sensing catheter |
| EP2632382B2 (de) | 2010-10-28 | 2024-06-26 | Intersect ENT International GmbH | Navigationsaufsatz für optische geräte in der medizin und verfahren |
| US8406875B2 (en) | 2010-10-28 | 2013-03-26 | Biosense Webster (Israel), Ltd. | Routing of pacing signals |
| CN103189009B (zh) | 2010-10-29 | 2016-09-07 | C·R·巴德股份有限公司 | 医疗设备的生物阻抗辅助放置 |
| US8979772B2 (en) | 2010-11-03 | 2015-03-17 | Biosense Webster (Israel), Ltd. | Zero-drift detection and correction in contact force measurements |
| BR112013012197A8 (pt) | 2010-11-18 | 2019-02-05 | Koninl Philips Electronics Nv | conjunto transdutor ultrassônico, sistema transdutor ultrassônico, ponta de cateter, método de fabricação de conjuntos transdutores ultrassônicos e método de fabricação de sistemas transdutores ultrassônicos |
| US8971993B2 (en) | 2010-11-19 | 2015-03-03 | Mediguide Ltd. | Systems and methods for navigating a surgical device |
| US10016233B2 (en) | 2010-12-06 | 2018-07-10 | Biosense Webster (Israel) Ltd. | Treatment of atrial fibrillation using high-frequency pacing and ablation of renal nerves |
| US9044244B2 (en) | 2010-12-10 | 2015-06-02 | Biosense Webster (Israel), Ltd. | System and method for detection of metal disturbance based on mutual inductance measurement |
| US10307205B2 (en) | 2010-12-10 | 2019-06-04 | Biosense Webster (Israel) Ltd. | System and method for detection of metal disturbance based on orthogonal field components |
| US9211094B2 (en) | 2010-12-10 | 2015-12-15 | Biosense Webster (Israel), Ltd. | System and method for detection of metal disturbance based on contact force measurement |
| CN102525386B (zh) | 2010-12-17 | 2015-11-25 | 世意法(北京)半导体研发有限责任公司 | 胶囊内窥镜 |
| US9308041B2 (en) | 2010-12-22 | 2016-04-12 | Biosense Webster (Israel) Ltd. | Lasso catheter with rotating ultrasound transducer |
| US8391947B2 (en) | 2010-12-30 | 2013-03-05 | Biosense Webster (Israel), Ltd. | Catheter with sheet array of electrodes |
| US8333103B2 (en) | 2011-03-30 | 2012-12-18 | Biosense Webster (Israel), Ltd. | Calibration of a force measuring system for large bend angles of a catheter |
| US10918307B2 (en) | 2011-09-13 | 2021-02-16 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Catheter navigation using impedance and magnetic field measurements |
| US8523787B2 (en) | 2011-06-03 | 2013-09-03 | Biosense Webster (Israel), Ltd. | Detection of tenting |
| US9220433B2 (en) | 2011-06-30 | 2015-12-29 | Biosense Webster (Israel), Ltd. | Catheter with variable arcuate distal section |
| KR20140051284A (ko) | 2011-07-06 | 2014-04-30 | 씨. 알. 바드, 인크. | 삽입 유도 시스템을 위한 바늘 길이 결정 및 교정 |
| US9977096B2 (en) | 2011-07-07 | 2018-05-22 | Biosense Webster (Israel) Ltd. | Connector with active shielding |
| US8847587B2 (en) | 2011-07-13 | 2014-09-30 | Biosense Webster (Israel) Ltd. | Field generator patch with distortion cancellation |
| US10743932B2 (en) | 2011-07-28 | 2020-08-18 | Biosense Webster (Israel) Ltd. | Integrated ablation system using catheter with multiple irrigation lumens |
| US9662169B2 (en) | 2011-07-30 | 2017-05-30 | Biosense Webster (Israel) Ltd. | Catheter with flow balancing valve |
| USD724745S1 (en) | 2011-08-09 | 2015-03-17 | C. R. Bard, Inc. | Cap for an ultrasound probe |
| USD699359S1 (en) | 2011-08-09 | 2014-02-11 | C. R. Bard, Inc. | Ultrasound probe head |
| US9592091B2 (en) | 2011-08-30 | 2017-03-14 | Biosense Webster (Israel) Ltd. | Ablation catheter for vein anatomies |
| PL2939601T3 (pl) | 2011-09-06 | 2019-04-30 | Ezono Ag | Magnetyczny wyrób medyczny |
| US9028441B2 (en) | 2011-09-08 | 2015-05-12 | Corpak Medsystems, Inc. | Apparatus and method used with guidance system for feeding and suctioning |
| US10791950B2 (en) | 2011-09-30 | 2020-10-06 | Biosense Webster (Israel) Ltd. | In-vivo calibration of contact force-sensing catheters using auto zero zones |
| US8498686B2 (en) | 2011-10-04 | 2013-07-30 | Biosense Webster (Israel), Ltd. | Mapping catheter with spiral electrode assembly |
| JP5342628B2 (ja) * | 2011-10-05 | 2013-11-13 | 株式会社東芝 | X線撮像装置 |
| US20130303944A1 (en) | 2012-05-14 | 2013-11-14 | Intuitive Surgical Operations, Inc. | Off-axis electromagnetic sensor |
| US9452276B2 (en) | 2011-10-14 | 2016-09-27 | Intuitive Surgical Operations, Inc. | Catheter with removable vision probe |
| US9387048B2 (en) | 2011-10-14 | 2016-07-12 | Intuitive Surgical Operations, Inc. | Catheter sensor systems |
| US10238837B2 (en) | 2011-10-14 | 2019-03-26 | Intuitive Surgical Operations, Inc. | Catheters with control modes for interchangeable probes |
| US9211107B2 (en) | 2011-11-07 | 2015-12-15 | C. R. Bard, Inc. | Ruggedized ultrasound hydrogel insert |
| US20150112231A1 (en) | 2011-11-28 | 2015-04-23 | Remendium Labs Llc | Treatment of fecal incontinence |
| US8876726B2 (en) | 2011-12-08 | 2014-11-04 | Biosense Webster (Israel) Ltd. | Prevention of incorrect catheter rotation |
| US10456196B2 (en) | 2011-12-15 | 2019-10-29 | Biosense Webster (Israel) Ltd. | Monitoring and tracking bipolar ablation |
| US9427172B2 (en) | 2011-12-30 | 2016-08-30 | Mediguide Ltd. | Roll detection and six degrees of freedom sensor assembly |
| US9687289B2 (en) | 2012-01-04 | 2017-06-27 | Biosense Webster (Israel) Ltd. | Contact assessment based on phase measurement |
| AU2013215267A1 (en) | 2012-01-30 | 2014-08-14 | Remendium Labs Llc | Treatment of pelvic organ prolapse |
| US8808273B2 (en) | 2012-02-10 | 2014-08-19 | Biosense Webster (Israel) Ltd. | Electrophysiology catheter with mechanical use limiter |
| US9216056B2 (en) | 2012-03-02 | 2015-12-22 | Biosense Webster (Israel) Ltd. | Catheter for treatment of atrial flutter having single action dual deflection mechanism |
| US9314299B2 (en) | 2012-03-21 | 2016-04-19 | Biosense Webster (Israel) Ltd. | Flower catheter for mapping and ablating veinous and other tubular locations |
| US20130296729A1 (en) | 2012-05-04 | 2013-11-07 | Biosense Webster (Israel), Ltd. | Catheter having two-piece connector for a split handle assembly |
| US9717555B2 (en) | 2012-05-14 | 2017-08-01 | Biosense Webster (Israel), Ltd. | Catheter with helical end section for vessel ablation |
| US9439722B2 (en) | 2012-05-09 | 2016-09-13 | Biosense Webster (Israel) Ltd. | Ablation targeting nerves in or near the inferior vena cava and/or abdominal aorta for treatment of hypertension |
| US20130317339A1 (en) * | 2012-05-23 | 2013-11-28 | Biosense Webster (Israel), Ltd. | Endobronchial catheter |
| US10820885B2 (en) | 2012-06-15 | 2020-11-03 | C. R. Bard, Inc. | Apparatus and methods for detection of a removable cap on an ultrasound probe |
| ITMI20121049A1 (it) * | 2012-06-18 | 2013-12-19 | Ab Medica Spa | Gabbia per cavie da laboratorio e metodo per l¿alimentazione senza fili di un dispositivo bioelettronico impiantato in una cavia |
| CN104411238B (zh) | 2012-06-22 | 2017-07-18 | 皇家飞利浦有限公司 | 腔确定装置 |
| US9226710B2 (en) | 2012-06-25 | 2016-01-05 | Biosense Webster (Israel) Ltd. | Wireless catheter with base wireless transceiver |
| JP5981246B2 (ja) * | 2012-06-29 | 2016-08-31 | 東芝メディカルシステムズ株式会社 | 超音波診断装置及びセンサ選定装置 |
| US9956341B2 (en) | 2012-07-03 | 2018-05-01 | Milestone Scientific, Inc. | Drug infusion with pressure sensing and non-continuous flow for identification of and injection into fluid-filled anatomic spaces |
| KR101350742B1 (ko) * | 2012-07-25 | 2014-01-13 | 경북대학교 산학협력단 | 전기 자극을 이용한 광 간섭 단층 촬영 내시경 장치 및 방법 |
| US9895079B2 (en) * | 2012-09-26 | 2018-02-20 | Biosense Webster (Israel) Ltd. | Electropotential mapping |
| EP2908743B1 (de) | 2012-10-22 | 2018-08-22 | The Cleveland Clinic Foundation | Vorrichtung zur abzielung auf körpergewebe |
| DE102012021136A1 (de) | 2012-10-27 | 2014-04-30 | L&S Medtec GbR, vertretungsberechtigte Gesellschafter: Dr. Yuefei Liu, 89231 Neu-Ulm, Hans-Jörg Simon, 89155 Erbach | Vorrichtung und Multifunktionsgerät zur Beaufschlagung von Körpergewebe mit Stromimpulsen |
| US20140142438A1 (en) | 2012-11-19 | 2014-05-22 | Biosense Webster (Israel), Ltd. | Using location and force measurements to estimate tissue thickness |
| US8836937B2 (en) * | 2012-11-19 | 2014-09-16 | General Electric Company | Actuatable visual inspection device |
| US9375163B2 (en) * | 2012-11-28 | 2016-06-28 | Biosense Webster (Israel) Ltd. | Location sensing using a local coordinate system |
| US9023036B2 (en) | 2012-12-07 | 2015-05-05 | Biosense Webster (Israel) Ltd. | Lasso catheter with tip electrode |
| US9445725B2 (en) | 2012-12-17 | 2016-09-20 | Biosense Webster (Israel) Ltd. | Irrigated catheter tip with temperature sensor array |
| CN103028202A (zh) * | 2012-12-26 | 2013-04-10 | 上海交通大学 | 经颅超声刺激修复脑神经功能的装置及方法 |
| US9204820B2 (en) | 2012-12-31 | 2015-12-08 | Biosense Webster (Israel) Ltd. | Catheter with combined position and pressure sensing structures |
| US9204841B2 (en) | 2012-12-31 | 2015-12-08 | Biosense Webster (Israel) Ltd. | Catheter with serially connected sensing structures and methods of calibration and detection |
| US10537286B2 (en) | 2013-01-08 | 2020-01-21 | Biosense Webster (Israel) Ltd. | Catheter with multiple spines of different lengths arranged in one or more distal assemblies |
| US9295430B2 (en) | 2013-02-07 | 2016-03-29 | Biosense Webster (Israel), Ltd. | Operator controlled mixed modality feedback |
| GB201303917D0 (en) | 2013-03-05 | 2013-04-17 | Ezono Ag | System for image guided procedure |
| US9459087B2 (en) | 2013-03-05 | 2016-10-04 | Ezono Ag | Magnetic position detection system |
| US20140257080A1 (en) * | 2013-03-05 | 2014-09-11 | Ezono Ag | System for ultrasound image guided procedure |
| US9257220B2 (en) | 2013-03-05 | 2016-02-09 | Ezono Ag | Magnetization device and method |
| US9675272B2 (en) * | 2013-03-13 | 2017-06-13 | DePuy Synthes Products, Inc. | Methods, systems, and devices for guiding surgical instruments using radio frequency technology |
| US10314559B2 (en) | 2013-03-14 | 2019-06-11 | Inneroptic Technology, Inc. | Medical device guidance |
| US10602947B2 (en) | 2013-04-11 | 2020-03-31 | Biosense Webster (Israel), Ltd. | High density electrode structure |
| US10575743B2 (en) | 2013-04-11 | 2020-03-03 | Biosense Webster (Israel) Ltd. | High electrode density basket catheter |
| US10684986B2 (en) * | 2013-08-28 | 2020-06-16 | Biosense Webster (Israel) Ltd. | Double buffering with atomic transactions for the persistent storage of real-time data flows |
| US10070932B2 (en) | 2013-08-29 | 2018-09-11 | Given Imaging Ltd. | System and method for maneuvering coils power optimization |
| US10368764B2 (en) * | 2013-09-12 | 2019-08-06 | Topera, Inc. | System and method to select signal segments for analysis of a biological rhythm disorder |
| US9204929B2 (en) | 2013-09-16 | 2015-12-08 | Biosense Webster (Israel) Ltd. | Basket catheter with deflectable spine |
| US10687889B2 (en) | 2013-10-11 | 2020-06-23 | Biosense Webster (Israel) Ltd. | Patient-specific pre-shaped cardiac catheter |
| US9743991B2 (en) | 2013-10-21 | 2017-08-29 | Biosense Webster (Israel) Ltd. | Real-time estimation of tissue perforation risk during minimally invasive medical procedure |
| US9241656B2 (en) | 2013-10-25 | 2016-01-26 | Biosense Webster (Israel) Ltd. | Serially connected autonomous location pads |
| DE102013222230A1 (de) | 2013-10-31 | 2015-04-30 | Fiagon Gmbh | Chirurgisches Instrument |
| US10105073B2 (en) | 2013-11-21 | 2018-10-23 | Biosense Webster (Israel) Ltd | Flexible multiple-arm diagnostic catheter |
| US20150157405A1 (en) | 2013-12-05 | 2015-06-11 | Biosense Webster (Israel) Ltd. | Needle catheter utilizing optical spectroscopy for tumor identification and ablation |
| US9474466B2 (en) * | 2013-12-23 | 2016-10-25 | Biosense Webster (Israel) Ltd. | Low-profile location pad for magnetic-based intra-body probe tracking system |
| CN103654856A (zh) * | 2013-12-23 | 2014-03-26 | 中国科学院苏州生物医学工程技术研究所 | 一种小型实时自由臂三维超声成像系统 |
| US9696131B2 (en) | 2013-12-24 | 2017-07-04 | Biosense Webster (Israel) Ltd. | Adaptive fluoroscope location for the application of field compensation |
| US10278775B2 (en) | 2013-12-31 | 2019-05-07 | Biosense Webster (Israel) Ltd. | Catheter utilizing optical spectroscopy for measuring tissue contact area |
| CA2936061A1 (en) | 2014-01-06 | 2015-07-09 | Remendium Labs Llc | System and method for kegel training |
| US9480416B2 (en) | 2014-01-17 | 2016-11-01 | Biosense Webster (Israel) Ltd. | Signal transmission using catheter braid wires |
| US9380953B2 (en) | 2014-01-29 | 2016-07-05 | Biosense Webster (Israel) Ltd. | Hybrid bipolar/unipolar detection of activation wavefront |
| US9554718B2 (en) | 2014-01-29 | 2017-01-31 | Biosense Webster (Israel) Ltd. | Double bipolar configuration for atrial fibrillation annotation |
| CN107205719B (zh) * | 2014-02-05 | 2021-07-30 | 韦拉索恩股份有限公司 | 一种校正超音波扫描器的方法 |
| EP3073910B1 (de) | 2014-02-06 | 2020-07-15 | C.R. Bard, Inc. | Systeme zur führung und platzierung einer intravaskulären vorrichtung |
| US9986949B2 (en) | 2014-03-05 | 2018-06-05 | Biosense Webster (Israel) Ltd. | Multi-arm catheter with signal transmission over braid wires |
| US10182733B2 (en) | 2014-03-11 | 2019-01-22 | Biosense Webster (Israel) Ltd. | Multiple LED sensors on a fiberoptic cable used as a catheter |
| US9848943B2 (en) | 2014-04-18 | 2017-12-26 | Biosense Webster (Israel) Ltd. | Ablation catheter with dedicated fluid paths and needle centering insert |
| US9757182B2 (en) | 2014-06-02 | 2017-09-12 | Biosense Webster (Israel) Ltd. | Identification and visualization of gaps between cardiac ablation sites |
| US10952593B2 (en) | 2014-06-10 | 2021-03-23 | Covidien Lp | Bronchoscope adapter |
| US9848799B2 (en) | 2014-06-25 | 2017-12-26 | Biosense Webster (Israel) Ltd | Real-time generation of MRI slices |
| US9754372B2 (en) | 2014-08-15 | 2017-09-05 | Biosense Webster (Israel) Ltd. | Marking of fluoroscope field-of-view |
| US9901406B2 (en) | 2014-10-02 | 2018-02-27 | Inneroptic Technology, Inc. | Affected region display associated with a medical device |
| US9721379B2 (en) | 2014-10-14 | 2017-08-01 | Biosense Webster (Israel) Ltd. | Real-time simulation of fluoroscopic images |
| US10231778B2 (en) | 2014-10-20 | 2019-03-19 | Biosense Webster (Israel) Ltd. | Methods for contemporaneous assessment of renal denervation |
| US10674933B2 (en) | 2014-10-22 | 2020-06-09 | Biosense Webster (Israel) Ltd. | Enlargement of tracking volume by movement of imaging bed |
| US9314208B1 (en) | 2014-10-28 | 2016-04-19 | Biosense Webster (Israel) Ltd. | Basket catheter with microelectrode array distal tip |
| US10869650B2 (en) | 2014-11-06 | 2020-12-22 | Covidien Lp | System for tracking and imaging a treatment probe |
| US10758302B2 (en) | 2014-11-11 | 2020-09-01 | Biosense Webster (Israel) Ltd. | Irrigated ablation catheter with sensor array |
| US9788893B2 (en) | 2014-11-20 | 2017-10-17 | Biosense Webster (Israel) Ltd. | Catheter with soft distal tip for mapping and ablating tubular region |
| US9724154B2 (en) | 2014-11-24 | 2017-08-08 | Biosense Webster (Israel) Ltd. | Irrigated ablation catheter with multiple sensors |
| US10188467B2 (en) | 2014-12-12 | 2019-01-29 | Inneroptic Technology, Inc. | Surgical guidance intersection display |
| US20160174864A1 (en) | 2014-12-18 | 2016-06-23 | Biosense Webster (Israel) Ltd. | Far Field-Insensitive Intracardiac Catheter Electrodes |
| US9421061B2 (en) | 2014-12-18 | 2016-08-23 | Biosense Webster (Israel) Ltd. | Ventricular far field reduction |
| US9782099B2 (en) | 2014-12-31 | 2017-10-10 | Biosense Webster (Israel) Ltd. | Basket catheter with improved spine flexibility |
| US10973584B2 (en) | 2015-01-19 | 2021-04-13 | Bard Access Systems, Inc. | Device and method for vascular access |
| US9833161B2 (en) | 2015-02-09 | 2017-12-05 | Biosense Webster (Israel) Ltd. | Basket catheter with far-field electrode |
| US10307078B2 (en) | 2015-02-13 | 2019-06-04 | Biosense Webster (Israel) Ltd | Training of impedance based location system using registered catheter images |
| US10105117B2 (en) | 2015-02-13 | 2018-10-23 | Biosense Webster (Israel) Ltd. | Compensation for heart movement using coronary sinus catheter images |
| EP3067091B1 (de) * | 2015-03-13 | 2020-07-29 | BIOTRONIK SE & Co. KG | Dislokationssensor |
| CN104783894A (zh) * | 2015-04-22 | 2015-07-22 | 杭州睿笛生物科技有限公司 | 肿瘤电消融心电监护自动保护装置 |
| US10463425B2 (en) | 2015-05-04 | 2019-11-05 | Biosense Webster (Israel) Ltd. | RF ablation with acoustic feedback |
| US10426555B2 (en) | 2015-06-03 | 2019-10-01 | Covidien Lp | Medical instrument with sensor for use in a system and method for electromagnetic navigation |
| US20160354049A1 (en) | 2015-06-04 | 2016-12-08 | Biosense Webster (Israel) Ltd. | Registration of coronary sinus catheter image |
| US10349890B2 (en) | 2015-06-26 | 2019-07-16 | C. R. Bard, Inc. | Connector interface for ECG-based catheter positioning system |
| US11109774B2 (en) | 2015-07-06 | 2021-09-07 | Biosense Webster (Israel) Ltd. | Flat location pad using nonconcentric coils |
| JP6466273B2 (ja) | 2015-07-14 | 2019-02-06 | 国立大学法人 筑波大学 | 心電図解析装置 |
| US9949700B2 (en) | 2015-07-22 | 2018-04-24 | Inneroptic Technology, Inc. | Medical device approaches |
| US9895073B2 (en) | 2015-07-29 | 2018-02-20 | Biosense Webster (Israel) Ltd. | Dual basket catheter |
| AU2016210644A1 (en) | 2015-08-12 | 2017-03-02 | Biosense Webster (Israel) Ltd. | High electrode density basket catheter |
| US10987045B2 (en) | 2015-09-14 | 2021-04-27 | Biosense Webster (Israel) Ltd. | Basket catheter with individual spine control |
| US10517668B2 (en) | 2015-09-14 | 2019-12-31 | Boisense Webster (Israel) Ltd. | Dual node multiray electrode catheter |
| US20170071543A1 (en) | 2015-09-14 | 2017-03-16 | Biosense Webster (Israel) Ltd. | Convertible basket catheter |
| US10357173B2 (en) | 2015-09-14 | 2019-07-23 | Biosense Webster (Israel) Ltd. | Dual multiray electrode catheter |
| US10524858B2 (en) | 2015-09-14 | 2020-01-07 | Biosense Webster (Israel) Ltd. | Dual node multiray electrode catheter |
| US11007007B2 (en) | 2015-10-13 | 2021-05-18 | Biosense Webster (Israel) Ltd. | Self-centering multiray ablation catheter |
| US10687890B2 (en) | 2015-10-13 | 2020-06-23 | Biosense Webster (Israel) Ltd. | Lasso catheter with moveable ablation spine |
| US10220180B2 (en) | 2015-10-16 | 2019-03-05 | Milestone Scientific, Inc. | Method and apparatus for performing a peripheral nerve block |
| US9962134B2 (en) | 2015-10-28 | 2018-05-08 | Medtronic Navigation, Inc. | Apparatus and method for maintaining image quality while minimizing X-ray dosage of a patient |
| US10813689B2 (en) | 2015-11-25 | 2020-10-27 | Biosense Webster (Israel) Ltd. | Ablation catheter with radial force detection |
| US10285752B2 (en) | 2015-12-07 | 2019-05-14 | Biosense Webster (Israel) Ltd. | Multilayer split ablation electrode |
| US10758304B2 (en) | 2015-12-07 | 2020-09-01 | Biosense Webster (Israel) Ltd. | Basket catheter with an improved seal |
| AU2016259312A1 (en) | 2015-12-09 | 2017-06-29 | Biosense Webster (Israel) Ltd. | Dual node multiray electrode catheter |
| AU2016259372A1 (en) | 2015-12-09 | 2017-06-29 | Biosense Webster (Israel) Ltd. | Dual node multiray electrode catheter |
| US10136945B2 (en) | 2015-12-09 | 2018-11-27 | Biosense Webster (Israel) Ltd. | Ablation catheter with light-based contact sensors |
| US10362952B2 (en) | 2015-12-10 | 2019-07-30 | Biosense Webster (Israel) Ltd. | Stabilized spine electrophysiologic catheter |
| US10362953B2 (en) | 2015-12-11 | 2019-07-30 | Biosense Webster (Israel) Ltd. | Electrode array catheter with interconnected framework |
| US10231789B2 (en) | 2015-12-18 | 2019-03-19 | Biosense Webster (Israel) Ltd. | Using force sensor to give angle of ultrasound beam |
| US10078713B2 (en) | 2015-12-24 | 2018-09-18 | Biosense Webster (Israel) Ltd. | Global mapping catheter contact optimization |
| US10282888B2 (en) | 2016-01-28 | 2019-05-07 | Biosense Webster (Israel) Ltd. | High definition coloring of heart chambers |
| US11000207B2 (en) | 2016-01-29 | 2021-05-11 | C. R. Bard, Inc. | Multiple coil system for tracking a medical device |
| US9675319B1 (en) | 2016-02-17 | 2017-06-13 | Inneroptic Technology, Inc. | Loupe display |
| US10413272B2 (en) | 2016-03-08 | 2019-09-17 | Covidien Lp | Surgical tool with flex circuit ultrasound sensor |
| US10314505B2 (en) | 2016-03-15 | 2019-06-11 | Biosense Webster (Israel) Ltd. | Asymmetric basket catheter |
| US10285610B2 (en) | 2016-03-23 | 2019-05-14 | Biosense Webster (Israel) Ltd. | Dispersed irrigation configuration for catheter tip design |
| US10362991B2 (en) | 2016-04-04 | 2019-07-30 | Biosense Webster (Israel) Ltd. | Convertible basket catheter |
| US20170296251A1 (en) | 2016-04-13 | 2017-10-19 | Biosense Webster (Israel) Ltd. | Basket catheter with prestrained framework |
| US20170296262A1 (en) | 2016-04-13 | 2017-10-19 | Biosense Webster (Israel) Ltd. | Pulmonary-vein cork device with ablation guiding trench |
| US9974460B2 (en) | 2016-05-06 | 2018-05-22 | Biosense Webster (Israel) Ltd. | Basket-shaped catheter with improved distal hub |
| US10537260B2 (en) | 2016-05-06 | 2020-01-21 | Biosense Webster (Israel) Ltd. | Varying diameter catheter distal end design for decreased distal hub size |
| US10478254B2 (en) | 2016-05-16 | 2019-11-19 | Covidien Lp | System and method to access lung tissue |
| US10987091B2 (en) | 2016-05-17 | 2021-04-27 | Biosense Webster (Israel) Ltd. | System and method for catheter connections |
| US10772566B2 (en) | 2016-05-17 | 2020-09-15 | Biosense Weber (Israel) Ltd. | Multi-electrode catheter spine and method of making the same |
| US11116419B2 (en) * | 2016-06-01 | 2021-09-14 | Becton, Dickinson And Company | Invasive medical devices including magnetic region and systems and methods |
| US10349855B2 (en) | 2016-06-10 | 2019-07-16 | Biosense Webster (Israel) Ltd. | Identification and visualization of cardiac activation sequence in multi-channel recordings |
| US10376221B2 (en) | 2016-07-06 | 2019-08-13 | Biosense Webster (Israel) Ltd. | Automatic creation of multiple electroanatomic maps |
| GB201611819D0 (en) * | 2016-07-07 | 2016-08-17 | Univ Court Of The Univ Of Edinburgh The | Imaging method and apparatus |
| SG11201900783PA (en) | 2016-07-29 | 2019-02-27 | Renovia Inc | Devices, systems, and methods for training pelvic floor muscles |
| US10321913B2 (en) | 2016-08-04 | 2019-06-18 | Biosense Webster (Israel) Ltd. | Balloon positioning in a sinuplasty procedure |
| US20180085064A1 (en) | 2016-09-29 | 2018-03-29 | Biosense Webster (Israel) Ltd. | Basket catheter conforming to organ using strain-relief elements |
| US20180098816A1 (en) | 2016-10-06 | 2018-04-12 | Biosense Webster (Israel) Ltd. | Pre-Operative Registration of Anatomical Images with a Position-Tracking System Using Ultrasound |
| US10631935B2 (en) | 2016-10-25 | 2020-04-28 | Biosense Webster (Israel) Ltd. | Head registration using a personalized gripper |
| US10603472B2 (en) | 2016-10-25 | 2020-03-31 | Biosense Webster (Israel) Ltd. | Guidewires having improved mechanical strength and electromagnetic shielding |
| US10278778B2 (en) | 2016-10-27 | 2019-05-07 | Inneroptic Technology, Inc. | Medical device navigation using a virtual 3D space |
| US10751126B2 (en) | 2016-10-28 | 2020-08-25 | Covidien Lp | System and method for generating a map for electromagnetic navigation |
| US10638952B2 (en) | 2016-10-28 | 2020-05-05 | Covidien Lp | Methods, systems, and computer-readable media for calibrating an electromagnetic navigation system |
| US10517505B2 (en) | 2016-10-28 | 2019-12-31 | Covidien Lp | Systems, methods, and computer-readable media for optimizing an electromagnetic navigation system |
| US10615500B2 (en) | 2016-10-28 | 2020-04-07 | Covidien Lp | System and method for designing electromagnetic navigation antenna assemblies |
| US10446931B2 (en) | 2016-10-28 | 2019-10-15 | Covidien Lp | Electromagnetic navigation antenna assembly and electromagnetic navigation system including the same |
| US10792106B2 (en) | 2016-10-28 | 2020-10-06 | Covidien Lp | System for calibrating an electromagnetic navigation system |
| US10722311B2 (en) | 2016-10-28 | 2020-07-28 | Covidien Lp | System and method for identifying a location and/or an orientation of an electromagnetic sensor based on a map |
| US10418705B2 (en) | 2016-10-28 | 2019-09-17 | Covidien Lp | Electromagnetic navigation antenna assembly and electromagnetic navigation system including the same |
| PL235947B1 (pl) * | 2016-11-01 | 2020-11-16 | Endoscope Spolka Z Ograniczona Odpowiedzialnoscia | Endoskop giętki |
| CN106420056B (zh) * | 2016-11-03 | 2023-11-03 | 中国人民解放军总医院 | 器械以及器械的定位与引导装置及其方法 |
| US10403053B2 (en) | 2016-11-15 | 2019-09-03 | Biosense Webster (Israel) Ltd. | Marking sparse areas on maps |
| US10918306B2 (en) | 2016-12-13 | 2021-02-16 | Biosense Webster (Israel) Ltd. | Catheter splines with embedded circuit elements |
| US10327851B2 (en) | 2016-12-13 | 2019-06-25 | Biosense Webster (Israel) Ltd. | Method and apparatus for ablation planning and control |
| US10588700B2 (en) | 2016-12-19 | 2020-03-17 | Boston Scientific Scimed Inc. | Distortion suppression in electromagnetic tracking systems |
| US10420612B2 (en) | 2016-12-22 | 2019-09-24 | Biosense Webster (Isreal) Ltd. | Interactive anatomical mapping and estimation of anatomical mapping quality |
| US20180184982A1 (en) | 2017-01-05 | 2018-07-05 | Biosense Webster (Israel) Ltd. | Hybrid balloon basket catheter |
| US20180192958A1 (en) | 2017-01-06 | 2018-07-12 | Biosense Webster (Israel) Ltd. | Multi-electrode assembly with controlled folding mechanism |
| US10932685B2 (en) | 2017-01-09 | 2021-03-02 | Biosense Webster (Israel) Ltd. | Catheter with supporting structure having variable dimensions |
| US11246534B2 (en) | 2017-01-23 | 2022-02-15 | Biosense Webster (Israel) Ltd. | Basket catheter made from flexible circuit board with mechanical strengthening |
| US20180228534A1 (en) | 2017-02-15 | 2018-08-16 | Biosense Webster (Israel) Ltd. | Interleaved ablation electrodes |
| US20180228393A1 (en) | 2017-02-15 | 2018-08-16 | Biosense Webster (Israel) Ltd. | Electrophysiologic device construction |
| US11304642B2 (en) | 2017-02-15 | 2022-04-19 | Biosense Webster (Israel) Ltd. | Multi-axial position sensors printed on a folded flexible circuit board |
| US10758716B2 (en) | 2017-02-15 | 2020-09-01 | Biosense Webster (Israel) Ltd. | Planetary gear assembly for sputtering multiple balloon catheter distal ends |
| US10660574B2 (en) | 2017-03-08 | 2020-05-26 | Biosense Webster (Israel) Ltd. | Low cost planar spring for force sensor |
| US11317965B2 (en) | 2017-03-08 | 2022-05-03 | Biosense Webster (Israel) Ltd. | Reduced size force sensor |
| US11116450B2 (en) | 2017-03-09 | 2021-09-14 | Biosense Webster (Israel) Ltd. | Electrode assembly having spines with controlled flexibility |
| US10537350B2 (en) | 2017-03-28 | 2020-01-21 | Biosense Webster (Israel) Ltd. | Medical device having a reusable position sensor |
| WO2018191182A1 (en) * | 2017-04-11 | 2018-10-18 | St. Jude Medical, Cardiology Division, Inc. | Ultrasonic transducer array catheter with integrated coupler |
| US10643330B2 (en) | 2017-04-21 | 2020-05-05 | Biosense Webster (Israel) Ltd. | Registration of an anatomical image with a position-tracking coordinate system based on proximity to bone tissue |
| US10314658B2 (en) | 2017-04-21 | 2019-06-11 | Biosense Webster (Israel) Ltd. | Registration of an anatomical image with a position-tracking coordinate system based on visual proximity to bone tissue |
| US20180310987A1 (en) | 2017-04-27 | 2018-11-01 | Biosense Webster (Israel) Ltd. | Systems and processes for map-guided automatic cardiac ablation |
| US11471595B2 (en) | 2017-05-04 | 2022-10-18 | Milestone Scientific, Inc. | Method and apparatus for performing a peripheral nerve block |
| US11612437B2 (en) | 2017-05-10 | 2023-03-28 | Biosense Webster (Israel) Ltd. | Location pad with improved immunity to interference |
| US10874327B2 (en) | 2017-05-19 | 2020-12-29 | Covidien Lp | Systems and methods for tracking and imaging a treatment probe having an integrated sensor |
| US10578737B2 (en) | 2017-05-19 | 2020-03-03 | Biosense Webster (Israel) Ltd. | Using proximal location sensors to improve accuracy and location immunity to interference |
| US10390891B2 (en) | 2017-06-13 | 2019-08-27 | Biosense Webster (Israel) Ltd. | Hologram lens for positioning an orthopedic implant |
| US10405776B2 (en) | 2017-06-13 | 2019-09-10 | Biosense Webster (Israel) Ltd. | Positioning tool for an orthopedic implant |
| CN110769731B (zh) * | 2017-06-15 | 2022-02-25 | 奥林巴斯株式会社 | 内窥镜系统、内窥镜用处理系统、图像处理方法 |
| US10456056B2 (en) | 2017-06-21 | 2019-10-29 | Biosense Webster (Israel) Ltd. | Combination torso vest to map cardiac electrophysiology |
| US10514719B2 (en) | 2017-06-27 | 2019-12-24 | Biosense Webster (Israel) Ltd. | System and method for synchronization among clocks in a wireless system |
| US11109788B2 (en) | 2017-07-17 | 2021-09-07 | Biosense Webster (Israel) Ltd. | Catheter with Fibonacci distributed electrodes |
| US11317966B2 (en) | 2017-07-19 | 2022-05-03 | Biosense Webster (Israel) Ltd. | Impedance-based position tracking performance using scattered interpolant |
| US11259879B2 (en) | 2017-08-01 | 2022-03-01 | Inneroptic Technology, Inc. | Selective transparency to assist medical device navigation |
| US10898272B2 (en) | 2017-08-08 | 2021-01-26 | Biosense Webster (Israel) Ltd. | Visualizing navigation of a medical device in a patient organ using a dummy device and a physical 3D model |
| US11523942B2 (en) | 2017-08-10 | 2022-12-13 | Biosense Webster (Israel) Ltd. | Medical suction tool for a Eustachian tube |
| DE102017008148A1 (de) | 2017-08-29 | 2019-02-28 | Joimax Gmbh | Sensoreinheit, intraoperatives Navigationssystem und Verfahren zur Detektion eines chirurgischen Instruments |
| US20190059818A1 (en) | 2017-08-29 | 2019-02-28 | Biosense Webster (Israel) Ltd. | Balloon advancement mechanism |
| US10506991B2 (en) | 2017-08-31 | 2019-12-17 | Biosense Webster (Israel) Ltd. | Displaying position and optical axis of an endoscope in an anatomical image |
| US10452263B2 (en) | 2017-09-13 | 2019-10-22 | Biosense Webster (Israel) Ltd. | Patient face as touchpad user interface |
| US10517612B2 (en) | 2017-09-19 | 2019-12-31 | Biosense Webster (Israel) Ltd. | Nail hole guiding system |
| US10532187B2 (en) | 2017-10-17 | 2020-01-14 | Biosense Webster (Israel) Ltd. | Reusable catheter handle system |
| US10874824B2 (en) | 2017-10-18 | 2020-12-29 | Biosense Webster (Israel) Ltd. | High-volume manufacturing of catheters comprising electrodes having low impedance at low frequency |
| KR102117370B1 (ko) * | 2017-10-24 | 2020-06-01 | 재단법인 대구경북첨단의료산업진흥재단 | 카테터 팁 위치추적 장치 및 그 방법 |
| US10893902B2 (en) | 2017-10-25 | 2021-01-19 | Biosense Webster (Israel) Ltd. | Integrated resistive filters in catheter distal end |
| US10874456B2 (en) | 2017-10-25 | 2020-12-29 | Biosense Webster (Israel) Ltd. | Integrated LC filters in catheter distal end |
| US11179203B2 (en) | 2017-10-26 | 2021-11-23 | Biosense Webster (Israel) Ltd. | Position-tracking-enabling connector for an ear-nose-throat (ENT) tool |
| US11000206B2 (en) | 2017-10-26 | 2021-05-11 | Biosense Webster (Israel) Ltd. | Esophageal probe with transmitting coils |
| US10765475B2 (en) | 2017-10-31 | 2020-09-08 | Biosense Webster (Israel) Ltd. | All-in-one spiral catheter |
| US11219489B2 (en) | 2017-10-31 | 2022-01-11 | Covidien Lp | Devices and systems for providing sensors in parallel with medical tools |
| US10682496B2 (en) | 2017-11-16 | 2020-06-16 | Biosense Webster (Israel) Ltd. | Catheter handle |
| US20190159843A1 (en) | 2017-11-28 | 2019-05-30 | Biosense Webster (Israel) Ltd. | Low profile dual pad magnetic field location system with self tracking |
| US20190175262A1 (en) | 2017-12-11 | 2019-06-13 | Biosense Webster (Israel) Ltd. | Balloon catheter distal end comprising electrodes and thermocouples |
| US10595938B2 (en) | 2017-12-13 | 2020-03-24 | Biosense Webster (Israel) Ltd. | Estimating cardiac catheter proximity to the esophagus |
| US11135008B2 (en) | 2017-12-13 | 2021-10-05 | Biosense Webster (Israel) Ltd. | Graphical user interface (GUI) for displaying estimated cardiac catheter proximity to the esophagus |
| US10575746B2 (en) | 2017-12-14 | 2020-03-03 | Biosense Webster (Israel) Ltd. | Epicardial mapping |
| CN108042203B (zh) * | 2017-12-21 | 2020-07-17 | 清华大学深圳研究生院 | 一种基于超声测距的心脏三维标测系统及方法 |
| US20190192280A1 (en) | 2017-12-21 | 2019-06-27 | Biosense Webster (Israel) Ltd. | System for Adjusting the Shape of a Breast Implant |
| US11058497B2 (en) | 2017-12-26 | 2021-07-13 | Biosense Webster (Israel) Ltd. | Use of augmented reality to assist navigation during medical procedures |
| US11116420B2 (en) | 2017-12-26 | 2021-09-14 | Biosense Webster (Israel) Ltd. | Monitoring distance to selected anatomical structures during a procedure |
| US10806365B2 (en) | 2017-12-26 | 2020-10-20 | Biosense Webster (Israel) Ltd. | Impedance-based position tracking performance using principal component analysis |
| US10974031B2 (en) | 2017-12-28 | 2021-04-13 | Biosense Webster (Israel) Ltd. | Balloon catheter with internal distal end |
| US10918310B2 (en) | 2018-01-03 | 2021-02-16 | Biosense Webster (Israel) Ltd. | Fast anatomical mapping (FAM) using volume filling |
| US10952797B2 (en) | 2018-01-02 | 2021-03-23 | Biosense Webster (Israel) Ltd. | Tracking a rigid tool in a patient body |
| US11517715B2 (en) | 2018-01-02 | 2022-12-06 | Biosense Webster (Israel) Ltd. | Deflectable medical probe |
| US10876902B2 (en) | 2018-01-10 | 2020-12-29 | Biosense Webster (Israel) Ltd. | Position-controlled thermocouple |
| US11054315B2 (en) | 2018-01-10 | 2021-07-06 | Biosense Webster (Israel) Ltd. | Thermally isolated thermocouple |
| US10801899B2 (en) | 2018-01-10 | 2020-10-13 | Biosense Webster (Israel) Ltd. | Position-biasing thermocouple |
| US11389116B2 (en) | 2018-01-19 | 2022-07-19 | Biosense Webster (Israel) Ltd. | Apparatus and method for heartbeat classification based on time sequence and morphology of intracardiac and body surface electrocardiogram (ECG) signals |
| US11484365B2 (en) | 2018-01-23 | 2022-11-01 | Inneroptic Technology, Inc. | Medical image guidance |
| US11233369B2 (en) | 2018-03-06 | 2022-01-25 | Biosense Webster (Israel) Ltd. | Positioning cartridge for electrode |
| US10966783B2 (en) * | 2018-03-19 | 2021-04-06 | Biosense Webster (Israel) Ltd. | Catheter with multifunctional microinjection—molded housing |
| US11219488B2 (en) | 2018-04-25 | 2022-01-11 | Biosense Webster (Israel) Ltd. | Determining catheter touch location using force-vector information |
| US10722141B2 (en) | 2018-04-30 | 2020-07-28 | Biosense Webster (Israel) Ltd. | Active voltage location (AVL) resolution |
| US11864825B2 (en) | 2018-05-02 | 2024-01-09 | Biosense Webster (Israel) Ltd. | Ablation catheter with selective radial energy delivery |
| US11806083B2 (en) | 2018-05-14 | 2023-11-07 | Biosense Webster (Israel) Ltd. | Correcting map shifting of a position tracking system including repositioning the imaging system and the patient in response to detecting magnetic interference |
| US10976148B2 (en) | 2018-05-15 | 2021-04-13 | Biosense Webster (Israel) Ltd. | Calibration jig for a catheter comprising a position sensor |
| US20190350489A1 (en) | 2018-05-21 | 2019-11-21 | Biosense Webster (Israel) Ltd. | Scaling impedance location measurements of a balloon catheter |
| US11877840B2 (en) | 2018-05-29 | 2024-01-23 | Biosense Webster (Israel) Ltd. | Catheter localization using current location combined with magnetic-field sensing |
| US11123135B2 (en) | 2018-05-30 | 2021-09-21 | Biosense Webster (Israel) Ltd. | Enhanced large-diameter balloon catheter |
| US11547391B2 (en) | 2018-06-14 | 2023-01-10 | Biosense Webster (Israel) Ltd. | Acoustic phantom and method for intracardiac ultrasound localization catheter |
| US11218142B2 (en) | 2018-06-25 | 2022-01-04 | Biosense Webster (Israel) Ltd. | Signal quality in a multiplexing system by actively disconnecting unused connections |
| US10799147B2 (en) | 2018-06-26 | 2020-10-13 | Biosense Webster (Israel) Ltd. | Magnetic pickup cancellation by compensation leads |
| US11173285B2 (en) | 2018-06-28 | 2021-11-16 | Biosense Webster (Israel) Ltd. | Producing a guidewire comprising a position sensor |
| US12102781B2 (en) | 2018-06-29 | 2024-10-01 | Biosense Webster (Israel) Ltd. | Reinforcement for irrigated electrophysiology balloon catheter with flexible-circuit electrodes |
| US10912484B2 (en) | 2018-07-09 | 2021-02-09 | Biosense Webster (Israel) Ltd. | Multiplexing of high count electrode catheter(s) |
| US11672461B2 (en) | 2018-07-16 | 2023-06-13 | Biosense Webster (Israel) Ltd. | Flexible circuit with location and force-sensor coils |
| US20200038638A1 (en) | 2018-08-06 | 2020-02-06 | Biosense Webster (Israel) Ltd. | Balloon positioning using magnetic resonance imaging (mri) blood flow measurements |
| US20200046420A1 (en) | 2018-08-08 | 2020-02-13 | Biosense Webster (Israel) Ltd. | Contact force sensor comprising tuned amplifiers |
| US11399735B2 (en) | 2018-08-09 | 2022-08-02 | Biosense Webster (Israel) Ltd. | Nonlinear electric field location system |
| US11364368B2 (en) | 2018-08-14 | 2022-06-21 | Biosense Webster (Israel) Ltd. | Guidewire with an integrated flexible tube |
| US20200054282A1 (en) | 2018-08-14 | 2020-02-20 | Biosense Webster (Israel) Ltd. | Guidewire with an integrated optical fiber |
| JP7023368B2 (ja) * | 2018-08-23 | 2022-02-21 | 富士フイルム株式会社 | 内視鏡システム及び内視鏡検査装置の作動方法 |
| US20200069218A1 (en) | 2018-09-04 | 2020-03-05 | Biosense Webster (Israel) Ltd. | Single axis sensor (sas) with hall sensor using external magnet |
| US10952637B2 (en) | 2018-09-25 | 2021-03-23 | Biosense Webster (Israel) Ltd. | Radiofrequency (RF) transmission system to find tissue proximity |
| CN112867443B (zh) | 2018-10-16 | 2024-04-26 | 巴德阿克塞斯系统股份有限公司 | 用于建立电连接的安全装备连接系统及其方法 |
| CN109171998B (zh) | 2018-10-22 | 2020-07-21 | 西安交通大学 | 基于超声深度学习的热消融区域识别监测成像方法与系统 |
| US10973588B2 (en) * | 2018-10-24 | 2021-04-13 | Biosense Webster (Israel) Ltd. | On-the-fly calibration for catheter location and orientation |
| US11246505B2 (en) | 2018-11-01 | 2022-02-15 | Biosense Webster (Israel) Ltd. | Using radiofrequency (RF) transmission system to find opening in tissue wall |
| US11751936B2 (en) | 2018-11-21 | 2023-09-12 | Biosense Webster (Israel) Ltd. | Configuring perimeter of balloon electrode as location sensor |
| US11364084B2 (en) | 2018-11-21 | 2022-06-21 | Biosense Webster (Israel) Ltd. | Contact force compensation in a robot manipulator |
| EP3890616A4 (de) * | 2018-12-07 | 2022-08-24 | Veran Medical Technologies, Inc. | Perkutanes kathetersystem und verfahren zur schnellen diagnose von lungenkrankheiten |
| US11324556B2 (en) | 2018-12-11 | 2022-05-10 | Biosense Webster (Israel) Ltd. | Combining catheter visualization from different coordinate frames |
| US20200197097A1 (en) | 2018-12-20 | 2020-06-25 | Biosense Webster (Israel) Ltd. | Catheter representation using a dynamic spring model |
| US20200205887A1 (en) | 2018-12-27 | 2020-07-02 | Biosense Webster (Israel) Ltd. | Ablation Balloon Catheter Allowing Blood Flow |
| US11457995B2 (en) | 2018-12-27 | 2022-10-04 | Biosense Webster (Israel) Ltd. | Accurate balloon computation and visualization |
| US11672952B2 (en) | 2018-12-28 | 2023-06-13 | Biosense Webster (Israel) Ltd. | Finding elongation of expandable distal end of catheter |
| US20200205889A1 (en) | 2018-12-28 | 2020-07-02 | Biosense Webster (Israel) Ltd. | Balloon Catheter with Distal End Having a Recessed Shape |
| US11207016B2 (en) | 2018-12-28 | 2021-12-28 | Biosense Webster (Israel) Ltd. | Mapping ECG signals using a multipole electrode assembly |
| US11698059B2 (en) | 2018-12-29 | 2023-07-11 | Biosense Webster (Israel) Ltd. | Disposable dual-action reciprocating pump assembly |
| US11730882B2 (en) | 2018-12-29 | 2023-08-22 | Biosense Webster (Israel) Ltd. | Dual-action irrigation pump with variable speed to provide constant fluid flow |
| US12011211B2 (en) | 2018-12-29 | 2024-06-18 | Biosense Webster (Israel) Ltd. | Irrigation pump with ablation and non-ablation operational modes |
| US11642172B2 (en) | 2019-03-05 | 2023-05-09 | Biosense Webster (Israel) Ltd. | Showing catheter in brain |
| USD888948S1 (en) | 2019-04-02 | 2020-06-30 | Renovia Inc. | Intravaginal device |
| US10736207B1 (en) | 2019-04-03 | 2020-08-04 | Biosense Webster (Israel) Ltd. | Canceling magnetic pickup using three-dimensional wiring assembly |
| USD898911S1 (en) | 2019-04-03 | 2020-10-13 | Renovia Inc. | Intravaginal device assembly |
| EP3719749A1 (de) | 2019-04-03 | 2020-10-07 | Fiagon AG Medical Technologies | Registrierungsverfahren und -einrichtung |
| USD889649S1 (en) | 2019-04-05 | 2020-07-07 | Renovia Inc. | Intravaginal device |
| USD896958S1 (en) | 2019-04-11 | 2020-09-22 | Renovia Inc. | Intravaginal device |
| USD899593S1 (en) | 2019-04-12 | 2020-10-20 | Renovia Inc. | Intravaginal device |
| USD897530S1 (en) | 2019-04-23 | 2020-09-29 | Renovia Inc. | Intravaginal device |
| USD896959S1 (en) | 2019-04-23 | 2020-09-22 | Renovia Inc. | Intravaginal device |
| US11172984B2 (en) | 2019-05-03 | 2021-11-16 | Biosense Webster (Israel) Ltd. | Device, system and method to ablate cardiac tissue |
| US10646660B1 (en) | 2019-05-16 | 2020-05-12 | Milestone Scientific, Inc. | Device and method for identification of a target region |
| US10639106B1 (en) | 2019-05-17 | 2020-05-05 | Biosense Webster (Israel) Ltd. | Controlling appearance of displayed markers for improving catheter and tissue visibility |
| US11213309B2 (en) | 2019-05-23 | 2022-01-04 | Biosense Webster (Israel) Ltd. | Medical probe having improved maneuverability |
| US11426126B2 (en) | 2019-05-23 | 2022-08-30 | Biosense Webster (Israel) Ltd. | Indicating electrode contact |
| US20200375461A1 (en) | 2019-05-28 | 2020-12-03 | Biosense Webster (Israel) Ltd. | Flexible brain probe over guidewire |
| US20200375492A1 (en) | 2019-05-28 | 2020-12-03 | Biosense Webster (Israel) Ltd. | Brain signal tracking |
| US11510692B2 (en) | 2019-05-31 | 2022-11-29 | Biosense Webster (Israel) Ltd. | Ear-nose-throat (ENT) navigable shaver with ferromagnetic components |
| US20200397338A1 (en) | 2019-06-19 | 2020-12-24 | Biosense Webster (Israel) Ltd. | Multi-Arm Probe Rendering |
| US12089902B2 (en) | 2019-07-30 | 2024-09-17 | Coviden Lp | Cone beam and 3D fluoroscope lung navigation |
| US11896286B2 (en) | 2019-08-09 | 2024-02-13 | Biosense Webster (Israel) Ltd. | Magnetic and optical catheter alignment |
| US12114918B2 (en) | 2019-08-15 | 2024-10-15 | Biosense Webster (Israel) Ltd. | Dynamic ablation and sensing according to contact of segmented electrodes |
| US11759150B2 (en) | 2019-08-27 | 2023-09-19 | Biosense Webster (Israel) Ltd. | Accurate basket catheter tracking |
| US20210082157A1 (en) | 2019-09-12 | 2021-03-18 | Biosense Webster (Israel) Ltd. | Graphical user interface for an ablation system |
| US11918298B2 (en) | 2019-09-12 | 2024-03-05 | Biosense Webster (Israel) Ltd. | Very narrow probe with coil |
| US11344221B2 (en) | 2019-09-16 | 2022-05-31 | Biosense Webster (Israel) Ltd. | Flexible shielded position sensor |
| US11432754B2 (en) | 2019-09-24 | 2022-09-06 | Biosense Webster (Israel) Ltd. | Intracardiac electrocardiogram presentation |
| US20210093374A1 (en) | 2019-09-26 | 2021-04-01 | Biosense Webster (Israel) Ltd. | Wiring for Multi-Electrode Catheter |
| US11633228B2 (en) | 2019-10-04 | 2023-04-25 | Biosense Webster (Israel) Ltd. | Identifying pulmonary vein occlusion by dimension deformations of balloon catheter |
| US11633229B2 (en) | 2019-10-07 | 2023-04-25 | Biosense Webster (Israel) Ltd. | 3D electrical activity representation |
| US20210106382A1 (en) | 2019-10-10 | 2021-04-15 | Biosense Webster (Israel) Ltd. | Touch Indication of Balloon-Catheter Ablation Electrode via Balloon Surface Temperature Measurement |
| US11541212B2 (en) | 2019-10-18 | 2023-01-03 | Biosense Wester (Israel) Ltd. | Verifying proper withdrawal of catheter into sheath |
| USD922575S1 (en) | 2019-10-25 | 2021-06-15 | Renovia Inc. | Intravaginal device |
| US20210162210A1 (en) | 2019-12-03 | 2021-06-03 | Biosense Webster (Israel) Ltd. | Using reversible electroporation on cardiac tissue |
| US11872026B2 (en) * | 2019-12-04 | 2024-01-16 | Biosense Webster (Israel) Ltd. | Catheter contact force sensor |
| US11931182B2 (en) | 2019-12-09 | 2024-03-19 | Biosense Webster (Israel) Ltd. | Catheter with plurality of sensing electrodes used as ablation electrode |
| US20210169368A1 (en) | 2019-12-09 | 2021-06-10 | Biosense Webster (Israel) Ltd. | Determining release of implant from sheath based on measuring impedance |
| US20210177355A1 (en) | 2019-12-11 | 2021-06-17 | Biosense Webster (Israel) Ltd. | Balloon Catheter with Position Sensors |
| US11950930B2 (en) | 2019-12-12 | 2024-04-09 | Biosense Webster (Israel) Ltd. | Multi-dimensional acquisition of bipolar signals from a catheter |
| US11684302B2 (en) | 2019-12-13 | 2023-06-27 | Biosense Webster (Israel) Ltd. | Automated graphical presentation of electrophysiological parameters |
| US11517218B2 (en) | 2019-12-20 | 2022-12-06 | Biosense Webster (Israel) Ltd. | Selective graphical presentation of electrophysiological parameters |
| US12029862B2 (en) | 2019-12-20 | 2024-07-09 | Biosense Webster (Israel) Ltd. | Expandable assembly catheter |
| US20210186305A1 (en) | 2019-12-23 | 2021-06-24 | Biosense Webster (Israel) Ltd. | Deflectable medical probe having improved resistance to forces applied in rotation |
| US11998265B2 (en) | 2019-12-23 | 2024-06-04 | Biosense Webster (Israel) Ltd. | Respiration control during cardiac ablation |
| US11006902B1 (en) | 2019-12-23 | 2021-05-18 | Biosense Webster (Israel) Ltd. | GUI for selective operation of multi-electrode catheters |
| US11490850B2 (en) | 2019-12-23 | 2022-11-08 | Biosense Webster (Israel) Ltd. | Handling ectopic beats in electro-anatomical mapping of the heart |
| US11844603B2 (en) | 2019-12-24 | 2023-12-19 | Biosense Webster (Israel) Ltd. | Visualizing a treatment of breast cancer |
| US11484367B2 (en) | 2019-12-27 | 2022-11-01 | Biosense Webster (Israel) Ltd. | Device and method of determining location of sheath using electromagnetic sensors on sheath |
| US11819242B2 (en) | 2019-12-29 | 2023-11-21 | Biosense Webster (Israel) Ltd. | Navigated trocar with internal camera |
| US11786271B2 (en) | 2019-12-29 | 2023-10-17 | Biosense Webster (Israel) Ltd. | Trocar with modular obturator head |
| US20210196230A1 (en) | 2019-12-29 | 2021-07-01 | Biosense Webster (Israel) Ltd. | Position registered sideview ultrasound (us) imager inserted into brain via trocar |
| US20210196319A1 (en) | 2019-12-29 | 2021-07-01 | Biosense Webster (Israel) Ltd | Trocar with internal camera providing tilted view angle |
| US20210196315A1 (en) | 2019-12-29 | 2021-07-01 | Biosense Webster (Israel) Ltd. | Trocar with movable camera and built-in position sensor |
| US11712295B2 (en) | 2019-12-30 | 2023-08-01 | Biosense Webster (Israel) Ltd. | Multi-purpose sensing and radiofrequency (RF) ablation spiral electrode for catheter |
| US11737773B2 (en) | 2019-12-30 | 2023-08-29 | Biosense Webster (Israel) Ltd. | Non-circular working channel of an ear-nose-throat tool |
| US11553937B2 (en) | 2019-12-30 | 2023-01-17 | Biosense Webster (Israel) Ltd. | Deflection mechanism of an ear-nose-throat tool |
| US20210196370A1 (en) | 2019-12-30 | 2021-07-01 | Biosense Webster (Israel) Ltd. | Neurosurgery guidewire with integral connector for sensing and applying therapeutic electrical energy |
| US11541209B2 (en) | 2019-12-30 | 2023-01-03 | Biosense Webster (Israel) Ltd. | Preventing twisting of pull wires when deflecting an ear-nose-throat tool |
| US11589770B2 (en) | 2019-12-30 | 2023-02-28 | Biosense Webster (Israel) Ltd. | Location pad for neurosurgical procedures |
| US11723517B2 (en) | 2019-12-31 | 2023-08-15 | Biosense Webster (Israel) Ltd. | Wiring of trocar having movable camera and fixed position sensor |
| US11730414B2 (en) | 2020-01-21 | 2023-08-22 | Biosense Webster (Israel) Ltd. | Automatic pattern acquisition |
| US20210228895A1 (en) * | 2020-01-27 | 2021-07-29 | Alternating Current Treatment Therapy Medical Inc. | Method and apparatus for inhibiting the growth of proliferating cells or viruses |
| US11707341B2 (en) | 2020-03-02 | 2023-07-25 | Biosense Webster (Israel) Ltd. | Jig for assembling a position sensor |
| US20210278936A1 (en) | 2020-03-09 | 2021-09-09 | Biosense Webster (Israel) Ltd. | Electrophysiological user interface |
| USD971227S1 (en) | 2020-03-12 | 2022-11-29 | Biosense Webster (Israel) Ltd. | Display screen or portion thereof with icon |
| US20210290094A1 (en) | 2020-03-23 | 2021-09-23 | Biosense Webster (Israel) Ltd. | Pacing induced electrical activation grading |
| US11628304B2 (en) | 2020-03-31 | 2023-04-18 | Biosense Webster (Israel) Ltd. | Detection and mapping of phrenic nerve by pacing |
| US11571260B2 (en) | 2020-03-31 | 2023-02-07 | Biosense Webster (Israel) Ltd. | Pre-operative registration of anatomical images with a position-tracking system using ultrasound measurement of skin tissue |
| US11832883B2 (en) | 2020-04-23 | 2023-12-05 | Johnson & Johnson Surgical Vision, Inc. | Using real-time images for augmented-reality visualization of an ophthalmology surgical tool |
| US20210330395A1 (en) | 2020-04-23 | 2021-10-28 | Johnson & Johnson Surgical Vision, Inc. | Location pad surrounding at least part of patient eye for tracking position of a medical instrument |
| WO2021216089A1 (en) * | 2020-04-24 | 2021-10-28 | Milestone Scientific, Inc. | Device and method for needle/catheter location utilizing correlation analysis |
| US20210330349A1 (en) | 2020-04-24 | 2021-10-28 | Milestone Scientific, Inc. | Device and Method for Needle/Catheter Location Utilizing Correlation Analysis |
| CN115461944A (zh) | 2020-04-27 | 2022-12-09 | 苹果公司 | 具有受控波长的集成垂直发射器结构 |
| USD1039141S1 (en) | 2020-04-27 | 2024-08-13 | Acclarent, Inc. | Flex section in shaft for ENT instrument |
| US11553961B2 (en) | 2020-04-30 | 2023-01-17 | Biosense Webster (Israel) Ltd. | Catheter with stretchable irrigation tube |
| IL282631A (en) | 2020-05-04 | 2021-12-01 | Biosense Webster Israel Ltd | Device, system and method for performing cardiac tissue ablation |
| US20210361352A1 (en) | 2020-05-19 | 2021-11-25 | Biosense Webster (Israel) Ltd. | Esophageal-tissue temperature monitoring |
| US20210369338A1 (en) | 2020-06-01 | 2021-12-02 | Biosense Webster (Israel) Ltd. | Application of irreversible electroporation (ire) ablation using catheter with electrode array |
| US11987017B2 (en) | 2020-06-08 | 2024-05-21 | Biosense Webster (Israel) Ltd. | Features to assist in assembly and testing of devices |
| US11794004B2 (en) | 2020-06-10 | 2023-10-24 | Biosense Webster (Israel) Ltd. | Electroporation with cooling |
| US20210401491A1 (en) | 2020-06-29 | 2021-12-30 | Biosense Webster (Israel) Ltd. | Estimating progress of irreversible electroporation ablation based on amplitude of measured bipolar signals |
| US20220000543A1 (en) | 2020-07-06 | 2022-01-06 | Biosense Webster (Israel) Ltd. | Bipolar tissue ablation in accordance with a predefined periodic set of time slots |
| US20220008249A1 (en) | 2020-07-07 | 2022-01-13 | Johnson & Johnson Surgical Vision, Inc. | Ophthalmic curette |
| US20220008123A1 (en) | 2020-07-13 | 2022-01-13 | Biosense Webster (Israel) Ltd. | Sequential activation of electrode-pairs during irreversible electroporation (ire) |
| US20220031385A1 (en) | 2020-07-28 | 2022-02-03 | Biosense Webster (Israel) Ltd. | Automatically performing irreversible electroporation ablation during heart refractory period |
| US20220031386A1 (en) | 2020-07-28 | 2022-02-03 | Biosense Webster (Israel) Ltd. | Controlling irreversible electroporation ablation using a focal catheter having contact-force and temperature sensors |
| US11357594B2 (en) | 2020-08-07 | 2022-06-14 | Johnson & Johnson Surgical Vision, Inc. | Jig assembled on stereoscopic surgical microscope for applying augmented reality techniques to surgical procedures |
| US12004862B2 (en) | 2020-08-27 | 2024-06-11 | Biosense Webster (Israel) Ltd. | Removing far-field from intracardiac signals |
| US20220061913A1 (en) | 2020-08-28 | 2022-03-03 | Biosense Webster (Israel) Ltd. | Proximal Electrode Cooling |
| US20220061768A1 (en) | 2020-09-01 | 2022-03-03 | Biosense Webster (Israel) Ltd. | Removing noise from cardiac signals |
| US20220071695A1 (en) | 2020-09-10 | 2022-03-10 | Biosense Webster (Israel) Ltd. | Flex Circuit and Surface Mounted Electrode Catheter |
| US12048479B2 (en) | 2020-09-10 | 2024-07-30 | Biosense Webster (Israel) Ltd. | Surface mounted electrode catheter |
| US11950841B2 (en) | 2020-09-22 | 2024-04-09 | Biosense Webster (Israel) Ltd. | Basket catheter having insulated ablation electrodes and diagnostic electrodes |
| US11950840B2 (en) | 2020-09-22 | 2024-04-09 | Biosense Webster (Israel) Ltd. | Basket catheter having insulated ablation electrodes |
| US20220087736A1 (en) | 2020-09-23 | 2022-03-24 | Biosense Webster (Israel) Ltd. | Electrode shorting |
| US12082875B2 (en) | 2020-09-24 | 2024-09-10 | Biosense Webster (Israel) Ltd | Balloon catheter having a coil for sensing tissue temperature and position of the balloon |
| US20220096150A1 (en) | 2020-09-28 | 2022-03-31 | Biosense Webster (Israel) Ltd. | Displaying Indications of Mutual Distances Among Electrodes of a Flexible Ablation Catheter |
| US20220095942A1 (en) | 2020-09-29 | 2022-03-31 | Biosense Webster (Israel) Ltd. | Real time removal of ep parameter outliers from visual map |
| US11918281B2 (en) | 2020-10-07 | 2024-03-05 | Biosense Webster (Israel) Ltd. | Folding fan catheter with electrodes |
| US12023106B2 (en) | 2020-10-12 | 2024-07-02 | Johnson & Johnson Surgical Vision, Inc. | Virtual reality 3D eye-inspection by combining images from position-tracked optical visualization modalities |
| US11974803B2 (en) | 2020-10-12 | 2024-05-07 | Biosense Webster (Israel) Ltd. | Basket catheter with balloon |
| US12045957B2 (en) | 2020-10-21 | 2024-07-23 | Johnson & Johnson Surgical Vision, Inc. | Visualizing an organ using multiple imaging modalities combined and displayed in virtual reality |
| US11904109B2 (en) | 2020-10-30 | 2024-02-20 | Biosense Webster (Israel) Ltd. | Catheter introducer |
| US20220133206A1 (en) | 2020-11-03 | 2022-05-05 | Biosense Webster (Israel) Ltd. | Recording apparatus noise reduction |
| US20220160251A1 (en) | 2020-11-25 | 2022-05-26 | Biosense Webster (Israel) Ltd. | Acquisition guidance for electroanatomical mapping |
| US11694401B2 (en) | 2020-11-25 | 2023-07-04 | Biosense Webster (Israel) Ltd. | Reconstruction of registered geometry based on constant fluoroscopic snapshot |
| US20220183748A1 (en) | 2020-12-16 | 2022-06-16 | Biosense Webster (Israel) Ltd. | Accurate tissue proximity |
| US12070277B2 (en) | 2020-12-16 | 2024-08-27 | Biosense Webster (Israel) Ltd. | Regional resolution in fast anatomical mapping |
| US20220193370A1 (en) | 2020-12-17 | 2022-06-23 | Biosense Webster (Israel) Ltd. | Accurate Measurement of Distal End Dimension |
| US20220192737A1 (en) | 2020-12-22 | 2022-06-23 | Biosense Webster (Israel) Ltd. | Improving lesion uniformity in bipolar cardiac ablation |
| US11864844B2 (en) | 2020-12-22 | 2024-01-09 | Biosense Webster (Israel) Ltd. | Distal end assembly guidance |
| US20220192748A1 (en) | 2020-12-22 | 2022-06-23 | Biosense Webster (Israel) Ltd. | Displaying annotations on design line formed on anatomical map |
| US12064250B2 (en) | 2020-12-28 | 2024-08-20 | Biosense Webster (Israel) Ltd. | Generic box for electrophysiology system adapters |
| US12102381B2 (en) | 2021-02-26 | 2024-10-01 | Biosense Webster (Israel) Ltd. | Focal ablation catheter incorporating a guidewire inserted through irrigation channel |
| US20220287764A1 (en) | 2021-03-10 | 2022-09-15 | Biosense Webster (Israel) Ltd. | Initiating ire generation with a ramp |
| US12082881B2 (en) | 2021-03-22 | 2024-09-10 | Biosense Webster (Israel) Ltd. | Visualizing multiple parameters overlaid on an anatomical map |
| CN113171177B (zh) * | 2021-04-07 | 2023-02-17 | 上海交通大学 | 可捕捉腰椎穿刺组织层突破感的人机交互控制方法及系统 |
| US11915416B2 (en) | 2021-04-20 | 2024-02-27 | Biosense Webster (Israel) Ltd. | Multi-layered visualization of data points over heart map |
| US20220370128A1 (en) | 2021-05-18 | 2022-11-24 | Biosense Webster (Israel) Ltd. | Efficiency of ire ablation procedure by applying stress signal to target tissue |
| US20220370145A1 (en) | 2021-05-24 | 2022-11-24 | Biosense Webster (Israel) Ltd. | Gesture based selection of portion of catheter |
| US20220387100A1 (en) | 2021-06-07 | 2022-12-08 | Biosense Webster (Israel) Ltd. | Bipolar electrode pair selection |
| US20220387099A1 (en) | 2021-06-07 | 2022-12-08 | Biosense Webster (Israel) Ltd. | Automatic anatomical feature identification and map segmentation |
| US20220395214A1 (en) | 2021-06-09 | 2022-12-15 | Biosense Webster (Israel) Ltd. | Wave propagation control enhancement |
| US20220395321A1 (en) | 2021-06-10 | 2022-12-15 | Biosense Webster (Israel) Ltd. | Follow wave propagation |
| US20220395215A1 (en) | 2021-06-15 | 2022-12-15 | Biosense Webster (Israel) Ltd. | Visualization of electrical signals propagating over the surface of patient organ |
| US20220409172A1 (en) | 2021-06-24 | 2022-12-29 | Biosense Webster (Israel) Ltd. | Reconstructing a 4d shell of a volume of an organ using a 4d ultrasound catheter |
| US20220409167A1 (en) | 2021-06-24 | 2022-12-29 | Biosense Webster (Israel) Ltd. | Visualization of 4d ultrasound maps |
| US12016728B2 (en) | 2021-06-24 | 2024-06-25 | Biosense Webster (Israel) Ltd. | Estimating strain on tissue using 4D ultrasound catheter |
| US11771339B2 (en) | 2021-06-29 | 2023-10-03 | Biosense Webster (Israel) Ltd. | Heterodyne catheter calibration system |
| US20230008606A1 (en) | 2021-07-06 | 2023-01-12 | Biosense Webster (Israel) Ltd. | Contact assessment for balloon catheter |
| US20230015298A1 (en) | 2021-07-13 | 2023-01-19 | Biosense Webster (Isreal) Ltd. | Ablation electrodes made from electrical traces of flexible printed circuit board |
| US12070264B2 (en) | 2021-07-23 | 2024-08-27 | Biosense Webster (Israel) Ltd. | Accurate tissue proximity |
| US20230042941A1 (en) | 2021-08-06 | 2023-02-09 | Biosense Webster (Israel) Ltd. | Graphical user interface template for reducing setup time of electrophysiological procedures |
| US20230050590A1 (en) | 2021-08-12 | 2023-02-16 | Biosense Webster (Israel) Ltd. | Presenting quality measures of tissue ablation in a blood vessel using a two-dimensional map |
| US20230052130A1 (en) | 2021-08-12 | 2023-02-16 | Biosense Webster (Israel) Ltd. | Electro-anatomical mapping and annotation presented in electrophysiological procedures |
| US11972855B2 (en) | 2021-08-12 | 2024-04-30 | Biosense Webster (Israel) Ltd. | Assessing lesions formed in an ablation procedure |
| US20230053064A1 (en) | 2021-08-16 | 2023-02-16 | Biosense Webster (Israel) Ltd. | Catheter having electrodes with adjustable size |
| US20230051310A1 (en) | 2021-08-16 | 2023-02-16 | Biosense Webster (Israel) Ltd. | Phrenic nerve warning |
| US20230056388A1 (en) | 2021-08-23 | 2023-02-23 | Biosense Webster (Israel) Ltd. | Identifying a vortex in an electro-anatomical map |
| US12114905B2 (en) | 2021-08-27 | 2024-10-15 | Biosense Webster (Israel) Ltd. | Reinforcement and stress relief for an irrigated electrophysiology balloon catheter with flexible-circuit electrodes |
| US12048562B2 (en) | 2021-08-31 | 2024-07-30 | Biosense Webster (Israel) Ltd. | Reducing perceived latency of catheters |
| US20230088042A1 (en) | 2021-09-20 | 2023-03-23 | Biosense Webster (Israel) Ltd. | Ablating a region of patient organ using selected ablation electrodes of an expandable catheter |
| US20230091133A1 (en) | 2021-09-23 | 2023-03-23 | Biosense Webster (Israel) Ltd. | Magnetic location sensor and ultrasound array on printed-circuit-board (pcb) of catheter and calibration thereof |
| US20230091996A1 (en) | 2021-09-23 | 2023-03-23 | Biosense Webster (Israel) Ltd. | Ultrasound imaging of cardiac anatomy using doppler analysis |
| US11903656B2 (en) | 2021-09-24 | 2024-02-20 | Biosense Webster (Israel) Ltd. | Automatic control and enhancement of 4D ultrasound images |
| EP4169463A3 (de) | 2021-09-30 | 2023-07-05 | Biosense Webster (Israel) Ltd | Vorrichtungen für einen expandierbaren montagekatheter |
| US20230117302A1 (en) | 2021-10-14 | 2023-04-20 | Johnson & Johnson Surgical Vision, Inc. | Robotic movement for vision care surgery mimicking probe navigated by magnetic tracking |
| US20230120856A1 (en) | 2021-10-14 | 2023-04-20 | Biosense Webster (Israel) Ltd. | High frequency unipolar electroporation ablation |
| US20230128764A1 (en) | 2021-10-25 | 2023-04-27 | Biosense Webster (Israel) Ltd. | Training system for a neural network to guide a robotic arm to operate a catheter |
| US20230147259A1 (en) | 2021-11-10 | 2023-05-11 | Biosense Webster (Israel) Ltd. | Estimating contact force applied between catheter and tissue using transmitter and receivers of the catheter |
| US20230157569A1 (en) | 2021-11-22 | 2023-05-25 | Biosense Webster (Israel) Ltd. | Mapping System with Real Time Electrogram Overlay |
| US20230157616A1 (en) | 2021-11-22 | 2023-05-25 | Biosense Webster (Israel) Ltd. | Transient Event Identification |
| WO2023094951A1 (en) | 2021-11-29 | 2023-06-01 | Johnson & Johnson Surgical Vision, Inc. | Ophthalmic curette |
| US20230172512A1 (en) | 2021-12-06 | 2023-06-08 | Biosense Webster (Israel) Ltd. | Catheter connection configuration system |
| US20230190382A1 (en) | 2021-12-20 | 2023-06-22 | Biosense Webster (Israel) Ltd. | Directing an ultrasound probe using known positions of anatomical structures |
| US20230190233A1 (en) | 2021-12-20 | 2023-06-22 | Biosense Webster (Israel) Ltd. | Visualization of change in anatomical slope using 4d ultrasound catheter |
| US20230211118A1 (en) | 2021-12-30 | 2023-07-06 | Biosense Webster (Israel) Ltd. | Soldering Leads to Pads in Producing Basket Catheter |
| US20230210592A1 (en) | 2021-12-30 | 2023-07-06 | Biosense Webster (Israel) Ltd. | Dual balloons for pulmonary vein isolation |
| US20230210588A1 (en) | 2021-12-30 | 2023-07-06 | Biosense Webster (Israel) Ltd. | Basket Catheter Having Ablation Electrodes and Electro-Anatomical Sensing Electrodes |
| US20230210437A1 (en) | 2021-12-30 | 2023-07-06 | Biosense Webster (Israel) Ltd. | Intuitive Mapping System |
| US20230210589A1 (en) | 2021-12-30 | 2023-07-06 | Biosense Webster (Israel) Ltd. | Basket Catheter Having Ablation Electrodes and Temperature Sensors |
| US20230218272A1 (en) | 2022-01-10 | 2023-07-13 | Biosense Webster (Israel) Ltd. | Controlling and visualizing rotation and deflection of a 4d ultrasound catheter having multiple shafts |
| US20230263452A1 (en) | 2022-02-22 | 2023-08-24 | Biosense Webster (Israel) Ltd. | Automatic storage and display of ecg signals indicative of atrial fibrillation |
| US11900524B2 (en) | 2022-03-03 | 2024-02-13 | Biosense Webster (Israel) Ltd. | Constructing topography of lumen wall in 4D ultrasound image with virtual ellipsoid or polyhedron |
| IL315192A (en) | 2022-03-03 | 2024-10-01 | Biosense Webster Israel Ltd | Displaying markings on the walls of cavities in the ears, nose and throat to improve navigation of AEG tools. |
| CN114668362B (zh) * | 2022-03-18 | 2022-11-11 | 元化智能科技(深圳)有限公司 | 无线胶囊内窥镜的定位系统、装置及计算机设备 |
| US20230309853A1 (en) | 2022-03-31 | 2023-10-05 | Biosense Webster (Israel) Ltd. | Noise in electro-anatomic signals |
| US20230329678A1 (en) | 2022-04-14 | 2023-10-19 | Biosense Webster (Israel) Ltd. | Augmented ultrasonic images |
| US20230329617A1 (en) | 2022-04-15 | 2023-10-19 | Biosense Webster (Israel) Ltd. | Neural network intracardiac egm annotation |
| US20230329779A1 (en) | 2022-04-18 | 2023-10-19 | Biosense Webster (Israel) Ltd. | Switching unit for operating a multi-catheter system |
| US20230337960A1 (en) | 2022-04-20 | 2023-10-26 | Biosense Webster (Israel) Ltd. | Projecting activation wave velocity onto mapped cardiac chamber |
| US20230355159A1 (en) | 2022-05-04 | 2023-11-09 | Biosense Webster (Israel) Ltd. | Detecting potential slow-conduction cardiac tissue areas in stable arrhythmias |
| US20230372021A1 (en) | 2022-05-20 | 2023-11-23 | Biosense Webster (Israel) Ltd. | Displaying orthographic and endoscopic views of a plane selected in a three-dimensional anatomical image |
| US20230404676A1 (en) | 2022-05-20 | 2023-12-21 | Biosense Webster (Israel) Ltd. | Visualizing a quality index indicative of ablation stability at ablation site |
| US20230380890A1 (en) | 2022-05-26 | 2023-11-30 | Biosense Webster (Israel) Ltd. | Transseptal tissue puncture apparatuses, systems, and methods |
| US20230404644A1 (en) | 2022-06-16 | 2023-12-21 | Biosense Webster (Israel) Ltd. | High power multiplexer with low power components |
| US20230404677A1 (en) | 2022-06-20 | 2023-12-21 | Biosense Webster (Israel) Ltd. | Applying ablation signals to both sides of tissue |
| US20240000420A1 (en) | 2022-06-29 | 2024-01-04 | Biosense Webster (Israel) Ltd. | Systems and methods for cavity imaging in patient organ based on position of 4d ultrasound catheter |
| US20240016435A1 (en) | 2022-07-12 | 2024-01-18 | Biosense Webster (Israel) Ltd. | Location-based pattern matching of coronary sinus (cs) signals |
| US20240050017A1 (en) | 2022-08-10 | 2024-02-15 | Biosense Webster (Israel) Ltd. | Visualizing and Clustering Multiple Electrodes of a High-Definition Catheter Projected on Tissue Surface |
| US20240058073A1 (en) | 2022-08-18 | 2024-02-22 | Biosense Webster (Israel) Ltd. | Multi-arm Catheter with Improved Magnetic Location Tracking |
| US20240074725A1 (en) | 2022-09-01 | 2024-03-07 | Biosense Webster (Israel) Ltd. | Safety alert based on 4d intracardiac echo (ice) catheter tracking |
| EP4406504A1 (de) | 2023-01-25 | 2024-07-31 | Biosense Webster (Israel) Ltd. | Elektrodendesigns für katheter |
| CN117018438B (zh) * | 2023-08-21 | 2024-10-18 | 北京老年医院 | 一种可视临时起搏器电极 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3644825A (en) | 1969-12-31 | 1972-02-22 | Texas Instruments Inc | Magnetic detection system for detecting movement of an object utilizing signals derived from two orthogonal pickup coils |
| US3868565A (en) | 1973-07-30 | 1975-02-25 | Jack Kuipers | Object tracking and orientation determination means, system and process |
| US4095698A (en) | 1976-08-02 | 1978-06-20 | Wright C E | Modular storage rack system |
| GB2155736A (en) * | 1984-03-08 | 1985-09-25 | Smiths Industries Plc | Aircraft position determination |
| US4697595A (en) | 1984-07-24 | 1987-10-06 | Telectronics N.V. | Ultrasonically marked cardiac catheters |
| JPS6268442A (ja) * | 1985-09-24 | 1987-03-28 | 株式会社東芝 | 超音波診断装置 |
| US4821731A (en) | 1986-04-25 | 1989-04-18 | Intra-Sonix, Inc. | Acoustic image system and method |
| US4771788A (en) * | 1986-07-18 | 1988-09-20 | Pfizer Hospital Products Group, Inc. | Doppler tip wire guide |
| US4945305A (en) * | 1986-10-09 | 1990-07-31 | Ascension Technology Corporation | Device for quantitatively measuring the relative position and orientation of two bodies in the presence of metals utilizing direct current magnetic fields |
| US5265611A (en) | 1988-09-23 | 1993-11-30 | Siemens Aktiengellschaft | Apparatus for measuring weak, location-dependent and time-dependent magnetic field |
| DE3914619A1 (de) * | 1989-05-03 | 1990-11-08 | Kontron Elektronik | Vorrichtung zur transoesophagealen echokardiographie |
| EP0419729A1 (de) | 1989-09-29 | 1991-04-03 | Siemens Aktiengesellschaft | Ortung eines Katheters mittels nichtionisierender Felder |
| US5057095A (en) | 1989-11-16 | 1991-10-15 | Fabian Carl E | Surgical implement detector utilizing a resonant marker |
| US5253647A (en) | 1990-04-13 | 1993-10-19 | Olympus Optical Co., Ltd. | Insertion position and orientation state pickup for endoscope |
| GB9018660D0 (en) * | 1990-08-24 | 1990-10-10 | Imperial College | Probe system |
| GB9025431D0 (en) * | 1990-11-22 | 1991-01-09 | Advanced Tech Lab | Three dimensional ultrasonic imaging |
| US5231989A (en) * | 1991-02-15 | 1993-08-03 | Raychem Corporation | Steerable cannula |
| US5211165A (en) | 1991-09-03 | 1993-05-18 | General Electric Company | Tracking system to follow the position and orientation of a device with radiofrequency field gradients |
| US5255680A (en) | 1991-09-03 | 1993-10-26 | General Electric Company | Automatic gantry positioning for imaging systems |
| US5265610A (en) | 1991-09-03 | 1993-11-30 | General Electric Company | Multi-planar X-ray fluoroscopy system using radiofrequency fields |
| US5251635A (en) | 1991-09-03 | 1993-10-12 | General Electric Company | Stereoscopic X-ray fluoroscopy system using radiofrequency fields |
| US5425367A (en) * | 1991-09-04 | 1995-06-20 | Navion Biomedical Corporation | Catheter depth, position and orientation location system |
| US5255684A (en) * | 1991-10-25 | 1993-10-26 | Interspec, Inc. | Ultrasonic probe assembly |
| US5271400A (en) | 1992-04-01 | 1993-12-21 | General Electric Company | Tracking system to monitor the position and orientation of a device using magnetic resonance detection of a sample contained within the device |
| US5318025A (en) | 1992-04-01 | 1994-06-07 | General Electric Company | Tracking system to monitor the position and orientation of a device using multiplexed magnetic resonance detection |
| WO1993020878A1 (en) * | 1992-04-10 | 1993-10-28 | Cardiorhythm | Shapable handle for steerable electrode catheter |
| US5295484A (en) * | 1992-05-19 | 1994-03-22 | Arizona Board Of Regents For And On Behalf Of The University Of Arizona | Apparatus and method for intra-cardiac ablation of arrhythmias |
| US5373845A (en) * | 1992-05-22 | 1994-12-20 | Echo Cath, Ltd. | Apparatus and method for forward looking volume imaging |
| WO1994003227A1 (en) * | 1992-07-31 | 1994-02-17 | Christodoulos Stefanadis | Steerable cardiac catheter |
| AU675077B2 (en) * | 1992-08-14 | 1997-01-23 | British Telecommunications Public Limited Company | Position location system |
| DE4238176A1 (de) * | 1992-11-12 | 1994-05-19 | Ulrich Dipl Ing Nagel | Miniatur-Ultraschallsonde für medizinische Anwendungen |
| JP3354619B2 (ja) * | 1993-03-12 | 2002-12-09 | オリンパス光学工業株式会社 | 超音波診断装置 |
| US5391199A (en) * | 1993-07-20 | 1995-02-21 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias |
-
1995
- 1995-01-24 CA CA2607769A patent/CA2607769C/en not_active Expired - Lifetime
- 1995-01-24 CN CNB95195606XA patent/CN1226960C/zh not_active Expired - Lifetime
- 1995-01-24 AT AT95908708T patent/ATE188108T1/de not_active IP Right Cessation
- 1995-01-24 DE DE69514238T patent/DE69514238T2/de not_active Expired - Lifetime
- 1995-01-24 ES ES98203767T patent/ES2210662T3/es not_active Expired - Lifetime
- 1995-01-24 ES ES95908708T patent/ES2144123T3/es not_active Expired - Lifetime
- 1995-01-24 AT AT98203767T patent/ATE253864T1/de not_active IP Right Cessation
- 1995-01-24 JP JP50803396A patent/JP3708121B2/ja not_active Expired - Lifetime
- 1995-01-24 EP EP95908708A patent/EP0776176B1/de not_active Expired - Lifetime
- 1995-01-24 WO PCT/US1995/001103 patent/WO1996005768A1/en active IP Right Grant
- 1995-01-24 AU AU16930/95A patent/AU1693095A/en not_active Abandoned
- 1995-01-24 DE DE69532139T patent/DE69532139T2/de not_active Expired - Lifetime
- 1995-01-24 CA CA002197986A patent/CA2197986C/en not_active Expired - Lifetime
- 1995-01-24 EP EP98203767A patent/EP0894473B1/de not_active Expired - Lifetime
-
1998
- 1998-06-24 HK HK98106275A patent/HK1007059A1/xx not_active IP Right Cessation
-
2004
- 2004-04-14 JP JP2004119194A patent/JP2004275776A/ja not_active Withdrawn
- 2004-04-14 JP JP2004119198A patent/JP4025309B2/ja not_active Expired - Lifetime
-
2008
- 2008-11-19 JP JP2008295901A patent/JP4394733B2/ja not_active Expired - Lifetime
-
2009
- 2009-06-24 JP JP2009149546A patent/JP4448194B2/ja not_active Expired - Lifetime
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6957101B2 (en) | 2002-08-21 | 2005-10-18 | Joshua Porath | Transient event mapping in the heart |
| US7090639B2 (en) | 2003-05-29 | 2006-08-15 | Biosense, Inc. | Ultrasound catheter calibration system |
| US7749168B2 (en) | 2003-11-21 | 2010-07-06 | Siemens Aktiengesellschaft | Medical system for examination or treatment |
| US7366563B2 (en) | 2003-12-15 | 2008-04-29 | Siemens Aktiengesellschaft | Catheter device |
| US8046049B2 (en) | 2004-02-23 | 2011-10-25 | Biosense Webster, Inc. | Robotically guided catheter |
| US8214019B2 (en) | 2004-02-23 | 2012-07-03 | Biosense Webster, Inc. | Robotically guided catheter |
| US8615288B2 (en) | 2004-02-23 | 2013-12-24 | Biosense Webster, Inc. | Robotically guided catheter |
| US8078286B2 (en) | 2006-11-30 | 2011-12-13 | Biosense Webster, Inc. | Techniques for minimizing radiofrequency-induced tissue heating |
| EP4324508A4 (de) * | 2021-04-15 | 2024-02-21 | Shanghai Microport Ep Medtech Co., Ltd. | Medizinischer katheter und dreidimensionales magnetisches positionierungssystem |
Also Published As
| Publication number | Publication date |
|---|---|
| DE69532139T2 (de) | 2004-08-26 |
| JP4394733B2 (ja) | 2010-01-06 |
| ES2210662T3 (es) | 2004-07-01 |
| EP0894473A2 (de) | 1999-02-03 |
| EP0776176A1 (de) | 1997-06-04 |
| WO1996005768A1 (en) | 1996-02-29 |
| JP2004275776A (ja) | 2004-10-07 |
| ATE188108T1 (de) | 2000-01-15 |
| HK1007059A1 (en) | 1999-04-01 |
| JP2004283601A (ja) | 2004-10-14 |
| CA2607769C (en) | 2012-04-24 |
| JP2009066429A (ja) | 2009-04-02 |
| AU1693095A (en) | 1996-03-14 |
| JP4025309B2 (ja) | 2007-12-19 |
| ES2144123T3 (es) | 2000-06-01 |
| JP4448194B2 (ja) | 2010-04-07 |
| CA2607769A1 (en) | 1996-02-29 |
| JPH10507104A (ja) | 1998-07-14 |
| CA2197986C (en) | 2008-03-18 |
| JP3708121B2 (ja) | 2005-10-19 |
| CA2197986A1 (en) | 1996-02-29 |
| EP0894473A3 (de) | 1999-07-07 |
| CN1226960C (zh) | 2005-11-16 |
| JP2009207926A (ja) | 2009-09-17 |
| DE69532139D1 (de) | 2003-12-18 |
| CN1168625A (zh) | 1997-12-24 |
| EP0894473B1 (de) | 2003-11-12 |
| DE69514238T2 (de) | 2000-05-11 |
| ATE253864T1 (de) | 2003-11-15 |
| DE69514238D1 (de) | 2000-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0776176B1 (de) | Medizinisches diagnose-, behandlungs- und darstellungssystem | |
| US6690963B2 (en) | System for determining the location and orientation of an invasive medical instrument | |
| US5546951A (en) | Method and apparatus for studying cardiac arrhythmias | |
| US6063022A (en) | Conformal catheter | |
| US6233476B1 (en) | Medical positioning system | |
| KR20030069111A (ko) | 실시간 초음파 영상을 사용한 위치 감지 | |
| JP2005128035A (ja) | 電磁場を検出する装置 | |
| Placidi et al. | Review on patents about magnetic localisation systems for in vivo catheterizations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19970219 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE DE ES FR GB IT NL SE |
|
| 17Q | First examination report despatched |
Effective date: 19980409 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE DE ES FR GB IT NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19991229 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19991229 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19991229 |
|
| REF | Corresponds to: |
Ref document number: 188108 Country of ref document: AT Date of ref document: 20000115 Kind code of ref document: T |
|
| ET | Fr: translation filed | ||
| REF | Corresponds to: |
Ref document number: 69514238 Country of ref document: DE Date of ref document: 20000203 |
|
| ITF | It: translation for a ep patent filed | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2144123 Country of ref document: ES Kind code of ref document: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20131211 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20140122 Year of fee payment: 20 Ref country code: NL Payment date: 20140110 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20140115 Year of fee payment: 20 Ref country code: FR Payment date: 20140108 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20140122 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69514238 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69514238 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: V4 Effective date: 20150124 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20150123 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20150331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20150125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20150123 |